Изобретение относится к области измерения постоянных и переменных в диапазоне частот 0-1 Гц магнитных индукций с помощью трехкомпонентных магнитометров, поверяемых в трехкомпонентной мере магнитной индукции (МИ).
Магнитометры аттестуются и поверяются (или калибруются) с помощью трехкомпонентных мер МИ. Мера МИ представляет собой систему трех образцовых катушек с токами, которые создают в центре меры МИ нормированное магнитное поле, которое измеряет аттестуемый магнитометр, размещенный в центре меры МИ. По разности показаний магнитометра и воспроизводимой МИ мерой МИ судят о размере погрешностей магнитометра. Разумеется, к точности воспроизведения мерой МИ предъявляют очень высокие требования. Главным источником погрешности воспроизведения постоянного МП являются внешние низкочастотные помехи в диапазоне 0-1 Гц. Например, постоянная и переменная составляющие магнитного поля Земли (МПЗ).
Переменную составляющую МПЗ называют вариациями. Особенностью МПЗ и вариаций МПЗ является то, что в пределах габаритов меры их можно считать однородными, то есть независящими от пространственных координат. На широте СПб уровень постоянного МПЗ достигает 50000 нТл. СКО спокойных или невозмущенных вариаций МПЗ в частотном диапазоне 0.001-1 Гц не превосходит 0.3-0.8 нТл.
Кроме МПЗ имеют место индустриальные помехи (ИП), например помехи линий питания электротранспорта на постоянном токе (трамвай, троллейбус, метро, пригородная электричка). В городе и пригороде интенсивность ИП может превосходить уровень вариаций МПЗ в тысячи раз. Особенность ИП состоит в том, что они сильно зависят от координат, т.е. ИП - существенно неоднородны. Традиционный способ борьбы с ИП состоит в том, что меру МИ размещают загородом как можно дальше от линий электротранспорта на постоянном токе, чтобы снизить влияние ИП.
Известен способ подавления внешних помех в мере МИ (Р.Г. Скрынников. Стабилизаторы напряженности магнитного поля. Л-д. «Энергия». 1975. С.28-33), где используют сигнал, пропорциональный сумме полей воспроизведения и помехи в точке, удаленной от центра меры МИ, для компенсации помехи в центре.
Известен также способ устранения внешних помех в мере МИ (Torben Risbo et al. Oersted pre-flight magnetometer calibration mission // Measurement Science and Technology v.14, 2003, p.677), где вариации МПЗ непрерывно измеряются образцовым трехкомпонентным магнитометром, удаленным от центра меры МИ в подземное помещение с температурной стабилизацией. Мера МИ включает рабочие и компенсационные обмотки для компенсации постоянного МПЗ и вариаций МПЗ. Точка измерения вариаций МПЗ отнесена во внешнюю область меры. Расстояние, на которое она отнесена, не указано. Не указано также расстояние до ближайшего источника ИП. Предположительно это расстояние превышает 2 км, так как вариациями ИП в этом способе пренебрегают.
Аналогичная система компенсации МПЗ и вариаций МПЗ применена на магнитной станции в п.Кавголово (под С-Петербургом), где точка измерения вариаций отнесена во внешнюю область меры от центра меры МИ на 4 м. Мера МИ представляет собой квадратные катушки Гельмгольца размером 2 м × 2 м. Расстояние от магнитной станции до линии электрички (мощнейший источник ИП) около 2000 м. При таких параметрах (4 м и 2000 м) система хорошо компенсирует однородные вариации, но компенсация ИП оставляет желать лучшего.
На той же магнитной станции использован метод стабилизации МИ (Т.И.Чхиквадзе и В.Я.Шифрин. Научные и практические основы метрологического обеспечения квантовой магнитометрии в области слабых постоянных магнитных полей. // Измерительная техника, 1990, №12, с.33-35) с помощью компенсационного модульного магнитометра, удаленного от центра меры МИ на 0.5 м, то есть компенсационный магнитометр находится внутри меры МИ.
Известен также метод стабилизации МИ, где компенсационный (модульный) магнитометр удален от центра на расстояние 0.2 м (М.В.Балабас и др. Прецизионный стабилизатор магнитной индукции. / Сб. Создание средств измерений для метрологического обеспечения прецизионных нанотесламетров. Л-д, ВНИИМ, 1988 г. С.40-45).
Малые разнесения (0.2-0.5 м) хорошо защищают меру МИ не только от вариаций МПЗ, но и от ИП. Вместе с тем малые разнесения ограничивают рабочую область меры МИ и приводят к нежелательному взаимодействию компенсационного магнитометра с измерительным или калибруемым (аттестуемым или поверяемым) датчиком, расположенным в центре меры.
Напомним, что внешняя помеха должна контролироваться в процессе калибровки независимо от показаний калибруемого датчика, так как до завершения калибровки эти показания не лигитимны.
Известный способ (Torben Risbo et al. 2003) принят в качестве прототипа заявляемого способа по совокупности существенных признаков.
Известный способ (Torben Risbo et al. 2003) включает определение постоянных по МИ рабочих и компенсационных обмоток меры МИ в ее центре, компенсацию постоянного МП с помощью установки постоянных токов обмоток компенсации, воспроизведение МИ мерой МИ с помощью установки постоянных токов рабочих обмоток, измерение этих токов, измерение МИ в удаленной от центра меры МИ точке и непрерывную компенсацию вариаций МП путем непрерывной выработки токов питания обмоток компенсации вариаций.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа, является то, что известный способ не компенсирует переменные приращения ИП на базе между точкой измерения помех и центром меры МИ.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности определения помех внешнего происхождения в центре меры МИ.
Технический результат, получаемый при осуществлении изобретения, заключается в обеспечении возможности работы меры МИ на меньших расстояниях до источников ИП.
Указанный технический результат достигается тем, что в заявляемом способе определения внешней помехи в центре меры МИ, включающем определение постоянных по МИ рабочих и компенсационных обмоток меры МИ в ее центре, компенсацию постоянного МП с помощью установки постоянных токов обмоток компенсации, воспроизведение МИ мерой МИ с помощью установки постоянных токов рабочих обмоток, измерение этих токов, а также измерение МИ в удаленной от центра меры МИ точке, в отличие от известного способа определение постоянной по МИ и измерение МИ осуществляют в 6 или 8, или 12 точках, равноудаленных от центра меры МИ, причем точки 6-точечной группы размещают на полуосях системы координат меры МИ, точки 8-точечной группы размещают в вершинах куба, центр которого совмещен с центром меры МИ, а стороны которого параллельны осям системы координат меры МИ, точки 12-точечной группы размещают в координатных плоскостях системы координат меры МИ, в вершинах квадратов, центры которых совмещены с центром меры МИ, а стороны которых параллельны осям системы координат меры, при этом внешнюю помеху определяют по формуле
Ввнеш(0)=Вср-Ccp1I1-Cсp2I2,
где
Ввнеш(0) - вектор-столбец МИ магнитного поля внешнего происхождения в центре меры МИ;
 - средняя МИ для m точек; m=6 или 8, или 12;
- средняя МИ для m точек; m=6 или 8, или 12;
Ва - вектор-столбец МИ в точке а; а=1, 2 … m;
 - средняя матрица постоянных по МИ рабочих обмоток меры МИ;
- средняя матрица постоянных по МИ рабочих обмоток меры МИ;
Cx1a, Cy1a, Cz1a - вектор-столбцы постоянных по МИ в точке а рабочих обмоток меры МИ соответственно x1, y1, z1;
 - вектор-столбец токов рабочих обмоток меры МИ соответственно x1, y1, z1;
- вектор-столбец токов рабочих обмоток меры МИ соответственно x1, y1, z1;
 - средняя матрица постоянных по МИ обмоток компенсации меры МИ;
- средняя матрица постоянных по МИ обмоток компенсации меры МИ;
Cx2a, Cy2a, Cz2a - вектор-столбцы постоянных по МИ в точке а обмоток компенсации меры МИ соответственно x2, y2, z2;
 - вектор-столбец токов обмоток компенсации меры МИ соответственно x2, y2, z2.
- вектор-столбец токов обмоток компенсации меры МИ соответственно x2, y2, z2.
На Фиг.1 изображена упрощенная схема реализации известного и заявляемого способов.
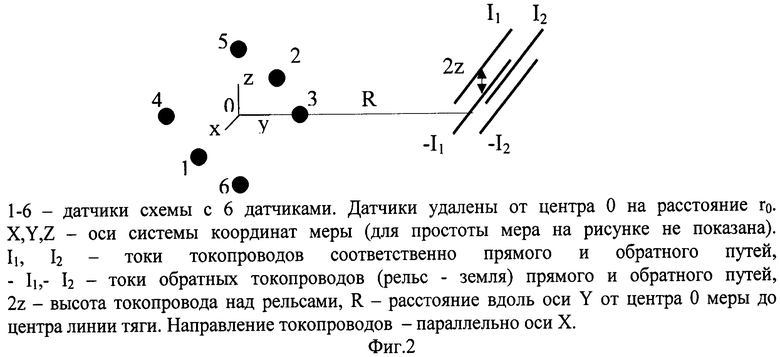
На Фиг.2 изображена схема для расчета методической погрешности определения в центре меры МИ помехи от железнодорожной линии электротяги на постоянном токе.
На Фиг.3 изображена схема для расчета методической погрешности определения в центре меры МИ помехи от намагниченного грузовика, проезжающего около этой меры.
Схема, изображенная на Фиг.1, включает схему 1 с одним трехкомпонентным датчиком индукции МП и схемы 2, 3, 4 групп трехкомпонентных датчиков, расположенных на сфере с центром 0 в центре меры МИ симметрично относительно осей координат меры МИ X, Y, Z. Схема 2 для m=6, схема 3 - для m=8 датчиков, схема 4 - для m=12. Радиус сферы r0 превышает габарит меры МИ. Магниточувствительные оси всех датчиков сориентированы вдоль осей координат X, Y, Z. Координаты точек расположения датчиков на (воображаемой) сфере r0 (см. Фиг.1) показаны в Таблице 1.
c 1 точкой
m=6
m=8
m=12
Заявляемый способ основан на двух соотношениях, полученных в статье (В.Г. Семенов. Синтез сферических методов определения параметров источников магнитного поля внутреннего и внешнего происхождения. // Измерительная техника, 1990, №12, с.33-35):

где Ввнш(0) - индукция МП в центре (воображаемой) сферы радиуса R от произвольных источников МП, расположенных во внешней области сферы, Тл;
S=4πR2 - поверхность сферы, м2;
dS - элемент поверхности сферы, м2;
В=Ввнт+Ввнш - МИ* в произвольной точке поверхности сферы с элементом dS или сумма МИ от источников МП, расположенных соответственно во внутренней и во внешней областях сферы.
* Далее векторы МИ будут представлены вектор-столбцами 3×1 в системе координат центра меры МИ (если не указано другой системы координат) и обозначены нежирным шрифтом, как это принято для векторов в пакете математических программ МатЛаб.
Для вычисления интеграла (1) вокруг меры МИ размещают трехкомпонентные датчики, как показано крупными черными точками на Фиг.1, по которым определяют приближенное значение (1)

где m=6, 8 или 12 - общее число точек с датчиками;
а - индекс точки с датчиком;
Вср - вектор-столбец среднего значения показаний всех датчиков, Тл.

где ΔВвнш - вектор-столбец погрешности определения первого члена интеграла (1) за счет ограниченного числа датчиков, Тл;
ΔВвнт - вектор-столбец погрешности определения интеграла (2) за счет ограниченного числа датчиков, Тл.
Точки а 6-точечной группы располагают на полуосях системы координат меры МИ на одинаковом расстоянии от центра меры МИ (см.схему 2 Фиг.1). Точки а 8-точечной группы располагают в вершинах куба, центр которого совпадает с центром меры МИ, стороны которого параллельны осям системы координат меры МИ (см.схему 3 Фиг.1). Точки а 12-точечной группы располагают в вершинах квадратов, совмещенных с координатными плоскостями системы координат меры МИ (см.схему 4 Фиг.1). Оси датчиков в точках а (приближенно) ориентируют вдоль осей x, y, z системы координат меры МИ.
Затем определяют постоянные по МИ рабочих и компенсационных обмоток меры МИ в каждой точке а, измеряют токи обмоток меры МИ и вычисляют погрешность интеграла (2) по формуле

где  - средняя матрица 3×3 постоянных по МИ рабочих обмоток 1 меры МИ, Тл/А;
- средняя матрица 3×3 постоянных по МИ рабочих обмоток 1 меры МИ, Тл/А;
Сх1а Cy1a Cz1a - вектор-столбцы постоянных по МИ в точке а рабочих обмоток 1x, 1y, 1z, Тл/А;
 - вектор-столбец токов рабочих обмоток 1x, 1y, 1z, A;
- вектор-столбец токов рабочих обмоток 1x, 1y, 1z, A;
 - средняя матрица постоянных по МИ обмоток компенсации 2 меры, Тл/А;
- средняя матрица постоянных по МИ обмоток компенсации 2 меры, Тл/А;
Сх2а Cy2a Cz2a - вектор-столбцы постоянных по МИ в точке а обмоток компенсации 2х, 2y, 2z, Тл/А;
 - вектор-столбец токов обмоток постоянной компенсации 2х, 2y, 2z, A.
- вектор-столбец токов обмоток постоянной компенсации 2х, 2y, 2z, A.
С помощью соотношений (4) и (5) определяют искомую внешнюю помеху по формуле

Как будет показано ниже, заявляемый способ в большинстве случаев позволяет пренебречь погрешностью ΔВвнш, поэтому уравнение измерения принимает вид

Вариационную часть внешней помехи определяют по формуле

где С02=(Cx Cy Cz)02 - матрица 3×3 постоянных по МИ обмоток компенсации 2x, 2y, 2z в центре меры МИ, Тл/А;
C02I2 - вектор-столбец МИ, созданной обмотками компенсации в центре меры, Тл.
Магнитную индукцию, воспроизводимую мерой МИ в ее центре, определяют по формуле

где С01=(Сх Cy Cz)01 - матрица 3×3 постоянных по МИ рабочих обмоток 1x 1y 1z меры МИ в ее центре, Тл/А;
C01I1 - вектор-столбец МИ, созданной рабочими обмотками в центре меры МИ, Тл.
Постоянные по МИ определяют по известному методу [патент РФ 2282205. Способ определения постоянных по магнитной индукции обмоток…]. Например,

где Cx1a - вектор-столбец постоянной по МИ (рабочей) обмотки 1х меры МИ в точке а, Тл/А;
Bx1a+, Bx1a- - вектор-столбцы МИ, созданные (рабочей) обмоткой 1х меры МИ в точке а при пропускании по обмотке 1х тока I1x соответственно положительной и отрицательной полярности, Тл.
Таким образом, согласно соотношению (10), в каждую точку а устанавливают трехкомпонентный датчик магнитометра, который приближенно ориентируют параллельно осям системы координат меры МИ в ее центре, затем компенсируют показания датчика приближенно до нуля токами обмоток компенсации x2, y2, z2, затем по рабочей обмотке 1х меры МИ пропускают ток I1x, измеряют этим датчиком соответствующую магнитную индукцию Вх1а+, созданную в точке а рабочей обмоткой 1х меры МИ с током I1x, меняют полярность этого тока, измеряют соответствующую магнитную индукцию Bx1a-, измеряют ток I1x и вычисляют по соотношению (10) вектор-столбец постоянной по МИ Сх1а. Аналогично находят вектор-столбцы постоянных по МИ рабочих обмоток меры МИ 1y, 1z - Cy1a,Cz1a, после чего вычисляют среднюю матрицу постоянных по МИ С. Аналогично определяют постоянные по МИ компенсационных обмоток меры МИ Сх2а, Cy2a, Cz2a и Ccp2 с тем лишь отличием, что внешнее магнитное поле компенсируют с помощью токов рабочих обмоток.
Операции по определению постоянных по МИ проводят ночью, когда обесточиваются ближние линии транспорта на электротяге и уровень неоднородных ИП снижается в 15-20 раз. Определение постоянных осуществляют однажды на долгий отрезок времени.
Для проверки заявляемого способа осуществлено компьютерное моделирование его в сравнении с известным способом с помощью системы МатЛаб. Проверка заключается в расчете (методической)* погрешности ΔВвнш для стандартной трехкомпонентной меры МИ в условиях источников внешних (неоднородных) помех, изображенных на Фиг.2 и 3.
* Методической погрешностью называется погрешность метода или погрешность самого уравнения (косвенного) измерения, в нашем случае уравнения (7). Методическая погрешность вычисляется при точных значениях аргументов-результатов прямых измерений.
Фиг.2. Источник помех - двухколейная линия электротяги на постоянном токе. Такой источник характеризуется величиной 2zI (I=I1+I2), которая изменяется от 0 до 2zIмакс=6×105 Ам**.
** Таково типичное максимальное значение для пригородной электрички под Санкт-Петербургом в п.Кавголово. На расстоянии R=2 км от железной дороги расположена магнитная станция, где проводят прецизионные магнитные измерения с погрешностью не выше 0.1 нТл в трехкомпонентной мере МИ из квадратных контуров Гельмгольца с длиной стороны около 2 м. Трехкомпонентный датчик для компенсации помех удален от центра на расстояние r0=6 м.
Фиг.3 Источник помех - грузовой автомобиль с постоянным магнитным моментом М=[200 100 300]Ам2 |М|=360 Ам2***, находится в точке с координатами х=0,у=R,z=0, как показано на Фиг.2.
***В книге [Семевский и др. Специальная магнитометрия. 2003. С.38] автомобиль массой 1 т оценивается размером магнитного момента |M|=150-300 Ам2.
Результаты расчета модуля методической погрешности |ΔВвнш| представлены ниже.
Как показывают данные таблиц, (неоднородные) помехи от «железа» транспортных единиц (см. Таблицу 2) быстро затухают на расстояниях более 30 м. Основной вклад в (неоднородную) помеху на расстояниях до 1500 м дают линии питания электротранспорта на постоянном токе (см.Таблицу 1).
Как следует из данных таблиц, заявляемый способ обеспечивает возможность работы меры МИ при значительно меньших расстояниях до линий электротранспорта (в десятки раз) за счет резкого снижения методической погрешности определения внешних помех, включая неоднородные помехи (в сотни и тысячи раз). Фактически заявляемый способ обеспечивает возможность работы в черте города, где особенно высок уровень неоднородных помех.
В заключение укажем на главное отличие заявляемого способа. Известный способ непрерывно компенсирует (однородную) помеху, но при этом пропускает неоднородные приращения ее. Заявляемый способ определяет мгновенное значение всей помехи и непрерывно отслеживает ее, что дает возможность учесть помеху, включая ее неоднородную часть, при воспроизведении магнитной индукции мерой по уравнению (9).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2012 |
|
RU2497139C1 |
| Способ автоматического размагничивания кораблей | 2018 |
|
RU2703765C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТОЯННЫХ ПО МАГНИТНОЙ ИНДУКЦИИ ОБМОТОК ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2005 |
|
RU2282205C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |
| Способ калибровки трехкомпонентного магнитометра | 2017 |
|
RU2654073C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО МОМЕНТА КВАДРАТНОЙ КАТУШКИ С ТОКОМ | 2006 |
|
RU2307370C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ МАГНИТНОГО ДИПОЛЯ | 2010 |
|
RU2456642C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО ДАТЧИКА МАГНИТОМЕТРА ОТНОСИТЕЛЬНО МЕРЫ МАГНИТНОГО МОМЕНТА | 2005 |
|
RU2290657C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2008 |
|
RU2365877C1 |

Изобретение относится к области измерения магнитной индукции с помощью трехкомпонентной меры магнитной индукции. Заявлен способ определения внешней помехи в центре меры магнитной индукции (МИ). Заявленный способ включает определение постоянных по МИ рабочих и компенсационных обмоток меры МИ в ее центре, компенсацию постоянного магнитного поля с помощью установки постоянных токов обмоток компенсации, воспроизведение МИ мерой МИ с помощью установки постоянных токов рабочих обмоток, измерение этих токов, а также измерение МИ в удаленной от центра меры МИ точке. Определение постоянной по МИ и измерение МИ осуществляют в 6 или 8, или 12 точках, равноудаленных от центра меры МИ. Причем точки 6-точечной группы размещают на полуосях системы координат меры МИ, точки 8-точечной группы размещают в вершинах куба, центр которого совмещен с центром меры МИ, а стороны которого параллельны осям системы координат меры МИ, точки 12-точечной группы размещают в координатных плоскостях системы координат меры МИ, в вершинах квадратов, центры которых совмещены с центром меры МИ, а стороны которых параллельны осям системы координат меры. Заявляемый способ позволяет определять помеху с учетом ее неоднородности и обеспечивает возможность работы меры вблизи от источников помех. 3 табл., 3 ил.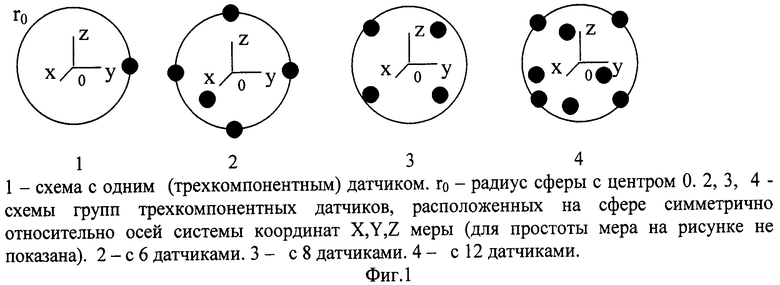
Способ определения внешней помехи в центре меры магнитной индукции (МИ), включающий определение постоянных по МИ рабочих и компенсационных обмоток меры МИ в ее центре, компенсацию постоянного магнитного поля с помощью установки постоянных токов обмоток компенсации, воспроизведение МИ мерой МИ с помощью установки постоянных токов рабочих обмоток, измерение этих токов, а также измерение МИ в удаленной от центра меры МИ точке, отличающийся тем, что определение постоянной по МИ и измерение МИ осуществляют в 6, или 8, или 12 точках, равноудаленных от центра меры МИ, причем точки 6-точечной группы размещают на полуосях системы координат меры МИ, точки 8-точечной группы размещают в вершинах куба, центр которого совмещен с центром меры МИ, а стороны которого параллельны осям системы координат меры МИ, точки 12-точечной группы размещают в координатных плоскостях системы координат меры МИ, в вершинах квадратов, центры которых совмещены с центром меры МИ, а стороны которых параллельны осям системы координат меры, при этом внешнюю помеху определяют по формуле
Ввнeш(0)=Bср-Ccp1I1-Ccp2I2,
где Ввнеш(0) - вектор индукции МИ магнитного поля внешнего происхождения в центре меры МИ;
 - средняя МИ для m точек; m=6, или 8, или 12;
- средняя МИ для m точек; m=6, или 8, или 12;
Ba - вектор-столбец МИ в точке а; а=1, 2 … m;
 - средняя матрица постоянных по МИ рабочих обмоток меры МИ;
- средняя матрица постоянных по МИ рабочих обмоток меры МИ;
Cx1a, Cy1a, Cz1a - вектор-столбцы постоянных по МИ в точке а рабочих обмоток меры МИ соответственно x1, y1, z1;
 - вектор-столбец токов рабочих обмоток меры МИ соответственно x1, y1, z1;
- вектор-столбец токов рабочих обмоток меры МИ соответственно x1, y1, z1;
 - средняя матрица постоянных по МИ обмоток компенсации меры МИ;
- средняя матрица постоянных по МИ обмоток компенсации меры МИ;
Cx2a, Cy2a, Cz2a - вектор-столбцы постоянных по МИ в точке а обмоток компенсации меры МИ соответственно x2, y2, z2;
 - вектор-столбец токов обмоток компенсации меры МИ соответственно х2, y2, z2.
- вектор-столбец токов обмоток компенсации меры МИ соответственно х2, y2, z2.
| СПОСОБ КОМПЕНСАЦИИ МАГНИТНЫХ ПОМЕХ ЛИНИИ ЭЛЕКТРОТЯГИ НА ПОСТОЯННОМ ТОКЕ | 2006 |
|
RU2319973C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТОЯННЫХ ПО МАГНИТНОЙ ИНДУКЦИИ ОБМОТОК ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2005 |
|
RU2282205C1 |
| СПОСОБ МИНИМИЗАЦИИ ПОГРЕШНОСТЕЙ В ДИФФЕРЕНЦИАЛЬНОМ МАГНИТОМЕТРЕ | 2003 |
|
RU2257593C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |

