Изобретение относится к приводам, где требуется преобразовать возвратно-поступательное движение во вращательное движение в одном направлении, например, привод арматуры трубопроводов.
Известны приводы арматуры трубопроводов с двигателем, обеспечивающим возвратно-поступательное движение (например, пневматический, гидравлический, пневмогидравлический, электрогидравлический), силовым механизмом, который преобразует возвратно-поступательное движение в возвратно-поворотное движение выходного звена и с системой управления. В качестве силового механизма часто используется кулисный механизм (Каталоги и Технические проспекты фирм Ledeen (Bulletin №91-001, №95-001, №97-001, Voghera (Pavia) Italy, www.Dresser.com, http://flowcontrol.dresser.com); Grove (Voghera (Pavia) Italy, www.grove.it)).
Сущность изобретения рассматривается по отношению к приводам шаровых кранов магистральных трубопроводов, как технически наиболее сложным и требующим соблюдения ряда установленных параметров. Возвратно-поворотное движение затвора шарового крана приводит к воздействию транспортируемой среды (газа или жидкости) на одни и те же участки поверхности уплотнительных элементов затвора. Такое однообразное воздействие среды, особенно газа, приводит к эрозионному износу обтекаемых участков, в то время как остальные участки уплотнительных элементов остаются практически без изменений. Уплотнения газовых кранов работают в тяжелых условиях, так как скорость потока газа в районе уплотнительных элементов может кратковременно достигать 400 м/с, а при длительной работе 100 м/с.
Эрозионный износ уплотнительных элементов затвора необходимо снизить для повышения надежности и долговечности. Решать эту задачу можно по-разному. Например, применив периодический поворот уплотнительного элемента (описание продукции фирмы Самараволгомаш, www.samaravolgomash.rn) или применив вращательное движение затвора в одну сторону (Я.М.Кутынский. Запорная арматура: состояние, проблемы, пути совершенствования // Газовая промышленность, 1998, №10, с.33-35). Это позволит рассредоточить воздействие транспортируемой среды по поверхностям уплотнительных элементов.
В известных устройствах приводов трубопроводной арматуры затвор осуществляет возвратно-поворотное движение на 90°, получаемое от силового механизма в виде кулисного механизма. Во всех случаях кулисный механизм создает переменный вращающий момент в функции времени при постоянной действующей на него силе и неуравновешенную радиальную силу, действующую на выходное звено. Эта особенность присуща кулисным механизмам.
Задачей настоящего изобретения является создание такого поворотного привода с любым двигателем, преобразующего возвратно-поступательное движение входного звена во вращательное движение выходного звена в одном направлении, который будет создавать вращающий момент без одностороннего воздействия на выходное звено, будет иметь небольшую массу и габариты, а также, в случае необходимости, сможет фиксировать выходное звено в нужном положении для исключения его поворота от воздействия внешних силовых факторов.
Поставленная задача решается тем, что:
1) в поворотном приводе, содержащем не менее чем один двигатель, силовой механизм, систему управления, согласно изобретению в качестве силового механизма содержится цилиндрический свернутый вокруг оси поворота выходного звена клиновой механизм с выполненной по требуемому закону на хотя бы одном из звеньев не менее чем одной винтовой рабочей поверхностью с углом подъема значительно больше угла трения, по которой это звено контактирует с другим звеном непосредственно или через тела качения, или скольжения, причем входное звено связано с подвижным элементом двигателя или само им является и может совершать многократные ходы по необходимому закону движения по не менее чем одному направляющему элементу, являющемуся телом скольжения или качения, имеющему возможность передавать реактивный момент неподвижному звену механизма при рабочем ходе подвижного элемента двигателя, во время которого имеют возможность замыкаться два звена механизма - входное и выходное, или неподвижное и входное, или входное и промежуточное, или промежуточное и выходное, между которыми установлен не менее чем один механизм одностороннего действия, а между выходным и неподвижным звеном установлен не менее чем один нормально-замкнутый управляемый тормоз, размыкающийся только на время поворота выходного звена;
2) в поворотном приводе, содержащем не менее чем один двигатель, силовой механизм, систему управления, согласно изобретению в качестве силового механизма содержится цилиндрический свернутый вокруг оси поворота выходного звена клиновой механизм с выполненной по требуемому закону на хотя бы одном из звеньев не менее чем одной винтовой рабочей поверхностью с углом подъема значительно больше угла трения, по которой это звено контактирует с другим звеном непосредственно или через тела качения, или скольжения, причем входное звено связано с подвижным элементом двигателя или само им является и может совершать многократные ходы по необходимому закону движения по не менее чем одному направляющему элементу, являющемуся телом скольжения или качения, имеющему возможность передавать реактивный момент неподвижному звену механизма при рабочем ходе подвижного элемента двигателя, во время которого имеют возможность замыкаться два звена механизма - входное и выходное, или неподвижное и входное, или входное и промежуточное, или промежуточное и выходное, между которыми установлен не менее чем один механизм одностороннего действия;
3) в поворотном приводе, содержащем не менее чем один двигатель, силовой механизм, систему управления, согласно изобретению в качестве силового механизма содержится цилиндрический свернутый вокруг оси поворота выходного звена клиновой механизм с выполненной по требуемому закону на хотя бы одном из звеньев не менее чем одной условно замкнутой бесконечной винтовой рабочей поверхностью правой и левой направленности с углом подъема значительно больше угла трения, по которой это звено контактирует с другим звеном непосредственно или через тела качения, или скольжения, причем входное звено связано с подвижным элементом двигателя или само им является и может совершать многократные ходы по необходимому закону движения по не менее чем одному направляющему элементу, являющемуся телом скольжения или качения, имеющему возможность передавать реактивный момент неподвижному звену механизма при обоих направлениях хода подвижного элемента двигателя, а между выходным и неподвижным звеном установлен не менее чем один нормально-замкнутый управляемый тормоз, размыкающийся только на время поворота выходного звена;
4) в поворотном приводе, содержащем не менее чем один двигатель, силовой механизм, систему управления, согласно изобретению в качестве силового механизма содержится цилиндрический свернутый вокруг оси поворота выходного звена клиновой механизм с выполненной по требуемому закону на хотя бы одном из звеньев не менее чем одной условно замкнутой бесконечной винтовой рабочей поверхностью правой и левой направленности с углом подъема значительно больше угла трения, по которой это звено контактирует с другим звеном непосредственно или через тела качения, или скольжения, причем входное звено связано с подвижным элементом двигателя или само им является и может совершать многократные ходы по необходимому закону движения по не менее чем одному направляющему элементу, являющемуся телом скольжения или качения, имеющему возможность передавать реактивный момент неподвижному звену механизма при обоих направлениях хода подвижного элемента двигателя;
5) в поворотном приводе, содержащем не менее чем один двигатель, силовой механизм, систему управления, согласно изобретению в качестве силового механизма содержится несколько цилиндрических свернутых вокруг оси поворота выходного звена клиновых механизмов с общим выходным звеном, чередующих в зависимости от направления хода подвижного элемента двигателя, возможность передавать вращающий момент выходному звену, у каждого из которых есть выполненная по требуемому закону на хотя бы одном из звеньев не менее чем одна винтовая рабочая поверхность с углом подъема значительно больше угла трения, по которой это звено контактирует с другим звеном непосредственно или через тела качения, или скольжения, причем у каждого клинового механизма входное звено связано с подвижным элементом двигателя или само им является и может совершать многократные ходы по необходимому закону движения по не менее чем одному направляющему элементу, являющемуся телом скольжения или качения, имеющему возможность передавать реактивный момент неподвижному звену механизма при том ходе подвижного элемента двигателя, когда у одних клиновых механизмов имеют возможность замыкаться два звена - входное и выходное, или неподвижное и входное, или входное и промежуточное, или промежуточное и выходное, между которыми установлен не менее чем один механизм одностороннего действия, а у других клиновых механизмов имеют возможность размыкаться два звена - входное и выходное, или неподвижное и входное, или входное и промежуточное, или промежуточное и выходное, между которыми установлен не менее чем один механизм одностороннего действия, причем между выходным и неподвижным звеном установлен не менее чем один нормально-замкнутый управляемый тормоз, размыкающийся только на время поворота выходного звена;
6) в поворотном приводе, содержащем не менее чем один двигатель, силовой механизм, систему управления, согласно изобретению в качестве силового механизма содержится несколько цилиндрических свернутых вокруг оси поворота выходного звена клиновых механизмов с общим выходным звеном, чередующих в зависимости от направления хода подвижного элемента двигателя возможность передавать вращающий момент выходному звену, у каждого из которых есть выполненная по требуемому закону на хотя бы одном из звеньев не менее чем одна винтовая рабочая поверхность с углом подъема значительно больше угла трения, по которой это звено контактирует с другим звеном непосредственно или через тела качения, или скольжения, причем у каждого клинового механизма входное звено связано с подвижным элементом двигателя или само им является и может совершать многократные ходы по необходимому закону движения по не менее чем одному направляющему элементу, являющемуся телом скольжения или качения, имеющему возможность передавать реактивный момент неподвижному звену механизма при том ходе подвижного элемента двигателя, когда у одних клиновых механизмов имеют возможность замыкаться два звена - входное и выходное, или неподвижное и входное, или входное и промежуточное, или промежуточное и выходное, между которыми установлен не менее чем один механизм одностороннего действия, а у других клиновых механизмов имеют возможность размыкаться два звена - входное и выходное, или неподвижное и входное, или входное и промежуточное, или промежуточное и выходное, между которыми установлен не менее чем один механизм одностороннего действия.
Сущность изобретения поясняется чертежами вариантов выполнения привода:
фиг.1 - общий вид привода по п.1 формулы;
фиг.2 - общий вид привода по п.1 формулы;
фиг.3 - общий вид привода по п.1 формулы;
фиг.4 - общий вид привода по п.2 формулы;
фиг.5 - общий вид привода по п.2 формулы;
фиг.6 - общий вид привода по п.2 формулы;
фиг.7 - общий вид привода по п.2 формулы;
фиг.8 - общий вид привода по п.2 формулы;
фиг.9 - общий вид привода по п.3 формулы;
фиг.10 - общий вид привода по п.4 формулы;
фиг.11 - общий вид привода по п.4 формулы;
фиг.12 - общий вид привода по п.5 формулы;
фиг.13 - общий вид привода по п.6 формулы;
фиг.14 - общий вид привода по п.5 формулы;
фиг.15 - общий вид привода по п.6 формулы.
Далее приведены расчетные графики параметров привода и сравнение габаритов привода по фиг.1 изобретения с приводом модели MT255-2/200-S-GH фирмы Ledeen:
фиг.16 - графики изменения диаметра Dп подвижного элемента привода с конструктивными ограничениями от диаметра Dpw окружности расположения тел качения;
фиг.17 - графики изменения условной высоты h привода без тормоза от диаметра Dpw окружности расположения тел качения;
фиг.18 - графики изменения условного объема V привода с конструктивными ограничениями от диаметра Dpw окружности расположения тел качения;
фиг.19 - графики изменения хода s подвижного элемента привода от диаметра Dpw окружности расположения тел качения;
фиг.20 - графики изменения требуемого осевого усилия FaΣ в приводе от диаметра Dpw окружности расположения тел качения;
фиг.21 - графики изменения условной высоты hm привода без тормоза от числа двойных ходов mx подвижного элемента;
фиг.22 - сравнение габаритов привода модели MT255-2/200-S-GH фирмы Ledeen с приводом по фиг.1 изобретения, имеющим тормоз, для вращающего момента 142300 Нм.
Поворотный привод на фиг.1 содержит неподвижное звено 1 клинового механизма, одновременно являющееся корпусом двигателя (например, корпусом гидроцилиндра), жестко связанное со вторым неподвижным звеном 9 клинового механизма по функциональным и конструктивным соображениям, подвижный элемент 2 двигателя, входное звено 3, промежуточное звено 7, механизм одностороннего действия 14, нормально-замкнутый управляемый тормоз 17 и выходное звено 11. Система управления на фиг.1 не показана для большей ясности предмета изобретения и она может быть любого типа.
Внутри неподвижного звена 1 может перемещаться подвижный элемент 2 двигателя - поршень. По функциональным и конструктивным соображениям подвижный элемент 2 жестко связан с входным звеном 3 клинового механизма, имеющим несколько винтовых канавок 6. Промежуточное звено 7 имеет ответные винтовые канавки 8. Винтовые рабочие поверхности канавок 6 и 8 выполнены по требуемому закону, имеют угол подъема значительно больше угла трения и имеют в сечении нужную форму. Для снижения потерь при работе, звенья 3 и 7 могут быть разделены телами качения 29, расположенными в винтовых канавках 6 и 8. Подвижный элемент 2 имеет дополнительные винтовые пазы 4 - направляющие пазы, задающие закон его движения, и движения жестко связанного с ним входного звена 3 клинового механизма. Поверхности этих направляющих пазов 4 могут скользить по нескольким направляющим элементам 5, закрепленным в неподвижном звене 1 клинового механизма. Так как угол подъема винтовых канавок 6 и 8 значительный, то изменение положения подвижного элемента 2 с входным звеном 3 дает возможность получить поворотное движение промежуточного звена 7 клинового механизма в соответствии с законом, заданным винтовыми канавками 6 и 8, а также законом, заданным дополнительными винтовыми пазами 4. Звенья 3 и 7 с винтовыми рабочими поверхностями, контактирующие между собой через тела качения 29, являются основными элементами цилиндрического свернутого вокруг оси поворота выходного звена 11 клинового механизма. Он и выступает в качестве силового механизма в приводе по фиг.1. Клиновой механизм такого исполнения внешне похож на передачу винт-гайка качения с очень большим углом подъема винтовых канавок. На торцевых поверхностях звеньев 3 и 7 закреплены ограничительные шайбы 30 и 31 для предотвращения выхода тел качения 29 за пределы области совместного их контакта с винтовыми канавками 6 и 8. Возможно применение сепаратора для тел качения или применение обводного канала для замыкания цепи тел качения. Промежуточное звено 7 опирается на кольцевой ряд тел качения 10, установленных между промежуточным звеном 7 и неподвижным звеном 9 клинового механизма.
Между промежуточным звеном 7 и выходным звеном 11 клинового механизма с помощью неподвижных соединений 12 и 13 установлен механизм одностороннего действия 14, предназначенный для передачи вращающего момента от промежуточного звена 7 выходному звену 11 только в одном направлении. Таким механизмом может служить, например, односторонняя муфта свободного хода или храповой механизм.
Между выходным звеном 11 и неподвижным звеном 9 клинового механизма установлен нормально-замкнутый управляемый тормоз 17 с помощью неподвижных соединений 18 и 19, для того чтобы гарантировать неподвижность выходного звена 11 при воздействии внешних силовых факторов в моменты переключения направления движения подвижного элемента 2 и при холостом ходе. Этот тормоз состоит из наружного кольца 20 с клиновыми пазами 25, связанного неподвижным соединением 18 с неподвижным звеном 9 клинового механизма; из внутреннего кольца 21, связанного неподвижным соединением 19 с выходным звеном 11, ряда роликов 22 и вкладышей 23, расположенных между кольцами 20 и 21, пружин 24, которые могут поджимать ролики 22 и вкладыши 23 в узкую часть клиновых пазов 25 наружного кольца 20. Наружное кольцо 20 имеет отверстия 26, через которые может подаваться под давлением рабочая среда в полости 27 для сжатия пружин 24, и отверстия 28, служащие для отвода рабочей среды из полости расположения пружин 24.
Работает привод по фиг.1 следующим образом.
В верхнюю полость 15 двигателя и через отверстия 26 в полости 27 управляемого тормоза 17 подается под давлением рабочая среда, поэтому вкладыши 23, воздействуя через ролики 22 на пружины 24, сжимают их. В результате этого ролики 22 входят в широкую часть клиновых пазов 25, внутреннее кольцо 21 освобождается и первоначально замкнутый управляемый тормоз 17 размыкается. Рабочая среда из полостей расположения пружин 24 отводится через отверстия 28. В это же время подвижный элемент 2, жестко связанный с входным звеном 3 клинового механизма, начинает двигаться вниз, скользя по направляющим элементам 5, передающим возникающий реактивный момент неподвижному звену 1 механизма. Осевая сила, развиваемая подвижным элементом 2 и передаваемая входному звену 3 клинового механизма, и далее через контактные поверхности винтовых канавок 6 и 8 с телами качения 29 промежуточному звену 7, воспринимается кольцевым рядом тел качения 10. Таким образом, входное звено 3 клинового механизма при своем движении вниз поворачивает промежуточное звено 7, которое передает вращающий момент через неподвижное соединение 12 механизму одностороннего действия 14. Этот механизм через неподвижное соединение 13 передает вращение незаторможенному выходному звену 11 и связанному с ним затвору арматуры, который поворачивается на определенный угол в зависимости от принятых конструктивных параметров привода.
В нижнем положении подвижного элемента 2 датчик двойного хода, установленный в системе управления (на фиг.1 система управления не показана), подает сигнал на реверсирование движения подвижного элемента 2. Во время переключения направления движения подвижного элемента 2 выходное звено 11 неподвижно, так как управляемый тормоз 17 будет замкнут.Теперь рабочая среда под давлением подается в нижнюю полость 16 двигателя и не подается в отверстия 26 управляемого тормоза 17. Ролики 22 под воздействием пружин 24 входят в узкую часть клиновых пазов 25 и тормозят выходное звено 11 от вращения в двух направлениях. Подвижный элемент 2, жестко связанный с входным звеном 3 клинового механизма, начинает двигаться вверх, при этом промежуточное звено 7 поворачивается в обратную сторону, так как изменились направления осевой и окружной сил, и поверхности контакта винтовых канавок 6 и 8 звеньев 3 и 7 с телами качения 29. Но теперь промежуточное звено 7 не может повернуть выходное звено 11, так как механизм одностороннего действия 14 в этом направлении не передает вращающий момент, а выходное звено 11 заторможено. При достижении подвижным элементом 2 верхнего положения завершается один двойной ход и промежуточное звено 7 поворачивается на тот же угол, что и при движении вниз.
Если необходимое угловое положение затвора трубопроводной арматуры достигнуто за один двойной ход, то датчик углового положения затвора или положения выходного звена 11, установленный в системе управления (на фиг.1 система управления и затвор не показаны), подает сигнал на завершение работы привода, причем управляемый тормоз 17 будет замкнут.В противном случае выполняется следующий двойной ход подвижного элемента 2. Ввиду возможных отклонений размеров деталей привода при изготовлении, погрешностей привода при монтаже и возникновении люфтов при эксплуатации последний двойной ход подвижного элемента 2 с входным звеном 3 клинового механизма для достижения поворота затвора арматуры на необходимый угол может быть выполнен не на полную длину, но завершение работы привода происходит только в исходном положении. Таким образом, поворот затвора арматуры можно осуществить на любой необходимый угол.
Количество двойных ходов больше одного, с одной стороны, приводит к уменьшению высоты привода, с другой стороны, к увеличению времени поворота на необходимый угол. Второй фактор важен для привода, как скоростной параметр. Его можно выдержать в необходимых пределах за счет увеличения скорости движения подвижного элемента 2 вверх.
Управляемый тормоз 17 выполняет важную функцию - он может размыкаться только на время рабочего хода, а в остальное время не дает возможности передавать вращающий момент ни от клинового механизма, ни от внешнего воздействия на выходное звено. Тормоз обеспечивает неподвижность затвора шарового крана в любом положении при воздействии на него потока транспортируемой среды и исключает его неконтролируемый поворот, так как в этом случае вращающий момент от затвора через выходное звено 11 привода и управляемый тормоз 17 замыкается на неподвижном звене 9 клинового механизма, которое, в свою очередь, связано с неподвижным корпусом крана.
Конструктивно тормоз может не входить в состав поворотного привода. Он может быть установлен непосредственно на шпинделе затвора в составе самого шарового крана. Если же существенного воздействия внешних силовых факторов на выходное звено 11 нет, влияние потока транспортируемой среды незначительно и оно гасится за счет поджатия уплотнений к затвору шарового крана, то тормоз вообще не нужен.
Поворотный привод на фиг.2 содержит неподвижное звено 1 клинового механизма, одновременно являющееся корпусом двигателя (например, корпусом пневмоцилиндра), жестко связанное со вторым неподвижным звеном 9 клинового механизма по функциональным и конструктивным соображениям, подвижный элемент 2 двигателя, промежуточное звено 7, механизмы одностороннего действия 14, нормально-замкнутый управляемый тормоз 17 и выходное звено 11. Система управления на фиг.2 не показана для большей ясности предмета изобретения и она может быть любого типа.
Внутри неподвижного звена 1 может перемещаться подвижный элемент 2 двигателя - поршень. По функциональным и конструктивным соображениям подвижный элемент 2 в данном случае представляет собой входное звено клинового механизма. В подвижном элементе 2 выполнено несколько вертикальных пазов 6. Эти пазы 6 могут быть и винтовыми, выполненными по требуемому закону. Подвижный элемент 2 имеет также дополнительные винтовые пазы 4 - направляющие пазы, задающие закон его движения. Винтовые рабочие поверхности пазов 4 могут скользить по нескольким направляющим элементам 5, шарнирно закрепленным в неподвижном звене 1 клинового механизма. Звено 2 с винтовой рабочей поверхностью пазов 4 и неподвижное звено 1, контактирующие между собой через тела скольжения 5, являются основными элементами цилиндрического свернутого вокруг оси поворота выходного звена 11 клинового механизма. Он и выступает в качестве силового механизма в приводе по фиг.2. Вертикальные пазы 6 сопряжены с промежуточным звеном 7 посредством ползунов 29, шарнирно связанных с промежуточным звеном 7. Между промежуточным звеном 7 и выходным звеном 11 с помощью неподвижных соединений 12 и 13 установлены три механизма одностороннего действия 14, предназначенные для передачи вращающего момента от звена 7 выходному звену 11 только в одном направлении. Такими механизмами могут служить, например, односторонние муфты свободного хода или храповые механизмы. Их количество обусловлено величиной передаваемого вращающего момента. Промежуточное звено 7 опирается на сегменты 10, установленные в неподвижном звене 9 клинового механизма.
Между выходным звеном 11 и неподвижным звеном 9 клинового механизма установлен нормально-замкнутый управляемый тормоз 17 с помощью неподвижных соединений 18 и 19, для того чтобы гарантировать неподвижность выходного звена 11 при воздействии внешних силовых факторов в моменты переключения направления движения подвижного элемента 2 и при холостом ходе. Устройство тормоза аналогично рассмотренному устройству в конструкции привода по фиг.1.
Работает привод по фиг.2 следующим образом.
В верхнюю полость 15 двигателя и через отверстия 26 в полости 27 управляемого тормоза 17 подается под давлением рабочая среда. Управляемый тормоз 17 размыкается (аналогично работе тормоза по фиг.1). Подвижный элемент 2 начинает двигаться вниз и одновременно поворачиваться, скользя по направляющим элементам 5. Вращающий момент, развиваемый подвижным элементом 2, передается промежуточному звену 7 посредством ползунов 29. Далее вращающий момент передается через неподвижное соединение 12 трем механизмам одностороннего действия 14. Эти механизмы через неподвижное соединение 13 передают вращение незаторможенному выходному звену 11 и связанному с ним затвору арматуры, который поворачивается на определенный угол в зависимости от принятых конструктивных параметров привода.
В нижнем положении подвижного элемента 2 датчик двойного хода, установленный в системе управления (на фиг.2 система управления не показана), подает сигнал на реверсирование движения подвижного элемента 2. Во время переключения направления движения подвижного элемента 2 выходное звено 11 неподвижно, так как управляемый тормоз 17 будет замкнут.Теперь рабочая среда под давлением подается в нижнюю полость 16 двигателя и не подается в отверстия 26 управляемого тормоза 17. Ролики 22 под воздействием пружин 24 входят в узкую часть клиновых пазов 25 и тормозят выходное звено 11 от вращения в двух направлениях. В это время подвижный элемент 2 начинает двигаться вверх и одновременно поворачиваться в обратную сторону. Но теперь промежуточное звено 7 не может повернуть выходное звено 11, так как механизмы одностороннего действия 14 в этом направлении не передают вращающий момент, а выходное звено 11 заторможено. При достижении подвижным элементом 2 верхнего положения завершается один двойной ход и промежуточное звено 7 поворачивается на тот же угол, что и при движении вниз.
Вариант привода на фиг.3 отличается от представленного на фиг.1 тем, что содержит управляемые стопорные устройства 32, выполняющие функцию механизма одностороннего действия, закрепленные на неподвижном звене 1 клинового механизма. Направляющие элементы 5 жестко закреплены на штоках 35 управляемых стопорных устройств 32. В подвижном элементе 2 выполнены дополнительные винтовые пазы 4 - направляющие пазы, число которых пропорционально углу поворота выходного звена 11. Эти направляющие пазы 4 могут быть вертикальными. Количество нормально-замкнутых управляемых тормозов 17 обусловлено величиной необходимого тормозного момента. На фиг.3 показаны три управляемых тормоза 17. Устройство каждого управляемого тормоза аналогично рассмотренному устройству в конструкции привода по фиг.1.
Работает привод по фиг.3 следующим образом.
В верхнюю полость 15 двигателя и через отверстия 26 в полости 27 каждого управляемого тормоза 17 подается под давлением рабочая среда, при этом управляемые тормоза 17 размыкаются (аналогично работе тормоза по фиг.1). Одновременно рабочая среда подается и в полость 33 управляемых стопорных устройств 32. Штоки 35 управляемых стопорных устройств 32 перемещаются, устанавливая направляющие элементы 5 в направляющие пазы 4. Подвижный элемент 2, жестко связанный с входным звеном 3, начинает двигаться вниз, скользя по направляющим элементам 5, передающим возникающий реактивный момент неподвижному звену 1 клинового механизма. Осевая сила, развиваемая подвижным элементом 2 и передаваемая входному звену 3, и далее через контактные поверхности винтовых канавок 6 и 8 с телами качения 29 выходному звену 11, воспринимается кольцевым рядом тел качения 10.
Таким образом, входное звено 3 при своем движении вниз поворачивает выходное звено 11 на определенный угол.
В нижнем положении подвижного элемента 2 датчик двойного хода, установленный в системе управления (на фиг.3 система управления не показана), подает сигнал на реверсирование движения подвижного элемента 2. Во время переключения направления движения подвижного элемента 2 выходное звено 11 неподвижно, так как управляемые тормоза 17 будут замкнуты. Теперь рабочая среда под давлением подается в нижнюю полость 16 двигателя и не подается в отверстия 26 управляемых тормозов 17. Ролики 22 под воздействием пружин 24 входят в узкую часть клиновых пазов 25 и тормозят выходное звено 11 от вращения в двух направлениях. Одновременно рабочая среда подается и в полость 34 управляемых стопорных устройств 32. Штоки 35 управляемых стопорных устройств 32 перемещаются в обратную сторону, извлекая направляющие элементы 5 из направляющих пазов 4. В это время подвижный элемент 2, жестко связанный с входным звеном 3, начинает двигаться вверх и одновременно поворачиваться на тот же угол и в том же направлении, в каком при движении вниз поворачивалось выходное звено 11. При этом само выходное звено 11 остается неподвижным, так как тормоза 17 будут замкнуты. При достижении подвижным элементом 2 верхнего положения завершается один двойной ход, при этом напротив направляющих элементов 5, выдвигающихся из управляемых стопорных устройств 32 при рабочем ходе, располагаются следующие направляющие пазы 4, выполненные в подвижном элементе 2.
Вариант привода на фиг.4 отличается от представленных на фиг.1 и фиг.3 тем, что механизм одностороннего действия 14 установлен между неподвижным звеном 1 клинового механизма и подвижным элементом 2 двигателя. Подвижный элемент 2 жестко связан с входным звеном 3, имеющим винтовые канавки 6. Выходное звено 11 имеет ответные винтовые канавки 8. Звенья 3 и 11 могут быть разделены телами качения 29. Подвижный элемент 2 имеет направляющие пазы 4, которые могут скользить по направляющим элементам 5, закрепленным в механизме одностороннего действия 14.
Отличие в работе привода по фиг.4 состоит в том, что при рабочем ходе подвижного элемента 2 вниз по направляющим элементам 5, возникающий реактивный момент передается через эти направляющие механизму одностороннего действия 14. А он, в свою очередь, через неподвижное соединение 12 передает реактивный момент неподвижному звену 1 клинового механизма. Вращающий момент, получаемый при перемещении подвижного элемента 2 вниз, передается от входного звена 3 через тела качения 29 выходному звену 11. Для данного варианта привода воздействия внешних силовых факторов на выходное звено 11 нет, поэтому нормально-замкнутый управляемый тормоз отсутствует. Во время переключения направления движения подвижного элемента 2 и при его движении вверх выходное звено 11 неподвижно. Получив сигнал на реверсирование движения, подвижный элемент 2 вместе с жестко связанным с ним входным звеном 3 начинает двигаться вверх и одновременно поворачиваться в ту же сторону, куда поворачивалось при рабочем ходе выходное звено 11. Поворот подвижного элемента 2 происходит за счет того, что механизм одностороннего действия 14 не может передавать момент в таком направлении. По достижении подвижным элементом 2 верхнего положения завершается один двойной ход.
Вариант привода на фиг.5 отличается от представленных выше тем, что входное звено 3 связано с подвижным элементом 2 двигателя шарнирно с помощью кольцевого ряда тел качения 39. Механизм одностороннего действия 14 установлен между вспомогательным неподвижным звеном 48 клинового механизма и входным звеном 3. Вспомогательное неподвижное звено 48 жестко связано с неподвижными звеньями 1 и 9 клинового механизма. Входное звено 3 имеет винтовые канавки 6. Выходное звено 11 имеет ответные винтовые канавки 8. Звенья 3 и 11 могут быть разделены телами качения 29. Входное звено 3 имеет направляющие пазы 4, которые могут скользить по направляющим элементам 5, закрепленным в механизме одностороннего действия 14. Подвижный элемент 2 имеет вспомогательные направляющие пазы 84, которые могут скользить по вспомогательным направляющим элементам 85, закрепленным в неподвижном звене 1. Выходное звено 11 опирается на кольцевой ряд тел качения 10, установленных между выходным звеном 11 и неподвижным звеном 9 клинового механизма.
Работает привод по фиг.5 следующим образом.
При рабочем ходе подвижный элемент 2 начинает двигаться вниз по вспомогательным направляющим элементам 85. Осевая сила, развиваемая подвижным элементом 2 и передаваемая через тела качения 39 входному звену 3 клинового механизма, и далее через контактные поверхности винтовых канавок 6 и 8 с телами качения 29 выходному звену 11, воспринимается кольцевым рядом тел качения 10. Вместе с подвижным элементом 2 начинает двигаться вниз и входное звено 3 по направляющим элементам 5. Возникающий реактивный момент передается через эти направляющие 5 механизму одностороннего действия 14. А он, в свою очередь, через неподвижное соединение 12 передает реактивный момент вспомогательному неподвижному звену 48 клинового механизма. Вращающий момент, получаемый от входного звена 3, передается через тела качения 29 выходному звену 11. Для данного варианта привода воздействия внешних силовых факторов на выходное звено 11 нет, поэтому нормально-замкнутый управляемый тормоз отсутствует. Во время переключения направления движения подвижного элемента 2 и при его движении вверх выходное звено 11 неподвижно. Получив сигнал на реверсирование движения, подвижный элемент 2 начинает двигаться вверх по вспомогательным направляющим элементам 85. Вместе с ним начинает двигаться вверх по направляющим элементам 5 входное звено 3 и при этом одновременно поворачиваться в ту же сторону, в какую поворачивалось при рабочем ходе выходное звено 11. Поворот входного звена 3 происходит потому, что механизм одностороннего действия 14 не может передавать момент в таком направлении. По достижении подвижным элементом 2 верхнего положения завершается один двойной ход.
Вариант привода на фиг.6 отличается от представленного на фиг.1 тем, что не содержит промежуточного звена, и винтовые рабочие поверхности канавок 4 и 50 с разделяющими их телами качения 5 расположены не между входным и промежуточным звеном, как ранее, а между входным звеном 3 и неподвижным звеном 9 клинового механизма. Тела качения 5 выполняют функцию направляющих элементов, передающих возникающий реактивный момент неподвижному звену 9 клинового механизма. Привод на фиг.6 содержит неподвижное звено 1 клинового механизма, внутри которого может перемещаться подвижный элемент 2 двигателя. Подвижный элемент 2 жестко связан с входным звеном 3, имеющим винтовые канавки 4 - направляющие канавки. Неподвижное звено 9 клинового механизма имеет ответные винтовые канавки 50. Винтовые рабочие поверхности канавок 4 и 50 выполнены по требуемому закону, имеют угол подъема значительно больше угла трения и имеют в сечении нужную форму. Для предотвращения выхода направляющих элементов 5 за пределы области совместного их контакта с винтовыми канавками 4 и 50 на входном звене 3 установлены ограничительные шайбы 30 и 31. Входное звено 3 имеет еще и вертикальные пазы 6. Поверхности этих пазов могут скользить по направляющим элементам 29, закрепленным в механизме одностороннего действия 14, который с помощью неподвижного соединения 13 связан с выходным звеном 11. Механизм одностороннего действия 14 предназначен для передачи вращающего момента от входного звена 3 выходному звену 11 только в одном направлении. Таким механизмом может служить, например, односторонняя муфта свободного хода или храповой механизм. Наружное кольцо этого механизма опирается на кольцевой ряд тел качения 39, установленных в выходном звене 11, которое в свою очередь опирается на другой кольцевой ряд тел качения 10, установленных между выходным звеном 11 и неподвижным звеном 9 клинового механизма.
Работает привод по фиг.6 следующим образом.
В верхнюю полость 15 двигателя подается под давлением рабочая среда. Входное звено 3, жестко связанное с подвижным элементом 2 двигателя, начинает двигаться вниз и одновременно поворачиваться, обкатываясь по телам качения 5. Развиваемый при этом вращающий момент передается, посредством направляющих элементов 29, механизму одностороннего действия 14. Этот механизм через неподвижное соединение 13 передает вращение выходному звену 11 и связанному с ним затвору арматуры, который поворачивается на определенный угол в зависимости от принятых конструктивных параметров привода. Возникающий при движении подвижного элемента 2, жестко связанного с входным звеном 3, реактивный момент передается через направляющие элементы 5 неподвижному звену 9 клинового механизма. Осевая сила, развиваемая подвижным элементом 2 и передаваемая входному звену 3, и далее через контакт боковых поверхностей вертикальных пазов 6 с направляющими элементами 29 механизму одностороннего действия 14, воспринимается кольцевым рядом тел качения 39 и далее через другой кольцевой ряд тел качения 10 передается неподвижному звену 9 клинового механизма.
В нижнем положении подвижного элемента 2 датчик двойного хода, установленный в системе управления (на фиг.6 система управления не показана), подает сигнал на реверсирование движения подвижного элемента 2. Для данного варианта привода воздействия внешних силовых факторов на выходное звено 11 нет, поэтому нормально-замкнутый управляемый тормоз отсутствует. Во время переключения направления движения подвижного элемента 2 и при его движении вверх выходное звено 11 неподвижно. Теперь рабочая среда под давлением подается в нижнюю полость 16 двигателя. Подвижный элемент 2 начинает двигаться вверх и одновременно поворачиваться в сторону, обратную повороту выходного звена 11 при рабочем ходе. Поворот подвижного элемента 2 происходит в направлении, в котором механизм одностороннего действия 14 не передает вращающий момент. При достижении подвижным элементом 2 верхнего положения завершается один двойной ход и входное звено 3, жестко связанное с подвижным элементом 2 двигателя, поворачивается на тот же угол, что и при движении вниз.
Вариант привода на фиг.7 отличается от вышеописанных вариантов тем, что содержит несколько механизмов одностороннего действия 14, 76 и 81, установленных между входным звеном 3 и промежуточным звеном 7, между промежуточным звеном 7 и промежуточным звеном 78, и между промежуточным звеном 78 и выходным звеном 11 соответственно. Таким механизмом может служить, например, односторонняя муфта свободного хода, с телами качения, которая может кроме передачи вращающего момента еще и воспринимать осевую нагрузку. Подвижный элемент 2 двигателя жестко связан с входным звеном 3, имеющим винтовые канавки 6. Рабочие поверхности канавок 6 контактируют с телами скольжения 29, установленными на наружном кольце механизма одностороннего действия 14, который связан с промежуточным звеном 7 неподвижным соединением 13. Промежуточное звено 7 имеет винтовые канавки 74 с меньшим, чем у канавок 6 углом подъема. Рабочие поверхности канавок 74 контактируют с телами скольжения 75, установленными на наружном кольце механизма одностороннего действия 76, который связан со вторым промежуточным звеном 78 неподвижным соединением 77. Промежуточное звено 78 имеет винтовые канавки 79 с меньшим, чем у канавок 74 углом подъема. Рабочие поверхности канавок 79 контактируют с телами скольжения 80, установленными на наружном кольце механизма одностороннего действия 81, который связан с выходным звеном 11 неподвижным соединением 82. Входное звено 3 имеет направляющие пазы 4, которые могут скользить по направляющим элементам 5, закрепленным в неподвижном звене 9 клинового механизма. Выходное звено 11 опирается на кольцевой ряд тел качения 10, установленных между ним и неподвижным звеном 9 клинового механизма.
Работает привод по фиг.7 следующим образом.
В верхнюю полость 15 двигателя подается под давлением рабочая среда. Подвижный элемент 2 начинает двигаться вниз. Вместе с ним движется вниз входное звено 3 клинового механизма, скользя по направляющим элементам 5, передающим возникающий реактивный момент неподвижному звену 9 механизма. Осевая сила, развиваемая подвижным элементом 2 и передаваемая входному звену 3, далее через контактные поверхности винтовых канавок 6, 74 и 79 с телами скольжения 29, 75 и 80, через механизмы одностороннего действия 14, 76 и 81, установленные на промежуточных звеньях 7, 78 и на выходном звене 11, передается выходному звену 11 и воспринимается кольцевым рядом тел качения 10. Механизмы одностороннего действия 14 и 76 перемещаются вниз вместе с промежуточными звеньями 7 и 78. Входное звено 3 клинового механизма при своем движении вниз поворачивает промежуточное звено 7 вместе с установленным на нем механизмом одностороннего действия 14 на небольшой угол. Далее вращающий момент передается промежуточному звену 78 с установленным на нем механизмом одностороннего действия 76. Промежуточное звено 78, за счет меньшего угла подъема канавок 74, поворачивается уже на больший угол, чем промежуточное звено 7. Далее вращающий момент передается выходному звену 11 с установленным на нем механизмом одностороннего действия 81. Выходное звено 11, за счет меньшего угла подъема канавок 79, поворачивается еще на больший угол, чем промежуточные звенья 78 и 7.
Получив сигнал на реверсирование движения, подвижный элемент 2 вместе с жестко связанным с ним входным звеном 3 начинает двигаться вверх. Для данного варианта привода воздействия внешних силовых факторов на выходное звено 11 нет, поэтому нормально-замкнутый управляемый тормоз отсутствует. Во время переключения направления движения подвижного элемента 2 и при его движении вверх выходное звено 11 неподвижно. Промежуточные звенья 7 и 78 вместе с установленными на них механизмами одностороннего действия 14 и 76 телескопически начинают перемещаться вверх. При этом промежуточные звенья 7 и 78 начинают вращаться в обратном направлении, чем при движении вниз, за счет того, что механизмы одностороннего действия 14, 76 и 81 не могут передавать момент в таком направлении. По достижении подвижным элементом 2 верхнего положения завершается один двойной ход.
Вариант привода на фиг.8 отличается тем, что механизм одностороннего действия 14 установлен между входным звеном 3 и промежуточным звеном 7. Таким механизмом может служить, например, односторонняя муфта свободного хода с телами качения, которая может кроме передачи вращающего момента еще воспринимать осевую нагрузку. Подвижный элемент 2 двигателя жестко связан с входным звеном 3, имеющим винтовые канавки 6. Рабочие поверхности канавок 6 контактируют с телами скольжения 29, установленными на наружном кольце механизма одностороннего действия 14, который связан с промежуточным звеном 7 неподвижным соединением 13. Промежуточное звено 7, в свою очередь, связано с выходным звеном 11 с помощью подвижного соединения 83, в конкретном случае, шлицевого. Входное звено 3 имеет направляющие пазы 4, которые могут скользить по направляющим элементам 5, закрепленным в неподвижном звене 9 клинового механизма. Выходное звено 11 опирается на кольцевой ряд тел качения 10, установленных между ним и неподвижным звеном 9 клинового механизма.
Работает привод по фиг.8 следующим образом.
В верхнюю полость 15 двигателя подается под давлением рабочая среда. Подвижный элемент 2 начинает двигаться вниз. Вместе с ним движется вниз входное звено 3 клинового механизма, скользя по направляющим элементам 5, передающим возникающий реактивный момент неподвижному звену 9 механизма. Механизм одностороннего действия 14 перемещается вниз вместе с промежуточным звеном 7. Осевая сила, развиваемая подвижным элементом 2 и передаваемая входному звену 3, воспринимается механизмом одностороннего действия 14 и кольцевым рядом тел качения 10. Входное звено 3 клинового механизма при своем движении вниз, через тела скольжения 29, механизм одностороннего действия 14, неподвижное соединение 13 поворачивает промежуточное звено 7. Через подвижное соединение 83 вращающий момент от промежуточного звена 7 передается выходному звену 11.
Получив сигнал на реверсирование движения, подвижный элемент 2 вместе с жестко связанным с ним входным звеном 3 начинает двигаться вверх. Для данного варианта привода воздействия внешних силовых факторов на выходное звено 11 нет, поэтому нормально-замкнутый управляемый тормоз отсутствует. Во время переключения направления движения подвижного элемента 2 и при его движении вверх выходное звено 11 неподвижно. Промежуточное звено 7 вместе с установленным на нем механизмом одностороннего действия 14 начинает перемещаться вверх, но не поворачиваться. Поворачиваться в обратную сторону начинает наружное кольцо механизма одностороннего действия 14 вместе с телами скольжения 29, которые контактируют с рабочими поверхностями винтовых канавок 6. По достижении подвижным элементом 2 верхнего положения завершается один двойной ход.
Вариант привода на фиг.9 отличается от вышеописанных вариантов тем, что не совершается холостой ход - оба движения подвижного элемента 2 двигателя являются рабочими. На поверхности выходного звена 11 выполнена условно замкнутая бесконечная винтовая канавка 8 с рабочими поверхностями правой и левой направленности. Между поверхностями разной направленности в явном виде выполнены переходные участки для исключения заедания механизма и переключения работы этих поверхностей. Подвижный элемент 2 имеет дополнительные вертикальные пазы 4 - направляющие пазы. Поверхности этих направляющих пазов 4 могут скользить по нескольким направляющим элементам 5, закрепленным в неподвижном звене 1 клинового механизма. Во входном звене 3, жестко связанном с подвижным элементом 2, закреплены направляющие пальцы 29. Рабочие поверхности бесконечной винтовой канавки 8 и поверхности направляющих пальцев 29 представляют собой рабочие поверхности свернутого клинового механизма, совмещающего в себе, за счет выполнения винтовых поверхностей правой и левой направленности на поверхности одной и той же детали, выходного звена 11, функции двух клиновых механизмов. Выходное звено 11 с винтовыми рабочими поверхностями канавки 8 и входное звено 3, контактирующие между собой через тела скольжения 29, являются основными элементами клинового механизма, выступающего в качестве силового механизма в приводе по фиг.9. Между выходным звеном 11 и вторым неподвижным звеном 9 клинового механизма, жестко связанным со звеном 1, установлен нормально-замкнутый управляемый тормоз 17. Устройство тормоза аналогично рассмотренному устройству в конструкции привода по фиг.1.
Работает привод по фиг.9 следующим образом.
После вертикального перемещения вниз подвижного элемента 2 на величину Δh переходного участка направляющие пальцы 29 входят в контакт с рабочими боковыми поверхностями винтовой канавки 8, которые имеют левую направленность, в результате чего выходное звено 11 начинает поворачиваться по часовой стрелке (здесь и далее при виде сверху). При достижении подвижным элементом 2 нижнего положения, направляющие пальцы 29 оказываются в конце переходных участков. После вертикального перемещения по переходным участкам вверх на величину Δh направляющие пальцы 29 входят в контакт с рабочими боковыми поверхностями винтовой канавки 8, которые имеют правую направленность, в результате чего выходное звено 11 продолжает поворачиваться по часовой стрелке. Достигнув верхнего положения, направляющие пальцы 29 оказываются в конце переходных участков и при очередном движении вниз они снова попадают на рабочие боковые поверхности винтовой канавки 8, которые имеют левую направленность. При движении направляющих пальцев 29 по переходным участкам на величину Δh выходное звено 11 не поворачивается. Из-за этого непрерывное поворотное движение выходного звена имеет условный характер. В это переходное время выходное звено 11 фиксируется тормозом 17, но из-за незначительного времени, затрачиваемого на прохождение переходного участка, можно и не фиксировать его. Тормоз размыкается только на время поворота выходного звена.
Отличие варианта привода на фиг.10 от привода на фиг.9 состоит в том, что условно замкнутую бесконечную винтовую рабочую поверхность правой и левой направленности образует не винтовая канавка, а выполненные по требуемому закону на поверхности выходного звена 11 винтовые выступы 8 правой и левой направленности, задающие определенный закон движения выходного звена 11. Поэтому переходный участок в этом случае имеет неявный вид, но, как и на фиг.9, он представляет собой отрезок Δh между рабочими винтовыми поверхностями. Для данного варианта привода воздействия внешних силовых факторов на выходное звено 11 нет, поэтому нормально-замкнутый управляемый тормоз отсутствует.
Работает привод по фиг.10 аналогично представленному приводу на фиг.9, за исключением того, что в переходное время выходное звено 11 не требуется фиксировать. Выходное звено вращается по часовой стрелке по определенному закону.
В приводе на фиг.11, в отличие от приводов на фиг.9 и фиг.10, на поверхности выходного звена 11 выполнено несколько условно замкнутых бесконечных винтовых выступов 8 с боковыми рабочими поверхностями правой и левой направленности, составляющими одну группу. Другая группа условно замкнутых дополнительных бесконечных винтовых выступов 4 - направляющих выступов, с боковыми рабочими поверхностями правой и левой направленности выполнена на наружной поверхности подвижного элемента 2. Скользя по направляющим элементам 5 - пальцам, закрепленным в неподвижном звене 1 клинового механизма, рабочие поверхности направляющих выступов 4 придают подвижному элементу 2 и жестко связанному с ним входному звену 3, кроме поступательного движения, еще и вращательное, которое помогает повороту выходного звена 11. В каждой группе условно бесконечные винтовые выступы с боковыми рабочими поверхностями расположены рядами строго друг под другом, на одинаковом расстоянии и имеют одинаковую форму. Момент контакта пальцев 5 и 29 с винтовыми поверхностями выступов происходит одновременно как для неподвижных направляющих элементов 5 с боковыми рабочими поверхностями дополнительных винтовых выступов 4, так и для закрепленных во входном звене 3 и перемещающихся вместе с ним направляющих пальцев 29 с боковыми рабочими поверхностями винтовых выступов 8.
Поворотный привод на фиг.12 в качестве силового механизма содержит два клиновых механизма, свернутых вокруг оси поворота выходного звена и чередующих в зависимости от направления хода подвижного элемента 2 двигателя возможность передавать вращающий момент одному общему выходному звену 11. Эти два механизма имеют также общее неподвижное звено 1 клинового механизма, внутри которого может перемещаться подвижный элемент 2 двигателя. Подвижный элемент 2 жестко связан с входными звеньями 3 и 32 этих двух клиновых механизмов. Входные звенья 3 и 32 имеют винтовые канавки 6 и 33 правой и левой направленности соответственно. Промежуточные звенья 7 и 37 имеют ответные винтовые канавки 8 и 38. Винтовые рабочие поверхности канавок выполнены по требуемому закону, имеют угол подъема значительно больше угла трения и имеют в сечении нужную форму. Винтовые поверхности канавок 6 и 8, выполненные соответственно на входном звене 3 и промежуточном звене 7, представляют собой рабочие поверхности первого свернутого клинового механизма. Винтовые поверхности канавок 33 и 38, выполненные соответственно на входном звене 32 и промежуточном звене 37, представляют собой рабочие поверхности второго свернутого клинового механизма. Для снижения потерь при работе клиновых механизмов звенья 3 и 7 могут быть разделены телами качения 29, расположенными в винтовых канавках 6 и 8, а звенья 32 и 37 могут быть разделены телами качения 35, расположенными в винтовых канавках 33 и 38. Подвижный элемент 2 имеет направляющие пазы 4, задающие закон его движения, и движения жестко связанных с ним входных звеньев 3 и 32. Поверхности этих пазов могут скользить по нескольким направляющим элементам 5, закрепленным в неподвижном звене 1 клинового механизма. На торцевых поверхностях звеньев 3 и 7, 32 и 37 закреплены ограничительные шайбы 30 и 31, 34 и 36 для предотвращения выхода тел качения 29, 35 за пределы области совместного их контакта с винтовыми канавками 6 и 8, 33 и 38. Промежуточное звено 37 опирается на кольцевой ряд тел качения 10, установленных между звеном 37 и вторым неподвижным звеном 9 клинового механизма, жестко связанным со звеном 1. Промежуточное звено 7 опирается на кольцевой ряд тел качения 39, установленных между промежуточными звеньями 7 и 37.
Между промежуточным звеном 7 первого клинового механизма и выходным звеном 11 с помощью неподвижных соединений 12 и 13 установлен механизм одностороннего действия 14, предназначенный для передачи вращающего момента от промежуточного звена 7 выходному звену 11 только в одном направлении. Таким механизмом может служить, например, односторонняя муфта свободного хода или храповой механизм. Аналогично между промежуточным звеном 37 второго клинового механизма и выходным звеном 11 с помощью неподвижных соединений 40 и 42 установлен механизм одностороннего действия 41, предназначенный для передачи вращающего момента от промежуточного звена 37 выходному звену 11 в том же направлении.
Между выходным звеном 11 и неподвижным звеном 9 клинового механизма установлен нормально-замкнутый управляемый тормоз 17 с помощью неподвижных соединений 18 и 19, для того чтобы гарантировать неподвижность выходного звена 11 при воздействии внешних силовых факторов в моменты переключения направления движения подвижного элемента 2. Устройство тормоза аналогично рассмотренному устройству в конструкции привода по фиг.1.
Работает привод по фиг.12 следующим образом.
В верхнюю полость 15 двигателя и одновременно в управляемый тормоз 17, для его размыкания, подается под давлением рабочая среда. Подвижный элемент 2 вместе с входными звеньями 3 и 32, с которыми он жестко связан, начинает двигаться вниз, скользя по направляющим элементам 5. Осевая сила, развиваемая подвижным элементом 2 и передаваемая входному звену 3, и далее через контактные поверхности винтовых канавок 6 и 8 с телами качения 29 промежуточному звену 7, воспринимается кольцевым рядом тел качения 39 и далее через кольцевой ряд тел качения 10 передается неподвижному звену 9 клинового механизма. Осевая сила, развиваемая подвижным элементом 2 и передаваемая входному звену 32, и далее через контактные поверхности винтовых канавок 33 и 38 с телами качения 35 промежуточному звену 37, воспринимается кольцевым рядом тел качения 10. При этом входное звено 3 при своем движении вниз поворачивает промежуточное звено 7 против часовой стрелки и передает вращающий момент через неподвижное соединение 12 механизму одностороннего действия 14. Этот механизм через неподвижное соединение 13 передает вращение незаторможенному выходному звену 11 и связанному с ним затвору арматуры, который поворачивается на определенный угол в зависимости от принятых конструктивных параметров привода. Одновременно входное звено 32 при своем движении вниз поворачивает промежуточное звено 37 по часовой стрелке и передает вращающий момент через неподвижное соединение 40 механизму одностороннего действия 41, который не передает его дальше в этом направлении.
В нижнем положении подвижного элемента 2 датчик хода, установленный в системе управления (на фиг.12 система управления не показана), подает сигнал на реверсирование движения подвижного элемента 2. Во время переключения направления движения подвижного элемента 2 выходное звено 11 неподвижно, так как управляемый тормоз 17 будет замкнут.Теперь рабочая среда под давлением подается в нижнюю полость 16 двигателя и одновременно в управляемый тормоз 17, для его размыкания. Подвижный элемент 2 с входным звеном 3 начинает двигаться вверх. Промежуточное звено 7 начинает поворачиваться в обратную сторону - по часовой стрелке, так как изменились направления осевой и окружной сил и поверхности контакта винтовых канавок 6 и 8 звеньев 3 и 7 с телами качения 29. Но теперь промежуточное звено 7 не может повернуть выходное звено 11, так как механизм одностороннего действия 14 в этом направлении не передает вращающий момент. Одновременно с подвижным элементом 2 двигается вверх и входное звено 32. Промежуточное звено 37 начинает поворачиваться в обратную сторону - против часовой стрелки, так как изменились направления осевой и окружной сил и поверхности контакта винтовых канавок 33 и 38 звеньев 32 и 37 с телами качения 35, и передавать вращающий момент через неподвижное соединение 40 механизму одностороннего действия 41. Этот механизм через неподвижное соединение 42 передает вращение незаторможенному выходному звену 11 и связанному с ним затвору арматуры. При достижении подвижным элементом 2 верхнего положения процесс повторяется до поворота затвора арматуры на необходимый угол. Датчик углового положения затвора или положения выходного звена 11, установленный в системе управления (на фиг.12 система управления и затвор не показаны), подает сигнал на завершение работы привода, и управляемый тормоз 17 замыкается.
Таким образом, когда подвижный элемент 2 движется вниз, первый клиновой механизм совершает рабочий ход, а второй клиновой механизм - холостой ход. При движении подвижного элемента 2 вверх, наоборот, первый клиновой механизм совершает холостой ход, а второй клиновой механизм - рабочий ход. При обоих движениях подвижного элемента 2 выходное звено 11 поворачивается в одну сторону. Получается, что оба движения подвижного элемента 2 являются рабочими. Такое чередование возможности передачи вращающего момента выходному звену 11 между двумя свернутыми клиновыми механизмами позволяет приводу в целом избавиться от необходимости совершать холостой ход и, следовательно, уменьшает время поворота затвора трубопроводной арматуры на необходимый угол.
Вариант привода на фиг.13 отличается от представленного на фиг.12 тем, что механизмы одностороннего действия 14 и 41 установлены между подвижными элементами 2 и 43 двигателя и неподвижным звеном 1 клинового механизма, жестко связанного со вторым неподвижным звеном 9 клинового механизма. Внутри неподвижного звена 1 клинового механизма может перемещаться подвижный элемент 2, связанный через кольцевой ряд тел качения 39 с подвижным элементом 43. Подвижные элементы 2 и 43 могут перемещаться вверх и вниз вместе, и одновременно могут вращаться относительно друг друга благодаря телам качения 39, прижатым сегментами 46, поверхности канавок которых продолжают поверхность круглой канавки, выполненной в подвижном элементе 43. Подвижный элемент 2 жестко связан с входным звеном 3 первого клинового механизма, а подвижный элемент 43 жестко связан с входным звеном 32 второго клинового механизма. Входные звенья 3 и 32 имеют винтовые канавки 6 и 33 правой и левой направленности соответственно. Выходное звено 11 имеет ответные винтовые канавки 8 и 38. Для снижения потерь при работе клиновых механизмов звенья 3 и 11 могут быть разделены телами качения 29, расположенными в винтовых канавках 6 и 8, а звенья 32 и 11 могут быть разделены телами качения 35, расположенными в винтовых канавках 33 и 38. Подвижный элемент 2 имеет дополнительные винтовые пазы 4 - направляющие пазы, задающие закон его движения, и движения жестко связанного с ним входного звена 3 первого клинового механизма. Подвижный элемент 43 также имеет дополнительные винтовые пазы 44 - направляющие пазы, задающие закон его движения, и движения жестко связанного с ним входного звена 32 второго клинового механизма. Поверхности этих направляющих пазов могут скользить по нескольким направляющим элементам 5 и 45, закрепленным в механизмах одностороннего действия 14 и 41 соответственно. В свою очередь эти механизмы с помощью неподвижных соединений 12 и 40 соединены с неподвижным звеном 1 клинового механизма. На торцевых поверхностях звеньев 3, 11, 32 закреплены ограничительные шайбы 30 и 31, 34 и 36 для предотвращения выхода тел качения 29, 35 за пределы области совместного их контакта с винтовыми канавками 6 и 8, 33 и 38. Выходное звено 11 опирается на кольцевой ряд тел качения 10, установленных между ним и неподвижным звеном 9 клинового механизма. Для данного варианта привода воздействия внешних силовых факторов на выходное звено 11 нет, поэтому нормально-замкнутый управляемый тормоз отсутствует.
Работает привод по фиг.13 следующим образом.
В верхнюю полость 15 двигателя подается под давлением рабочая среда. Подвижные элементы 2 и 43 вместе с входными звеньями 3 и 32 начинают двигаться вниз, скользя по направляющим элементам 5 и 45. Осевая сила, развиваемая подвижным элементом 2 и передаваемая входному звену 3, и далее через контактные поверхности винтовых канавок 6 и 8 с телами качения 29 выходному звену 11, воспринимается кольцевым рядом тел качения 10 и передается неподвижному звену 9 клинового механизма. Входное звено 3 при своем движении вниз поворачивает выходное звено 11 против часовой стрелки. Возникающий при этом реактивный момент передается неподвижному звену 1 клинового механизма за счет связанного с ним механизма одностороннего действия 14. Одновременно с этим подвижный элемент 43 с жестко связанным с ним входным звеном 32, перемещаясь вниз, совершает свободное вращение против часовой стрелки, благодаря кольцевому ряду тел качения 39 и механизму одностороннего действия 41.
В нижнем положении подвижных элементов 2 и 43 датчик хода, установленный в системе управления (на фиг.13 система управления не показана), подает сигнал на реверсирование движения подвижных элементов 2 и 43. Во время переключения перемещений вверх и вниз подвижных элементов 2 и 43 выходное звено 11 не требуется фиксировать. Теперь рабочая среда под давлением подается в нижнюю полость 16 двигателя. Подвижные элементы 43 и 2 вместе с входными звеньями 32 и 3 начинают двигаться вверх, скользя по направляющим элементам 45 и 5. Осевая сила, развиваемая подвижным элементом 43 и передаваемая входному звену 32, и далее через контактные поверхности винтовых канавок 33 и 38 с телами качения 35 выходному звену 11, воспринимается кольцевым рядом тел качения 10 и передается неподвижному звену 9 клинового механизма. Входное звено 32 при своем движении вверх поворачивает выходное звено 11 против часовой стрелки. Возникающий при этом реактивный момент передается неподвижному звену 1 клинового механизма за счет связанного с ним механизма одностороннего действия 41. Одновременно с этим подвижный элемент 2 с жестко связанным с ним входным звеном 3, перемещаясь вверх, совершает свободное вращение против часовой стрелки, благодаря кольцевому ряду тел качения 39 и механизму одностороннего действия 14. При достижении подвижными элементами 43 и 2 верхнего положения процесс повторяется до поворота затвора арматуры на необходимый угол. Датчик углового положения затвора или положения выходного звена 11, установленный в системе управления (на фиг.13 система управления и затвор не показаны), подает сигнал на завершение работы привода.
Вариант привода на фиг.14 отличается от представленного на фиг.12 тем, что содержит два двигателя. Привод имеет неподвижное звено 1 первого клинового механизма (например, гидроцилиндр первого двигателя), внутри которого может перемещаться подвижный элемент 2 (первый поршень). Кроме этого привод имеет неподвижное звено 9 второго клинового механизма, которое может являться одновременно неподвижным звеном второго двигателя (например, корпусом гидроцилиндра), жестко связанное с неподвижным звеном 1 первого клинового механизма, внутри которого может перемещаться подвижный элемент 43 (второй поршень). Перемещение подвижных элементов 2 и 43 ограничено вспомогательным неподвижным звеном 48, также жестко связанным со звеном 1 первого клинового механизма и неподвижным звеном 9 второго клинового механизма. Подвижный элемент 2 жестко связан с входным звеном 3 первого клинового механизма, а подвижный элемент 43 жестко связан с входным звеном 32 второго клинового механизма. Входные звенья 3 и 32 имеют винтовые канавки 6 и 33 одинаковой направленности. Промежуточные звенья 7 и 37 имеют ответные винтовые канавки 8 и 38. Для снижения потерь при работе клиновых механизмов звенья 3 и 7 могут быть разделены телами качения 29, расположенными в винтовых канавках 6 и 8, а звенья 32 и 37 могут быть разделены телами качения 35, расположенными в винтовых канавках 33 и 38. Подвижный элемент 2 имеет дополнительные винтовые пазы 4 - направляющие пазы, задающие закон его движения, и движения жестко связанного с ним входного звена 3. Подвижный элемент 43 имеет дополнительные винтовые пазы 44 - направляющие пазы, задающие закон его движения, и движения жестко связанного с ним входного звена 32. Поверхности этих направляющих пазов 4 и 44 могут скользить по нескольким направляющим элементам 5 и 45, закрепленным в неподвижных звеньях 1 и 9. На торцевых поверхностях звеньев 3 и 7, 32 и 37 закреплены ограничительные шайбы 30 и 31, 34 и 36 для предотвращения выхода тел качения 29 и 35 за пределы области совместного их контакта с винтовыми канавками 6 и 8, 33 и 38. Промежуточные звенья 7 и 37 опираются на кольцевые ряды тел качения 39 и 47, установленных между этими звеньями и вспомогательным неподвижным звеном 48, жестко связанным с неподвижными звеньями 1 и 9. Выходное звено 11 опирается на кольцевой ряд тел качения 10, установленных между ним и неподвижным звеном 9 второго клинового механизма.
Между промежуточным звеном 7 первого клинового механизма и выходным звеном 11 с помощью неподвижных соединений 12 и 13 установлен механизм одностороннего действия 14, предназначенный для передачи вращающего момента от промежуточного звена 7 выходному звену 11 только в одном направлении. Таким механизмом может служить, например, односторонняя муфта свободного хода или храповой механизм. Аналогично между промежуточным звеном 37 второго клинового механизма и выходным звеном 11 с помощью неподвижных соединений 40 и 42 установлен второй механизм одностороннего действия 41, предназначенный для передачи вращающего момента от звена 37 выходному звену 11 в том же направлении.
Между выходным звеном 11 и неподвижным звеном 9 второго клинового механизма установлен нормально-замкнутый управляемый тормоз 17 с помощью неподвижных соединений 18 и 19, для того чтобы гарантировать неподвижность выходного звена 11 при воздействии внешних силовых факторов в моменты переключения направления движения подвижных элементов 2 и 43 и при холостом ходе. Устройство тормоза аналогично рассмотренному устройству в конструкции привода по фиг.1.
Работает привод по фиг.14 следующим образом.
В верхнюю полость 15 первого двигателя и нижнюю полость 49 второго двигателя, а также одновременно в управляемый тормоз 17, для его размыкания, подается под давлением рабочая среда. Подвижный элемент 2 вместе с входным звеном 3 начинает двигаться вниз, скользя по направляющим элементам 5. Осевая сила, развиваемая подвижным элементом 2 и передаваемая входному звену 3, и далее через контактные поверхности винтовых канавок 6 и 8 с телами качения 29 промежуточному звену 7, воспринимается кольцевым рядом тел качения 39 и далее через вспомогательное неподвижное звено 48 передается неподвижному звену 9 второго клинового механизма. Входное звено 3 при своем движении вниз поворачивает промежуточное звено 7 против часовой стрелки и передает вращающий момент через неподвижное соединение 12 механизму одностороннего действия 14. Этот механизм через неподвижное соединение 13 передает вращение незаторможенному выходному звену 11 и связанному с ним затвору арматуры, который поворачивается на определенный угол в зависимости от принятых конструктивных параметров привода. В это же время подвижный элемент 43 вместе с входным звеном 32 перемещается вверх. Промежуточное звено 37 начинает поворачиваться по часовой стрелке, при этом оно не может повернуть выходное звено 11, так как механизм одностороннего действия 41 в этом направлении не передает вращающий момент.
Когда подвижные элементы 2 и 43 достигают вспомогательного неподвижного звена 48, ограничивающего их дальнейшее движение, датчик хода, установленный в системе управления (на фиг.14 система управления не показана), подает сигнал на реверсирование движения подвижных элементов. Во время переключения направления движения подвижных элементов 2 и 43 выходное звено 11 неподвижно, так как управляемый тормоз 17 будет замкнут. Теперь рабочая среда под давлением подается в сообщающиеся между собой полости 16 двигателей и одновременно в управляемый тормоз 17, для его размыкания. Подвижный элемент 2 с входным звеном 3 начинает двигаться вверх. Промежуточное звено 7 начинает поворачиваться в обратную сторону - по часовой стрелке, при этом оно не может повернуть выходное звено 11, так как механизм одностороннего действия 14 в этом направлении не передает вращающий момент. В это же время подвижный элемент 43 вместе с входным звеном 32 начинает двигаться вниз, скользя по направляющим элементам 45. Осевая сила, развиваемая подвижным элементом 43 и передаваемая звену 32, и далее через контактные поверхности винтовых канавок 33 и 38 с телами качения 35 промежуточному звену 37, воспринимается кольцевым рядом тел качения 47 и далее через вспомогательное неподвижное звено 48 передается неподвижному звену 9 второго клинового механизма. Входное звено 32 при своем движении вниз поворачивает промежуточное звено 37 против часовой стрелки и передает вращающий момент через неподвижное соединение 40 механизму одностороннего действия 41. Этот механизм через неподвижное соединение 42 передает вращение незаторможенному выходному звену 11 и связанному с ним затвору арматуры, который поворачивается на определенный угол в зависимости от принятых конструктивных параметров привода. Процесс движения подвижных элементов 2 и 43 повторяется до поворота затвора арматуры на необходимый угол.
Поворотный привод на фиг.15 в качестве силового механизма содержит шесть клиновых механизмов, свернутых вокруг оси поворота выходного звена и чередующих в зависимости от направления хода подвижного элемента 2, общего для трех двигателей, возможность передавать вращающий момент одному общему выходному звену 11. Эти шесть механизмов имеют общее неподвижное звено 1 клинового механизма, внутри которого может перемещаться общий подвижный элемент 2, жестко соединенный через шток 50 с тремя поршнями 51, 52, 53 трех двигателей. Подвижный элемент 2 жестко связан с входными звеньями 3, 32 и 54, каждое из которых является общим для двух клиновых механизмов. На внутренней поверхности каждого входного звена выполнены винтовые канавки 6, 55 и 56 правой направленности, а на внешней поверхности - канавки 33, 57 и 58 левой направленности. Ответные винтовые канавки 8, 59 и 60 правой направленности выполнены на промежуточных звеньях 7, 61 и 62. Ответные винтовые канавки 38, 63 и 64 левой направленности выполнены на промежуточных звеньях 37, 65 и 66. Винтовые рабочие поверхности канавок выполнены по требуемому закону, имеют угол подъема значительно больше угла трения и имеют в сечении нужную форму. Винтовые поверхности канавок 6 и 8, 55 и 59, 56 и 60, выполненные соответственно на входном звене 3 и промежуточном звене 7, на входном звене 32 и промежуточном звене 61, на входном звене 54 и промежуточном звене 62, представляют собой рабочие поверхности первого (на фиг.15 обозначен как I), второго (II) и третьего (III) свернутого клинового механизма. Винтовые поверхности канавок 33 и 38, 57 и 63, 58 и 64, выполненные соответственно на входном звене 3 и промежуточном звене 37, на входном звене 32 и промежуточном звене 65, на входном звене 54 и промежуточном звене 66, представляют собой рабочие поверхности четвертого (на фиг.15 обозначен как IV), пятого (V) и шестого (VI) свернутого клинового механизма. Таким образом, у шести клиновых механизмов - три входных звена.
Аналогично приводам, представленным на фиг.12, фиг.13, фиг.14, для снижения потерь при работе клиновых механизмов их звенья могут быть разделены телами качения 29, расположенными в винтовых канавках; на торцевых поверхностях звеньев закреплены ограничительные шайбы 30 и 31, 34 и 36 для предотвращения выхода тел качения за пределы области совместного их контакта с винтовыми канавками; промежуточные звенья опираются на кольцевые ряды тел качения 10, установленных между ними, а также между промежуточным звеном 66 и неподвижным звеном 1 клинового механизма. Подвижный элемент 2 имеет направляющие пазы 4, задающие закон его движения, и движения жестко связанных с ним входных звеньев 3, 32 и 54. Поверхности этих пазов могут скользить по нескольким направляющим элементам 5, закрепленным в неподвижном звене 1.
Между промежуточным звеном 7 первого клинового механизма и выходным звеном 11 с помощью неподвижных соединений 12 и 13 установлен механизм одностороннего действия 14, предназначенный для передачи вращающего момента от промежуточного звена 7 выходному звену 11 только в одном направлении. Таким механизмом может служить, например, односторонняя муфта свободного хода или храповой механизм. Механизм одностороннего действия 67 второго клинового механизма установлен между промежуточным звеном 61 и выходным звеном 11; механизм одностороннего действия 68 третьего клинового механизма установлен между промежуточным звеном 62 и выходным звеном 11; механизм одностороннего действия 41 четвертого клинового механизма установлен между промежуточным звеном 37 и выходным звеном 11; механизм одностороннего действия 69 пятого клинового механизма установлен между звеном промежуточным 65 и выходным звеном 11; механизм одностороннего действия 70 шестого клинового механизма установлен между промежуточным звеном 66 и выходным звеном 11. Все механизмы одностороннего действия передают вращающий момент в одном и том же направлении.
Работает привод по фиг.15 следующим образом.
В верхнюю полость 15 первого двигателя, верхнюю полость 49 второго линейного двигателя и верхнюю полость 71 третьего линейного двигателя подается под давлением рабочая среда. Три поршня 51, 52, 53 трех двигателей, жестко соединенные через шток 50 с подвижным элементом 2, начинают двигаться вниз. При этом подвижный элемент 2 скользит по направляющим элементам 5. Вместе с подвижным элементом 2 начинают двигаться вниз жестко связанные с ним входные звенья 3, 32 и 54. Промежуточные звенья 7, 61 и 62 поворачиваются против часовой стрелки и передают вращающий момент через неподвижные соединения 12 механизмам одностороннего действия 14, 67 и 68. Эти механизмы через неподвижные соединения 13 передают вращение выходному звену 11 и связанному с ним затвору арматуры, который поворачивается на определенный угол в зависимости от принятых конструктивных параметров привода. Одновременно входные звенья 3, 32 и 54 при своем движении вниз поворачивают промежуточные звенья 37, 65 и 66 по часовой стрелке и передают вращающий момент через неподвижные соединения механизмам одностороннего действия 41, 69 и 70, которые не передают его дальше в этом направлении.
Осевая сила, развиваемая тремя двигателями и передаваемая входным звеньям 3, 32 и 54, и далее, через контактные поверхности винтовых канавок с телами качения промежуточным звеньям, воспринимается кольцевыми рядами тел качения 10 и передается неподвижному звену 1.
В нижнем положении подвижного элемента 2 датчик хода, установленный в системе управления (на фиг.15 система управления не показана), подает сигнал на реверсирование движения подвижного элемента 2. Для данного варианта привода воздействия внешних силовых факторов на выходное звено 11 нет, поэтому нормально-замкнутый управляемый тормоз отсутствует. Во время переключения направления движения подвижного элемента 2 выходное звено 11 не требуется фиксировать. Теперь рабочая среда под давлением подается в нижнюю полость 16 первого двигателя, нижнюю полость 72 второго двигателя и нижнюю полость 73 третьего двигателя. Вместе с подвижным элементом 2 начинают двигаться вверх жестко связанные с ним входные звенья 3, 32 и 54. Промежуточные звенья 7, 61 и 62 начинают поворачиваться в обратную сторону - по часовой стрелке, так как изменились направления осевой и окружной сил и поверхности контакта винтовых канавок с телами качения. Но теперь промежуточные звенья 7, 61 и 62 не могут повернуть выходное звено 11, так как механизмы одностороннего действия 14, 67 и 68 в этом направлении не передают вращающий момент. Одновременно входные звенья 3, 32 и 54 при своем движении вверх поворачивают промежуточные звенья 37, 65 и 66 в обратную сторону - против часовой стрелки, так как изменились направления осевой и окружной сил и поверхности контакта винтовых канавок с телами качения, и передают вращающий момент через неподвижные соединения 12 механизмам одностороннего действия 41, 69 и 70. Эти механизмы через неподвижные соединения 13 передают вращение выходному звену 11 и связанному с ним затвору арматуры. При достижении подвижным элементом 2 верхнего положения процесс повторяется до поворота затвора арматуры на необходимый угол. Датчик углового положения затвора или положения выходного звена 11, установленный в системе управления (на фиг.15 система управления и затвор не показаны), подает сигнал на завершение работы привода.
Таким образом, когда подвижный элемент 2 движется вниз, первый, второй и третий клиновые механизмы совершают рабочий ход, а четвертый, пятый и шестой клиновые механизмы - холостой ход. При движении подвижного элемента 2 вверх, наоборот, первый, второй и третий клиновые механизмы совершают холостой ход, а четвертый, пятый и шестой клиновые механизмы - рабочий ход. При обоих движениях подвижного элемента 2 выходное звено 11 поворачивается в одну сторону. Оба движения подвижного элемента 2 являются рабочими.
Математическая модель привода по фиг.1 позволила определить изменение основных параметров привода для различных вариантов сочетаний диаметра тел качения 29, диаметра окружности, на которой они расположены, угла давления тел качения, угла подъема винтовых канавок в звеньях 3 и 7, количества двойных ходов подвижного элемента 2.
Расчет привода проводился для шарового крана DN 1000 мм, у которого шаровой затвор поворачивается на 90° за 60 с при давлении рабочей среды в системе привода 2,5 МПа (требования соответствуют - "Общая техническая спецификация ОТС-ЗРА-98 Запорно-регулирующая арматура РАО "Газпром", 1998 г.). Максимальный вращающий момент для шарового крана DN 1000 мм равен Т=142300 Нм (Actuator models: HT 255-2/200 S GH, HT 275-2/200 S GH, HT 300-2/200 S GH, MT 255-2/200 S GH, MT 275-2/200 S GH, MT 300-2/200 S GH Bulletin №91-001 фирмы Ledeen). Расчет проводился со следующими конструктивными ограничениями: 1) расчетное количество заходов винтовых канавок не менее 3 для обеспечения симметричности нагружения звеньев 3 и 7; 2) расчетное количество тел качения в одной канавке не менее 2 и не более 10 для повышения надежности привода и приемлемой равномерности нагружения шаров; 3) общее количество тел качения не менее 6; 4) диаметр подвижного элемента - целое число; 5) диаметр корпуса Dк неподвижного элемента больше диаметра Dп подвижного элемента и больше диаметра окружности расположения шаров Dpw.
Для получения общей картины изменения параметров привода рассмотрены шесть вариантов, в которых варьировались: угол давления тел качения (45° и 60°), угол подъема винтовых канавок (30°, 45° и 60°), диаметр тел качения (Dw=16, 18…34 мм), диаметр окружности расположения тел качения (Dpw=320, 340…480 мм), количество двойных ходов поршня (mx=1, 2…11).
Результаты расчета представлены на графиках, показанных на фиг.16…фиг.21.
Анализ графиков показал, что для принятого привода в указанном диапазоне параметров от конструктивных ограничений зависят величины диаметра подвижного элемента и условного объема привода. Это позволяет принять оптимальные значения указанных параметров. При выборе привода в качестве главного параметра выгоднее принимать металлоемкость привода (объем привода), а не диаметр Dп подвижного элемента 2, или высоты h, hm.
Для оценки и сравнения габаритов и массы привода по фиг.1 с приводом модели MT255-2/200-S-GH фирмы Ledeen был выполнен эскизный проект привода по фиг.1, внешний вид которого показан на фиг.22, со следующими расчетными параметрами:
- угол давления в контакте шаров с винтовыми канавками α=60°;
- угол подъема винтовых канавок ψ=60°;
- диаметр шара Dw=16 мм;
- диаметр окружности, на которой расположены тела качения, Dpw=405 мм;
- число двойных ходов 3.
Масса приводов:
MT255-2/200-S-GH - 1753 кг;
Привод по фиг.1 - 1026 кг.
Следует отметить, что, безусловно, представленное изобретение не ограничено вышеописанными вариантами конструкций и может приобретать различные модификации, не отступая от сути изобретения.
Привод может быть изготовлен в условиях серийного производства на существующем оборудовании машиностроительного завода и не требует уникального оборудования и инструментов. В конструкции привода используются обычные конструкционные углеродистые и малолегированные стали, уплотнения для пневмо- или гидроцилиндров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ МИНИ-ПРИВОД ПЕТЛЕОБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2519612C2 |
| АДАПТАЦИОННЫЙ ШАРИКОВИНТОВОЙ ПРИВОД ВАСИЛЬЕВА | 2003 |
|
RU2238456C1 |
| ТРАНСПОРТНЫЙ УНИВЕРСАЛЬНЫЙ ВАРИАТОР АВТОМАТИЧЕСКОГО ДЕЙСТВИЯ "ТРАНСУНВАРТОР-АВТОМАТ" | 1992 |
|
RU2047023C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ВИНТОВОГО ДВИЖЕНИЯ В ОДНОСТОРОННЕЕ ВРАЩАТЕЛЬНОЕ | 1993 |
|
RU2082048C1 |
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| СПОСОБ МЕХАНИЗМА ВЗАИМОДЕЙСТВИЯ ТЕЛ ПО ПЛОСКОСТИ УЗЛА ЗАТВОРА КЛИНОВОЙ ЗАДВИЖКИ | 2020 |
|
RU2730203C1 |
| МЕХАНИЗМ С ВЫСТОЕМ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2282082C1 |
| Стенд для испытания карданных передач | 1989 |
|
SU1712804A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМЕХАНИЗМ В.И.СМИРНОВА | 1992 |
|
RU2102826C1 |
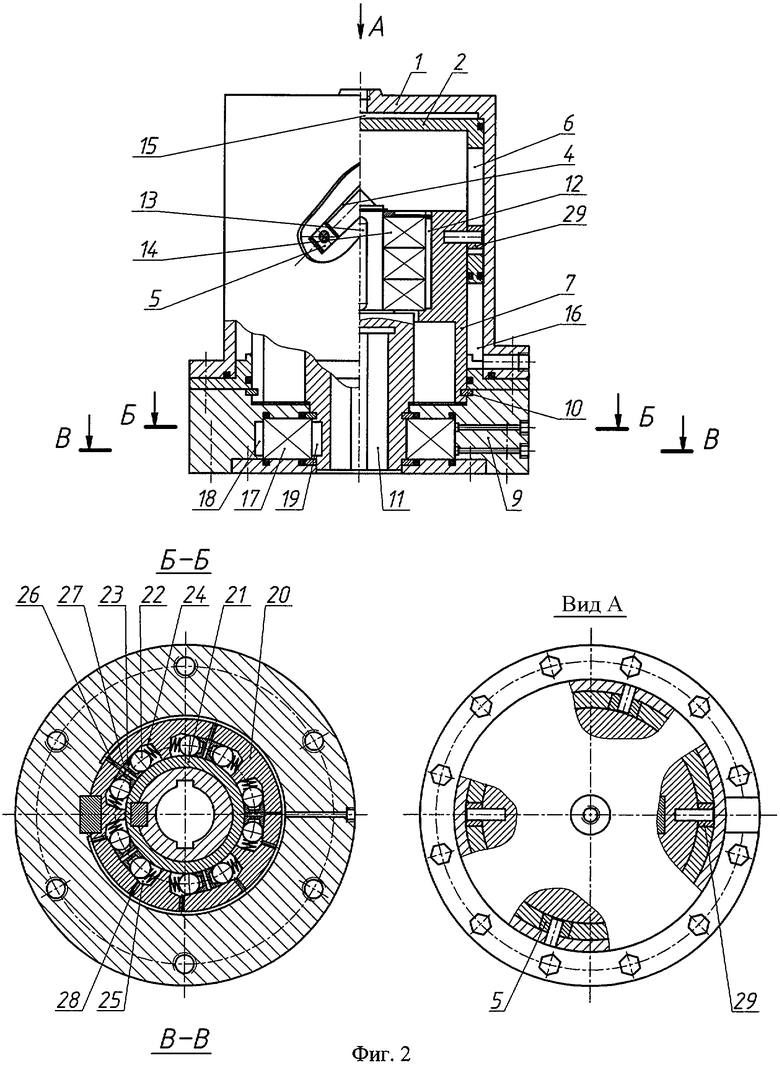
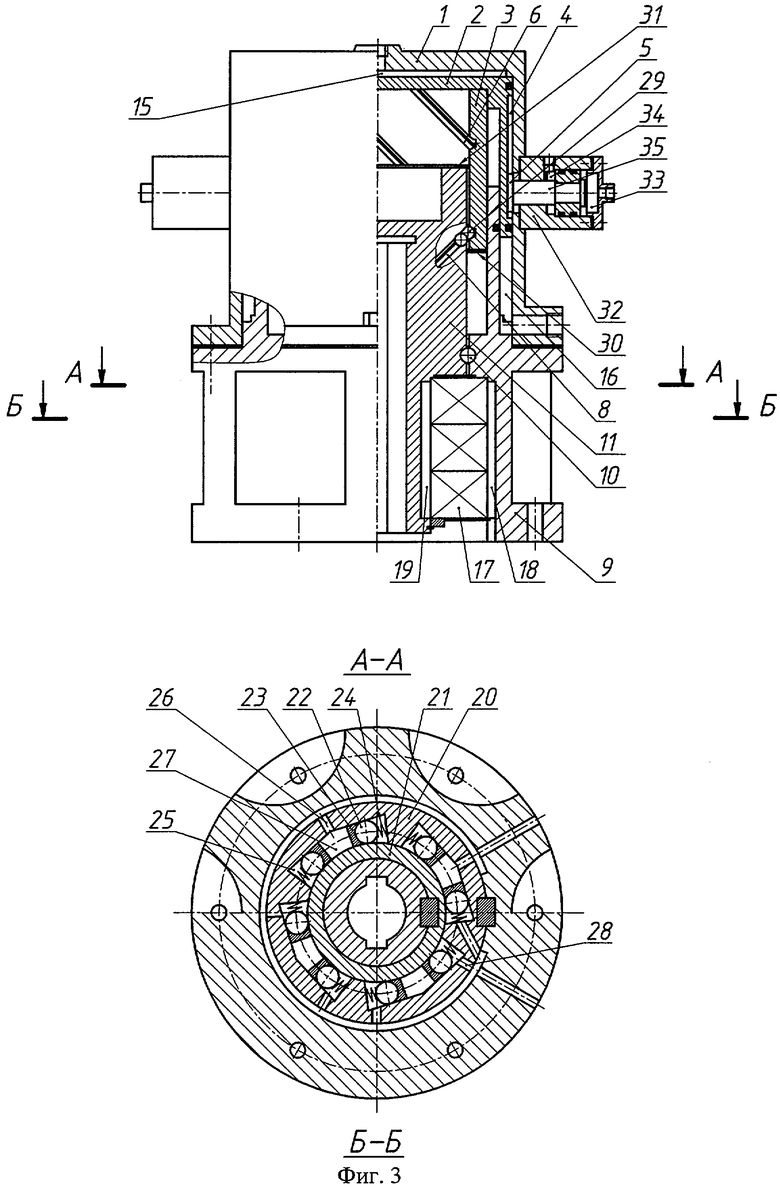
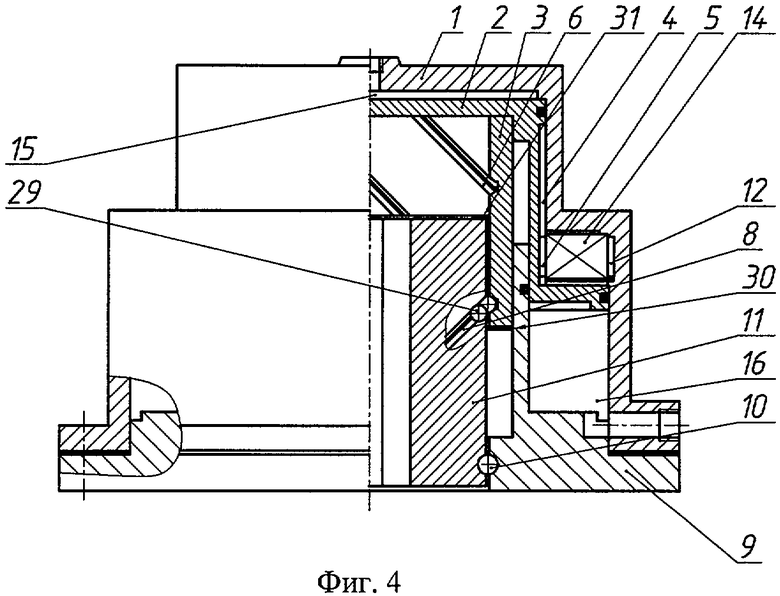
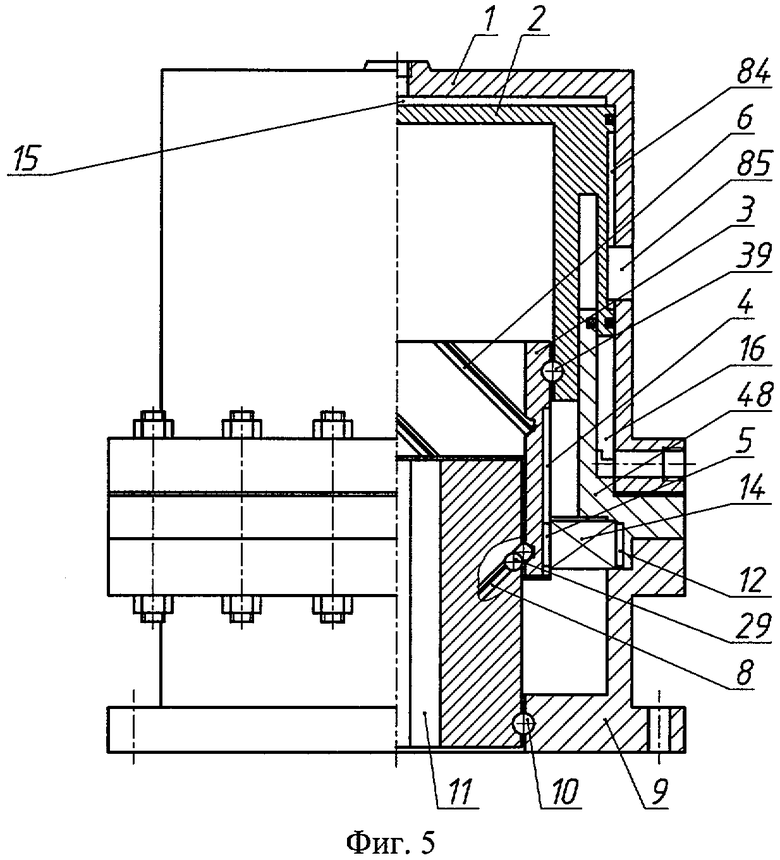
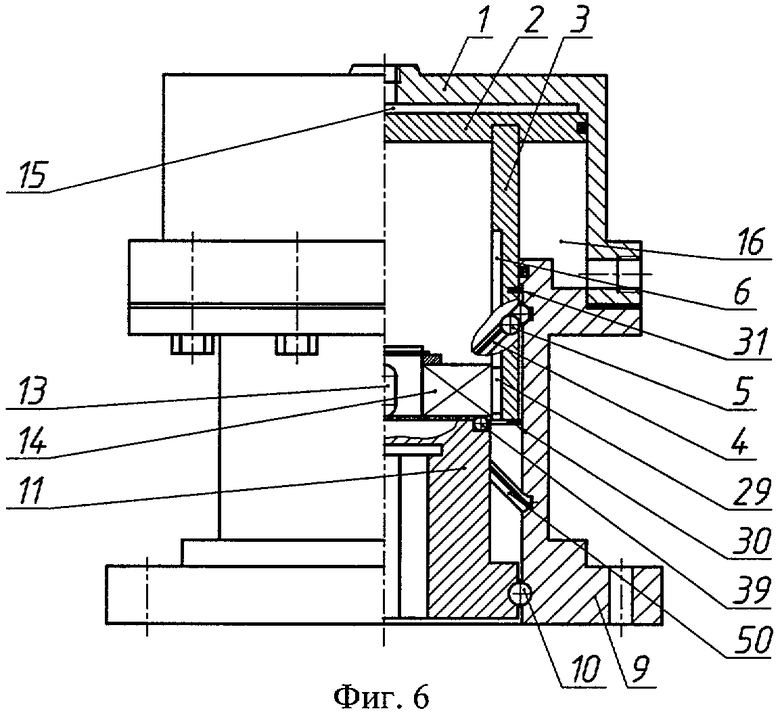
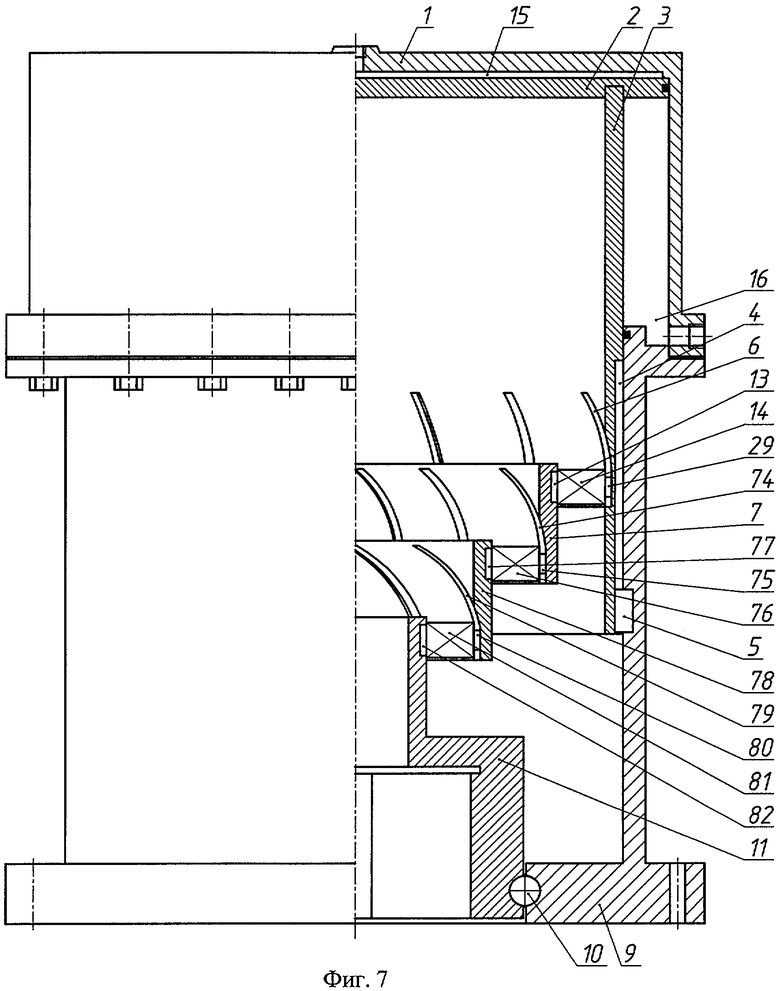
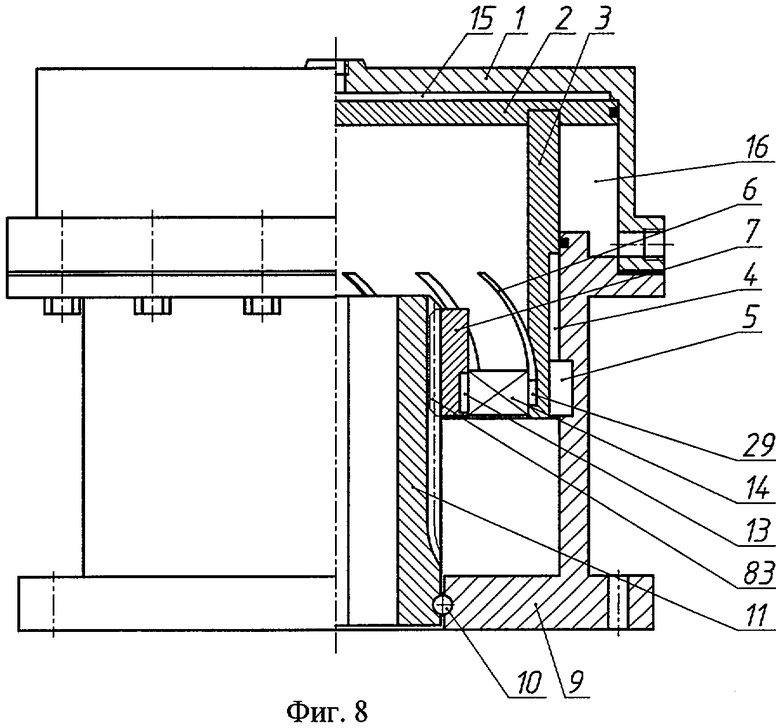
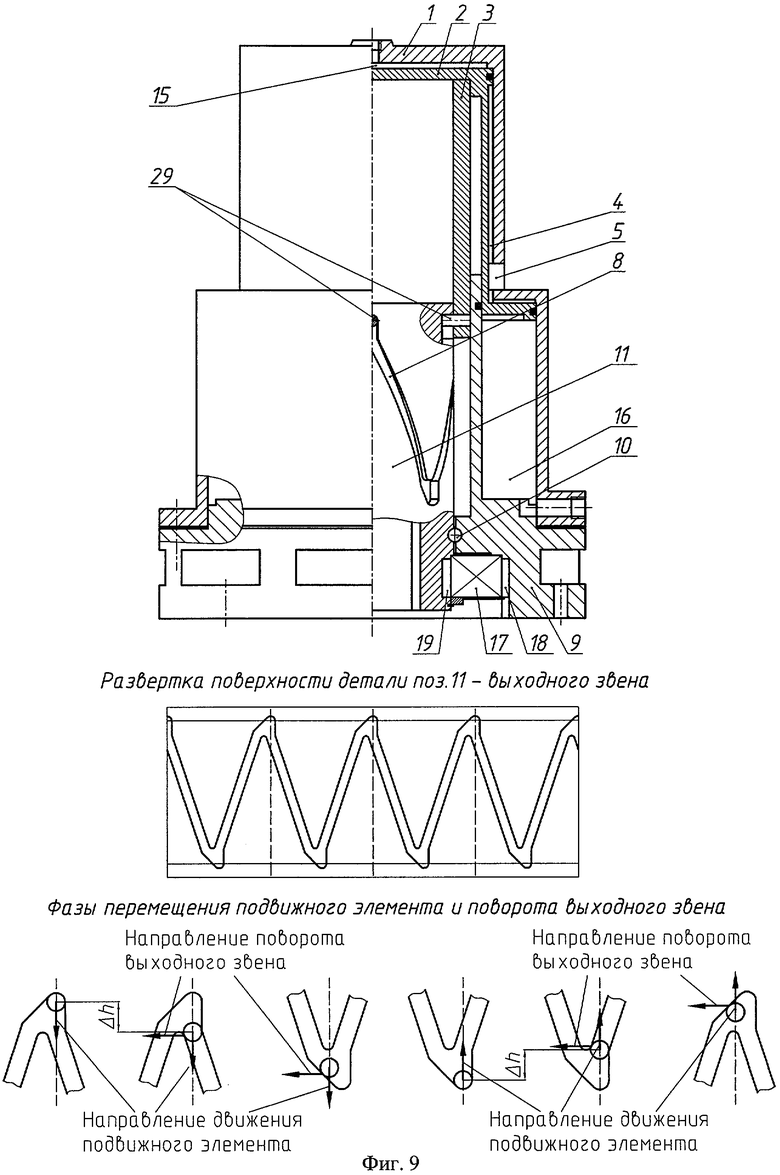
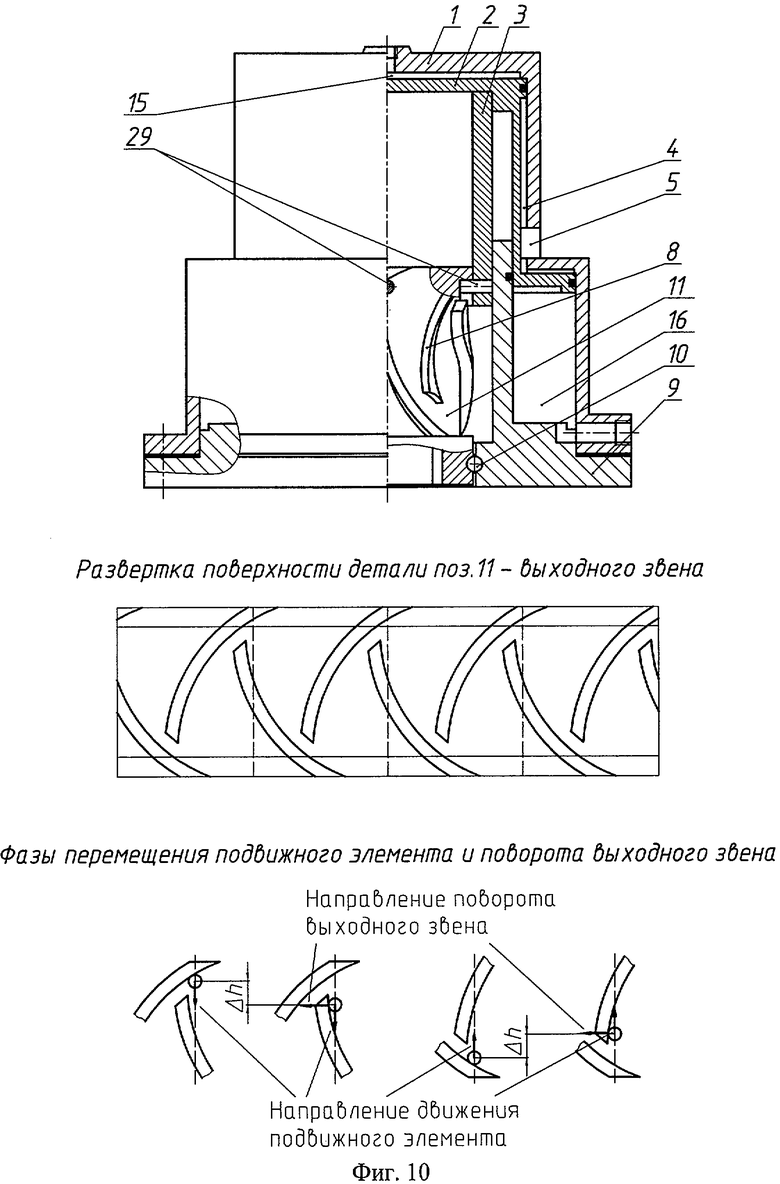
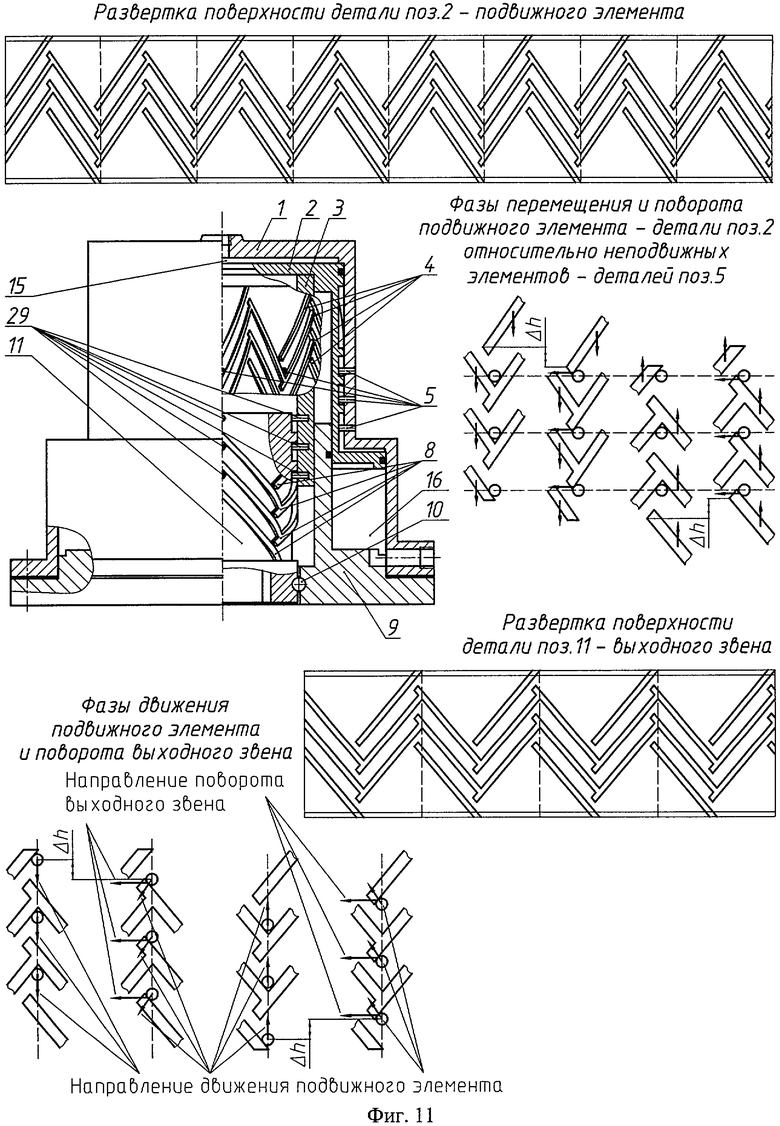
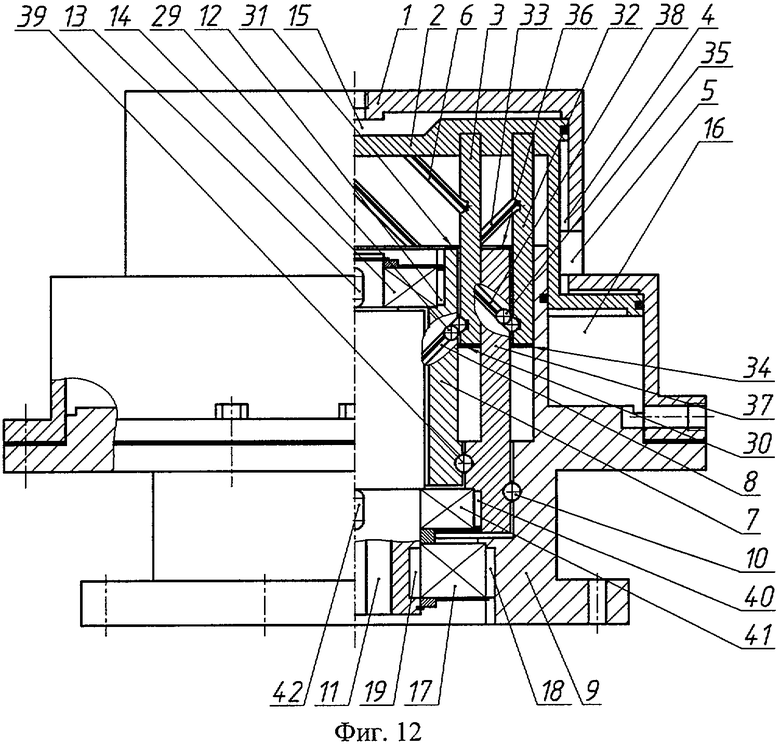
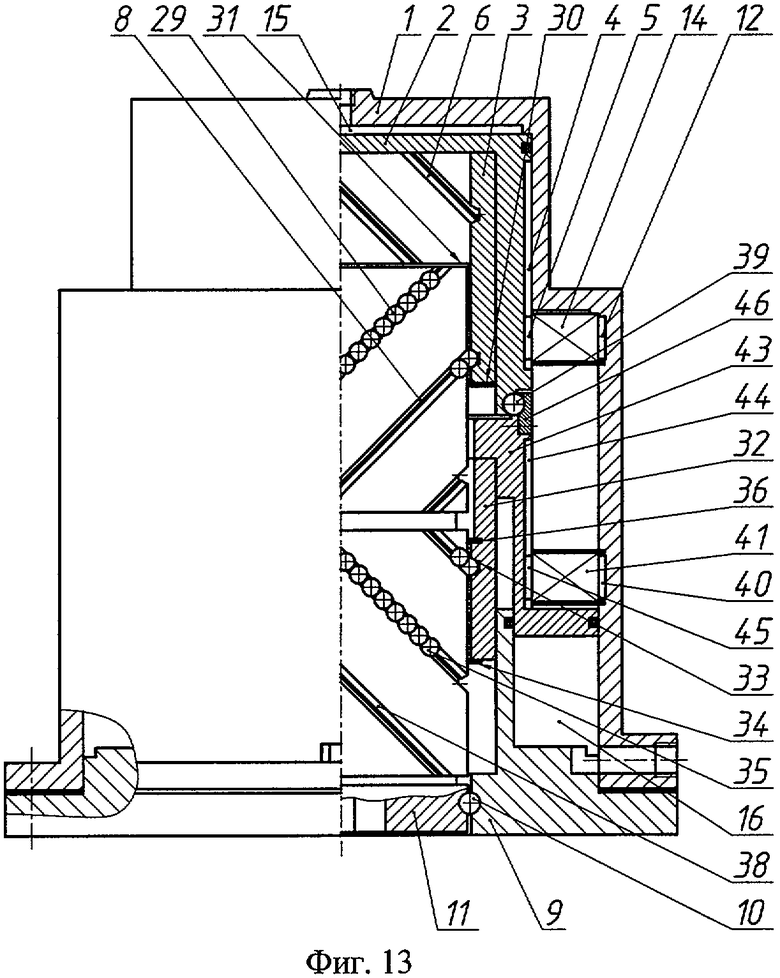
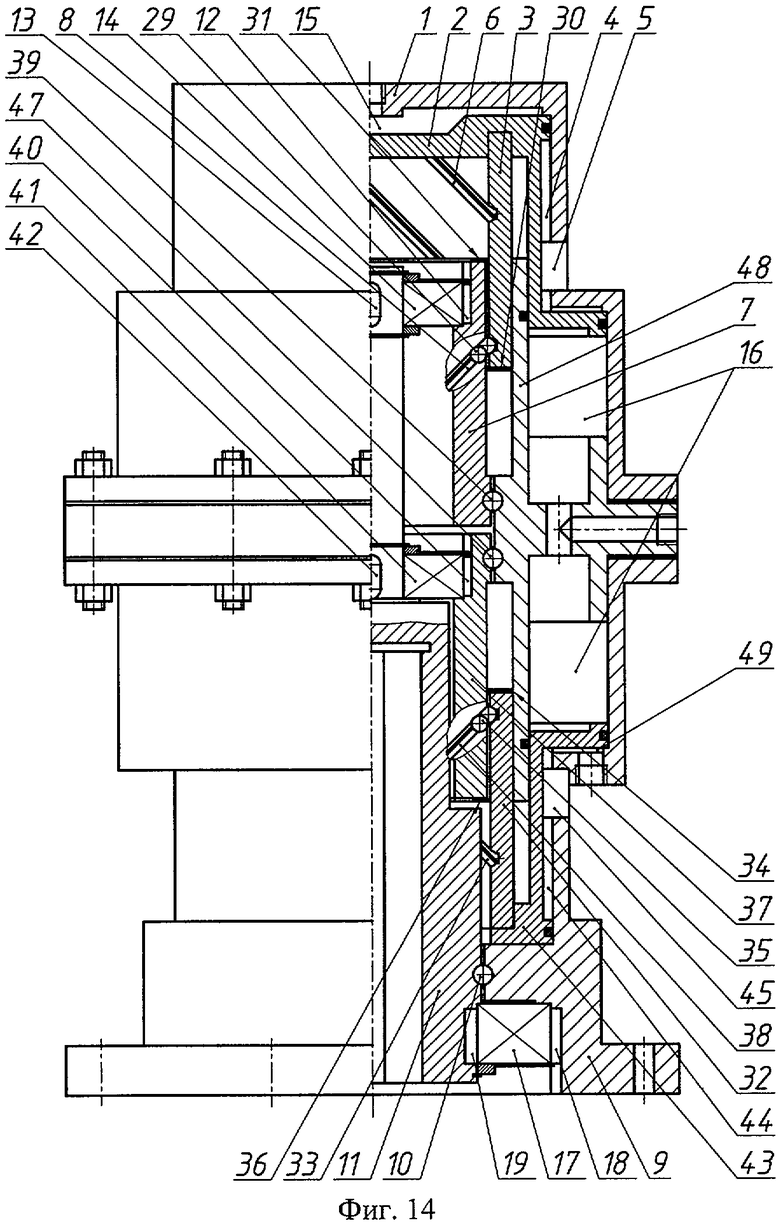
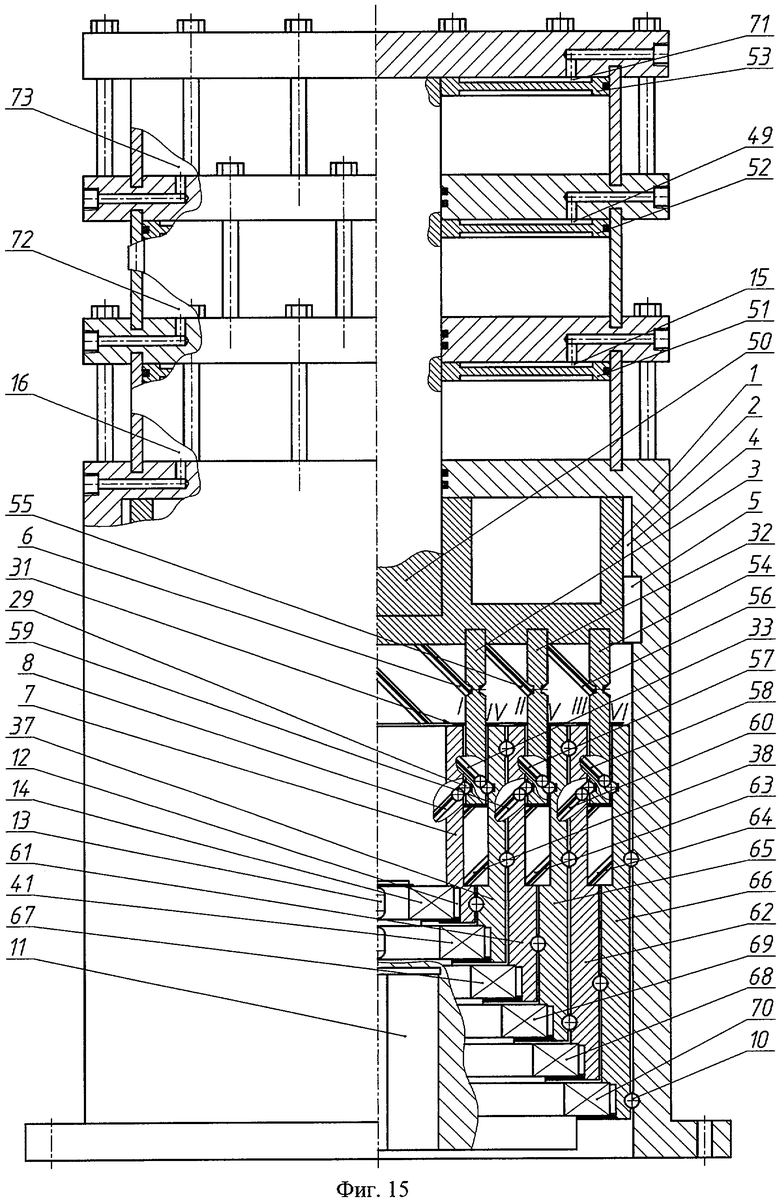
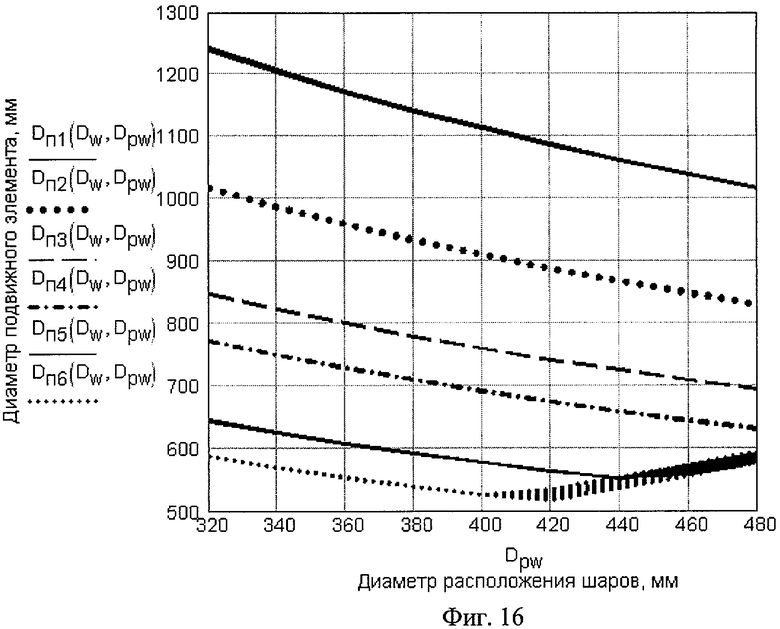
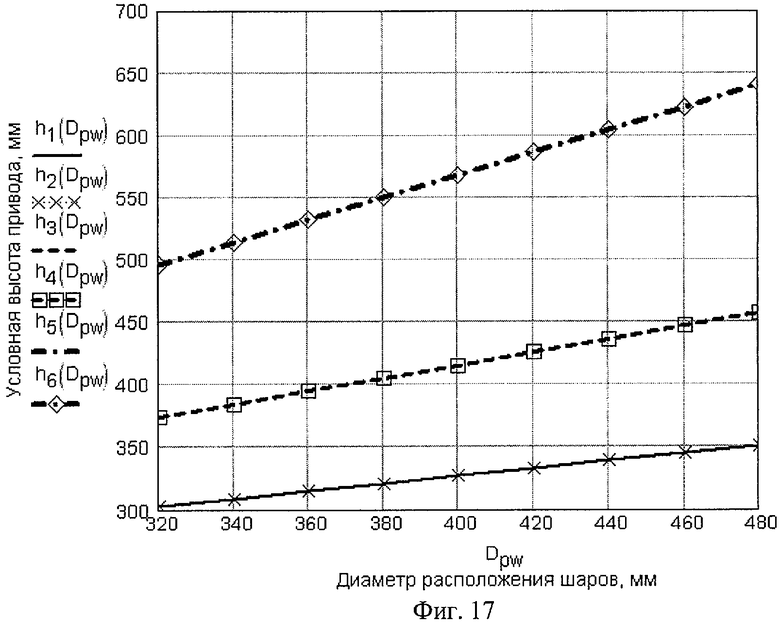
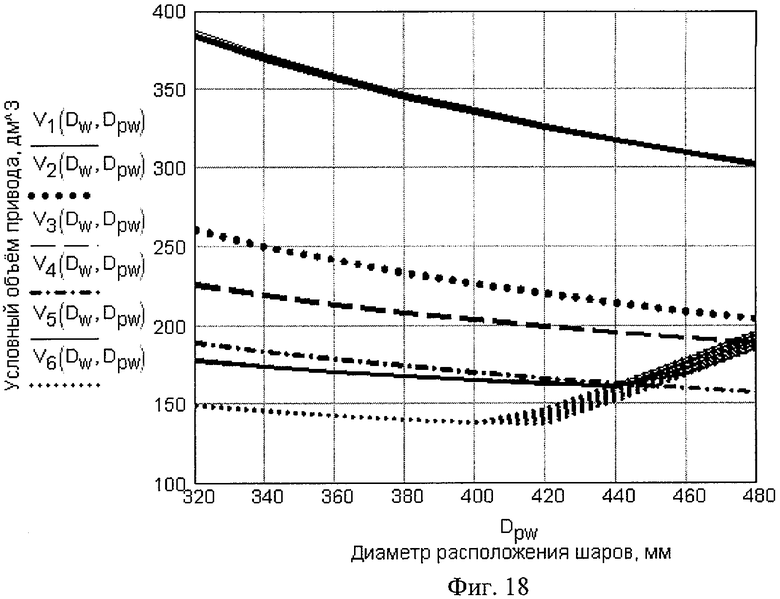
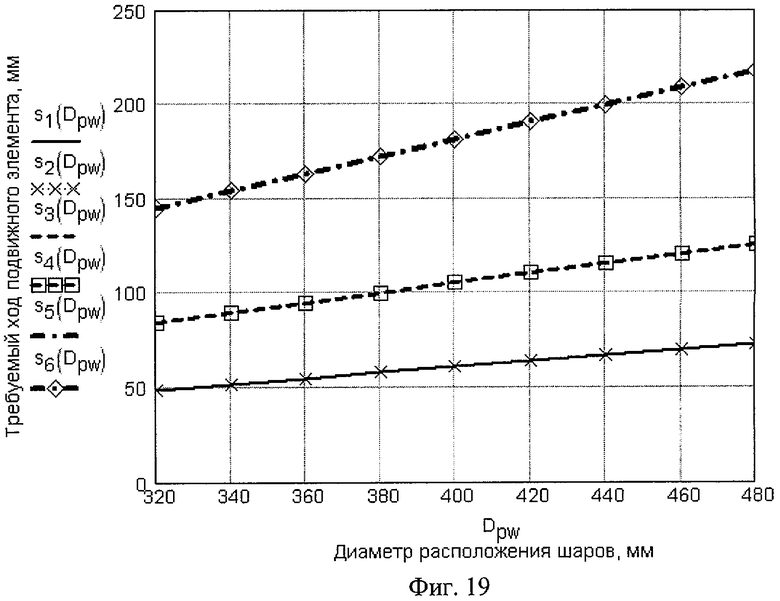
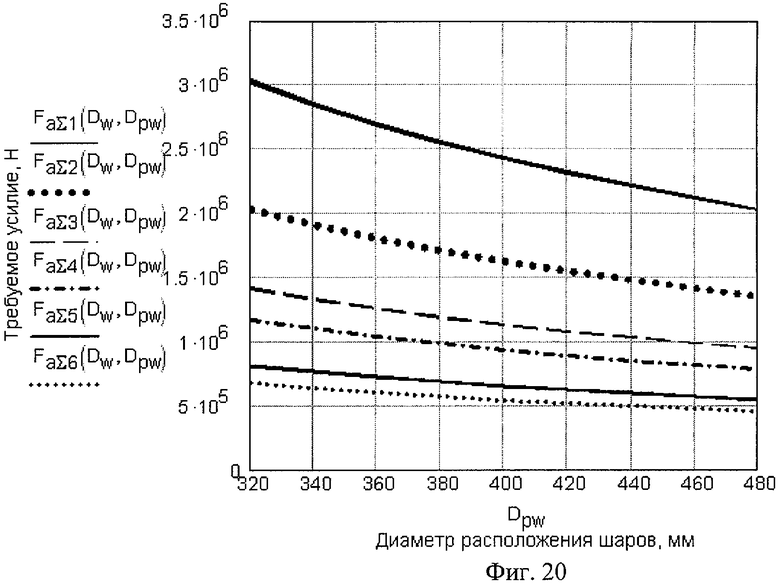
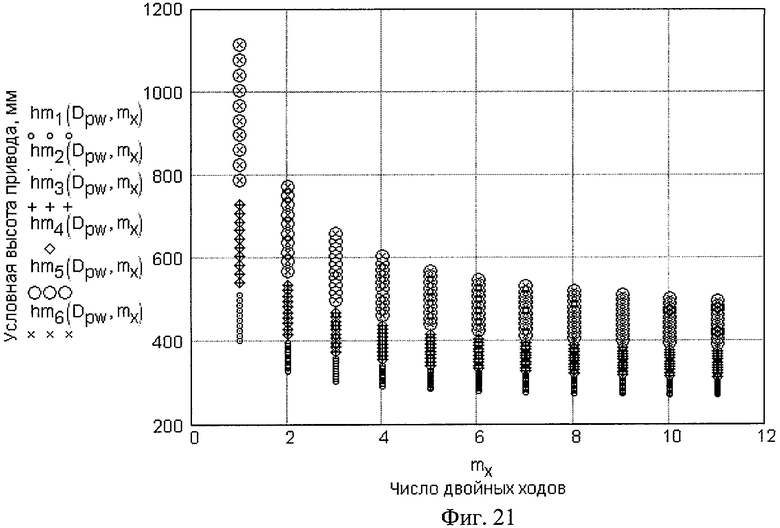
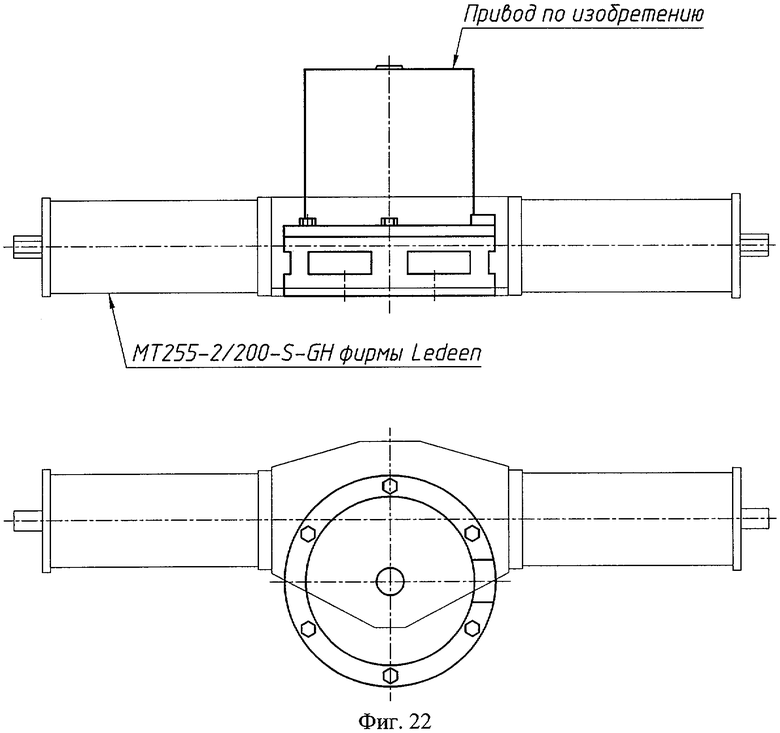
Изобретение относится к приводам, где требуется преобразовать возвратно-поступательное движение во вращательное в одном направлении. Вращающий момент во всех вариантах приводов создается с помощью клинового механизма, свернутого вокруг оси поворота. Входное звено (3) связано с подвижным элементом (2) двигателя. Осевая сила от двигателя направлена вдоль оси поворота. В первых двух вариантах хотя бы на одном звене клинового механизма есть выполненная по требуемому закону винтовая рабочая поверхность с углом подъема значительно больше угла трения. Входное звено, двигаясь по необходимому закону по направляющему элементу (5), заставляет поворачиваться выходное звено (11). Возникающий реактивный момент передается неподвижному звену (1) механизма. При холостом ходе двигателя выходное звено не поворачивается. В третьем и четвертом вариантах клиновой механизм содержит хотя бы одну условно замкнутую бесконечную винтовую рабочую поверхность правой и левой направленности с большими углами подъема. Оба хода двигателя рабочие. В пятом и шестом вариантах свернуто несколько клиновых механизмов, которые чередуют возможность передавать вращающий момент выходному звену. Изобретение позволяет исключить поворот выходного звена от воздействия внешних сил, уменьшить массу и габариты привода. 6 н.п. ф-лы, 22 ил.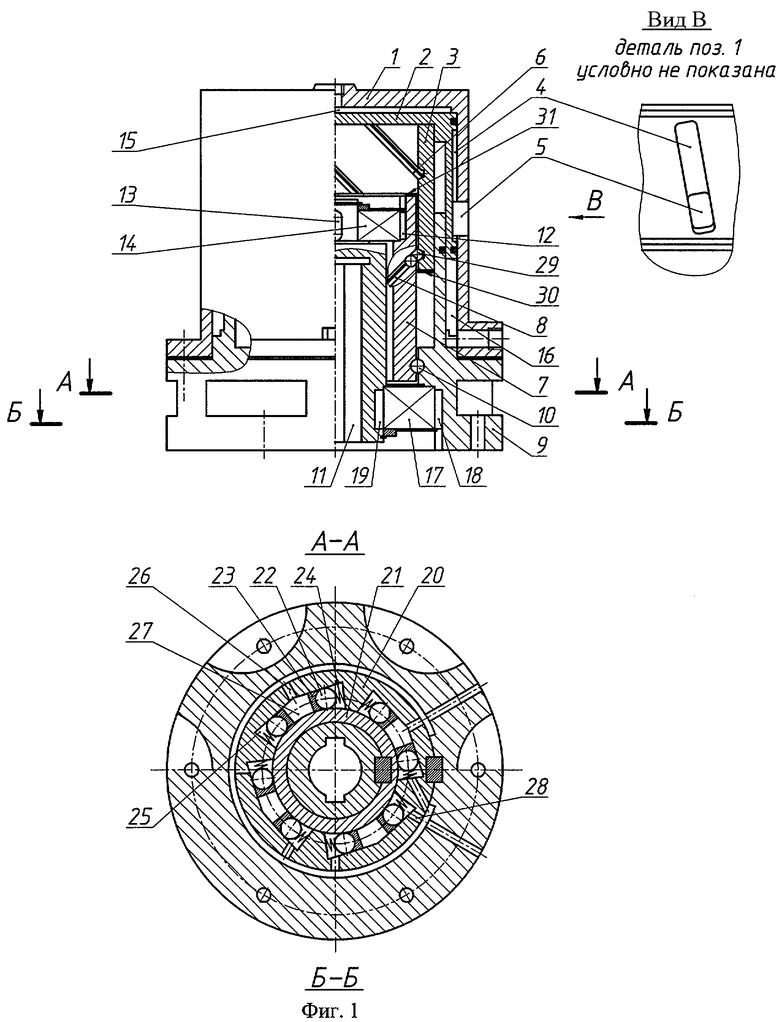
1. Поворотный привод, содержащий не менее чем один двигатель, силовой механизм, систему управления, отличающийся тем, что в качестве силового механизма содержит цилиндрический, свернутый вокруг оси поворота выходного звена клиновой механизм с выполненной по требуемому закону на хотя бы одном из звеньев не менее чем одной винтовой рабочей поверхностью с углом подъема значительно больше угла трения, по которой это звено контактирует с другим звеном непосредственно или через тела качения или скольжения, причем входное звено связано с подвижным элементом двигателя или само им является и может совершать многократные ходы по необходимому закону движения по не менее чем одному направляющему элементу, являющемуся телом скольжения или качения, имеющему возможность передавать реактивный момент неподвижному звену механизма при рабочем ходе подвижного элемента двигателя, во время которого имеют возможность замыкаться два звена - входное и выходное, или неподвижное и входное, или входное и промежуточное, или промежуточное и выходное, между которыми установлен не менее чем один механизм одностороннего действия, а между выходным и неподвижным звеном установлен не менее чем один нормально замкнутый управляемый тормоз, размыкающийся только на время поворота выходного звена.
2. Поворотный привод, содержащий не менее чем один двигатель, силовой механизм, систему управления, отличающийся тем, что в качестве силового механизма содержит цилиндрический, свернутый вокруг оси поворота выходного звена клиновой механизм с выполненной по требуемому закону на хотя бы одном из звеньев не менее чем одной винтовой рабочей поверхностью с углом подъема значительно больше угла трения, по которой это звено контактирует с другим звеном непосредственно или через тела качения или скольжения, причем входное звено связано с подвижным элементом двигателя или само им является и может совершать многократные ходы по необходимому закону движения по не менее чем одному направляющему элементу, являющемуся телом скольжения или качения, имеющему возможность передавать реактивный момент неподвижному звену механизма при рабочем ходе подвижного элемента двигателя, во время которого имеют возможность замыкаться два звена - входное и выходное, или неподвижное и входное, или входное и промежуточное, или промежуточное и выходное, между которыми установлен не менее чем один механизм одностороннего действия.
3. Поворотный привод, содержащий не менее чем один двигатель, силовой механизм, систему управления, отличающийся тем, что в качестве силового механизма содержит цилиндрический, свернутый вокруг оси поворота выходного звена клиновой механизм с выполненной по требуемому закону на хотя бы одном из звеньев не менее чем одной условно замкнутой бесконечной винтовой рабочей поверхностью правой и левой направленности с углом подъема значительно больше угла трения, по которой это звено контактирует с другим звеном непосредственно или через тела качения или скольжения, причем входное звено связано с подвижным элементом двигателя или само им является и может совершать многократные ходы по необходимому закону движения по не менее чем одному направляющему элементу, являющемуся телом скольжения или качения, имеющему возможность передавать реактивный момент неподвижному звену механизма при обоих направлениях хода подвижного элемента двигателя, а между выходным и неподвижным звеном установлен не менее чем один нормально замкнутый управляемый тормоз, размыкающийся только на время поворота выходного звена.
4. Поворотный привод, содержащий не менее чем один двигатель, силовой механизм, систему управления, отличающийся тем, что в качестве силового механизма содержит цилиндрический, свернутый вокруг оси поворота выходного звена клиновой механизм с выполненной по требуемому закону на хотя бы одном из звеньев не менее чем одной условно замкнутой бесконечной винтовой рабочей поверхностью правой и левой направленности с углом подъема значительно больше угла трения, по которой это звено контактирует с другим звеном непосредственно или через тела качения или скольжения, причем входное звено связано с подвижным элементом двигателя или само им является и может совершать многократные ходы по необходимому закону движения по не менее чем одному направляющему элементу, являющемуся телом скольжения или качения, имеющему возможность передавать реактивный момент неподвижному звену механизма при обоих направлениях хода подвижного элемента двигателя.
5. Поворотный привод, содержащий не менее чем один двигатель, силовой механизм, систему управления, отличающийся тем, что в качестве силового механизма содержит несколько цилиндрических, свернутых вокруг оси поворота выходного звена клиновых механизмов с общим выходным звеном, чередующих в зависимости от направления хода подвижного элемента двигателя возможность передавать вращающий момент выходному звену, у каждого из которых есть выполненная по требуемому закону на хотя бы одном из звеньев не менее чем одна винтовая рабочая поверхность с углом подъема значительно больше угла трения, по которой это звено контактирует с другим звеном непосредственно или через тела качения или скольжения, причем у каждого клинового механизма входное звено связано с подвижным элементом двигателя или само им является и может совершать многократные ходы по необходимому закону движения по не менее чем одному направляющему элементу, являющемуся телом скольжения или качения, имеющему возможность передавать реактивный момент неподвижному звену механизма при том ходе подвижного элемента двигателя, когда у одних клиновых механизмов имеют возможность замыкаться два звена - входное и выходное, или неподвижное и входное, или входное и промежуточное, или промежуточное и выходное, между которыми установлен не менее чем один механизм одностороннего действия, а у других клиновых механизмов имеют возможность размыкаться два звена - входное и выходное, или неподвижное и входное, или входное и промежуточное, или промежуточное и выходное, между которыми установлен не менее чем один механизм одностороннего действия, причем между выходным и неподвижным звеном установлен не менее чем один нормально замкнутый управляемый тормоз, размыкающийся только на время поворота выходного звена.
6. Поворотный привод, содержащий не менее чем один двигатель, силовой механизм, систему управления, отличающийся тем, что в качестве силового механизма содержит несколько цилиндрических, свернутых вокруг оси поворота выходного звена клиновых механизмов с общим выходным звеном, чередующих в зависимости от направления хода подвижного элемента двигателя возможность передавать вращающий момент выходному звену, у каждого из которых есть выполненная по требуемому закону на хотя бы одном из звеньев не менее чем одна винтовая рабочая поверхность с углом подъема значительно больше угла трения, по которой это звено контактирует с другим звеном непосредственно или через тела качения или скольжения, причем у каждого клинового механизма входное звено связано с подвижным элементом двигателя или само им является и может совершать многократные ходы по необходимому закону движения по не менее чем одному направляющему элементу, являющемуся телом скольжения или качения, имеющему возможность передавать реактивный момент неподвижному звену механизма при том ходе подвижного элемента двигателя, когда у одних клиновых механизмов имеют возможность замыкаться два звена - входное и выходное, или неподвижное и входное, или входное и промежуточное, или промежуточное и выходное, между которыми установлен не менее чем один механизм одностороннего действия, а у других клиновых механизмов имеют возможность размыкаться два звена - входное и выходное, или неподвижное и входное, или входное и промежуточное, или промежуточное и выходное, между которыми установлен не менее чем один механизм одностороннего действия.
| ПРИВОД | 2000 |
|
RU2265764C2 |
| Передача винт-гайка | 1988 |
|
SU1573274A2 |
| US 5549013 A, 27.08.1996 | |||
| US 4534235 A, 13.08.1985. | |||

