Изобретение относится к области гидролокации и предназначено для обнаружения подводных целей в прибрежных морских областях, а также в речных руслах, каналах, озерах.
Предложенный метод и система гидролокации могут быть использованы в мелководных областях при проведении подводных работ, контроле состояния подводных сооружений и подводной обстановки в портах, при поисковых и спасательных работах, осуществлении охраны сооружений на берегу со стороны водной среды от подводных пловцов-нарушителей или подводных сооружений, проложенных под водой кабелей, коллекторов, трубопроводов, судов на стоянке, нефтяных платформ, входов в бухты и в порты, мостов, каналов, акваторий гидростанций.
Недостатком традиционных методов гидролокации для этих целей в условиях мелководья, когда излучатель зондирующих акустических сигналов и приемник отраженных сигналов от целей в воде совмещены, являются ограничения по дальности обнаружения целей, обусловленные значительным спадом с расстоянием энергии отраженного от подводной цели зондирующего сигнала из-за его рассеяния при отражении от цели и поглощения энергии звука при распространении в воде, а также из-за эффектов рефракции звуковых лучей в водном слое и касания ими дна и водной поверхности, возникающих из-за локальных изменений скорости звука в воде в результате неравномерного прогрева водного слоя при изменении погодных условий и сезонных колебаниях температуры воздуха в широких пределах. Этим объясняется то, что предельные дальности обнаружения подводных целей при гидролокации в условиях мелководья обычно не превышают 100-200 м.
Для расширения зоны действия систем обычно наращивают число гидролокаторов в контролируемой зоне.
Так, в изобретении по патенту США №5305286 описана рубежная система охраны с излучением зондирующего сигнала вдоль водного слоя, организованная путем наращивания числа гидролокаторов вдоль охраняемого рубежа для увеличения длины охраняемого рубежа.
Близкими по замыслу являются гидроакустические средства ЗАВЕСА ГУП "Дедал" и ДЕЛЬФИН ФГУП "НИИ "Атолл", представляющие цепочку приемоизлучателей, устанавливаемых на дне и соединенных общим кабелем, с излучением, направленным вертикально в сторону водной поверхности.
Данные решения представляются сложными по изготовлению и использованию и неоправданно дорогими.
Не менее сложными и дорогими представляются известные решения, при которых излучатель зондирующих сигналов и приемники сигналов, отраженных от целей, разделены в пространстве. Их сложность и дороговизна обусловлены, в основном, необходимостью выполнять хотя бы одно из устройств - излучатель или приемник - многолучевым или снабжать их системой сканирования контролируемой зоны в горизонтальной плоскости узким лучом для определения пеленга на цель. Вариант такой системы описан в изобретении по патенту США №5237541, где для организации оперативного мониторинга водной среды в воду опускаются с вертолета гидролокатор и буи-приемники сигналов, отраженных от подводных целей.
Задача, на решение которой направлено предложенное изобретение, заключается в создании способа и системы гидролокации с простой реализацией и расширенной областью применения, позволяющих обнаруживать цель и определять ее местоположение в водной толще.
Для решения поставленной задачи предложен метод обнаружения цели в водной толще и определения ее местоположения, включающий продольное волновое зондирование и прием отраженных от цели зондирующих сигналов. При этом излучение зондирующих сигналов осуществляют из зоны наблюдения, а прием отраженных от подводных целей сигналов ведут на несколько, минимум на три, разнесенных между собой приемников, образующих внутри ограниченного ими пространства зону контроля, с известными координатами, пространственно отнесенных от излучателя и располагаемых в области ожидаемого появления целей, и регистрируют время прихода на приемники отраженных от цели зондирующих сигналов. Местоположение обнаруженной цели в зоне контроля определяют с использованием компьютерного моделирования решением геометрической задачи в горизонтальной плоскости по времени прихода на приемники отраженного от цели зондирующего сигнала, отсчитываемого относительно момента излучения, с учетом скорости звука в воде и известного положения излучателя и приемников.
Также предложена система для осуществления метода, содержащая излучатель зондирующих сигналов в водной среде и приемники отраженных от подводной цели зондирующих сигналов, которые соединяются с электронным комплексом обработки данных. Электронный комплекс обработки данных может состоять из ряда соединенных между собой электронных блоков излучения, приема, обработки, передачи и представления данных на индикаторе обзора охраняемой зоны.
Система предназначена для контроля и охраны области, занимаемой приемниками, отнесенной от места, где расположен излучатель. Такая система может быть использована для контроля подводной обстановки на дальних подступах к охраняемым объектам, расположенным на берегу, или подводных сооружений, а также для охраны опор мостов, судов на стоянке или входе в бухту.
Особенностью метода и системы на его основе является выполнение излучателя в виде гидроакустической антенны с характеристикой направленности в горизонтальной плоскости, ограниченной сектором облучения охраняемой зоны, а приемников - с круговой характеристикой направленности в горизонтальной плоскости.
Излучатель направляет зондирующие импульсы акустической энергии одновременно по всем направлениям в пределах выделенного сектора, которые, отражаясь от подводной цели, достигают приемников.
При обнаружении цели время прихода на каждый из приемников сигнала, отраженного от цели, отсчитывается относительно момента излучения зондирующего сигнала, и по нему в электронном блоке для каждого приемника рассчитывается линия возможного местоположения цели в охраняемой зоне. Область пересечения линий, рассчитанных для приемников, обнаруживших цель, соответствует местоположению цели в зоне охраны, и эта область выводится на индикатор обзора.
Последовательная обработка сигналов позволяет определить курс и скорость движения подводной цели.
Рассмотренный вариант практического воплощения предложенного метода достаточно прост в изготовлении и мал по стоимости по сравнению с решением задачи по обнаружению подводной цели и определению ее местоположения традиционными методами активной гидролокации. Действительно, ни излучатель, ни приемники в предлагаемом методе не требуют применения сложных и дорогостоящих многолучевых устройств или устройств управления лучом, при этом зону контроля можно расширять путем увеличения сектора облучения и наращивания числа относительно простых приемников или излучателей и приемников вместо наращивания числа дорогостоящих многолучевых традиционных гидролокаторов.
Каждый из признаков, включенных в формулу изобретения, необходим, а все вместе они достаточны для достижения поставленной цели, то есть в формулу изобретения включены существенные признаки.
Предпосылкой возможности осуществления данного метода являются известные физические процессы, сопровождающие распространение в водной среде ультразвуковых колебаний, используемых в активной гидролокации, в частности, их быстрое затухание с расстоянием, поэтому для обнаружения целей в воде в условиях помех важно, чтобы приемник отраженных от целей зондирующих сигналов, обычно существенно более слабых по сравнению с воздействующими на цель зондирующими сигналами, находился на возможно близком расстоянии от цели для уверенной регистрации отраженных от нее сигналов.
Действительно, как следует из известных данных (см. В.Н.Тюлин. Основные явления, связанные с распространением акустических волн в морской среде. В.-М. Акад. Корабл. им. А.Н.Крылова, Л. 1956), спад с расстоянием интенсивности зондирующего сигнала, даже без учета его рассеяния при отражении от цели и поглощения энергии звука при распространении в воде, происходит пропорционально четвертой степени расстояния до цели, в то время как снижение энергии каждого из сигналов - падающего на цель зондирующего сигнала и отраженного от цели сигнала - происходит пропорционально второй степени расстояния до цели. Поэтому вынесение приемников в зону вероятного появления цели позволяет регистрировать существенно более высокие уровни отраженных сигналов от цели или, что эквивалентно, обнаруживать цель за пределами максимальных расстояний, доступных традиционным методам гидролокации, при которых излучатель зондирующих сигналов и приемник отраженных от цели зондирующих сигналов совмещены.
Кроме того, простая конструкция приемников и излучателя позволяет выполнять их с узкой шириной диаграммы направленности в вертикальной плоскости за счет простого развития размера их антенн по вертикали, тем самым уменьшая излучение и восприятие реверберационных помех на частоте зондирующего сигнала, что особенно критично для мелководных областей.
Сущность заявленного метода и системы поясняется чертежами:
фиг.1 - структурная схема системы по предлагаемому методу;
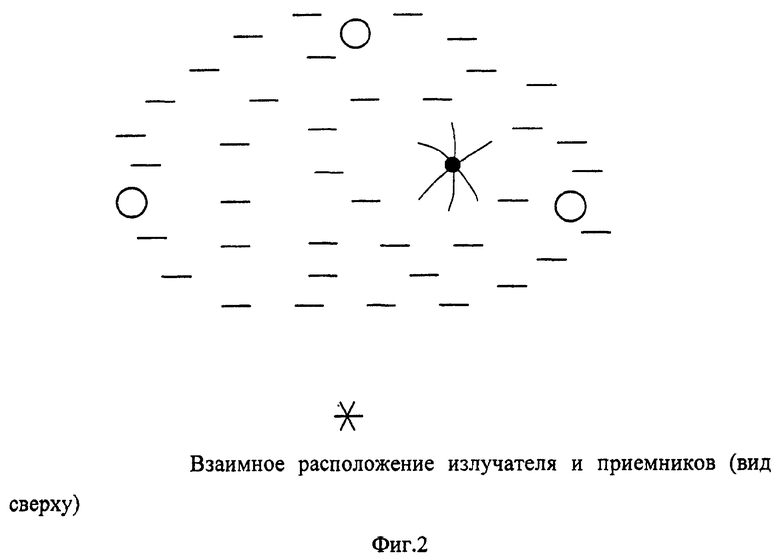
фиг.2 - взаимное расположение излучателя и приемников;
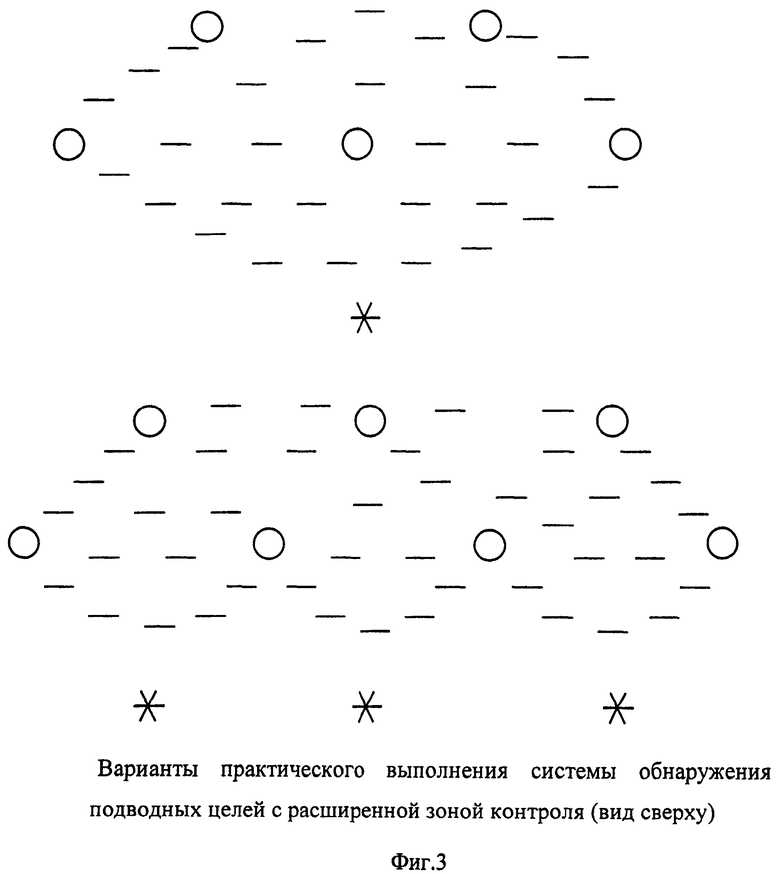
фиг.3 - варианты практического выполнения системы обнаружения подводных целей с расширенной зоной контроля.
В основе предлагаемого метода лежит пространственное отнесение от излучателя, зондирующего контролируемое водное пространство, приемников, регистрирующих отраженные от целей сигналы, в зону вероятного появления целей, то есть на более близкое от целей расстояние по сравнению с расстояниями от излучателя до целей, при этом местоположение обнаруженной цели определяется с использованием компьютерного моделирования по временам прихода на приемники отраженного от обнаруженной цели зондирующего сигнала, отсчитываемым от момента излучения зондирующего сигнала, с учетом скорости звука в воде и известного положения излучателя и приемников.
При осуществлении предлагаемого метода предпочтительным является использование излучателя зондирующих сигналов с узкой шириной диаграммы направленности излучаемого сигнала в вертикальной плоскости для снижения образования реверберационных помех из-за отражений излучаемого сигнала от водной поверхности и дна, и предметов на дне, что особенно критично для мелководных областей. При этом излучение в горизонтальной плоскости организуется в широком секторе для озвучивания сразу всей контролируемой зоны. Предпочтительно также, чтобы и приемники имели узкую ширину диаграммы направленности в вертикальной плоскости для снижения принимаемых реверберационных помех.
Определение местоположения обнаруженной подводной цели в контролируемой зоне проводится с использованием не менее трех приемников для исключения неопределенности в определении положения цели по временам прихода на приемники отраженного от цели зондирующего сигнала.
При оценке необходимой погрешности определения местоположения обнаруженной подводной цели необходимо исходить из того, что она определяется как наибольшая из двух величин: погрешность определения местоположения приемников на дне при их установке и погрешность определения времени прихода сигналов на приемники Δt, связанная с погрешностью по расстоянию через скорость звука в воде С:
Δr=C·Δt.
Из этих двух погрешностей наименьшей является та, которая определяется временем прихода сигналов на приемники. В случае обычно применяемых корреляционных методов приема отраженных от целей сигналов, в которых принимаемые сигналы согласуются с излучаемым сигналом для выделения сигналов из помех, она имеет порядок 0,1 мс, что эквивалентно погрешности по расстоянию 0,15 м, а наибольшей является погрешность определения координат приемников, которая составляет не менее 1-2 м, чем и определяется общая погрешность системы.
Предложенные метод и система осуществляются в соответствии со структурной схемой системы, приведенной на фиг.1. Она включает следующие элементы:
1 - излучатель зондирующих сигналов;
2, 3, 4 - приемники отраженных от цели зондирующих сигналов;
5 - электронный комплекс обработки данных.
В соответствии с этой схемой в зоне наблюдений в воде устанавливают излучатель 1 зондирующих сигналов и приемники 2, 3, 4 отраженных от подводной цели зондирующих сигналов, которые соединяются с электронным комплексом обработки данных 5. Электронный комплекс обработки данных может состоять из ряда соединенных между собой электронных блоков излучения, приема, обработки, передачи и представления данных на индикаторе обзора охраняемой зоны.
Пространственно разнесенные друг от друга и от излучателя приемники 2, 3, 4 располагают в контролируемой зоне и для каждого из них при установке определяют координаты их местоположения. Приемники осуществляют прием отраженных от подводных целей зондирующих сигналов с передачей данных в электронный комплекс обработки данных 5, где организуется сигнализация о несанкционированном появлении цели-нарушителя в контролируемой зоне и решается задача определения местоположения обнаруженной цели путем сопоставления момента излучения и времен прихода на приемники отраженных от цели зондирующих сигналов.
Взаимное расположение излучателя и приемников показано на фиг.2. Здесь три пространственно разнесенных приемника вместе с излучателем образуют пространственно ограниченную контролируемую зону. Со стороны излучателя зона контроля ограничена границами сектора облучения, а со стороны приемников - областью между приемниками. На фиг.2 зона контроля отмечена штриховкой.
При выборе расстояния, на которое разносятся друг от друга приемники, определяющие размер контролируемой зоны, необходимо исходить из того, что цель должны обнаруживать все три приемника в зоне контроля. Поэтому это должно быть расстояние, не превышающее максимально достижимое расстояние, на котором может быть обнаружена цель. Однако в условиях мелководных областей это расстояние может изменяться в широких пределах. Эти изменения вызываются в основном изменениями погодных условий и сезонными колебаниями температуры воздуха, которые приводят к локальным изменениям скорости звука в воде из-за неравномерного прогрева водного слоя и, в результате, к изменению дальности обнаружения объектов из-за эффектов рефракции звуковых лучей в водном слое и касания ими дна и водной поверхности. Очевидно, приемники должны разноситься с учетом диапазона возможных изменений максимальных расстояний для обеспечения всесезонной и всепогодной работы системы.
Цель в общем случае находится на разных расстояниях от приемников внутри зоны контроля, и поэтому отраженный от нее зондирующий сигнал достигает каждого из них в разное время, что используется в системе для определения местоположения цели относительно приемников и излучателя, местоположение которых известно. Для решения задачи по определению местоположения цели в электронном комплексе обработки данных необходимо построить для каждого приемника, обнаружившего цель, линию возможного местоположения цели, которая представляет отрезок эллипса с фокусами в точках положения излучателя и приемника. Место пересечения линий, построенных для каждого приемника, определяет местоположение цели в контролируемой зоне. На фиг.2 показан пример таких построений для определения точки, где расположена обнаруженная цель.
Поскольку зона действия приемников ограничена сравнительно близкими расстояниями, при организации зоны контроля небольших размеров, например, для контроля входа в порт или в бухту, достаточно использовать три приемника и один излучатель по предлагаемой схеме. Такой минимальный набор элементов достаточен для организации зоны контроля шириной 100-200 м. Расширить зону контроля можно путем наращивания числа этих элементов.
В соответствии с этим на фиг.3 представлено два варианта практического выполнения системы обнаружения подводных целей с расширенной зоной контроля.
В одном из этих вариантов (верхний рисунок на фиг.3) зона контроля расширяется только за счет наращивания числа приемников, в данном примере до пяти приемников, а излучатель используется один, но, соответственно, с расширенным сектором излучения. По существу, это соединение вместе нескольких зон контроля, в данном примере двух, образованных каждая внутри пространства, ограниченного соседними тройками приемников, поскольку должно сохраняться условие, что расчеты по определению местоположения обнаруженных целей должны проводиться независимо для каждой из зон внутри используемых троек приемников.
В другом варианте (нижний рисунок на фиг.3) зона контроля расширяется путем увеличения числа как приемников, так и излучателей.
Техническим результатом настоящего изобретения является осуществление оперативного обнаружения подводной цели в мелководной среде и определение ее местоположения относительно простыми и недорогими средствами.
Изобретение относится к области гидролокации и предназначено для обнаружения подводных целей в прибрежных морских областях, а также в речных руслах, каналах, озерах. Метод обнаружения целей в водной среде и определения их местоположения включает волновое зондирование и прием отраженных от целей зондирующих сигналов, при этом излучение зондирующих сигналов осуществляют из зоны наблюдения, а прием отраженных от подводных целей сигналов ведут на несколько, минимум на три, разнесенных между собой приемников, образующих внутри ограниченного ими пространства зону контроля, с известными координатами, пространственно отнесенных от излучателя и располагаемых в области ожидаемого появления целей, и регистрируют время прихода на приемники отраженных от цели зондирующих сигналов, при этом местоположение цели в зоне контроля определяют с использованием компьютерного моделирования по времени прихода на приемники отраженного от цели зондирующего сигнала, отсчитываемого относительно момента излучения, с учетом скорости звука в воде и известного положения излучателя и приемников. Технический результат: осуществление оперативного обнаружения подводной цели в мелководной среде и определение ее местоположения относительно простыми и недорогими средствами. 5 з.п. ф-лы, 3 ил.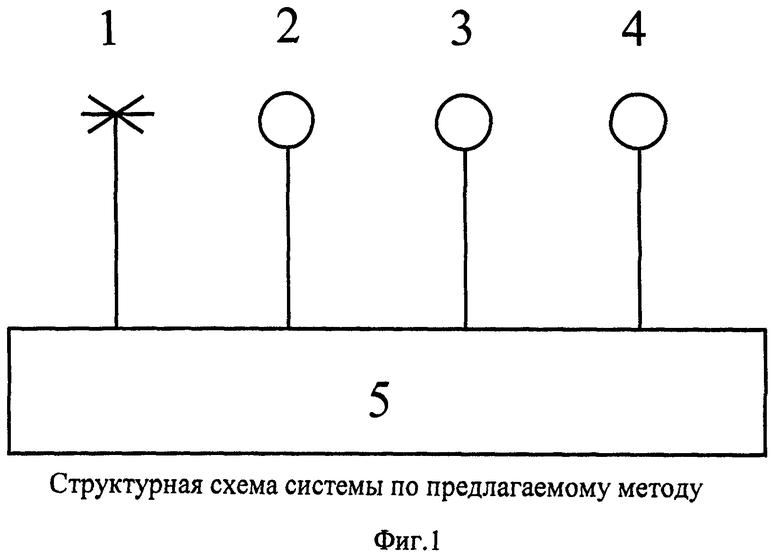
1. Метод обнаружения целей в водной среде и определения их местоположения, включающий волновое зондирование и прием отраженных от целей зондирующих сигналов, отличающийся тем, что излучение зондирующих сигналов осуществляют из зоны наблюдения, а прием отраженных от подводных целей сигналов ведут на несколько, минимум на три, разнесенных между собой приемников, образующих внутри ограниченного ими пространства зону контроля, с известными координатами, пространственно отнесенных от излучателя и располагаемых в области ожидаемого появления целей, и регистрируют время прихода на приемники отраженных от цели зондирующих сигналов, при этом местоположение цели в зоне контроля определяют с использованием компьютерного моделирования по времени прихода на приемники отраженного от цели зондирующего сигнала, отсчитываемого относительно момента излучения, с учетом скорости звука в воде и известного положения излучателя и приемников.
2. Система для осуществления метода по п.1, содержащая излучатель зондирующих сигналов в водной среде и приемники отраженных от объекта зондирующих сигналов, которые соединяют с электронным комплексом обработки данных.
3. Система по п.2, отличающаяся тем, что электронный комплекс обработки данных состоит из ряда соединенных между собой электронных блоков излучения, приема, обработки, передачи и представления данных.
4. Система по п.2, отличающаяся тем, что зона контроля расширяется за счет наращивания числа приемников или излучателей и приемников.
5. Система по п.2, отличающаяся тем, что антенна излучателя выполнена с характеристикой направленности в горизонтальной плоскости, ограниченной сектором облучения охраняемой зоны между приемниками, а антенны приемников - с круговой характеристикой направленности в горизонтальной плоскости.
6. Система по п.2, отличающаяся тем, что излучатель и приемники отраженных от целей сигналов имеют узкую ширину диаграммы направленности в вертикальной плоскости.
| RU 2007106983 А, 10.09.2008 | |||
| ПРИЕМНЫЙ ТРАКТ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ С ЛИНЕЙНОЙ АНТЕННОЙ, УСТРАНЯЮЩИЙ НЕОДНОЗНАЧНОСТЬ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА СИГНАЛА | 2000 |
|
RU2190237C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| JP 2001330659 А, 30.11.2001 | |||
| JP 62288586 А, 15.12.1987. | |||

