Заявляемое изобретение относится к способам автоматического управления полетом высокоманевренного самолета, в частности к способам, обеспечивающим требуемые характеристики продольной устойчивости и управляемости самолета.
Известны способы автоматического управления полетом самолета, при которых требования продольной устойчивости и управляемости самолета обеспечиваются благодаря использованию статических автоматов продольного управления (АПУ). Известные способы описаны, например, в книгах: Михалев И.А. и др. Системы автоматического управления самолетом. Методы анализа и расчета. М., Машиностроение, 1971, с.142, 146-150; под ред. Федорова С.М. Автоматизированное управление самолетами и вертолетами. М., Транспорт, 1977, с.76-77.
К недостаткам известных способов автоматического управления, предусматривающих использование АПУ, следует отнести тот факт, что, применительно к высокоманевренному самолету типа МИГ-29КУБ, при выходе привода аэродинамического руля на предельные значения, система «Самолет-АПУ» размыкается по сигналам обратной связи. В системе в продольном движении самолета возникают существенные колебания и, кроме того, «свободный ход» ручки управления, т.е. состояние, характеризующееся тем, что при выходе привода на предельные значения при определенной величине сигнала с датчика положения ручки дальнейшее увеличение перемещения ручки и затем перемещение ее в противоположном направлении до момента, когда привод «сходит с упора», не приводит к изменению нормальной перегрузки. В данном диапазоне перемещения ручки управления летчиком самолет становится неуправляемым, что из условий безопасности полета недопустимо.
Наиболее близким по технической сущности к заявляемому способу является способ автоматического управления полетом высокоманевренного самолета, предусматривающий использование статического АПУ, описанный в книге Оболенского Ю.Г. Управление полетом маневренных самолетов. М., филиал Воениздат, 2007, с.254.
Однако данному способу присущи недостатки, описанные выше, не позволяющие обеспечить требуемые характеристики устойчивости и управляемости в продольном движении самолета.
Целью настоящего изобретения является обеспечение требуемых характеристик управляемости самолета путем динамического ограничения управляющего сигнала и ликвидации «свободного хода» ручки управления летчика и повышения тем самым безопасности полета.
Поставленная цель достигается за счет того, что согласно предлагаемому способу автоматического управления полетом высокоманевренного самолета, предусматривающему использование статического автомата продольного управления, составляющую сигнала управления приводом аэродинамического руля, сформированную на основе сигнала с датчика положения ручки управления и сигнала с интегрального блока датчиков, соответствующего текущему значению нормальной перегрузки, динамически ограничивают, для чего данную составляющую сигнала управления приводом пропускают через нелинейный элемент с ограничением и зоной нечувствительности, определяемой минимальным и максимальным предельными значениями отклонения привода, при этом, если величина данной составляющей сигнала управления соответствует величине максимального сигнала, при котором привод перемещается до предельного значения, сигнал, сформированный на выходе нелинейного элемента, подают на интегрирующее устройство префильтра и переопределяют значение интеграла на его выходе, кроме того, формируют компенсационный сигнал «свободного хода» ручки управления, для чего определяют значение сигнала ручки управления в момент перемещения привода до предельных значений, вычисляют сигнал разности между текущим значением сигнала датчика положения ручки управления и значением сигнала датчика положения ручки управления в момент выхода привода на предельные значения, определяют производную сигнала разности и запоминают его значение при условии смены знака производной, по экспоненциальному закону уменьшают данный сигнал по абсолютной величине до нуля в момент времени, соответствующий равенству текущего значения сигнала датчика положения ручки управления и значения сигнала датчика положения ручки управления в момент выхода привода на максимальные значения, вычисляют сигнал разности между текущим значением сигнала датчика положения ручки управления и компенсационным сигналом «свободного хода» ручки управления и подают его на префильтр.
Сущность изобретения поясняется чертежом, на котором представлена блок-схема системы, реализующей заявляемый способ автоматического управления полетом высокоманевренного самолета, при котором используется статический автомат продольного управления.
Данная система содержит ручку 1 управления, датчик 2 положения ручки управления, первый сумматор 3, префильтр 4, второй сумматор 5, третий сумматор 6, привод 7 аэродинамического руля 8, интегральный блок 9 датчиков, изодромный фильтр 10, нелинейный элемент 11 с ограничением и зоной нечувствительности, определяемой значениями минимального и максимального отклонения привода 7 и формирователь 12 компенсационного сигнала «свободного хода» ручки 1 управления.
Летчик, управляя самолетом, отклоняет ручку 1 управления, при этом на выходе датчика 2 положения ручки формируется сигнал, пропорциональный отклонению ручки 1, который через первый вход сумматора 3 подают на первый вход префильтра 4, посредством которого осуществляют фильтрацию данного сигнала, ограничение скорости его изменения и формируют коэффициент по данному сигналу, обеспечивающий требуемый градиент управления в системе. Сигнал с выхода префильтра 4 через последовательно соединенные сумматоры 5 и 6 передают на вход привода 7, с помощью которого отклоняют аэродинамический руль 8 и осуществляют управление самолетом, изменяя величины нормальной перегрузки и угловой скорости тангажа, фиксируемые интегральным блоком 9 датчиков. Сигнал nу нормальной перегрузки с первого выхода интегрального блока 9 датчиков поступает в качестве сигнала отрицательной обратной связи на второй вход сумматора 5, а сигнал ωz угловой скорости тангажа со второго выхода интегрального блока 9 датчиков через изодромный фильтр 10 поступает на второй вход сумматора 6. Сигнал, сформированный на выходе сумматора 5, поступает на вход нелинейного элемента 11. При значении управляющего сигнала на выходе сумматора 5, соответствующем максимальному (предельному) перемещению привода 7, на выходе нелинейного элемента 11, выполняющего в совокупности с интегралом префильтра 4 функцию динамического ограничителя, формируется сигнал либо отрицательной обратной связи, поступающий на вход интеграла префильтра (при аналоговой реализации системы), либо сигнал, переопределяющий значение интеграла (при цифровой реализации). Отметим, что в статике сигнал угловой скорости, пропущенный через изодромный фильтр 10 и поступающий на второй вход сумматора 6, равняется нулю, поэтому привод 7 будет выходить практически на предельные значения, и при этом будет сохраняться демпфирование в системе, т.е. колебательность отсутствует. Сигнал с нелинейного элемента 11 поступает также на первый вход формирователя 12 компенсационного сигнала «свободного хода» ручки 1 управления и информирует о сигнале на выходе сумматора 5, соответствующем выходу привода 7 на предельные значения. При этом определяют значение сигнала датчика 2 положения ручки как величину сигнала на выходе префильтра 4, деленную на коэффициент Кш усиления по сигналу ручки управления. Затем определяют сигнал разности между текущим значением сигнала датчика 2 положения ручки управления и его величиной при сигнале на выходе сумматора 5, соответствующем выходу привода на предельные значения, подают данный сигнал на вход сумматора 3, определяют производную сигнала разности и запоминают его значение при смене знака производной. Таким образом, при измененном направлении движения ручки 1 управления перемещение привода 7 будет происходить в направлении уменьшения его значения по абсолютной величине, изменяя перегрузку («свободный ход» ручки будет ликвидирован). Кроме того, когда при отклонении ручки текущая величина сигнала с датчика положения руки становится равной величине, при которой привод выходит на предельные значения, равномерно во времени уменьшают по абсолютной величине сигнал, поступающий на второй вход сумматора 3.
Для реализации заявленного способа автоматического управления высокоманевренным самолетом не требуется специального оборудования. Так, в качестве интегрального блока датчиков может быть использован блок ИБД-51, а функции вычислителей и формирователя компенсационного сигнала могут быть реализованы с помощью бортовой вычислительной машины.
Как показали результаты моделирования комплексной системы управления КСУ-941, при использовании данного способа автоматического управления высокоманевренным самолетом предоставляется возможность при перемещении привода до максимальных значений ликвидировать колебания в системе и «свободный ход» ручки управления летчика, тем самым улучшить характеристики устойчивости и управляемости системы и повысить безопасность полета.
Таким образом, предлагаемый способ реализуем и применим, в частности, для высокоманевренного самолета типа МИГ-29 КУБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2369524C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383466C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383467C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2373111C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2380279C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2009 |
|
RU2387578C1 |
Изобретение относится к способам автоматического управления полетом высокоманевренного самолета. Динамически ограничивают составляющую сигнала управления приводом аэродинамического руля, сформированную на основе сигнала с датчика положения ручки управления и сигнала с интегрального блока датчиков, соответствующего текущему значению нормальной перегрузки. Составляющую сигнала управления приводом пропускают через нелинейный элемент с ограничением и зоной нечувствительности. Сигнал, сформированный на выходе нелинейного элемента, подают на интегрирующее устройство префильтра, формируют компенсационный сигнал «свободного хода» ручки управления. Вычисляют сигнал разности между текущим значением сигнала датчика положения ручки управления и компенсационным сигналом «свободного хода» ручки управления и подают его на префильтр. Достигается улучшение характеристики устойчивости и управляемости системы и повышается безопасность полета. 1 ил.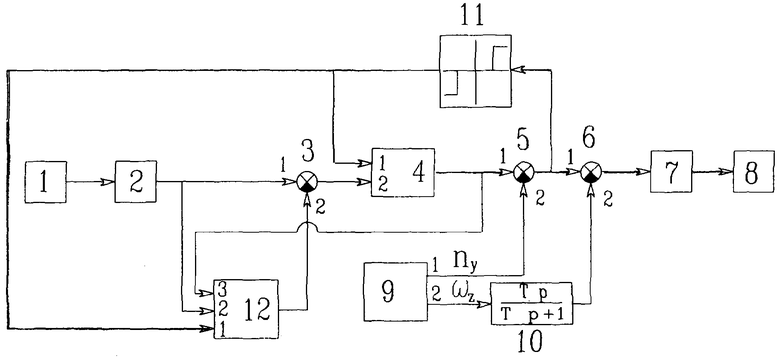
Способ автоматического управления полетом высокоманевренного самолета, предусматривающий использование статического автомата продольного управления, отличающийся тем, что составляющую сигнала управления приводом аэродинамического руля, сформированную на основе сигнала с датчика положения ручки управления и сигнала с интегрального блока датчиков, соответствующего текущему значению нормальной перегрузки, динамически ограничивают, для чего данную составляющую сигнала управления приводом пропускают через нелинейный элемент с ограничением и зоной нечувствительности, определяемой минимальным и максимальным предельными значениями отклонения привода, при этом, если величина данной составляющей сигнала управления соответствует величине максимального сигнала, при котором привод перемещается до предельного значения, сигнал, сформированный на выходе нелинейного элемента, подают на интегрирующее устройство префильтра и переопределяют значение интеграла на его выходе, кроме того, формируют компенсационный сигнал «свободного хода» ручки управления, для чего определяют значение сигнала ручки управления в момент перемещения привода до предельных значений, вычисляют сигнал разности между текущим значением сигнала датчика положения ручки управления и значением сигнала датчика положения ручки управления в момент выхода привода на предельные значения, определяют производную сигнала разности и запоминают его значение при условии смены знака производной, по экспоненциальному закону уменьшают данный сигнал по абсолютной величине до нуля в момент времени, соответствующий равенству текущего значения сигнала датчика положения ручки управления и значения сигнала датчика положения ручки управления в момент выхода привода на максимальные значения, вычисляют сигнал разности между текущим значением сигнала датчика положения ручки управления и компенсационным сигналом «свободного хода» ручки управления и подают его на префильтр.
| Оболенский Ю.Г | |||
| Управление полетом маневренных самолетов | |||
| - М.: филиал Воениздат, 2007, с.254 | |||
| Михалев И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| Методы анализа и расчета | |||
| - М.: Машиностроение, 1971, с.142, 146-150 | |||
| Система управления нормальной перегрузкой самолета с органами непосредственного управления подъемной силой | 1979 |
|
SU857939A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПРОДОЛЬНО-БАЛАНСИРОВОЧНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310899C1 |
| GB 1239936 А, 21.07.1971 | |||
| US 6729579 В1, 04.05.2004 | |||
| US 5001646 А, 19.03.1991. | |||

