(54) СИСТЕМА ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ ЗЕМЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814305C1 |
| Устройство для управления объектом с присоединенными упругодеформируемыми элементами | 1989 |
|
SU1767476A1 |
| РЕЛЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2033988C1 |
| Система стабилизации объекта с присоединенным упругим элементом переменной жесткости | 1988 |
|
SU1603340A1 |
| Импульсно-релейная система регу-лиРОВАНия | 1979 |
|
SU794614A1 |
| Устройство для активного демпфирования упругих колебаний элементов конструкции вращающегося объекта | 1983 |
|
SU1134927A1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144692C1 |
| Устройство управления динамическим объектом с присоединенным упругим элементом | 1989 |
|
SU1767477A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270790C2 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144691C1 |
,
Изобретение относится к системам управле ния угловым движением подвижного объекта, а именно гастемам ориентации и стабилизации.
Известно .устройство для осушествлеиия ликвидации рассогласюания между заданным значением измеряемого параметра движения и его действительным значением 1.
Однако это устройство является неэкономичным по энергозатратам j на проведение 1фоцесса управления.
Памболее близкой по технической сущности к предлагаемой является система, содержащая датчики угла и угловой скорости, усилительпреобразователь, суммирующий элемент, релейный блок управления исполнительными органами,, блок исполнительных органов и ект : управления. Это устройство осуществляет оптимальное по быстродействию управлеиие ориентацией подвижного объекта (2.
Однако устройство неэкономично по расходу энергии и не может быть использовано при наличии гибких элементов в конструкцни объекта управления из-за значительных воз.мущеиий, возникающих в процессе управления. ;
Цель изобретения - снижение эи вргозатрат иа процесс у1фавлеш1я и расширение области ишользования.
Поставленная цель достигается тем, чю система ориентации и стабилизация, содержащая датчик угла и последовательно соедииеиные блок исполнительных орпшов, объект управления, датчик угловой скорости, усилитель-преобразотатель, первые сумматор и релейный эле мент, причем выход блока исполиительиых орtoганов соединен с вторым входом объекта управления, второй выход которого подключен к входу датчика угла, соедииеиного своимвыходом с вторым входом первого сумматора, дополиительно содержит первый элемеит И
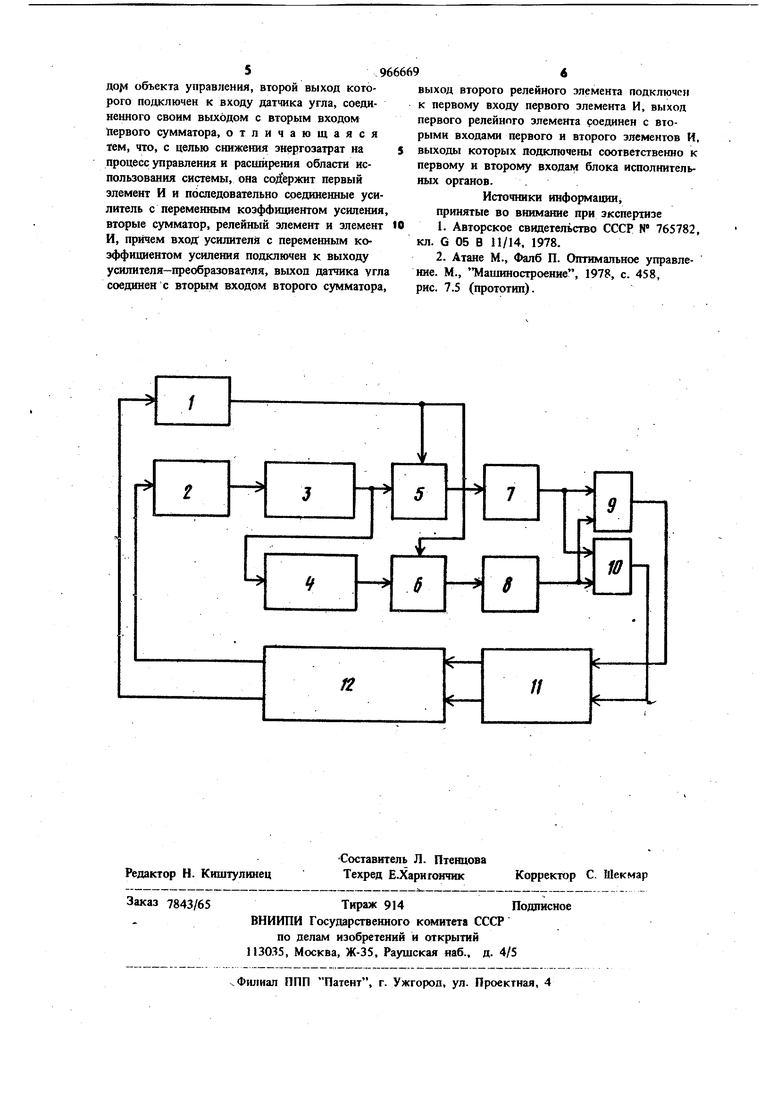
15 и последовательно соединенные уснлитель с переменным коэффициентом усиления, вторые сумматор, релейиый элемент я, элемеш И, причем вход усилителя с переменным коэффициентом усапения подключенгк выходу усилителя-20преобразователя, выход датчика угла соединен с вторым входом второго сумматора, выход второго релейного элемента подключен к первому входу первого элемента И, выход первого релейного элемента соединен с вторыми вх дами первого и второго элементов И, выходы которых подключены схзответственно к первому и второму входам блока иснолнительных органов. На чертеже представлена функциональная схема системы ориентации и стабилизации Система содержит датчик 1 угла, датчик 2 угловой скорости, .уридитель-преобразователь 3, усилитель 4 с переменным коэффициентом усиления, первый и второй сумматоры 5 и 6, первый к второй релейные элементы 7 и 8, первый и второй элементь И 9 и 10, блок 11 исполнительных органов и объект управления 12.. Система ориентации и стабилиэации работае следующим образом. При появлении рассогласования по углу и угловой скорости между заданньпч и реальным положеннем объекта управления 12 на выходе датчиков угла 1 и угловой скорости 2 появляются ненулевые снгнал. Устройство пр этом должно работать по следующей логической схеме и ,5sign w,j(y,,y2)-rt),5 (y,,yj) где и - величина, определяющая полярность управляющего момента, прикладываемого к объекту управления; fl. W о sign ( ои |о, uu) О И . О Vyny.) y,.( и,,(, f линии переключения управляющих воздействий; 1 - рассогласование между заданным зна чением угла и действительным положением объекта управления; . yj - аналогичное рассогласование по угло вой скорости; V - абсолютная величина управляющего момента, прикладываемого к объект управления; (J - некоторый положительный коэффициент, величина которого не может быть меньше 1. Функция u) формируется с помощью усилителя-преобразователя 3 и первого сумматора 5, а функция ш р, формируется с помощью усилителя-преобразователя 3, усилителя 4 с переменным коэффициентом усиления и второго сумматора 6. В случае, если uo, и u)(j, О, первый и второй релейные элеме ты 7 и 8 имеют на выходе сигналььсоответствуго щие логическим нулям. При поступлении этих сиг налов на входы первого и второго элементов И 9 и 10. на выходе элемента И 9 формируется сигнал, соответствующий сигаалу Логической 1, а на выходе элемента И 10 - логическому 0. Сигнал логической Г,, поступающий на входы блока 11 исполнительных органов, является раэреигающим для срабатывания исполнительных органов, создающих управляющие воздействия (моменты) определенного знака (исполнительные органы имеют релейные характеристики - релейные исполнительные органы). При поступлении разрешающего сигнала на- первый вход блока 11 исполнительных органов к объекту управления 12 прикладывается положительное управляющее воздействие, а при поступлении такого сигнала на второй вход - отрицательное. В случае, если w О и uJ О, логическая часть устройства работает аналогично описанному вьпне случавд, но разрешающий сигнал поступает с элемента И 10 на второй вход блока 1 исполнительных органов и к объекту управления 12 прикладывается отрицательное управляющее воздействие. Характер процесса управления зависит от величины тсоэффициента /i усилителя с переменным коэффициентом усиления 4. При 1 устройство работает аналогично прототипу, осуществляя оптимальное по быстродействию управ- ление. При увеличении значения р процесс становится более экономичным по затратам энергии, но соответственно возрастает время, необходимое для проведения всего процесса управления. Коэффициент усиления р усилителя с переменным коэффициентом усиления 4 может быть подобран таким образом, чтобы характер процесса управления бьш удовлетворительным как по времени регулирования, так и по.затратам энергии на процесс регулирования. Предлагаемое устройство может быть использовано и для управления объектами с ограниченной жесткостью конструкции (наличие гибких элементов в конструкции объекта), так выбор соответствующего коэффициента усиления /Ь усилителя с переменньп коэффициентом усиления 4 позволяет снизить до допустимой нормы возмущения, возникающие в процессе управления из-за нежесткостн конструкции объекта. Формула изобретения Система ориентации и стабилизации, содержащая датчик угла и последовательно соедиценные блок исполнительных органов, объект управления, датчик угловой скорости, усилитель-преобразователь, первые сумматор и релейный элемент, причем второй выход блока исполнительных органов соединен с вторым входо|и объекта управления, второй выход которого подключен к входу датчика угла, соединенного своим выходом с вторым входом Первого сумматора, отличающаяся тем, что, с целью снижения энергозатрат на процесс управления и расширения области использования системы, она соДёржит первый элемент И и последовательно соединенные усилитель с переменным коэффициентом усиления, вторые сумматор, релейный элемент и элемент И, причем вход усилителя с переменным коэффициентом усиления подключен к выходу усилителя-преобразователя, выход датчика угла соединен с вторым входом второго сумматора.
выход второго релейного элемента подключен к первому входу первого элемента И, выход первого релейного элемента соединен с вторыми входами первого и второго элементов И, выходы которых подключены соответственно к первому н второму входам блока исполнительных органов. .
Источники информации, принятые во внимание при экспертизе
рис. 7.5 (прототип).
