Область техники, к которой относится изобретение
Изобретение относится к авиационным приборам, и в частности к пилотажно-навигационным приборам воздушного судна, способного к авторотации, такого как вертолёт, выполненным с возможностью индикации параметров состояния воздушного судна и рекомендаций пилоту при посадке воздушного судна в режиме авторотации.
Уровень техники
Полёт и посадка воздушного судна с несущим винтом, такого как, например, вертолёт, квадрокоптер, мультикоптер или автожир, в режиме авторотации является одним из наиболее сложных элементов управления воздушным судном. Однако для того, чтобы иметь возможность безопасно совершить аварийную посадку, например, в случае потери мощности или отказа двигателей навыками управления и безопасной посадки в этом аварийном режиме должен владеть любой пилот вертолёта или другого воздушного судна, способного к посадке в режиме авторотации.
В общем случае, алгоритм действий пилота в режиме авторотации зависит от типа воздушного судна и его технических характеристик, высоты и скорости полета, места посадки и других факторов. Как правило, основные действия при управлении воздушным судном в режиме авторотации, на примере вертолёта сводятся к следующему:
- сразу после отказа двигателя пилот должен перейти в режим авторотации;
- если после отказа двигателя скорость вращения несущего винта снизилась, необходимо раскрутить несущий винт путём уменьшения общего шага. Одновременно пилот должен оценить высоту и скорость снижения воздушного судна и стабилизировать режим снижения по вертикальной и горизонтальной скорости с помощью органов управления;
- за несколько метров до земли пилоту необходимо резко увеличить шаг несущего винта и компенсировать увеличение угла тангажа вертолета, потянув ручку управления «на себя» - произвести «подрыв».
При правильном выполнении стабилизированного снижения и своевременном «подрыве» вертолет приземляется плавно, почти вертикально или с коротким пробегом. Однако для правильного расчёта параметров полёта в режиме авторотации и своевременных действий органами управления пилоту необходима информация, представленная в максимально наглядной и легко и быстро понятной в условиях стресса форме.
Кроме того, в условиях реальных полётов вертолётов необходимость посадки в режиме авторотации может внезапно возникнуть вне аэродромов и искусственно оборудованных посадочных площадок, что потребует от пилота быстрой оценки окружающей обстановки и подбора площадки для безопасной посадки. Визуальная оценка местности в непосредственной близости от текущего местоположения вертолёта не всегда может дать представление о состоянии поверхности и неровностях рельефа на рассматриваемой площадке для посадки, о наличии препятствий, которые могут быть плохо заметны издалека, в особенности при полётах в условиях ограниченной видимости или в ночное время.
Учитывая вышеприведённые обстоятельства, существует потребность в способе и системе, которые обеспечили бы пилоту воздушного судна, способного к авторотации, такого как, в качестве неограничивающего примера, вертолёт, винтокрыл, конвертоплан, автожир и т.п., легко и быстро считываемую индикацию наиболее важных текущих параметров полёта в режиме авторотации, рекомендаций по управлению воздушным судном, в частности, для поддержания стабилизированного режима снижения и выполнения «подрыва» при авторотации, и команд наведения на посадочную площадку для безопасного приземления воздушного судна в режиме авторотации.
В источнике WO 2006076647 (Systems Technology Inc. и др., опубл. 20.07.2006) раскрыт реализуемый компьютером способ, который обеспечивает безопасную посадку винтокрылого летательного аппарата после отказа двигателя за счёт использования алгоритма оптимизации траектории в режиме реального времени, который выдаёт команды по движениям органами управления через интуитивно понятный дисплей пилота. Алгоритм формирует оптимальные траектории и команды управления с помощью способа оптимизации на основе прямой коллокации, решаемой с использованием средства решения задач нелинейного программирования. Вычисляемые управляющие вводы представляют собой общий шаг и тангаж летательного аппарата, которые легко отслеживаются и манипулируются пилотом или преобразуются в управляющие команды исполнительным механизмам для автоматического управления при авторотации в случае автономного винтокрылого летательного аппарата. К недостаткам данного известного решения можно отнести отсутствие средств индикации для пилота винтокрылого летательного аппарата, которые позволяли бы представлять пилоту информацию о параметрах полёта, выдавать рекомендации и команды наведения на площадку для безопасного приземления в наглядной и легко и быстро понятной в условиях стресса форме.
В источнике US 9242727 (Rockwell Collins Inc. и др., опубл. 26.01.2016) раскрыта система сигналов инициирования авторотации и подрыва, обеспечивающая пилоту вертолета визуальные и звуковые сигналы по пилотированию для успешного выполнения маневра авторотации. С того момента, как двигатель выходит из строя или перестаёт обеспечивать достаточную мощность для системы несущего винта, на пилотажно-навигационном приборе вертолёта при помощи дополнительных обозначений пилоту обеспечиваются указания по воздушной скорости, ориентации и высоте для перехвата и полета по правильной траектории для успешного входа в авторотацию и снижения на авторотации. Система отображает определенные сигналы по мере приближения вертолета к определенной высоте подрыва и выдаёт пилоту указания по подрыву при авторотации и приземлению с минимальной скоростью снижения. К недостаткам данного известного решения можно отнести то, что индикация по управлению вертолётом на режиме авторотации выдаётся пилоту с использованием существующего пилотажно-навигационного прибора, добавляя к присутствующим на экране данным дополнительную индикацию, что не является достаточно наглядным и усложняет восприятие информации пилотом в стрессовой ситуации.
Раскрытие изобретения
Учитывая вышеуказанные недостатки уровня техники, проблема, решаемая настоящим изобретением, состоит в сложности быстрого и адекватного восприятия пилотом информации с традиционных командно-пилотажных приборов в экстремальной ситуации и в условиях плохой видимости.
Задача настоящего изобретения состоит в создании способа и устройства индикации рекомендаций пилоту и параметров состояния вертолёта при аварийной посадке в режиме авторотации, в которых преодолены или по меньшей мере уменьшены вышеуказанные недостатки уровня техники.
Технический результат, достигаемый при реализации изобретения, состоит в повышении безопасности управления воздушным судном, способным к авторотации, за счёт индикации пилоту рекомендаций и параметров состояния воздушного судна при аварийной посадке в режиме авторотации в легко, быстро и точно воспринимаемой форме.
В первом аспекте изобретение относится к способу индикации рекомендаций пилоту и параметров состояния воздушного судна, способного к авторотации, при посадке в режиме авторотации, включающему в себя: отображение текущей высоты полета, отображение высоты «подрыва» при авторотации, при этом при посадке в режиме авторотации на дисплее параметров авторотации отображается кодируемая цветом степень отклонения горизонтальной и вертикальной скорости движения вертолёта от рекомендуемых значений для безопасной посадки в режиме авторотации, а также отображаются в цифровом и графическом виде рекомендации по выведению воздушного судна на безопасную траекторию посадки и рекомендованный курс на доступную площадку для наиболее безопасного приземления в данных условиях.
В одном или более вариантах выполнения изобретения индикация рекомендаций по выведению воздушного судна на безопасную траекторию может осуществляться символами, цвет которых определяется величиной отклонения текущих параметров состояния воздушного судна от их рекомендуемых значений. Рекомендованный курс на площадку для безопасного приземления может отображаться на дисплее параметров авторотации или на отдельном дисплее с картой местности. Отображаемое значение высоты «подрыва» при авторотации может кодироваться цветом в зависимости от разности между текущей высотой полета и высотой «подрыва» при авторотации. В одном или более вариантах выполнения на отдельном дисплее с картой местности могут отображаться рекомендуемые площадки для безопасного приземления, кодируемые цветом в зависимости от безопасности приземления на них.
Во втором аспекте изобретение относится к устройству индикации рекомендаций пилоту и параметров состояния воздушного судна, способного к авторотации, при посадке в режиме авторотации, включающему в себя: по меньшей мере один процессор, выполненный с возможностью обработки данных о параметрах полёта, параметрах окружающей среды и выдачи управляющих команд на дисплей параметров авторотации; и дисплей параметров авторотации, выполненный с возможностью отображения кодируемой цветом степени отклонения горизонтальной и вертикальной скорости движения вертолёта от рекомендуемых значений для безопасной посадки в режиме авторотации, а также отображения в цифровом и графическом виде рекомендаций по выведению воздушного судна на безопасную траекторию посадки и рекомендованного курса на доступную площадку для наиболее безопасного приземления в данных условиях. Устройство индикации рекомендаций пилоту и параметров состояния воздушного судна при посадке в режиме авторотации может быть дополнительно выполнено с возможностью отображения текущей высоты полета и отображения высоты «подрыва» при авторотации. В одном или более вариантах выполнения изобретения дисплей параметров авторотации может быть выполнен в виде отдельного дисплея. В других вариантах выполнения дисплей параметров авторотации может быть реализован как часть штатного пилотажно-навигационного прибора воздушного судна.
Устройство может быть выполнено с возможностью индикации рекомендаций по выведению воздушного судна на безопасную траекторию посредством символов, цвет которых определяется величиной отклонения текущих параметров состояния воздушного судна от их рекомендуемых значений. В одном или более вариантах выполнения устройство может быть выполнено с возможностью отображения рекомендованного курса на площадку для безопасного приземления на дисплее параметров авторотации или на отдельном дисплее с картой местности.
В одном или более вариантах выполнения устройства отображаемое значение высоты «подрыва» при авторотации может кодироваться цветом в зависимости от разности между текущей высотой полета и высотой «подрыва» при авторотации. Устройство может быть выполнено с возможностью отображения на отдельном дисплее с картой местности рекомендуемых площадок для безопасного приземления, кодируемых цветом в зависимости от безопасности приземления на них.
Специалистам в данной области техники будет понятно, что изобретение может быть представлено в форме других объектов, таких как, например, система индикации и/или управления воздушным судном, машиночитаемый носитель, компьютерный программный продукт и т.п., которые также являются частью изобретательского замысла.
Краткое описание чертежей
Чертежи приведены в данном документе для облегчения понимания сущности настоящего изобретения. Чертежи схематичны и не выполнены в масштабе. Они служат исключительно для иллюстрации и не предназначены для определения объема настоящего изобретения.
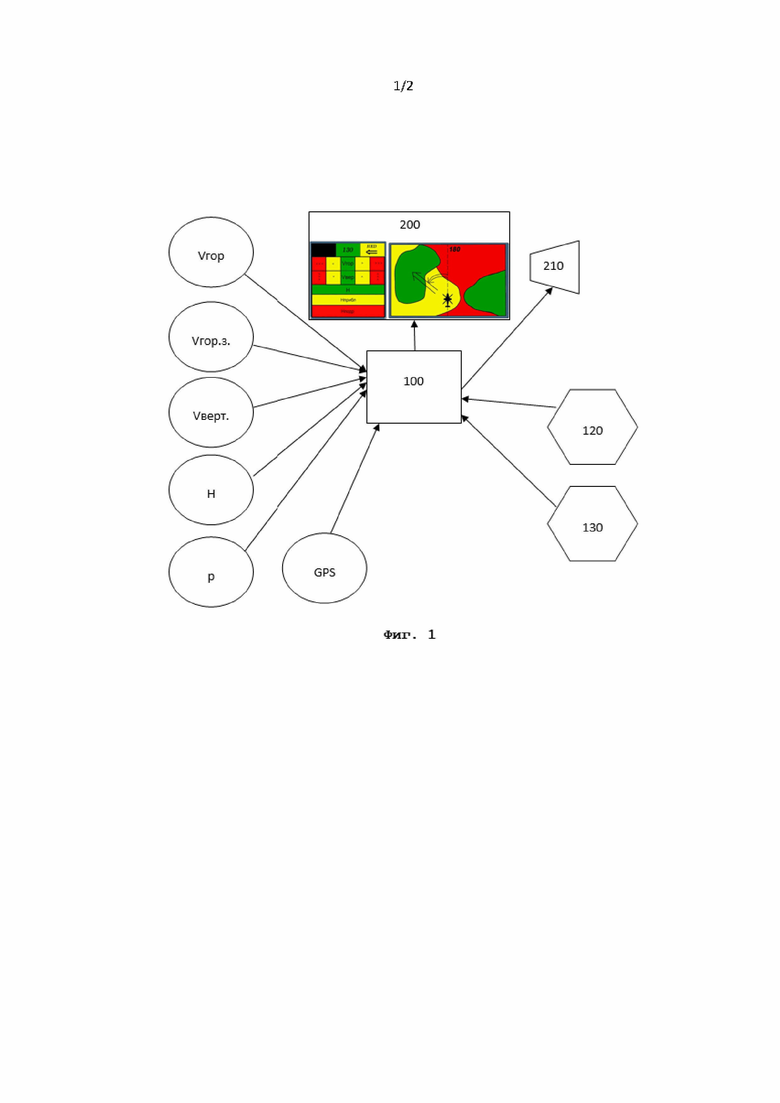
На Фиг. 1 приведена принципиальная схема устройства индикации рекомендаций пилоту и параметров состояния воздушного судна, способного к авторотации, при посадке в режиме авторотации согласно одному или более вариантам выполнения изобретения;
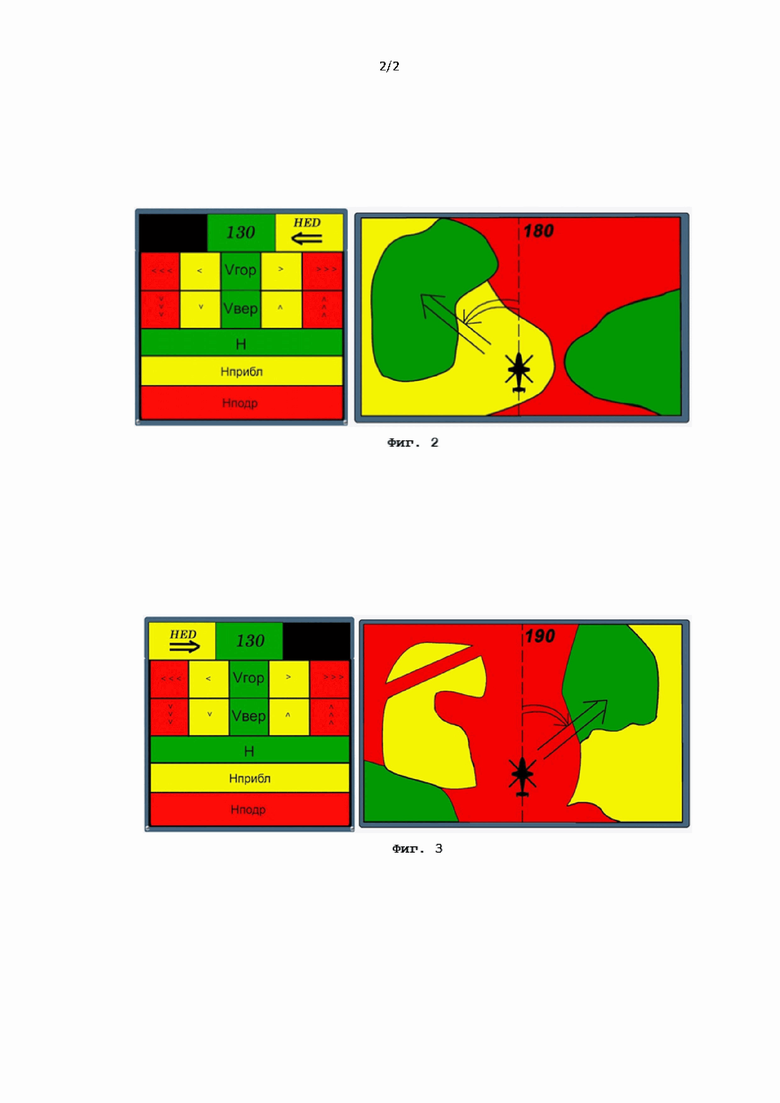
На Фиг. 2 проиллюстрирован примерный внешний вид экрана дисплея параметров авторотации, на котором отображаются кодируемые цветом степень отклонения параметров движения воздушного судна от рекомендуемых значений, а также рекомендации по выведению вертолета на безопасную траекторию посадки и рекомендованный курс на доступную площадку для безопасного приземления;
На Фиг. 3 проиллюстрирован другой примерный внешний вид экрана дисплея параметров авторотации, на котором отображаются кодируемые цветом степень отклонения параметров движения воздушного судна от рекомендуемых значений, а также рекомендации по выведению воздушного судна на безопасную траекторию посадки и рекомендованный курс на доступную площадку для безопасного приземления.
Осуществление изобретения
Согласно определению, авторотация - режим вращения воздушного винта летательного аппарата или турбины двигателя, при котором энергия, необходимая для вращения, отбирается от набегающего на винт потока.
Предлагаемое изобретение может быть реализовано по существу на любом летательном аппарате или воздушном судне, способном к авторотации. Ниже изобретение будет подробно описано применительно к вертолёту, однако следует понимать, что оно равным образом может быть применимо и в других летательных аппаратах, способных к выполнению посадки в режиме авторотации, таких как, не ограничиваясь, автожир, квадрокоптер, мультикоптер и т.п.
Изобретение относится к устройству индикации рекомендаций пилоту и параметров состояния вертолета при посадке в режиме авторотации (далее - устройство индикации), включающему в себя дисплей параметров авторотации, выполненный с возможностью отображения кодируемой цветом степени отклонения горизонтальной и вертикальной скорости движения вертолёта от рекомендуемых значений для безопасной посадки в режиме авторотации, а также отображения в цифровом и графическом виде рекомендаций по выведению вертолета на безопасную траекторию посадки и рекомендованного курса на доступную площадку для наиболее безопасного приземления в данных условиях. Также изобретение относится к соответствующему способу индикации рекомендаций пилоту и параметров состояния вертолета при посадке в режиме авторотации, осуществляемому предлагаемым устройством индикации.
Предлагаемое устройство индикации содержит по меньшей мере дисплей параметров авторотации, а также средства звуковой сигнализации. Кроме того, в некоторых неограничивающих вариантах выполнения изобретения устройство индикации может дополнительно содержать отдельный дисплей, выполненный с возможностью отображения карты местности с обозначением рекомендуемых площадок для безопасного приземления. В предпочтительном варианте выполнения по меньшей мере дисплей параметров авторотации выполнен в виде отдельного устройства, устанавливаемого в кабине вертолёта в качестве дополнения к штатным пилотажно-навигационным приборам и другому оборудованию. В различных вариантах выполнения средства звуковой сигнализации и/или упомянутый отдельный дисплей могут быть реализованы на основе штатного оборудования в кабине вертолёта либо также предусмотрены в виде отдельных компонентов. В некоторых вариантах выполнения по меньшей мере упомянутый отдельный дисплей может быть интегрирован со штатным пилотажно-навигационным прибором вертолёта. Следует понимать, что при том, что дисплей параметров авторотации предпочтительно реализован в виде отдельного устройства (дополнительного оборудования) по отношению к штатному оборудованию кабины вертолёта, в объём настоящего изобретения также входят варианты выполнения, при которых дисплей параметров авторотации также реализован на основе штатного пилотажно-навигационного оборудования вертолёта (например, в виде отдельного режима отображения на экране штатного пилотажно-навигационного прибора, активируемого автоматически или вручную пилотом при входе вертолёта в режим авторотации).
В одном или более неограничивающих вариантах выполнения устройство согласно изобретению устройство индикации рекомендаций пилоту и параметров состояния вертолета при посадке в режиме авторотации (далее - устройство индикации) содержит по меньшей мере один процессор, такой как, не ограничиваясь, процессор общего назначения, микропроцессор и т.п., а также по меньшей мере одно запоминающее устройство, такое как, не ограничиваясь, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ) и т.п., которые служат для хранения программного обеспечения, под управлением которого устройство индикации осуществляет способ индикации рекомендаций пилоту и параметров состояния вертолета при посадке в режиме авторотации согласно изобретению, а также для хранения входных данных, обрабатываемых упомянутым по меньшей мере одним процессором для обеспечения индикации. Кроме того, в одном или более неограничивающих вариантах выполнения изобретения предусмотренный в составе устройства индикации дисплей параметров авторотации и/или отдельный дисплей, выполненный с возможностью отображения карты местности с обозначением рекомендуемых площадок для безопасного приземления, также могут содержать микропроцессор(ы), управляющие индикацией на упомянутых дисплеях.
На Фиг. 1 представлена принципиальная схема основных компонентов устройства индикации рекомендаций пилоту и параметров состояния вертолета при посадке в режиме авторотации (далее - устройство индикации), в котором реализовано настоящее изобретение. Позицией 200 указан дисплей параметров авторотации. Позицией 100 указан по меньшей мере один процессор, выполненный с возможностью обработки данных и формирования управляющих команд, выдаваемых на дисплей 200 параметров авторотации. Процессор 100 принимает данные от датчиков параметров полёта (обозначены на Фиг. 1 как Vгор, Vгор.з., Vверт., H, p, а также данные о текущем месте воздушного судна, например, от приёмника навигационной системы, обозначенного как GPS (следует отметить, что объём изобретения не ограничен конкретным типом навигационной системы, которая может быть использована в качестве источника данных о месте воздушного судна - по существу, это может быть по меньшей мере одна система из GPS, GNSS, GLONASS, Galileo, BeiDou и т.п.). Кроме того, следует отметить, что условно показанные на Фиг. 1 датчики не представляют собой исчерпывающий перечень датчиков, с которых процессор 100 может получать данные о параметрах полёта, параметрах окружающей среды и т.п.
Кроме того, процессор 100 устройства индикации соединён с памятью 120 рекомендуемых параметров и памятью 130 карт.
В качестве входных данных устройство индикации принимает по меньшей мере следующие данные, характеризующие параметры полёта:
- Vгор - горизонтальная скорость относительно воздушных масс;
- Vгор.з - горизонтальная скорость относительно земли;
- Vверт - вертикальная скорость относительно воздушных масс;
- Vверт.з - вертикальная скорость относительно земли;
- H - высота полёта в момент времени t относительно земли;
- Р - вес воздушного судна с учетом расхода топлива и загрузки;
- t - отсчёт времени после начала авторотации (начинается, например, в момент пропадания тяги двигателя);
- w - обороты винта (при необходимости);
- a - угол установки лопастей (при необходимости);
- tвозд - температура окружающего воздуха на высоте Н;
- р - фактическое давление на высоте Н.
Для приёма данных о параметрах полёта устройство индикации может быть соединено непосредственно с соответствующими датчиками, такими как, в качестве неограничивающего примера, приёмник воздушного давления (ПВД), датчик оборотов несущего винта, приёмник истинной воздушной скорости, датчик угла установки лопастей (при необходимости), датчик температуры воздуха и т.п., при этом для преобразования сигналов с датчиков в данные, подаваемые на вход процессора, может быть дополнительно предусмотрен по меньшей мере один аналого-цифровой преобразователь (АЦП). Другие данные, такие как вес воздушного судна, могут быть получены от штатных компонентов системы управления воздушным судном. В качестве альтернативы, упомянутые данные о параметрах полёта могут быть получены от штатных компонентов системы управления воздушным судном, например, посредством подключения устройства индикации согласно изобретению к соответствующей шине данных.
Процессор устройства индикации осуществляет обработку входных данных и на основании обработки, в частности на основании сравнения данных о параметрах полёта, таких как, в частности, Vгор, Vверт, Vверт.з, Vгор.з, H, w (при необходимости), a (при необходимости), указанные выше, с данными о рекомендуемых параметрах для авторотации в текущих условиях, которые могут вычисляться с учётом как данных, характеризующих текущие условия (t, tвозд, р и т.д.), так и данных, заданных производителем воздушного судна и/или введённых пилотом, например, перед началом полёта, и сохранённых в памяти устройства индикации, выдает на дисплей параметров авторотации индикацию пилоту для управления вертолетом по следующим параметрам:
- Горизонтальная скорость Vгор. - больше рекомендуемых значений, в норме, меньше рекомендуемых значений;
- Вертикальная скорость Vверт. - больше рекомендуемых значений, в норме, меньше рекомендуемых значений.
- Высота Н - вертолёт выше высоты «подрыва», Нприбл. - вертолёт приближается к высоте подрыва (приготовиться к подрыву), Нподр. - вертолет находится на высоте выполнения «подрыва».
Рекомендуемые параметры могут быть основаны на диапазонах значений соответствующих параметров, определённых производителем для данного типа воздушного судна, с учётом характеристик текущих условий и/или текущего состояния воздушного судна.
Следует отметить, что рекомендуемые значения указанных параметров могут представлять собой не строгие значения величин, а определённые интервалы в пределах некоторых допустимых диапазонов отклонений, рассчитанные заранее для данного типа воздушного судна с учётом его технических характеристик и сохранённые в соответствующей памяти устройства индикации. Кроме того, по меньшей мере некоторые из указанных рекомендуемых значений могут корректироваться или вычисляться с учётом фактических текущих условий и/или фактических параметров воздушного судна, введённых пилотом, например, перед началом полёта (например, веса воздушного судна или его нагрузки) или получаемых от различных датчиков на воздушном судне (например, остатка топлива) посредством соответствующего соединения и/или общей шины данных.
Алгоритмы обработки входных данных в процессоре 100 устройства индикации, на основании которых процессор 100 формирует управляющие сигналы, выдаваемые на дисплей 200 параметров авторотации для вывода соответствующей индикации аналогичны алгоритмам, обычно используемым для обработки данных в системах управления вертолётами для вывода соответствующей индикации параметров полёта на штатный пилотажно-навигационный прибор вертолёта. Указанные алгоритмы реализуются, в частности, с использованием соответствующего программного обеспечения, которое обрабатывает преобразованные в цифровой код сигналы с датчиков параметров полёта и данные из других источников (в частности, из памяти) и выдаёт управляющие команды на микропроцессор дисплея параметров авторотации. Примеры возможного программного обеспечения и самих указанных алгоритмов, применимых для реализации обработки данных по изобретению, известны специалистам в данной области техники.
На основе управляющих команд, формируемых упомянутым по меньшей мере одним процессором устройства индикации, дисплей параметров авторотации выдаёт визуальную и звуковую сигнализацию, обеспечивающую пилоту воздушного судна рекомендации по управлению воздушным судном, позволяющие пилоту осуществлять стабильный полёт в режиме авторотации и безопасную посадку путём указания пилоту приближения к высоте «подрыва», а также самой высоты «подрыва».
Обращаясь к Фиг. 2-3, цветовая индикация может быть реализована на дисплее параметров авторотации следующим образом:
- зелёный: Vгор., Vверт., Н в пределах рекомендуемых параметров для стабильного полёта в режиме авторотации в текущих условиях на текущий момент времени t;
- желтый v или желтый v: Vверт. меньше или, соответственно, больше рекомендуемых параметров;
- желтый < или Желтый >: Vгор. меньше или, соответственно, больше рекомендуемых параметров;
- красный < или красный >, красный v или красный Λ: указывает на значительное отклонение (в меньшую или большую сторону) Vгор. или Vверт., соответственно, от рекомендуемых параметров.
При этом в случае, если на дисплее параметров авторотации загорается горизонтальная скорость со знаком < или < < <, пилот даёт ручку от себя, увеличивая горизонтальную скорость, если > или > > >, то пилот дает ручку на себя, уменьшая горизонтальную скорость.
В случае, если на дисплее параметров авторотации отображается индикация Vверт. меньше рекомендуемых параметров, в виде, например, v или v v v, то пилот уменьшает шаг винта воздушного судна, опуская ручку «шаг-газ». Если Vверт. больше рекомендуемых параметров (^ или ^^^), пилот поднимает ручку «шаг-газ», увеличивая угол установки лопастей. Таким образом пилот воздушного судна регулирует параметры полёта воздушного судна на основании индикации на дисплее параметров авторотации, приводя параметры полёта к рекомендуемым значениям и поддерживая таким образом стабильный полёт в режиме авторотации.
Устройство индикации также указывает пилоту на приближение к высоте «подрыва» и достижение высоты «подрыва» для посадки в режиме авторотации с безопасной горизонтальной и вертикальной скоростью.
Индикация Нприбл. жёлтым цветом на дисплее параметров авторотации информирует пилота о приближении к высоте «подрыва» и необходимости приготовиться к «подрыву». При этом желтый цвет соответствующей индикации сопровождается постоянным звуковым сигналом.
Индикация Нподр. красным цветом указывает на достижение высоты «подрыва» для приземления со скоростью менее безопасной вертикальной скорости посадки Vверт.безоп.. Данная индикация на дисплее параметров авторотации также сопровождается прерывистым звуковым сигналом. По достижении Нподр. пилот поднимает ручку «шаг-газ» в соответствии с инструкцией по управлению воздушным судном, увеличивая угол установки лопастей для приземления с вертикальной скоростью не выше безопасной вертикальной скорости для приземления Vверт.безоп.
В случае, если при «подрыве» вертикальная скорость значительно снизилась, а текущая высота превышает необходимые значения, при этом обороты винта начинают существенно снижаться, вновь загорается желтый сигнал Нприбл., информирующий пилота о необходимости уменьшить угол установки винта, несколько опустив ручку «шаг-газ».
При этом при достижении вновь характеристик, требующих увеличения тяги авторотирующего винта, повторно загорается красный сигнал Нподр. до момента приземления со скоростью менее Vверт.безоп.
Кроме кодируемой цветом степени отклонения фактических параметров полёта от рекомендуемых значений для безопасной посадки в режиме авторотации, согласно изобретению на дисплее параметров авторотации также отображаются в цифровом и графическом виде рекомендации по выведению вертолета на безопасную траекторию посадки и рекомендованный курс на доступную площадку для наиболее безопасного приземления в данных условиях. Как видно на Фиг. 2 и 3, упомянутые рекомендации по выведению вертолёта на рекомендованный курс на доступную площадку для наиболее безопасного приземления могут отображаться в максимально наглядной и легко считываемой в условиях стресса форме, например, при помощи стрелки, изменяющей своё положение в зависимости от того, каким курсом летит воздушное судно (если воздушное судно следует курсом прямо на ближайшую доступную площадку для безопасной посадки, стрелка может располагаться прямо (т.е. быть обращена вертикально «вверх») на экране дисплея параметров авторотации; иначе стрелка может отклоняться от «прямого» направления вправо или влево в зависимости от того, в какую сторону необходимо совершить разворот воздушного судна, чтобы его курс совпал с курсом на ближайшую доступную площадку для безопасной посадки.
Кроме того, может отображаться дополнительная стрелка, непосредственно указывающая, в какую сторону (вправо или влево) необходимо совершить разворот, чтобы воздушное судно легло точно на курс на ближайшую доступную площадку для безопасной посадки. Индикация рекомендаций по выведению вертолёта на рекомендованный курс на доступную площадку может изменяться по мере пролёта воздушным судном соответствующих доступных площадок, то есть рекомендации могут «переключаться» на другие площадки, которые являются ближайшими с учётом изменения места воздушного судна в текущий момент, его высоты, вертикальной и горизонтальной скорости относительно земли, с учетом поправки на ветер.
Информация о доступных для безопасной посадки площадках с учётом текущего места воздушного судна вводится в процессор устройства индикации из памяти. При этом данная информация может быть загружена из внешних источников, например, с одного или более внешних серверов картографической информации и/или с любых возможных машиночитаемых носителей. Данная информация представляет собой карту района полётов, содержащую дополнительную разметку доступных площадок с соответствующими параметрами для каждой площадки, такими как, в качестве неограничивающего примера, максимальный разрешённый вес воздушного судна, которое может приземлиться на данной площадке, состояние поверхности данной площадки и т.п. Данная информация может быть получена из соответствующих геоинформационных систем и может обновляться с определённой периодичностью, в том числе корректироваться пользователями геоинформационных систем и/или сервисов полётных карт.
В зависимости от текущего места воздушного судна, устройство индикации может указывать на дисплее 200 параметров авторотации рекомендованный курс на доступную площадку для наиболее безопасного приземления в данных условиях. При этом к площадкам, отображаемым устройством индикации на топографической карте, также применяется цветовая индикация в зависимости от степени безопасности прогнозируемой посадки в режиме авторотации на ту или иную площадку. Степень безопасности может определяться, в качестве неограничивающего примера, свойствами поверхности соответствующей площадки, параметрами окружающей среды и т.п. При этом индикация рекомендованного курса на соответствующие площадки может также формироваться в зависимости от параметров окружающей среды, таких как, например, направление и скорость ветра на текущей высоте полёта и/или направление и скорость ветра у земли и т.п.
В одном или более неограничивающих вариантах выполнения, отображение кодируемой цветом степени отклонения параметров движения воздушного судна от рекомендуемых значений для безопасной посадки в режиме авторотации, а также рекомендации по выведению воздушного судна на безопасную траекторию посадки могут отображаться на одном дисплее 200 параметров авторотации вместе с рекомендованным курсом на доступную площадку для наиболее безопасного приземления в данных условиях и картой местности с указанными на ней площадками для приземления.
В других вариантах выполнения, отображение карты местности с рекомендуемыми площадками для безопасного приземления, кодируемыми цветом в зависимости от безопасности приземления на них, может быть реализовано на отдельном дисплее, предусмотренном в качестве дополнения к дисплею 200 параметров авторотации. Упомянутый отдельный дисплей может быть реализован на основе штатного дисплея воздушного судна, например в качестве режима отображения многофункционального дисплея штатного командно-пилотажного прибора вертолёта.
В предпочтительном варианте выполнения устройство индикации (или дисплей параметров авторотации) реализуется в виде отдельного устройства, устанавливаемого в кабине воздушного судна, такого как вертолёт, в качестве дополнительного оборудования. Однако в некоторых вариантах выполнения дисплей 200 параметров авторотации может быть реализован в виде отдельного режима отображения многофункционального дисплея штатного командно-пилотажного прибора вертолёта.
В одном или более вариантах выполнения изобретения режим авторотации может автоматически обнаруживаться устройством индикации в процессе отслеживания параметров полёта воздушного судна. В качестве неограничивающего примера, режим авторотации может обнаруживаться на основе значительного (больше заданного порогового значения) падения оборотов одного или более двигателей, которое не является характерным для штатных управляющих воздействий со стороны пилота или системы автоматического управления. В других примерах, режим авторотации может автоматически обнаруживаться на основании других характеристик параметров полёта, которые будут очевидны специалистам в данной области техники, или изменения таких характеристик. При этом дисплей параметров авторотации может быть активирован только при обнаружении режима авторотации, а вне режима авторотации он может быть деактивирован, чтобы не вводить в заблуждение и не перегружать информацией пилота воздушного судна.
В других вариантах выполнения дисплей 200 параметров авторотации или устройство индикации в целом могут быть активированы пилотом вручную при обнаружении вхождения в режим авторотации другими средствами.
Подробное описание вариантов выполнения изобретения, приведённое выше, не предназначено для ограничения или определения объёма правовой охраны настоящего изобретения. Все источники из уровня техники, приведённые и рассмотренные в настоящем документе, настоящим включены в данное описание путём ссылки, насколько это применимо. При том, что настоящее изобретение было описано и проиллюстрировано на различных вариантах его выполнения, специалистам в данной области техники следует понимать, что в его форму и конкретные детали могут быть внесены различные изменения, не выходящие за рамки объёма настоящего изобретения, который определяется только нижеприведённой формулой изобретения и её эквивалентами.
Группа изобретений относится к авиационным приборам, и в частности к пилотажно-навигационным приборам воздушного судна, способного к авторотации, такого как вертолёт, автожир, квадрокоптер или мультикоптер. Способ индикации рекомендаций пилоту и параметров состояния воздушного судна, способного к авторотации, при посадке в режиме авторотации включает в себя: отображение текущей высоты полета, отображение высоты «подрыва» при авторотации. При посадке в режиме авторотации на дисплее параметров авторотации отображается кодируемая цветом степень отклонения горизонтальной и вертикальной скорости движения вертолёта от рекомендуемых значений для безопасной посадки в режиме авторотации, а также отображаются в цифровом и графическом виде рекомендации по выведению воздушного судна на безопасную траекторию посадки и рекомендованный курс на доступную площадку для наиболее безопасного приземления в данных условиях. Также предложено устройство индикации, реализующее данный способ. Технический результат состоит в повышении безопасности управления воздушным судном, способным к авторотации. 2 н. и 11 з.п. ф-лы, 3 ил.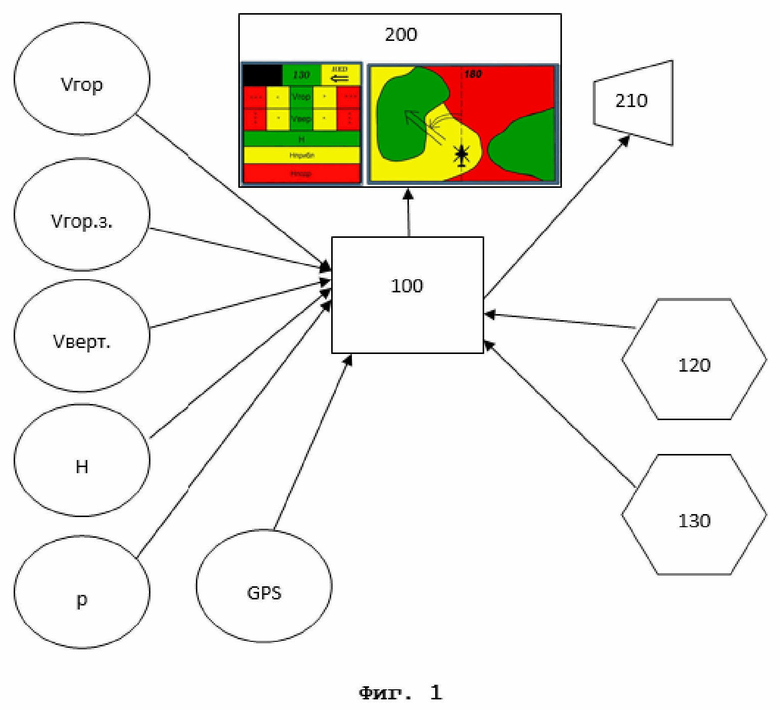
1. Способ индикации рекомендаций пилоту и параметров состояния воздушного судна, способного к авторотации, при посадке в режиме авторотации, включающий в себя:
отображение текущей высоты полета,
отображение высоты «подрыва» при авторотации,
отличающийся тем, что при посадке в режиме авторотации на дисплее параметров авторотации отображается кодируемая цветом степень отклонения горизонтальной и вертикальной скорости движения вертолёта от рекомендуемых значений для безопасной посадки в режиме авторотации, а также отображаются в цифровом и графическом виде рекомендации по выведению воздушного судна на безопасную траекторию посадки и рекомендованный курс на доступную площадку для наиболее безопасного приземления в данных условиях.
2. Способ по п.1, в котором индикация рекомендаций по выведению воздушного судна на безопасную траекторию осуществляется символами, цвет которых определяется величиной отклонения текущих параметров состояния воздушного судна от их рекомендуемых значений.
3. Способ по п.1, в котором рекомендованный курс на площадку для безопасного приземления отображается на дисплее параметров авторотации или на отдельном дисплее с картой местности.
4. Способ по п.1, в котором отображаемое значение высоты «подрыва» при авторотации кодируется цветом в зависимости от разности между текущей высотой полета и высотой «подрыва» при авторотации.
5. Способ по п.3, в котором на отдельном дисплее с картой местности отображаются рекомендуемые площадки для безопасного приземления, кодируемые цветом в зависимости от безопасности приземления на них.
6. Устройство индикации рекомендаций пилоту и параметров состояния воздушного судна, способного к авторотации, при посадке в режиме авторотации, включающее в себя:
по меньшей мере один процессор, выполненный с возможностью обработки данных о параметрах полёта, параметрах окружающей среды и выдачи рекомендаций на дисплей параметров авторотации; и
дисплей параметров авторотации, выполненный с возможностью отображения кодируемой цветом степени отклонения горизонтальной и вертикальной скорости движения вертолёта от рекомендуемых значений для безопасной посадки в режиме авторотации, а также отображения в цифровом и графическом виде рекомендаций по выведению воздушного судна на безопасную траекторию посадки и рекомендованного курса на доступную площадку для наиболее безопасного приземления в данных условиях.
7. Устройство по п.6, дополнительно выполненное с возможностью отображения текущей высоты полета и отображения высоты «подрыва» при авторотации.
8. Устройство по п.6, в котором дисплей параметров авторотации выполнен в виде отдельного дисплея.
9. Устройство по п.6, в котором дисплей параметров авторотации является частью штатного пилотажно-навигационного прибора воздушного судна.
10. Устройство по п.6, выполненное с возможностью индикации рекомендаций по выведению воздушного судна на безопасную траекторию посредством символов, цвет которых определяется величиной отклонения текущих параметров состояния вертолета от их рекомендуемых значений.
11. Устройство по п.6, выполненное с возможностью отображения рекомендованного курса на площадку для безопасного приземления на дисплее параметров авторотации или на отдельном дисплее с картой местности.
12. Устройство по п.6, в котором отображаемое значение высоты «подрыва» при авторотации кодируется цветом в зависимости от разности между текущей высотой полета и высотой «подрыва» при авторотации.
13. Устройство по п.11, выполненное с возможностью отображения на отдельном дисплее с картой местности рекомендуемых площадок для безопасного приземления, кодируемых цветом в зависимости от безопасности приземления на них.
| US 9242727 B1, 26.01.2016 | |||
| WO 2006076647 A2, 20.07.2006 | |||
| СПОСОБ ПОСАДКИ ВЕРТОЛЁТА В РЕЖИМЕ АВТОРОТАЦИИ | 2019 |
|
RU2721028C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ВЕРТОЛЁТА | 2022 |
|
RU2789499C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КУРСА | 2023 |
|
RU2809659C1 |
| WO 2017187078 A1, 02.11.2017. | |||

