Заявляемое изобретение относится к способам автоматического управления полетом вертолета, в частности, к способам автоматического управления угловым положением вертолета по крену и тангажу, использующим комбинированную систему управления КСУ, содержащую систему дистанционного управления СДУ и систему автоматического управления САУ.
Известны способы автоматического управления угловым положением вертолета, описанные, в частности, в патентах: RU 2150137 С1, 27.05.2000; RU 2204504 С1, 20.05.2003; RU 2220073 С1, 27.12.2003; US 6128554А от 03.10.2000; RU 2282562 С1, 27.08.2006; US 6128554 А, 03.10.2000 и в книге С.М.Федорова и др. Автоматизированное управление полетом воздушных судов. - М.: Транспорт, 1992, с.228, 229, 236, рис.12.2, 12.5, 12.10.
К недостаткам известных способов автоматического управления угловым положением вертолета следует отнести тот факт, что они не обеспечивают важнейших характеристик управляемости: устойчивости по скорости вертолета, постоянства градиентов и  и
и  управления по крену и тангажу, а также максимальных располагаемых значений углов крена и тангажа в зависимости от скорости полета.
управления по крену и тангажу, а также максимальных располагаемых значений углов крена и тангажа в зависимости от скорости полета.
Наиболее близким по технической сущности к заявляемому является способ автоматического управления угловым положением вертолета, в частности по крену, представленный в книге С.М.Федорова и др. Автоматизированное управление полетом воздушных судов. - М.: Транспорт, 1992, с.236, рис.12.10.
Однако данному способу автоматического управления угловым положением вертолета присущи недостатки, описанные выше, не позволяющие обеспечить важнейших характеристик управляемости, а именно устойчивости по скорости вертолета, постоянства градиентов управления  и
и  и максимальных располагаемых значений углов крена и тангажа во всем диапазоне изменения скоростей полета.
и максимальных располагаемых значений углов крена и тангажа во всем диапазоне изменения скоростей полета.
Целью изобретения является устранение указанных недостатков и обеспечение устойчивости по скорости вертолета, а также постоянства градиентов управления  и и максимальных значений углов крена и тангажа вертолета во всем диапазоне изменения скоростей полета.
и и максимальных значений углов крена и тангажа вертолета во всем диапазоне изменения скоростей полета.
Поставленная цель достигается за счет того, что согласно предлагаемому способу автоматического управления угловым положением вертолета с применением комбинированной системы управления, содержащей систему дистанционного управления и систему автоматического управления, заключающийся в том, что в качестве сигналов управления используют сигналы системы дистанционного управления и системы автоматического управления, причем сигнал системы дистанционного управления формируют в виде первого суммарного сигнала на основе сигнала, соответствующего перемещению ручки управления, и сигнала, соответствующего угловой скорости вертолета по крену или тангажу, и подают его на первый вход привода органов управления вертолета, а для получения управляющего сигнала системы автоматического управления сначала формируют второй суммарный сигнал на основе сигнала, соответствующего текущему значению перемещения ручки управления, и сигнала, соответствующего перемещению ручки управления в момент включения режима «ручка-угол», взятого с противоположным знаком, затем на основе второго суммарного сигнала и сигнала, соответствующего угловому положению вертолета по крену или тангажу, формируют третий суммарный сигнал, интегрируют его и на основе третьего суммарного сигнала и сигнала, полученного после интегрирования, формируют четвертый суммарный сигнал, который динамически ограничивают посредством интегрирующего устройства и нелинейного элемента с зоной нечувствительности и ограничением, причем, если величина четвертого суммарного сигнала по абсолютной величине больше зоны ограничения, на каждом шаге интегрирования на выходе интегрирующего устройства посредством электронного автотриммера выставляют начальные условия, ограничивающие величину управляющего сигнала системы автоматического управления, динамически ограниченный четвертый суммарный сигнал суммируют с выходным сигналом автотриммера и со вторым суммарным сигналом, взятым с противоположным знаком, полученный пятый суммарный сигнал ограничивают и подают его на второй вход привода.
Сущность изобретения поясняется чертежом, на котором представлена блок-схема системы, реализующей заявляемый способ автоматического управления угловым положением вертолета.
Система содержит датчик 1 угла (крена γ или тангажа ϑ), датчик 2 положения ручки управления, датчик 3 угловой скорости (ωγ или ωυ), первый сумматор 4, привод 5, второй сумматор 6, третий сумматор 7, четвертый сумматор 8, пятый сумматор 9, ограничитель 10, интегрирующее устройство 11, нелинейный элемент 12 с зоной нечувствительности и ограничением, электронный автотриммер 13 и запоминающее устройство 14.
При воздействии летчика на ручку управления на выходе датчика 2 положения ручки управления формируется сигнал Хр, поступающий на первый вход первого сумматора 4, на второй вход которого поступает демпфирующий сигнал с датчика 3 угловой скорости (ωγ или ωυ). Суммарный сигнал с выхода первого сумматора 4, являющийся управляющим сигналом системы дистанционного управления СДУ, подают на первый вход привода 5. Сигнал с датчика 2 положения ручки подают также в систему автоматического управления САУ, а именно на первый вход второго сумматора 6 и через запоминающее устройство 14, фиксирующее значение данного сигнала в момент включения режима «ручка-угол», на второй, инвертирующий вход данного сумматора.
Сигнал с выхода второго сумматора 6 подают на второй вход третьего сумматора 7, на первый вход которого поступает сигнал с датчика 1 угла (γ или  ). Сигнал с выхода третьего сумматора 7 подают на первый вход четвертого сумматора 8 и через интегрирующее устройство 11 - на второй вход четвертого сумматора 8. Принимая во внимание, что КСУ состоит из высоконадежной, например, четырехкратно резервированной, СДУ и менее надежной, например, дублированной САУ, для обеспечения отказобезопасности управляющий сигнал с четвертого сумматора 8 динамически ограничивают с использованием нелинейного элемента 12 с зоной нечувствительности и ограничением, вход которого соединен с выходом четвертого сумматора 8, а выход со вторым входом интегрирующего устройства 11.
). Сигнал с выхода третьего сумматора 7 подают на первый вход четвертого сумматора 8 и через интегрирующее устройство 11 - на второй вход четвертого сумматора 8. Принимая во внимание, что КСУ состоит из высоконадежной, например, четырехкратно резервированной, СДУ и менее надежной, например, дублированной САУ, для обеспечения отказобезопасности управляющий сигнал с четвертого сумматора 8 динамически ограничивают с использованием нелинейного элемента 12 с зоной нечувствительности и ограничением, вход которого соединен с выходом четвертого сумматора 8, а выход со вторым входом интегрирующего устройства 11.
В случае если величина входного сигнала нелинейного элемента 12 с зоной нечувствительности и ограничением по абсолютной величине больше зоны нечувствительности, на второй вход интегрирующего звена поступает сигнал, по которому на каждом шаге интегрирования на выходе интегрирующего устройства 11 выставляются начальные условия, ограничивающие величину сигнала четвертого сумматора 8. Отметим, что при изменении скорости полета изменяется балансировка органов управления вертолета, которая будет в данной системе осуществляться с использованием интегрирующего устройства 11, при этом при ненулевых балансировочных значениях органов управления в системе величины сигналов, соответствующие максимальным значениям положительных и отрицательных углов, будут не одинаковые. Для устранения данного недостатка в системе используется электронный автотриммер 13, который обнуляет поступающий на его вход сигнал четвертого сумматора 8. Электронный автотриммер может быть реализован, например, в виде интегрирующего устройства с импульсным регулированием скорости. Для того, чтобы электронный автотриммер 13 не влиял на динамические характеристики системы, сигнал по скорости перемещения с первого его выхода подают на третий вход интегрирующего устройства 12. Сигнал со второго выхода, осуществляющий перебалансировку вертолета и обнуление сигнала четвертого сумматора 8, подают на второй вход пятого сумматора 9. На первый вход данного сумматора подают сигнал с четвертого сумматора 8, а на третий, инвертирующий, вход подают сигнал рассогласования между текущим значением датчика 2 положения ручки управления и значением, соответствующим моменту включения режима управления угловым положением вертолета «ручка-угол». Данный сигнал компенсирует дополнительное относительно балансировочного значения перемещение органов управления от отклонения ручки управления в СДУ. Сигнал управления САУ с выхода пятого сумматора 9 через ограничитель 10 подают на второй вход привода и осуществляют автоматическое управление угловыми положениями вертолета.
Для реализации заявляемого способа автоматического управления угловым положением вертолета не требуется специального оборудования. В системе его реализующей могут быть использованы стандартные датчики угловых скоростей, углов и положения ручки управления, выпускаемые промышленностью. Функции вычислителей (сумматоров, интегрирующего устройства и т.д.) могут быть реализованы с помощью БЦВМ.
Как показали результаты моделирования системы КСУ-А для вертолета «АНСАТ», при использовании данного технического решения обеспечивается устойчивость по скорости вертолета, а также постоянство градиентов управления  , и максимальных значений углов крена и тангажа вертолета во всем диапазоне изменения скоростей полета.
, и максимальных значений углов крена и тангажа вертолета во всем диапазоне изменения скоростей полета.
Таким образом, предлагаемый способ автоматического управления угловым положением вертолета реализуем и применим для широкого класса вертолетов, в частности типа «АНСАТ».
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОВЫМ ПОЛОЖЕНИЕМ ВЕРТОЛЕТА | 2008 |
|
RU2385263C1 |
| Система дистанционного управления вертолетом | 2015 |
|
RU2636245C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2380279C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| Способ формирования отказоустойчивой комплексной системы управления (КСУ) и отказоустойчивая КСУ | 2016 |
|
RU2629454C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2372250C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
Заявляемое изобретение относится к способам автоматического управления полетом вертолета по крену и тангажу, использующим комбинированную систему управления КСУ, содержащую систему дистанционного управления СДУ и систему автоматического управления САУ. Сигнал СДУ формируют в виде суммарного сигнала на основе сигнала, соответствующего перемещению ручки управления, и сигнала, соответствующего угловой скорости вертолета по крену или тангажу, и подают его на первый вход привода органов управления угловым положением вертолета. Управляющий сигнал САУ формируют в виде суммарного сигнала на основе сигнала, соответствующего текущему значению перемещения ручки управления, сигнала, соответствующего перемещению ручки управления в момент включения режима «ручка-угол», взятого с противоположным знаком, и сигнала, соответствующего угловому положению вертолета по крену или тангажу. Полученный суммарный сигнал динамически ограничивают посредством интегрирующего устройства, нелинейного элемента с зоной нечувствительности и ограничением и электронного автотриммера. Сформированный управляющий сигнал подают на второй вход привода. Обеспечивается устойчивость по скорости вертолета, а также постоянство градиентов управления , и максимальных значений углов крена и тангажа вертолета во всем диапазоне изменения скоростей полета. 1 ил.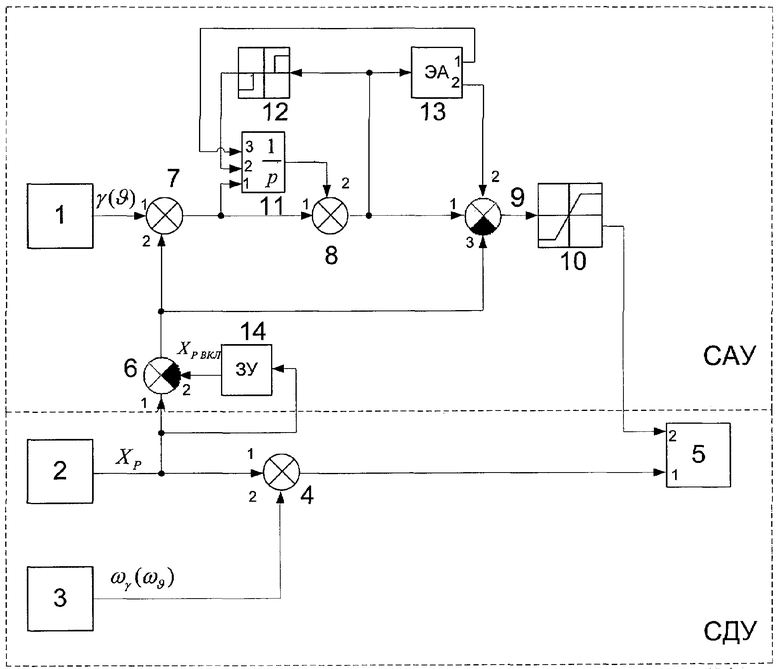
Способ автоматического управления угловым положением вертолета с применением комбинированной системы управления, содержащей систему дистанционного управления и систему автоматического управления, заключающийся в том, что в качестве сигналов управления используют сигналы системы дистанционного управления и системы автоматического управления, причем сигнал системы дистанционного управления формируют в виде первого суммарного сигнала на основе сигнала, соответствующего перемещению ручки управления, и сигнала, соответствующего угловой скорости вертолета по крену или тангажу, и подают его на первый вход привода органов управления вертолета, отличающийся тем, что для получения управляющего сигнала системы автоматического управления сначала формируют второй суммарный сигнал на основе сигнала, соответствующего текущему значению перемещения ручки управления, и сигнала, соответствующего перемещению ручки управления в момент включения режима «ручка - угол», взятого с противоположным знаком, затем на основе второго суммарного сигнала и сигнала, соответствующего угловому положению вертолета по крену или тангажу, формируют третий суммарный сигнал, интегрируют его и на основе третьего суммарного сигнала и сигнала, полученного после интегрирования, формируют четвертый суммарный сигнал, который динамически ограничивают посредством интегрирующего устройства и нелинейного элемента с зоной нечувствительности и ограничением, причем, если величина четвертого суммарного сигнала по абсолютной величине больше зоны ограничения, на каждом шаге интегрирования на выходе интегрирующего устройства посредством электронного автотриммера выставляют начальные условия, ограничивающие величину управляющего сигнала системы автоматического управления, динамически ограниченный четвертый суммарный сигнал суммируют с выходным сигналом автотриммера и со вторым суммарным сигналом, взятым с противоположным знаком, полученный пятый суммарный сигнал ограничивают и подают его на второй вход привода.
| Федоров С.М | |||
| и др | |||
| Автоматизированное управление полетом воздушных судов | |||
| - М.: Транспорт, 1992, стр.228, 229, 236, рис.12.2, 12.5, 12.10 | |||
| Система ориентации и стабилизации | 1981 |
|
SU966669A1 |
| 0 |
|
SU53028A1 | |
| US 4420808 А, 13.12.1983 | |||
| US 6142413 A, 07.11.2000. | |||

