Изобретение относится к технике для приготовления смесей из сыпучих, вязких, пастообразных компонентов и может применяться в химической и пищевой промышленности, производстве строительных материалов.
Известен смеситель, содержащий емкость с гибким рабочим элементом /RU №2254909 С2, B01F 9/02, В28С 5/20, 04.07.03. Тамбовский государственный технический университет, В.Ф.Першин, А.Г.Ткачев, М.В.Стрыгин /.
Недостатки указанного смесителя: смеситель периодического действия (загрузка новой партии компонентов смеси возможна только после полного прекращения работы механизма), что существенно снижает возможность его использования в автоматических производственных циклах; для рабочего процесса необходимо использование двух приводов, что существенно усложняет конструкцию и увеличивает энергозатраты.
Наиболее близким к предлагаемому изобретению является смеситель фирмы «Fries Sohn» с бипланетарным приводом, образующим сложное циклоидальное движение рабочих органов /патент №1164378, ФРГ, 1964/.
Главным недостатком указанного смесителя является наличие трех независимых приводов.
Задача изобретения - повышение качества процесса перемешивания, уменьшение энергозатрат, автоматизация производственных процессов.
Сущность изобретения: смеситель, содержащий неподвижный корпус, люки для погрузки и выгрузки, бипланетарный привод, электродвигатель, дополнительно содержит вращающуюся емкость с тремя прорезями, расположенными вдоль образующих цилиндрической поверхности емкости под углом в 120° относительно друг друга, гибкий рабочий орган, соединенный одним концом с осью сателлита бипланетарного привода, а другим - через шарнир с корпусом, два жестких рабочих органа, вспомогательный шнек, причем размеры сателлитов в бипланетарном приводе подобраны таким образом, чтобы обеспечить зазор между наружной поверхностью жестких рабочих органов и гибким рабочим элементом.
Устройство представлено на чертежах.
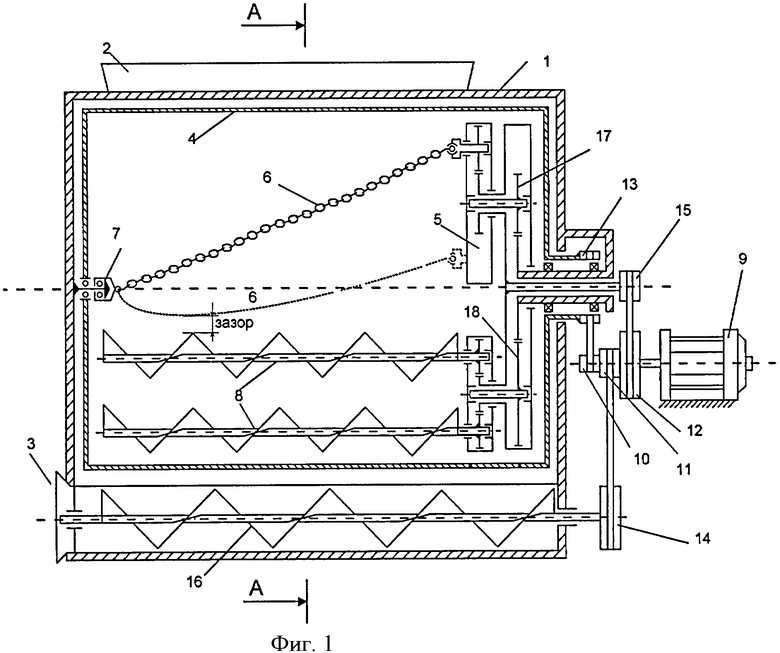
Фиг.1 - общий вид смесителя.
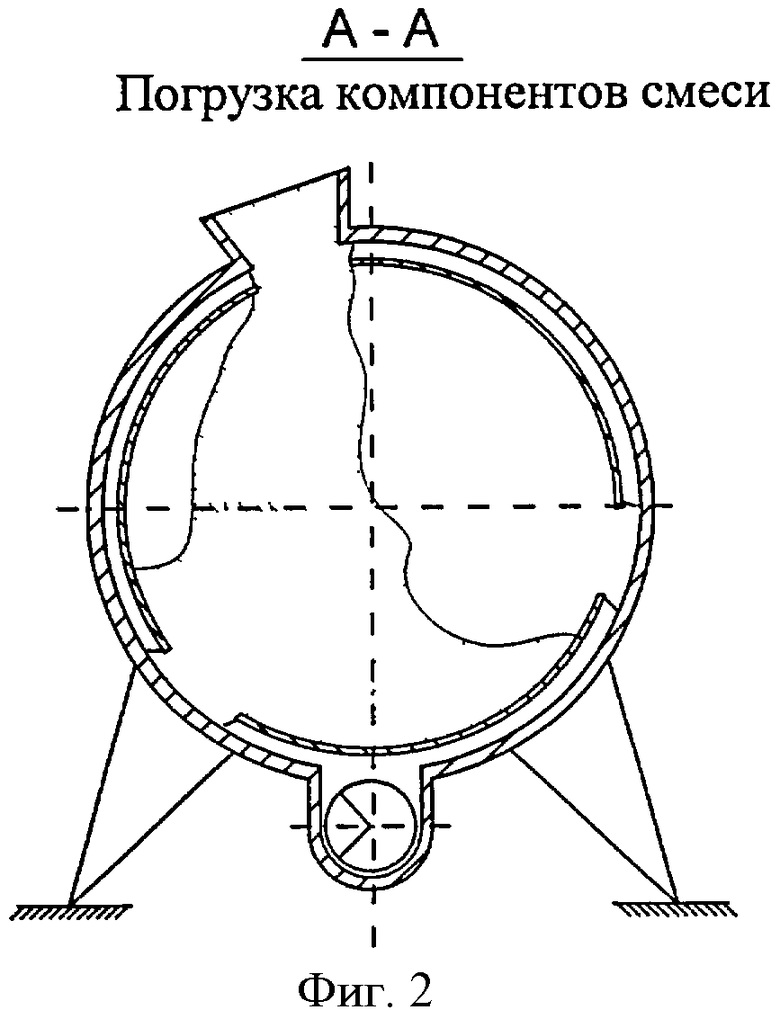
Фиг.2 - погрузка компонентов смеси.
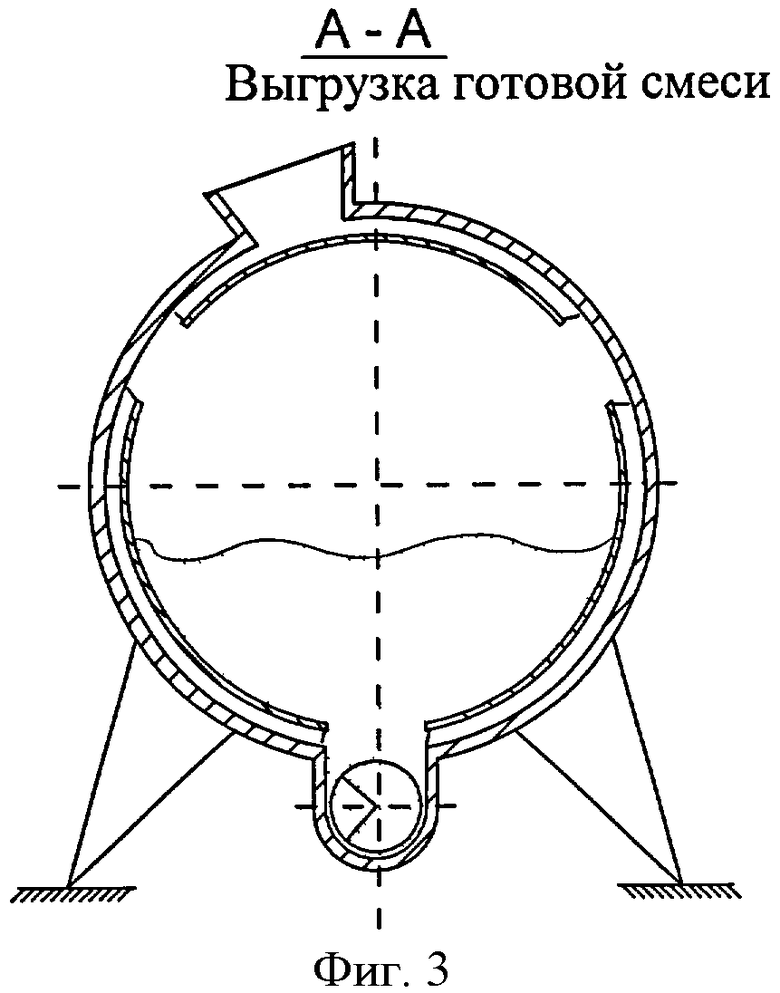
Фиг.3 - выгрузка готовой смеси.
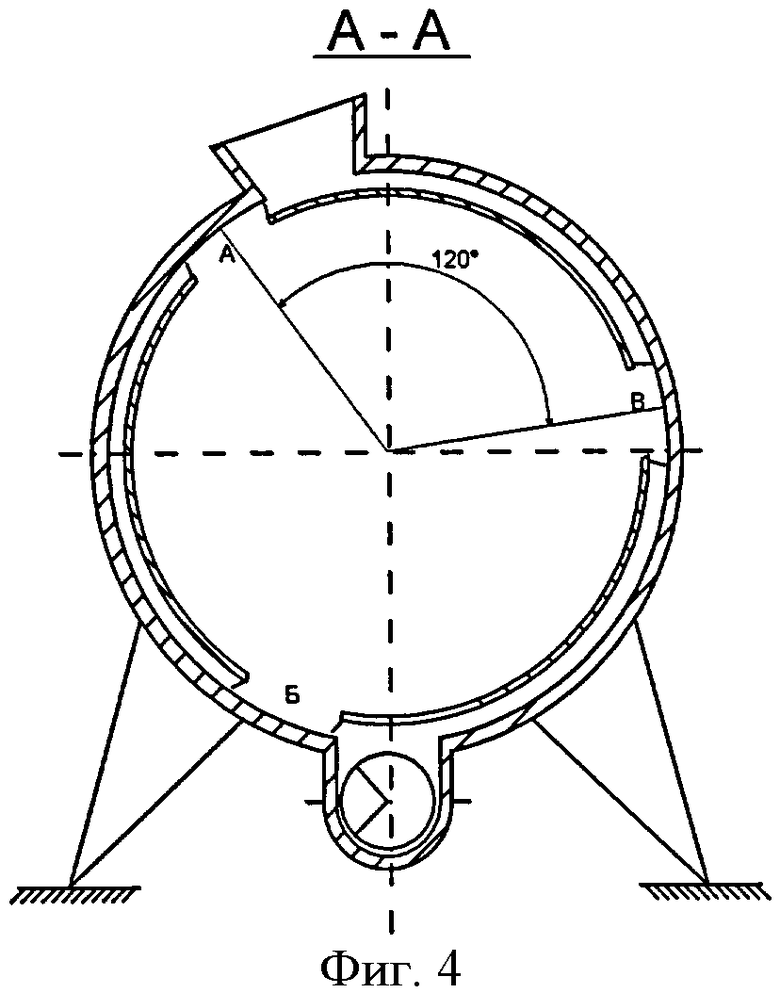
Фиг.4 - расположение люка погрузки и прорезей емкости относительно друг друга.
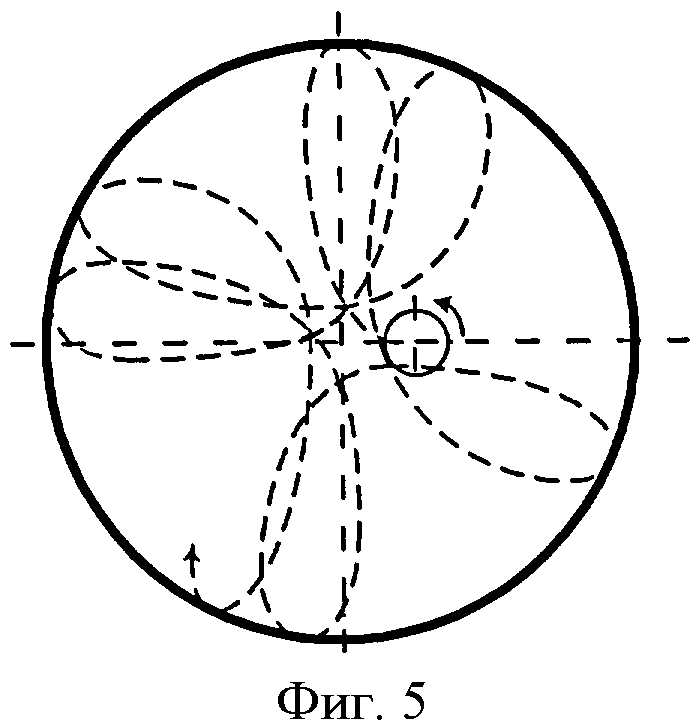
Фиг.5 - Циклоидальная траектория движения рабочих органов.
Смеситель состоит (Фиг.1) из неподвижного корпуса 1, люка для погрузки компонентов смеси 2, люка для выгрузки готовой смеси 3, вращающейся цилиндрической емкости 4 с тремя прорезями, расположенными вдоль образующих цилиндрической поверхности емкости 4 под углом в 120° относительно друг друга, бипланетарного привода 5, гибкого рабочего органа в виде металлической цепи 6, соединенной одним концом с осью сателлита бипланетарного привода 5, а другим - через шарнир 7 с корпусом 1, двух жестких рабочих органов 8. Электродвигатель 9 на валу имеет 3 шкива 10, 11 и 12, соединенных клиноременной передачей со шкивами 13, 14 и 15 соответственно. Шкив 14 передает вращательное движение от привода к вспомогательному шнеку 16. Бипланетарный привод 5 содержит разные по диаметру сателлиты 17 и 18.
Смеситель работает следующим образом.
Движение от электродвигателя 9 передается через клиноременную или иную передачу от шкива 10 к шкиву 13. Тем самым приводится в движение емкость 4, которая, заняв положение, соответствующее погрузке (одна из трех прорезей располагается под люком для погрузки 2), начнет заполняться компонентами необходимой смеси (Фиг.2).
Бипланетарный привод 5, приводимый в движение через шкив 12 и шкив 15, сообщает циклоидальную траекторию движения основному рабочему органу - гибкому элементу, а именно металлической цепи 6, соединенной другим концом с корпусом 1 через шарнир 7, который обеспечивает свободное вращение цепи 6 относительно оси ее вращения. Выбор в качестве основного рабочего органа гибкого элемента вызван возможностью установки его таким образом, чтобы происходило постоянное изменение расстояния между местами закрепления его концов, способствующее постоянному изменению формы рабочего органа. Данный факт позволяет исключить периодичность в процессе смешивания, так как траектория движения точек гибкого рабочего органа будет непредсказуемой, зависеть не только от бипланетарного привода, но и от плотности смешиваемых компонентов. Выбор в качестве такого элемента металлической цепи позволяет добавить к общему процессу смешивания фактор перфорации перемешиваемой массы через отверстия в звеньях цепи.
Одновременно с гибким рабочим элементом 6 во вращение приходят вспомогательные жесткие рабочие органы - два шнека 8. Их предназначение заключается в максимальном использовании потенциала бипланетарного привода 5 и дополнительном перемешивании компонентов смеси. Диаметры сателлитов 17 и 18 бипланетарного привода 5 выбираются таким образом, чтобы обеспечить зазор (см. Фиг.1) между жесткими рабочими органами 8 и гибким рабочим элементом 6 в том его положении, когда он максимально приближен к жестким рабочим органам 8. Зазор является необходимым условием работоспособности смесителя, при котором траектории движения гибкого рабочего элемента 6 и жестких рабочих органов 8 не будут пересекаться. Таким образом, различные диаметры сателлитов 17 и 18 дают фактор различной скорости вращения гибкого рабочего органа 6 и жестких рабочих органов 8.
Когда емкость 4 займет положение, при котором одна из трех прорезей окажется над рабочим объемом вспомогательного шнека 16, готовая смесь, за счет сил гравитации, поступит через прорезь в емкости 4 в рабочий объем вспомогательного шнека 16. (Фиг.3) Вращение шнеку 16 передается через клиноременную передачу от шкива 11 к шкиву 14. Шнек 16 выполняет функцию автоматической подачи готовой смеси на выгрузку через люк 3 и способствует дополнительному перемешиванию компонентов. Наличие шнека 16 позволяет использовать данный смеситель в непрерывной производственной цепочке, к примеру с подсоединенным к нему гранулятором.
Скорость вращения емкости 4 подбирают согласно требованиям выполняемого технологического процесса, в котором используется смеситель. То есть, чем больше времени необходимо для качественного перемешивания компонентов данной смеси, тем меньше должна быть скорость вращения емкости 4. На выбор скорости вращения емкости 4 влияет также время, затрачиваемое на выгрузку готовой смеси. Необходимое соотношение скоростей вращения вала электродвигателя 9 и емкости 4 достигается путем использования шкивов 10 и 13 различного диаметра или дополнительной установки другой передачи.
Применение в емкости 4 трех прорезей А, Б и В (Фиг.4), расположенных под углом 120° относительно друг друга, обеспечивает снижение времени холостого хода смесителя, то есть времени, когда из емкости 4 выгрузится вся готовая смесь, а компоненты новой смеси еще не начнут поступать. С той же целью (снижение холостого хода) следует располагать погрузочный люк 2 смещенным от вертикальной оси корпуса 1 таким образом, чтобы он следовал сразу за прорезью А в тот момент, когда прорезь Б только закончит проходить рабочую область вспомогательного шнека 16. Выполнение этих двух правил позволяет максимально повысить производительность в работе смесителя, так как практически сразу после завершения выгрузки готовой смеси через прорезь, находящуюся над рабочим объемом шнека 16, начинается погрузка новых компонентов через прорезь, находящуюся под погрузочным люком 2.
Применение бипланетарного привода 5 позволяет организовать движение рабочих органов по циклоидальным траекториям (Фиг.5), что дает возможность качественного смешивания компонентов по всему объему смеси.
Технический результат использования изобретения:
- повышение качества перемешивания за счет использования гибкого рабочего органа;
- уменьшение энергозатрат за счет использования одного электродвигателя;
- возможность автоматизации технологического процесса путем исключения периодичности в работе смесителя, достигаемого применением вращающейся емкости с тремя прорезями, расположенными вдоль образующих цилиндрической поверхности емкости под углом в 120° относительно друг друга.
Устройство несложно в изготовлении и может быть выполнено на стандартном оборудовании в условиях производства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат для получения вязких смесей | 1978 |
|
SU778763A1 |
| Смеситель | 1990 |
|
SU1806053A3 |
| СМЕСИТЕЛЬ СТРОИТЕЛЬНЫХ РАСТВОРОВ | 2002 |
|
RU2228841C1 |
| Бипланетарный смеситель | 1978 |
|
SU778765A1 |
| РЫЧАЖНО-ПЛАНЕТАРНЫЙ СМЕСИТЕЛЬ | 2014 |
|
RU2558593C1 |
| Аппарат для получения смеси сыпучих и жидких материалов | 1977 |
|
SU631187A1 |
| СМЕСИТЕЛЬ ВЫСОКОВЯЗКИХ МАТЕРИАЛОВ | 2014 |
|
RU2553702C1 |
| Устройство для смешивания древесных частиц | 1986 |
|
SU1465327A1 |
| Бипланетарный смеситель | 1987 |
|
SU1533862A1 |
| СМЕСИТЕЛЬ | 2011 |
|
RU2471540C1 |
Изобретение относится к технике для приготовления смесей из сыпучих, вязких, пастообразных компонентов и может применяться в химической и пищевой промышленности, производстве строительных материалов. Смеситель содержит неподвижный корпус, люки для погрузки и выгрузки, бипланетарный привод, электродвигатель, вращающуюся емкость с тремя прорезями, расположенными вдоль образующих цилиндрической поверхности емкости под углом в 120° относительно друг друга. В емкости установлены гибкий рабочий орган, соединенный одним концом с осью сателлита бипланетарного привода, а другим через шарнир с корпусом, два жестких рабочих органа и вспомогательный шнек. Размеры сателлитов в бипланетарном приводе подобраны таким образом, чтобы обеспечить зазор между жесткими рабочими органами и гибким рабочим органом. Изобретение обеспечивает повышение качества процесса перемешивания, уменьшение энергозатрат и возможность автоматизации производственного процесса. 5 ил.
Смеситель, содержащий неподвижный корпус, люки для погрузки и выгрузки, бипланетарный привод, жесткий рабочий орган, электродвигатель, отличающийся тем, что дополнительно содержит в неподвижном корпусе вращающуюся емкость с тремя прорезями, расположенными вдоль образующих цилиндрической поверхности емкости под углом в 120° относительно друг друга, гибкий рабочий орган, соединенный одним концом с осью сателлита бипланетарного привода, а другим - через шарнир с корпусом, два жестких рабочих органа, вспомогательный шнек, причем размеры сателлитов в бипланетарном приводе подобраны таким образом, чтобы обеспечить зазор между жесткими рабочими органами и гибким рабочим элементом.
| Установка для забора воды | 1983 |
|
SU1164378A1 |
| УСТРОЙСТВО ДЛЯ СМЕШЕНИЯ СЫПУЧИХ МАТЕРИАЛОВ И ВЯЗКИХ ЖИДКОСТЕЙ | 2003 |
|
RU2254909C2 |
| Смеситель непрерывного действия | 1988 |
|
SU1562020A1 |
| Смеситель | 1983 |
|
SU1117326A1 |
| Устройство для классификации,преимущественно окомкованных шихтовых материалов | 1981 |
|
SU994042A2 |
| БАРАБАННЫЙ ОКОМКОВАТЕЛЬ | 0 |
|
SU348604A1 |
| JP 2005273926 A, 06.10.2005. | |||

