Изобретение относится к области гидролокации и предназначено для обнаружения подводных целей в областях, удаленных на значительные расстояния от места наблюдения, в сложных условиях распространения звука для реальных акваторий.
Предложенная система гидролокации может быть использована при проведении подводных работ, охране объектов со стороны водной среды на дальних подступах и подводных сооружений, таких как проложенные под водой кабели, коллекторы, трубопроводы, для охраны судов на якорной стоянке, морских нефтяных платформ, входов в порты, акваторий гидро- и атомных станций, пирсов, верфей, гаваней, для контроля подводной обстановки.
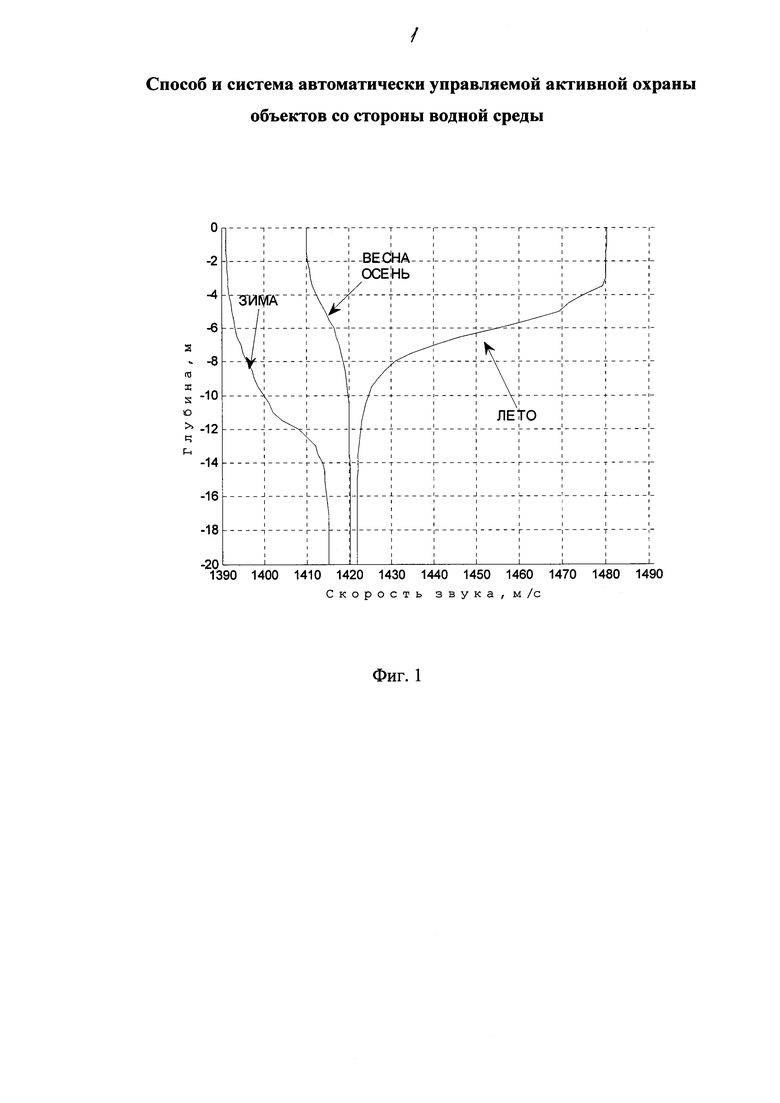
Недостатком известных методов гидролокации для этих целей в реальных акваториях являются ограничения по обнаружению целей из-за отклонения (рефракции) звуковых лучей в вертикальной плоскости от прямолинейного распространения, вызванные неравномерным прогревом водной толщи и связанным с этим распределением скорости звука по глубине, разным по погодным условиям и сезонам [1], Примеры экспериментально наблюдаемых типичных по сезонам распределений показаны на фиг. 1. При этом, в зависимости от положения приемоизлучающей антенны гидролокатора по глубине, на разных расстояниях возникают зоны, не охваченные облучением, так называемые «зоны тени», при попадании в которые цель не будет обнаруживаться.
Так, летом при положении излучателя по глубине, соответствующим области отрицательного градиента скорости звука по глубине, вышедшие в близком к горизонтальному направлению звуковые лучи сразу отклоняются вниз в сторону дна, при этом образуется «зона тени» в приповерхностной области, где цель не обнаруживается, поскольку в этой области энергия зондирующих сигналов оказывается ничтожно малой уже на сравнительно близких расстояниях от излучателя.
Общий характер лучевых картин с резким отклонением звуковых лучей от горизонтального направления вниз или вверх с образованием «зон тени» будет наблюдаться не только летом, но и в другие сезоны, а также при резких изменениях погоды в зоне наблюдений и при изменении положения излучателя по глубине.
Задача, на решение которой направлено предложенное изобретение, заключается в создании способа и устройства на его основе с простой реализацией и расширенной областью применения, позволяющих в значительной степени автоматически компенсировать отрицательное влияние рефракции на дальность обнаружения целей гидролокатором в сложных условиях реальных акваторий с изменчивыми условиями распространения звука.
Для решения поставленной задачи предложен способ автоматически управляемой активной охраны объектов со стороны водной среды на основе гидролокации с увеличенной дальностью обнаружения целей, включающий продольное зондирование водной толщи и прием отраженных от цели зондирующих сигналов, в котором обнаружение целей в задаваемой зоне или увеличение дальности их обнаружения достигается за счет автоматически управляемого установления приемоизлучающей антенны гидролокатора по глубине и по углу наклона излучения и приема, рассчитанных по данным измеренного вертикального распределения скорости звука в водном слое.
Необходимо сразу отметить, что изменение положения антенны гидролокатора по глубине и по углу наклона излучения и приема относительно горизонтального направления может выполняться как простым поворотом угла наклона излучающей и приемной поверхности антенны, так и более характерным для современных приемоизлучающих антенн, выполняемых в виде фазированных антенных решеток пьезоэлементов, изменением угла характеристики направленности излучения и приема относительно горизонтального направления путем электронного сканирования элементов.
Соответственно система для осуществления предложенного способа состоит из соединенных между собой измерителя распределения скорости звука по глубине в зоне установки гидролокатора, электронного блока расчета параметров положения антенны по глубине и по углу наклона излучения и приема относительно горизонтального направления и блока дистанционного установления положения антенны гидролокатора.
Предложенный способ позволяет в значительной степени компенсировать влияние рефракции звуковых лучей, вызванной распределением скорости звука по глубине, изменчивым во времени. Для этого излучение зондирующих сигналов и прием отраженных от целей зондирующих сигналов ведут на заранее рассчитанной определенной глубине и под углом к горизонтальному направлению в сторону водной поверхности или в сторону дна в зависимости от нахождения излучателя соответственно в области отрицательного или положительного градиента скорости звука в водном слое. При этом формируется зона озвучивания со значительной протяженностью в горизонтальном направлении от места излучения. Решение обратной задачи по выбору положения антенны по глубине и по углу наклона излучения и приема относительно горизонтального направления для измеренного вертикального распределения скорости звука в области установки антенны гидролокатора ведется расчетным путем методом компьютерного моделирования по данным измерений вертикального распределения скорости звука и необходимости обнаружения подводных целей в водной толще в задаваемой зоне или на максимальных горизонтальных расстояниях от места излучения.
Предлагаемая система гидролокации предназначена для контроля зоны, расположенной на значительном удалении от места излучения путем частичной компенсации влияния распределения скорости звука по глубине на дальность облучения за счет автоматически управляемого установления приемоизлучающей антенны гидролокатора по глубине и по углу наклона излучения и приема, рассчитываемых на основе измеренного вертикального распределения скорости звука в водном слое. При этом местоположение обнаруженной цели определяется, как и при обычной гидролокации, методом компьютерного моделирования по временам прихода отраженных от цели зондирующих сигналов относительно момента излучения с учетом скорости звука в воде и известного положения приемоизлучающей антенны гидролокатора.
Практическое воплощения предложенного способа достаточно просто в изготовлении и невелико по стоимости, поскольку обнаружение подводных целей в водной толще в задаваемой зоне или на максимальных горизонтальных расстояниях от места излучения достигается лишь помещением приемоизлучающей антенны гидролокатора на определенную глубину и установлением определенного угла наклона ее излучения и приема, а также включением в систему измерителя вертикального распределения скорости звука в акватории для получения необходимых исходных данных для расчета хода звуковых лучей и задания положения антенны в водном слое.
Каждый из признаков, включенных в формулу изобретения, необходим, а все вместе они достаточны для достижения поставленной цели, то есть в формулу изобретения включены существенные признаки.
В основе предлагаемого способа и системы на его основе лежит возможность обнаружения целей в сложных условиях реальных акваторий с изменчивыми условиями распространения звука из-за отклонения (рефракции) звуковых лучей в вертикальной плоскости от прямолинейного распространения, вызванных неравномерным прогревом водной толщи и связанным с этим распределением скорости звука по глубине, разным по погодным условиям и сезонам.
Предпосылкой возможности осуществления предложенного способа являются рассмотренные выше физические процессы, сопровождающие распространение звука в водной среде, используемые в способе. При этом заявленная возможность обнаружения подводных целей в водной толще в задаваемой зоне или на максимальных горизонтальных расстояниях от места излучения осуществляется за счет автоматически управляемого установления положения антенны гидролокатора по глубине и по углу наклона излучения и приема относительно горизонтального направления, рассчитанных по данным измеренного вертикального распределения скорости звука в водном слое.
Предложенный способ и система автоматически управляемой активной охраны объектов со стороны водной среды теоретически и экспериментально обоснованы.
Рассмотрим в качестве примера ход звуковых лучей на одном из участков отрицательного градиента вертикального распределения скорости звука для экспериментально наблюдаемых на фиг. 1 летних условий в интервале глубин 3,5-8 м, характеризующимся примерно линейным законом изменения скорости звука по вертикали с перепадом значений скорости звука от 1480 м/с на глубине 3,5 м до 1431 м/с на глубине 8 м, что дает для их отношения, являющегося показателем преломления лучей на выбранном участке, значение n=0,967.
Используем для выбранного участка отрицательного градиента вертикального распределения скорости звука закон Снеллиуса, связывающий через показатель преломления два угла - угол выхода луча из излучателя φ(z1) на глубине нижней границы участка z1 и угол скольжения луча φ(z) в любой точке участка на глубине z
n(z)=cos φ(z1)/cos φ(z).
Далее, считая условием получения максимальной дальности обнаружения цели в указанном участке водного слоя обращение в ноль угла скольжения луча φ(z) на глубине верхней границы участка, получим соотношение для задания необходимого угла выхода луча из излучателя на глубине z1
cos φ(z1)=0,967.
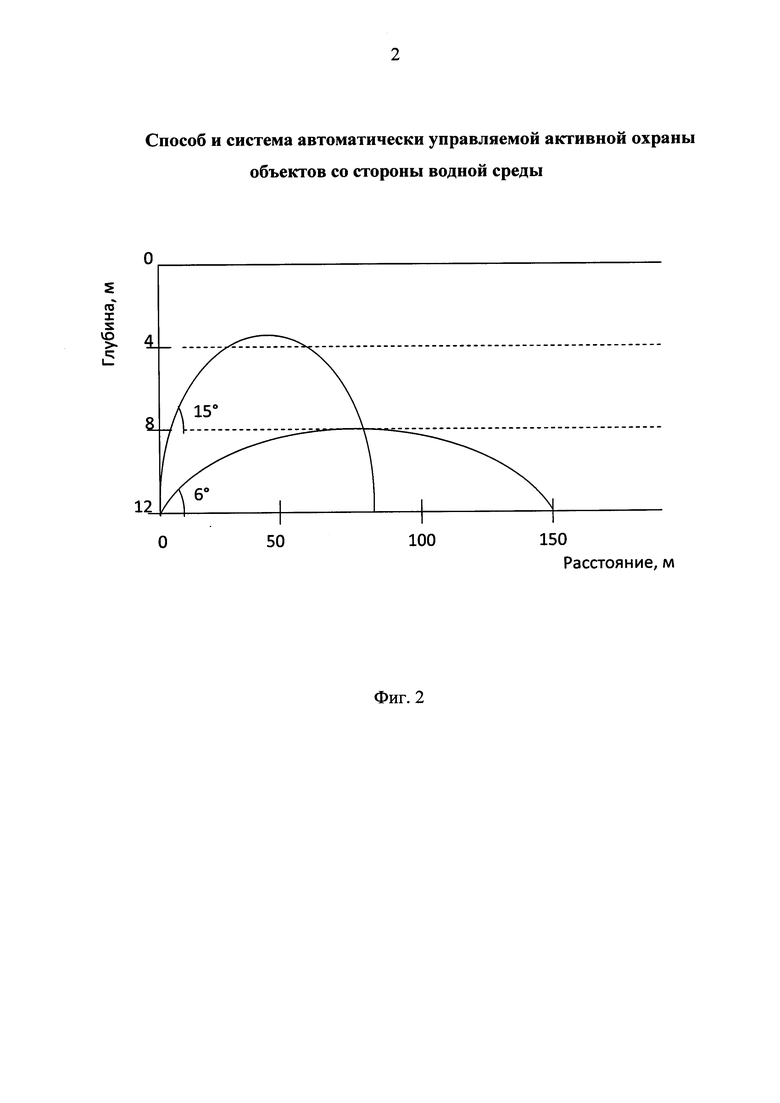
Получим необходимое для угла выхода луча из излучателя на глубине z1 значение около 15°, при котором луч за счет компенсации отрицательного влияния рефракции уже не будет отклоняться сразу вниз в сторону дна после выхода из излучателя, а будет направляться в сторону водной поверхности и проходить в пределах участка до точки заворота на глубине верхней границы участка и далее на выход из нижней границы участка. В результате облучение и, следовательно, обнаружение подводных целей в водной толще в пределах выбранного участка отрицательного градиента вертикального распределения скорости звука будет проходить на максимальных горизонтальных расстояниях от места излучения.
Для оценки получаемого увеличения дальности облучения воспользуемся приводимой в [1] формулой расчета расстояния по горизонтали, проходимого звуковым лучом в области отрицательного градиента скорости звука
r=2 tg φ(z1)/а,
где а - коэффициент, характеризующий используемый линейный закон изменения скорости звука c(z) по вертикали на участке отрицательного градиента вертикального распределения скорости звука
c(z)=c(z1)·(1-а·(z-z1)).
Используя для рассматриваемого участка значение а=0,00736 м-1 и φ(z1)=15°, получим максимальную дальность озвучивания r по горизонтали примерно 73 м в пределах выбранного участка отрицательного градиента вертикального распределения скорости звука.
При помещении антенны гидролокатора на большие глубины чем 8 м необходимо учесть в расчетах угла выхода луча из излучателя влияние на траекторию луча более широкой области вертикального распределения скорости звука по толщине водного слоя. Рассмотрим в связи с этим другой участок отрицательного градиента вертикального распределения скорости звука на фиг. 1 в интервале глубин 8-12 м, примыкающий к первому участку, характеризующийся линейным перепадом значений скорости звука от 1431 м/с на глубине 8 м до 1423 м/с на глубине 12 м, что дает для их отношения, являющегося показателем преломления лучей для выбранного участка, значение n=0,9944. При выходе луча из излучателя на глубине нижней границы этого участка выход на ранее рассчитанную траекторию луча в пределах первого участка будет обеспечиваться при угле выхода 16°, а максимальная дальность озвучивания по горизонтали r=150 м в пределах второго участка будет обеспечиваться при угле выхода 6°.
В соответствии с проведенными расчетами на фиг. 2 представлены для летнего сезона траектории хода звуковых лучей в пределах выбранных участков отрицательного градиента скорости звука, вышедших на глубинах 8 м и 12 м под необходимыми углами в сторону водной поверхности для получения максимальных дальностей озвучивания по горизонтали.
В рассмотренных примерах при необходимости обеспечения облучения подводной цели в водной толще на больших горизонтальных расстояниях необходимо помещать антенну гидролокатора на большие глубины, в том числе вне пределов рассмотренных участков отрицательного градиента скорости звука, и учитывать в расчетах влияние на траекторию луча более широкой области вертикального распределения скорости звука по толщине водного слоя. С этой точки зрения на практике целесообразно непрерывно выполнять расчеты траекторий звуковых лучей, аналогичные изложенным, для набора глубин и углов наклона излучения и приема антенны гидролокатора методом компьютерного моделирования по измеренным текущим данным вертикального распределения скорости звука.
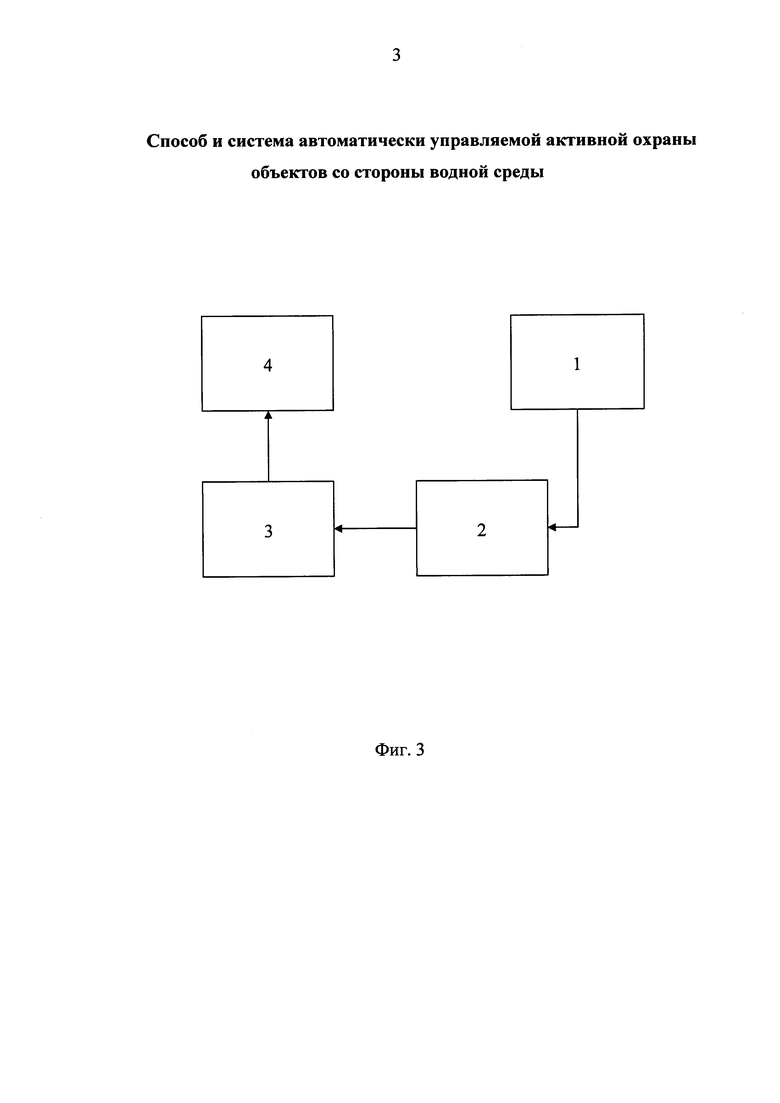
Предложенные способ и система автоматически управляемой активной охраны объектов осуществляются в соответствии с показанной на фиг. 3 структурной схемой установления приемоизлучающей антенны гидролокатора по глубине и по углу ее излучения и приема относительно горизонтального направления, которая включает следующие элементы:
1 - измеритель распределения скорости звука по глубине;
2 - электронный блок расчета траекторий звуковых лучей по измеренным данным распределения скорости звука по глубине и по пространственному положению антенны по глубине и углу наклона ее излучения и приема;
3 - блок дистанционного установления антенны гидролокатора по глубине и наклону излучения и приема относительно горизонтального направления в соответствии с заданными условиями облучения подводных целей в водной толще;
4 - антенна гидролокатора.
В соответствии с этой структурой алгоритм управления пространственным положением антенны гидролокатора 4 включает следующую последовательность операций:
- измерителем 1 выполняются непрерывные текущие измерения вертикального распределения скорости звука в водном слое в зоне установки антенны гидролокатора;
- по полученным в результате измерений данным вертикального распределения скорости звука в электронном блоке 2 проводится расчет необходимых параметров положения антенны гидролокатора по глубине и по углу наклона ее излучения и приема методом компьютерного моделирования для условий облучения подводных целей в водной толще в заданных зонах или на максимальных горизонтальных расстояниях от места излучения;
- рассчитанные параметры положения антенны вносятся на исполнение в блок 3 дистанционного управления положением антенны;
- блок 3 устанавливает положение антенны 4 по глубине и наклону ее излучения и приема.
Техническим результатом настоящего изобретения является увеличение дальности обнаружения целей в сложных условиях реальных акваторий.
Литература
1. Волны в слоистых средах. Л.М. Бреховских. Изд. АН СССР, М., 1957, с. 421-422, 448-449.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАБЛЮДАЕМОГО ОБЪЕКТА ПО ГЛУБИНЕ В ВОДНОЙ СРЕДЕ | 2007 |
|
RU2343502C2 |
| СПОСОБ ПОДГОТОВКИ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2011 |
|
RU2464205C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПРИ ГИДРОЛОКАЦИИ | 2007 |
|
RU2358289C1 |
| МЕТОД И СИСТЕМА ОБНАРУЖЕНИЯ ЦЕЛЕЙ ПРИ ГИДРОЛОКАЦИИ | 2008 |
|
RU2383899C1 |
| СИСТЕМА ГИДРОЛОКАЦИИ ЦЕЛЕЙ В УСЛОВИЯХ МЕЛКОВОДЬЯ | 2011 |
|
RU2461844C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2014 |
|
RU2558017C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2009 |
|
RU2410721C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА | 2011 |
|
RU2472178C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СИСТЕМА ПАРАМЕТРИЧЕСКОЙ ГИДРОЛОКАЦИИ С ФУНКЦИЕЙ ПОЛУЧЕНИЯ АКУСТИЧЕСКОГО ИЗОБРАЖЕНИЯ ЦЕЛЕЙ | 2012 |
|
RU2488845C1 |
Изобретение относится к области гидролокации и предназначено для обнаружения подводных целей в областях, удаленных на значительные расстояния от места наблюдения. Предложенный способ автоматически управляемой активной охраны объектов со стороны водной среды с увеличенной дальностью обнаружения целей включает продольное зондирование водной толщи и прием отраженных от цели зондирующих сигналов, при этом увеличение дальности обнаружения целей осуществляется за счет автоматически управляемого установления положения приемоизлучающей антенны гидролокатора по глубине и по углу наклона ее излучения и приема относительно горизонтального направления по данным вертикального распределения скорости звука в водном слое, которые получают с помощью измерителя (1). По ним в блоке (2) рассчитываются глубина и угол наклона излучения и приема антенны, необходимые для обнаружения подводных целей в водной толще в заданной зоне или на максимальных расстояниях от места излучения. Полученные в результате расчета значения указанных параметров антенны вносятся на исполнение в блок (3), который устанавливает положение приемоизлучающей антенны (4) по глубине и по наклону ее излучения и приема. При этом, как и в обычной гидролокации, определение местоположения обнаруженных целей и параметров их движения в пределах сектора облучения осуществляется по временам прихода отраженных от цели зондирующих сигналов относительно момента излучения зондирующего сигнала с учетом скорости звука в воде и известного положения гидролокатора. Техническим результатом настоящего изобретения является увеличение дальности обнаружения целей в сложных условиях реальных акваторий. 2 н.п. ф-лы, 3 ил.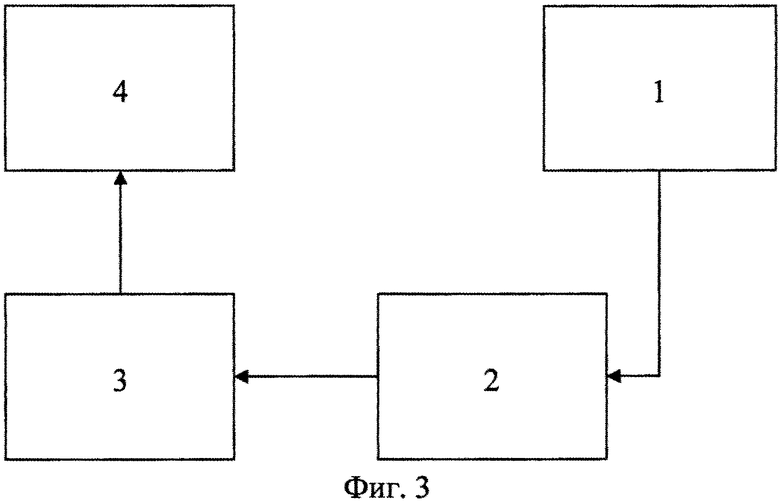
1. Способ автоматически управляемой активной охраны объектов со стороны водной среды на основе гидролокации с увеличенной дальностью обнаружения целей, включающий продольное зондирование водной толщи и прием отраженных от цели зондирующих сигналов, отличающийся тем, что увеличение дальности обнаружения целей достигается за счет автоматически управляемого установления приемоизлучающей антенны гидролокатора по глубине и углу наклона ее излучения и приема, рассчитанных по данным измеренного вертикального распределения скорости звука в водном слое.
2. Система для осуществления способа по п. 1, характеризующаяся тем, что состоит из соединенных между собой измерителя распределения скорости звука по глубине в зоне установки антенны гидролокатора, электронного блока расчета необходимых параметров положения антенны гидролокатора по глубине и по углу наклона ее излучения и приема по измеренным данным распределения скорости звука по глубине и блока дистанционного установления приемоизлучающей антенны гидролокатора по глубине и углу наклона ее излучения и приема относительно горизонтального направления для рассчитанных условий облучения подводных целей в водной толще.
3. Система по п. 2, отличающаяся тем, что определение параметров приемоизлучающей антенны гидролокатора по глубине и по углу наклона ее излучения и приема в электронном блоке расчета траекторий звуковых лучей осуществляется методом компьютерного моделирования по данным измерений вертикального распределения скорости звука и условий обнаружения подводных целей в водной толще в заданных зонах или на максимальных горизонтальных расстояниях от места излучения.
| Устройство для определения процентного соотношения минералов, содержащихся в горных породах | 1954 |
|
SU104732A1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАБЛЮДАЕМОГО ОБЪЕКТА ПО ГЛУБИНЕ В ВОДНОЙ СРЕДЕ | 2007 |
|
RU2343502C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2010 |
|
RU2421755C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПРИ ГИДРОЛОКАЦИИ | 2007 |
|
RU2358289C1 |
| JP2001330659 A, 30.11.2001.. | |||

