Изобретение относится к области авиационной техники, а именно к бортовым системам предупреждения и предотвращения столкновений летательных аппаратов в воздушном пространстве, сигнализирующим пилоту об угрозе такого столкновения.
Известна бортовая система предупреждения столкновений (СПС) воздушного судна (ВС) TCAS II (TCAS 2000), которая входит в состав штатного бортового оборудования самолетов фирм Boeing, Airbus, Туполев, Ильюшин и др. В состав указанных систем входит процессор, индикатор воздушной обстановки, сигналов предупреждения об угрозе столкновения и команд управления. Индикатор воздушной обстановки представляет собой дисплей, на котором отображают круговую кольцевую шкалу вертикальной скорости собственного ВС, диапазон разрешенных и запрещенных вертикальных скоростей и стрелку-указатель текущего значения вертикальной скорости. В центральной части экрана расположен символ собственного ВС, а также подвижные символы других участников воздушного движения, в том числе представляющие угрозу столкновения, причем символы различаются цветом и формой согласно классификации угроз. Процессор СПС вырабатывает значения вертикальной скорости, выдерживание которой обеспечивает расхождение с угрозой по высоте с разницей не менее минимально допустимой (см. Автоматизированные системы управления воздушным движением: Новые информационные технологии в авиации: Учеб. пособие. / Под ред. С.Г.Пятко и А.И.Красова. - СПб.: Политехника, 2004, стр.246-254; Система отображения воздушной обстановки и предотвращения столкновений самолетов в воздухе TCAS/ACAS II. Руководство для летчиков, Honeywell Inc., www.sisadminov.net/tcas/docs/piloguide.doc).
Известен способ отображения информации о воздушном движении вблизи собственного ВС по патенту № ЕР 0493822 А1, МПК5 G01S 7/20, опубл. 15.09.1999 (v3.espacenet.com).
Известный способ заключается в том, что на экране внутрикабинного дисплея изображают неподвижный символ собственного ВС, расположенный примерно в центре экрана, а также подвижные символы ВС, находящиеся в отображаемой зоне воздушного пространства, причем указанные символы имеют изменяемые размер, который указывает уровень угрозы.
Данный аналог имеет ряд недостатков. Пилоту представляется информация о текущем взаимном положении угрожающего ВС по отношению к собственному ВС, причем в проекции на горизонтальную плоскость, что не позволяет пилоту полностью оценить степень угрозы. Другим недостатком является то, что визуальная информация о взаимном положении угрожающего и собственного ВС является неполной, из-за чего пилот испытывает трудности в контролировании выполнения команды вертикального маневра, что может служить причиной неадекватных действий экипажа, которые, как показывает опыт эксплуатации СПС, приводят к предпосылкам к тяжелым летным происшествиям и авиакатастрофам.
Наиболее близким по своей технической сущности к заявленному является метод уклонения от столкновений собственного ВС по патенту № WO 2006/104776 А1, МПК7 G01S 13/93, опубл. 05.10.2006 (v3.espacenet.com), включающий в себя прием информации по уклонению от столкновений с одной или более целями, селекции одной или более угроз, отображения символов на экране дисплея системы ТСAS. Дисплей включает индикатор вертикальной обстановки, главный навигационный дисплей, индикатор горизонтальной обстановки, отображение включает изображение поперечного положения относительно своего ВС, индикацию движения взаимосвязанных ВС в вертикальной плоскости, а также индикацию уровня угрозы, причем символы отличаются размером и цветом в зависимости от идентифицированного уровня угрозы.
Способу-прототипу присущи следующие недостатки: отображения воздушной обстановки в вертикальной и горизонтальной плоскостях на различных индикаторах рассеивают внимание пилота из-за неизбежной избыточности предоставляемой ему информации. В связи с этим у пилота не складывается цельной картины адекватной реальной воздушной обстановки. Наиболее существенный недостаток состоит в отсутствии прогноза взаимного расположения угрожающих ВС по отношению к собственному ВС, что существенно затрудняет управление маневром уклонения и контроль за его исполнением.
Заявленное техническое решение расширяет арсенал средств данного предназначения.
Кроме того, целью изобретения является разработка способа индикации угроз и команд предупреждения столкновений в воздушном пространстве, обеспечивающего отображение в наглядной, легко воспринимаемой форме графической информации об относительном (взаимном) расположении угрожающего и собственного ВС и прогнозируемого положения угрожающего ВС в момент наибольшего сближения в трехмерном пространстве, а также командной и дополнительной информации.
Поставленная цель достигается тем, что в известном способе индикации пространственного положения угрожающих воздушных судов и команд управления на экране внутрикабинного дисплея собственного воздушного судна, оборудованного системой предупреждения столкновений в воздушном пространстве, в которой на основании данных от датчиков и измерителей собственных координат и параметрах движения, а также по данным о координатах и параметрах движения воздушного судна, представляющего угрозу столкновения, вычисляют интервал времени до момента наибольшего сближения по дальности, расстояние между угрожающим и собственным воздушными судами и прогнозируемую разность высот в указанный момент времени наибольшего сближения, относительные координаты, а также разность высот между ними в текущий момент времени. На экране внутрикабинного индикатора отображают неподвижный символ собственного воздушного судна и подвижные символы других участников воздушного движения, которые находятся в отображаемой области воздушного пространства, а также команды управления изменением высоты и дополнительную информацию, которая содержит данные о параметрах движения угрожающего воздушного судна. Дополнительно во время выполнения полета задают форму и размеры зоны столкновения и зоны управления в горизонтальном и вертикальном направлении. На экране дисплея отображают прогнозируемую траекторию собственного ВС, исходящую из указанного неподвижного символа, конечная точка которой соответствует моменту наибольшего сближения с угрожающим ВС, строят изображение зоны столкновения в момент наибольшего сближения с угрожающим ВС, на котором изображают символ прогнозируемого положения угрожающего ВС в момент наибольшего сближения, а указанный символ соединяют линией с символом, который отображает на экране пространственное положение угрожающего ВС в текущий момент времени.
Новым также является то, что экранные координаты точек сечения зоны столкновения и положения угрожающего ВС вычисляют в виде нелинейных функций реальных координат, причем указанное сечение строят в нелинейной перспективной системе реального трехмерного пространства.
На перспективном трехмерном изображении отрисовывают линии динамически изменяющихся границ зоны столкновения (ЗС), а также зоны управления (ЗУ).
Команды управления изменением высоты отображают на экране индикатора в виде командного индекса, а также выводят дополнительную информацию, которая содержит данные о параметрах движения угрожающего воздушного судна на шкалах или цифровых табло.
При появлении в зоне столкновения двух или более угрожающих ВС для каждого из них отображают прогнозируемое положение ЗС, которое соответствует времени наибольшего сближения с каждой из указанных угроз, причем отображают вычисленное значение командной вертикальной скорости, обеспечивающее выполнение маневра уклонения от всей совокупности угроз.
Процессор, подключенный к дисплею, вырабатывает электрические сигналы, которые формируют на экране дисплея изображение тогда и только тогда, когда в ЗС или в ЗУ находится хотя бы одно угрожающее ВС.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупность признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Заявленный способ поясняется чертежами.
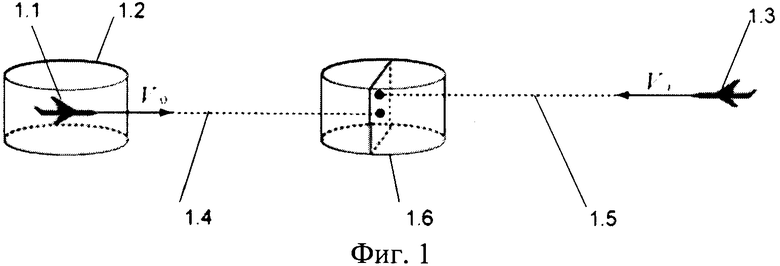
Фиг.1 поясняет расположение в пространстве собственного ВС, а также ВС, представляющего угрозу столкновения.
Фиг.2 поясняет прогноз наибольшего сближения по дальности.
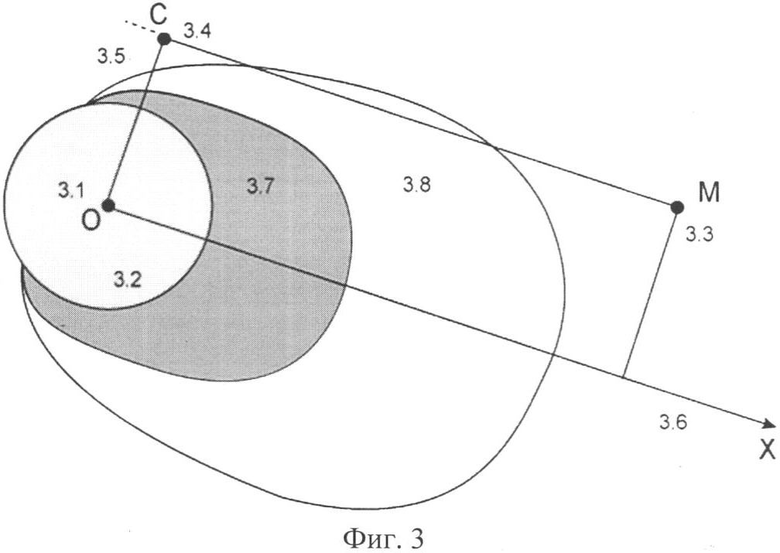
Фиг.3 поясняет структуру зоны столкновения и зоны управления.
Фиг.4 - вид экрана дисплея при входе угрожающего ВС в зону управления.
Фиг.5 - вид экрана дисплея в момент наибольшего сближения по дальности.
В условиях непрерывно возрастающей интенсивности полетов, увеличения скорости полетов и пассажировместимости ВС, а также применения новой практики полетов по свободным траекториям обостряется противоречие между требованиями высокого уровня безопасности полетов и техническими решениями (возможностями) бортового приборного оборудования, предназначенного для обеспечения безопасности полетов.
Известные пути решения этой проблемы основываются на включении в состав бортового оборудования СПС, выполняющих следующие операции: сбор информации о воздушной обстановке в некоторой ограниченной области воздушного пространства, селекцию потенциальных угроз, прогнозирование их движения, вычисление параметров опасного сближения при входе угрожающего ВС в пределы зоны внимания, выдачу экипажу предупреждений и с момента входа в зону управления формирование команд на выполнение маневра уклонения в вертикальной плоскости. Однако они не позволяют экипажу в полной мере оценить опасность сложившейся ситуации и в условиях дефицита времени действовать четко и адекватно.
Возможное направление решения возникшего противоречия может быть найдено путем отображения прогноза развития сложившейся конфликтной ситуации.
Возможность реализации заявленного способа с достижением указанного технического результата объясняется следующим образом.
По известным алгоритмам производят селекцию ВС в заданной области воздушного пространства, выделяют потенциальную угрозу, рассчитывают для нее параметры зоны внимания и ЗУ, причем с момента входа угрожающего ВС в ЗУ вычисляют команду управления, а именно величину вертикальной скорости, которая обеспечивает выполнение маневра уклонения.
На фиг.1 показано положение в пространстве собственного ВС 1.1 в текущий момент времени, вокруг которого строят ЗС 1.2, положение угрожающего ВС 1.3, прогнозируемые траектории собственного ВС 1.4 и угрожающего ВС 1.5, прогнозируемое положение ЗС 1.6 в момент наибольшего сближения по дальности с угрожающим ВС.
Зона столкновения представляет собой трехмерную зону пространства, построенную вокруг собственного ВС, попадание в которую другого ВС недопустимо. Форму указанной зоны выбирают из практических соображений. Обычно она имеет форму эллипсоида или цилиндра, причем их размеры представляют собой дистанцию сближения по дальности и по высоте.
С собственным ВС связывают подвижную систему координат Oxyz, ось Ох которой направлена по вектору путевой скорости собственного ВС, ось Oz расположена горизонтально, а ось Оу направлена вертикально вверх.
Фиг.2 иллюстрирует прогноз наибольшего сближения по дальности в предположении, что собственное и угрожающее ВС двигаются прямолинейно. На фиг.2 показаны собственное ВС (т.О) 2.1, вокруг которого указана граница ЗС 2.2 в горизонтальной плоскости, угрожающее ВС (т.М) 2.3, векторы скорости собственного  и угрожающего ВС
и угрожающего ВС  , точка наибольшего сближения по дальности (т.С) 2.4 и дистанция наибольшего сближения Dc 2.5, текущая дальность Dоi 2.7 и положение главной оси ОХ 2.6, параллельной вектору скорости сближения.
, точка наибольшего сближения по дальности (т.С) 2.4 и дистанция наибольшего сближения Dc 2.5, текущая дальность Dоi 2.7 и положение главной оси ОХ 2.6, параллельной вектору скорости сближения.
Используя указанные построения, находят численные параметры сближения, а именно интервал времени τс до момента наибольшего сближения по дальности и дистанцию сближения Dc. Для этого предварительно вычисляют относительные координаты xoi, zoi, составляющие относительные скорости Vxoi, Vzoi, а также модуль скорости сближения Voi.
Указанные параметры сближения вычисляют по формулам:
 ,
,
 .
.
В случае, когда ВС двигаются по криволинейным траекториям, для вычисления указанных параметров сближения составляют и решают соответствующие нелинейные уравнения.
Прогнозируемые координаты в момент наибольшего сближения по дальности вычисляют по известным формулам, в которые входят текущие координаты и параметры движения, а также время до момента наибольшего сближения по дальности.
На фиг.3 показана структура ЗС и ЗУ в проекции на горизонтальную плоскость.
Нумерация элементов 3.1-3.6 соответствует нумерации тех же элементов на фиг.2.
Форма и размер ЗУ 3.7 и зоны внимания 3.8 зависят от величины скорости сближения и от заданного времени выдачи предупреждений об угрозе столкновений. Продольная ось указанных зон совпадает с направлением главной оси ОХ, а ширину зон в поперечном направлении рассчитывают в зависимости от времени, оставшегося до момента наибольшего сближения. Указанное расширение учитывает возможность неожиданного маневрирования угрожающего ВС в горизонтальной плоскости.
В соответствии с заявленной целью изобретения техническое предложение заключается в способе представления на экране индикатора в наглядной и легко воспринимаемой пилотом форме графических информационных объектов о взаимном расположении угрожающего и собственного ВС и прогнозируемого положения угрожающего ВС в момент наибольшего сближения в трехмерном пространстве, а также командной и дополнительной информации.
Для формирования двумерного изображения на экране индикатора вводят систему экранных координат Oνu, начало которой располагают в центре неподвижного символа собственного ВС, ось Oν расположена по вертикальной оси экрана, а ось Оu - по горизонтальной. Каждая наблюдаемая точка М реального трехмерного пространства с координатами (х, у, z) имеет на плоскости экрана свое изображение, а именно точку Р с координатами (u, ν). Указанные экранные координаты вычисляют по формулам:
u=mzz,
ν=mxx+myy,
причем масштабные коэффициенты mx, my, mz нелинейно изменяют с изменением удаления х, а именно убывают по мере увеличения координаты х.
При построении изображений на экране за зрительную или оптическую ось принимают ось Ох. Указанные выше формулы описывают систему перспектив, а именно проективное преобразование объектов реального трехмерного пространства в плоское изображение на экране дисплея.
На фиг.4 показан экран индикатора, на котором отображают неподвижный символ собственного ВС 4.1, подвижные символы текущего 4.2 и прогнозируемого 4.3 положения угрожающего ВС в момент наибольшего сближения, прогнозируемую траекторию собственного ВС 4.4, исходящую из центра неподвижного символа 4.1, конечная точка которой соответствует моменту наибольшего сближения с угрожающим ВС 4.5. Строят изображение ЗС в момент наибольшего сближения с угрожающим ВС по дальности. Один из вариантов изображения трехмерной ЗС, имеющей форму цилиндра, показан на фиг.4, где изображают вертикальное сечение указанной зоны 4.6 с центром в точке 4.5, а также горизонтальное сечение 4.7, положение которого задают путем вычисления прогнозируемой разности высот в момент наибольшего сближения. На фиг.4 также показаны динамически изменяющиеся границы поперечного сечения ЗС 4.8 и ЗУ 4.9, указывают горизонтальный размер ЗС в километрах 4.10.
Индикация управляющих сигналов может быть выполнена различным образом, в частности, как показано на фиг.4. На правой вертикальной оцифрованной шкале вертикальной скорости отображают команду, а именно вычисленную величину вертикальной скорости в виде индекса на границе между интервалами допустимых и недопустимых величин вертикальной скорости 4.11. Шкала снабжается также индексом текущей вертикальной скорости 4.12.
На левой вертикальной оцифрованной шкале высот отображают диапазон допустимых 4.13 и недопустимых 4.14 разностей высот между угрожающим ВС и собственным ВС, а также индекс 4.15, показывающий текущую высоту собственного ВС.
На фиг.5 приведено изображение на экране индикатора в момент наибольшего сближения.
В случае обнаружения в ЗС одновременно двух или более угрожающих ВС для каждого из них отображают прогнозируемое положение зоны столкновения, которое соответствует времени наибольшего сближения с каждой из указанных угроз. При этом командное значение вертикальной скорости вычисляют таким, которое обеспечивает выполнение маневра уклонения от всей совокупности угроз.
Для реализации предлагаемого способа индикации процессор, соединенный с дисплеем, по вычисленным параметрам генерирует информационные и управляющие сигналы, причем изображение на экране в соответствии с данным техническим предложением формируется на интервале времени от первого момента входа угрожающего ВС и до момента наибольшего сближения.
Таким образом, в соответствии с предлагаемым способом индикации угроз и команд предупреждения столкновений в воздушном пространстве на экране внутрикабинного дисплея представляется в наиболее наглядной и легко воспринимаемой форме максимально полная динамическая информация о взаимном расположении угрожающего и собственного ВС в текущий момент времени, прогнозируемое положение угрозы в трехмерном пространстве в момент наибольшего сближения, а также команды и дополнительная информация, необходимая для своевременного и точного выполнения вертикального маневра уклонения и оперативного контроля за ним.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С НАЗЕМНЫМИ ПРЕПЯТСТВИЯМИ | 2009 |
|
RU2397549C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 1998 |
|
RU2134910C1 |
| Способ предупреждения столкновений воздушных судов при полетах в зонах пониженной плотности воздушного движения и отсутствии диспетчерской поддержки | 2016 |
|
RU2609152C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВОЗДУШНОГО СУДНА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2005 |
|
RU2297047C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2003 |
|
RU2236707C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СИСТЕМА И СПОСОБ ДЛЯ РАСПОЗНАВАНИЯ МАНЕВРОВ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА В КОНФЛИКТНЫХ СИТУАЦИЯХ | 2007 |
|
RU2461889C2 |
| Способ и устройство предотвращения опасного сближения воздушных судов с использованием параллельного смещения | 2022 |
|
RU2785811C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |



Изобретение относится к авиации и предназначено для использования при реализации предупреждения и предотвращения столкновений воздушных судов (ВС) с сигнализацией пилоту об угрозе такого столкновения. На экране внутрикабинного индикатора отображают информацию о текущем взаимном расположении собственного ВС и ВС-нарушителя, прогнозируемые траектории движения собственного ВС и ВС-нарушителя в момент наибольшего сближения по дальности, точку наибольшего сближения, прогнозируемое положение зоны столкновения и зоны управления. Указанное изображение строят в нелинейной перспективной системе реального трехмерного пространства. Также на экране отображают командные сигналы и дополнительную информацию о параметрах движения ВС. Изобретение обеспечивает отображение в наглядной, легко воспринимаемой форме графической информации об относительном расположении угрожающего ВС и собственного ВС и прогнозе развития сложившейся конфликтной ситуации. 5 з.п. ф-лы, 5 ил.
1. Способ индикации пространственного положения угрожающих воздушных судов и команд управления на экране внутрикабинного дисплея собственного воздушного судна, оборудованного системой предупреждения столкновений в воздушном пространстве, в которой на основании данных от датчиков и измерителей собственных координат и параметров движения, а также по данным о координатах и параметрах движения воздушного судна, представляющего угрозу столкновения, вычисляют интервал времени до момента наибольшего сближения по дальности, расстояние между угрожающим и собственным воздушными судами и прогнозируемую разность высот в указанный момент времени наибольшего сближения, относительные координаты, а также разность высот между ними в текущий момент времени, заключающийся в том, что на экране внутрикабинного индикатора отображают неподвижный символ собственного воздушного судна и подвижные символы других участников воздушного движения, которые находятся в отображаемой области воздушного пространства, а также команды управления изменением высоты и дополнительную информацию, которая содержит данные о параметрах движения угрожающего воздушного судна, отличающийся тем, что задают форму и размеры зоны столкновения и зоны управления в горизонтальном и вертикальном направлении, на экране дисплея отображают прогнозируемую траекторию собственного воздушного судна, исходящую из указанного неподвижного символа, конечная точка которой соответствует моменту наибольшего сближения с угрожающим воздушным судном, строят изображение зоны столкновения в момент наибольшего сближения с угрожающим воздушным судном, на котором изображают символ прогнозируемого положения угрожающего воздушного судна в момент наибольшего сближения, и указанный символ соединяют линией с символом, который отображает на экране пространственное положение угрожающего воздушного судна в текущий момент времени.
2. Способ по п.1, отличающийся тем, что экранные координаты точек сечения зоны столкновения и положения угрожающего воздушного судна вычисляют в виде нелинейных функций реальных координат, причем указанное сечение строят в нелинейной перспективной системе реального трехмерного пространства.
3. Способ по п.1, отличающийся тем, что на перспективном изображении рисуют линии динамически изменяющихся границ зоны столкновения, а также зоны управления.
4. Способ по п.1, отличающийся тем, что команды управления изменением высоты отображают на экране индикатора в виде командного индекса, а также выводят дополнительную информацию, которая содержит данные о параметрах движения угрожающего воздушного судна, на шкалах или цифровых табло.
5. Способ по п.1, отличающийся тем, что при появлении в зоне столкновения двух или более угрожающих воздушных судов для каждого из них отображают прогнозируемое положение зоны столкновения, которое соответствует времени наибольшего сближения с каждой из указанных угроз, причем отображают вычисленное значение командной вертикальной скорости, которое обеспечивает выполнение маневра уклонения от всей совокупности угроз.
6. Способ по п.1, отличающийся тем, что подключенным к дисплею процессором вырабатывают электрические сигналы, которые формируют на экране дисплея изображение тогда, когда в зоне управления или в зоне столкновения находится хотя бы одно угрожающее воздушное судно.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Предохранительное устройство для защиты рабочей машины от столкновения с обслуживаемым объектом | 1973 |
|
SU493822A1 |
| ИНДИКАТОР АВТОНОМНОЙ СИСТЕМЫ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2318244C1 |
| УСТРОЙСТВО ИНДИКАЦИИ ОПАСНОСТИ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2131622C1 |

