Изобретение относится к судостроению, в частности к судовым волновым движителям, использующим энергию волн для движения судна или привод от двигателя при отсутствии волн (штиль). Известно устройство, использующее бортовую качку для передвижения судна от поворотных крыльев, конструкция которых описана в изобретении РФ №2488518.
Недостатком устройства, использующего бортовую качку, является ограничение маневренности судна из-за выступающих крыльев, увеличивающих габаритную ширину корпуса.
Для повышения маневренности судна предлагается использование продольной качки, что позволит более эффективно использовать ширину корпуса как основную зону действия крыльев.
На фиг. 1 показано схематично главный вид корпуса судна с приводом от шарнирного четырехзвенного механизма к крыльям и перемещение сечения крыла относительно воды при обращенном движении (судно остановлено, а вода движется).
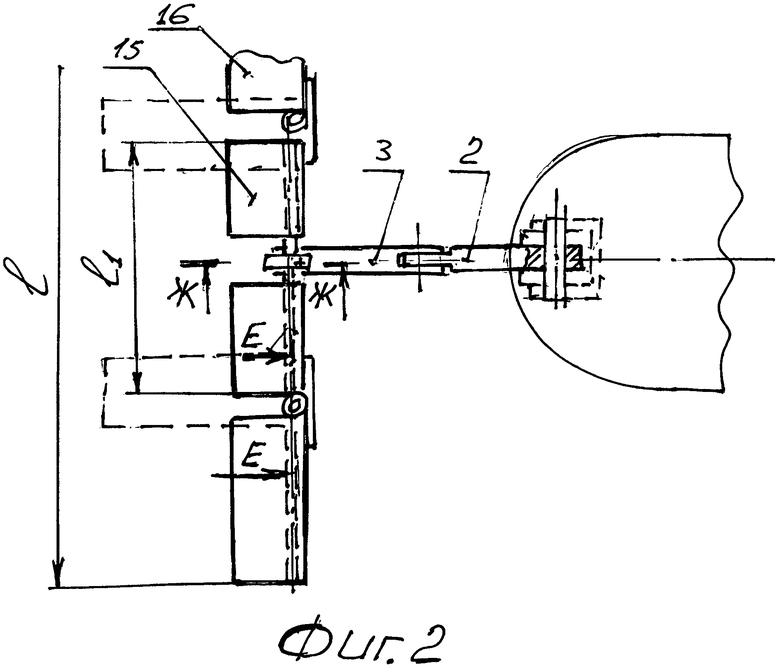
На фиг. 2 - вид сверху на судно с крыльями, состоящими из двух частей: основной и дополнительной, складной.
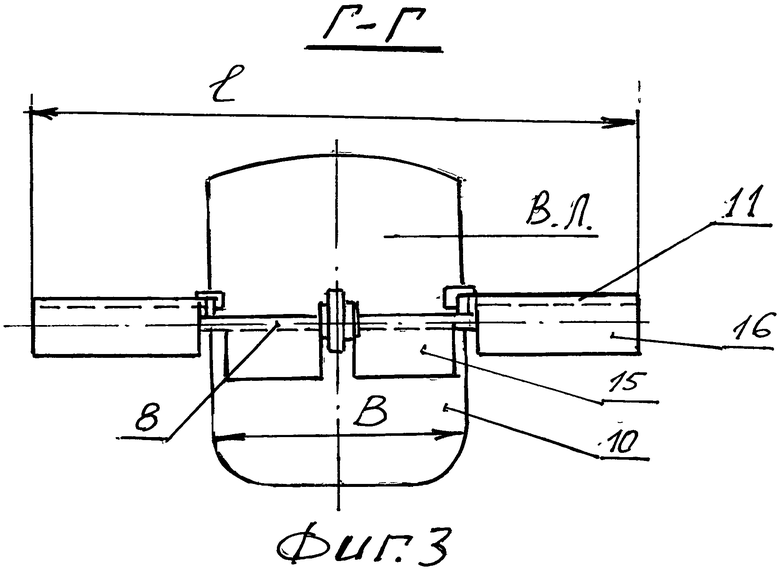
На фиг. 3 - разрез по Е-Е.
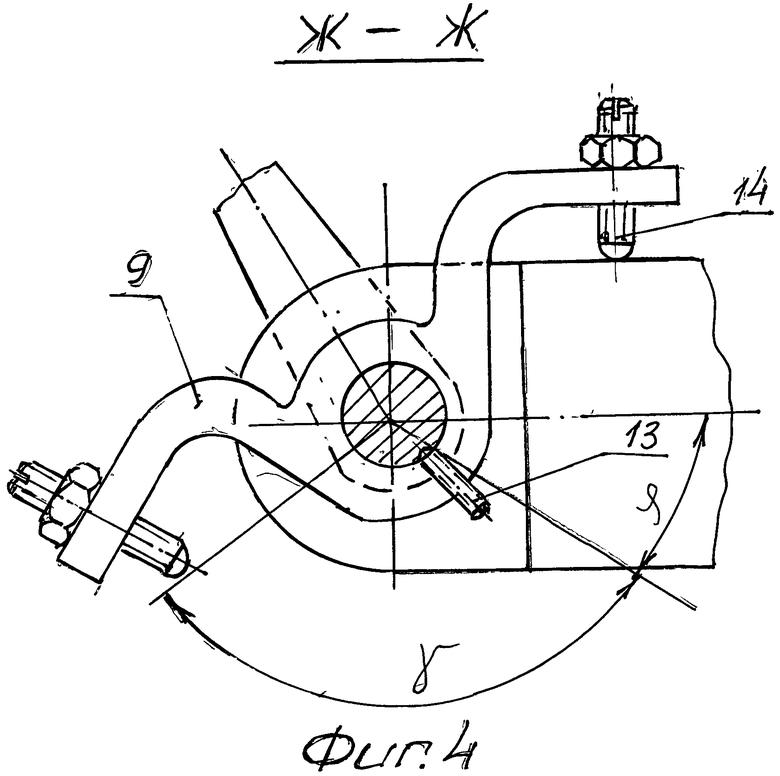
На фиг. 4 - разрез по Ж-Ж с обозначением угла поворота сечения крыла.
На фиг. 5 - шарнирное соединение для складывания крыльев.
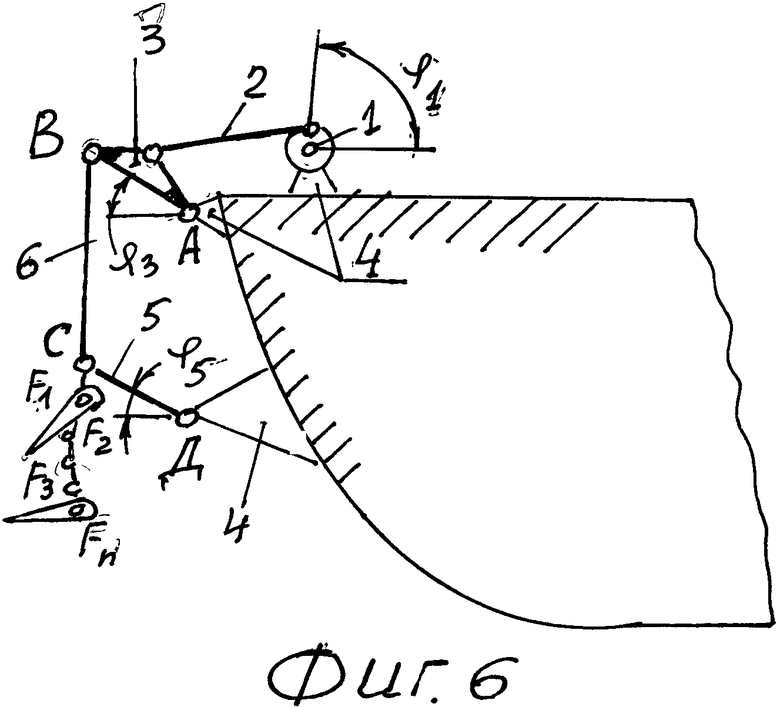
На фиг. 6 - кинематическая схема привода четырехзвенного механизма Чебышева П.Л. к крыльям.
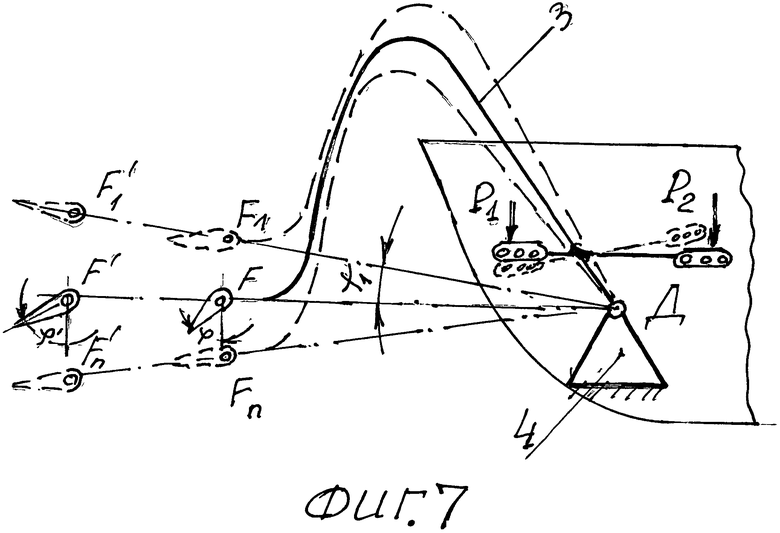
На фиг. 7- упрощенный двухзвенный механизм крыла.
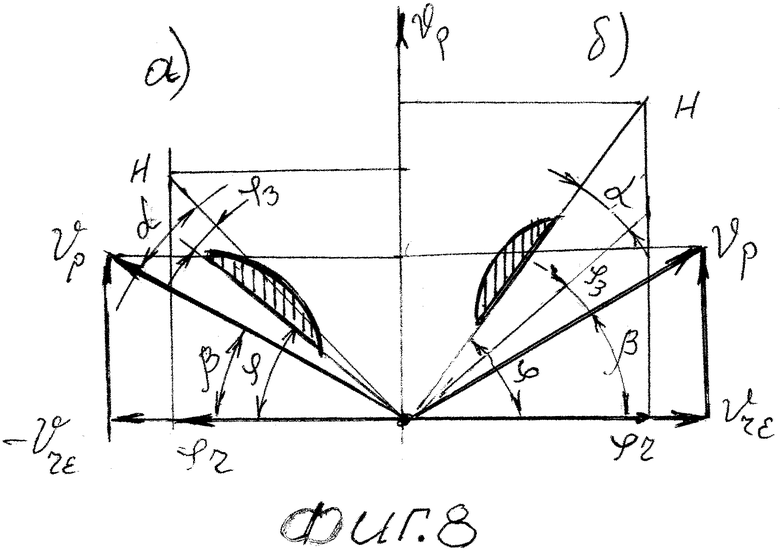
На фиг. 8а - обтекание сечения крыла при его движении вниз.
На фиг. 8б - обтекание сечения крыла при его движении вверх.
На чертежах обозначено: 1 - кривошипы; 2, 6 - шатуны; 3, 5 - коромыслы, 4 - стойки; 7 - упор; 8 - основной валик; 9 - скоба; 10 - корпус судна; 11 - дополный валик; 12 - серьга; 13 - стопорный винт; 14 - регулируемый упор; 15 - основное крыло; 16 - дополнительное крыло.
А, А1, В, С, Д - вращательные пары механизмов.
F1, F2, F3, F4…Fn - промежуточные положения сечений первого крыла.
F′1, F′2, F′3, F′4…F′n - промежуточные положения сечений второго крыла.
B - ширина корпуса судна.
ВЛ- прямая ватерлиния.
В1Л1 - наклонная ватерлиния.
в - ширина крыла.
l - длина основных крыльев.
l1- длина основных и дополнительных крыльев.
H - шаг волнового движителя в твердой среде.
h - поступь волнового движителя.
ψ - угол дифферента корпуса судна.
φ - шаговый угол.
φ1 - угол поворота кривошипа 1.
φ3 - угол качания коромысла 3.
φ5 - угол качания коромысла 5.
α - угол атаки крыла.
β - угол поступи.
r - радиус качания крыльев на волнении.
r1 - радиус качания крыльев равный длине коромысла при отсутствии волн.
τ0 - круговая частота продольной качки судна.
υp - скорость судна.
Судно с волновым движителем, действующим от продольной качки (дифферента), имеет корпус 10, к которому в кормовой части вдоль диаметральной плоскости установлено на шарнире коромысло, являющееся звеном шарнирного четырехзвенного механизма, обозначенного АВСД на фиг. 1. В точке Ε коромысла смонтированы поворотные валики 8, 12 с крыльями 15 и 16 (фиг. 2 и 3), поворачивающимися на угол γ=180-2φ, обеспечивающий наклон крыльям, равный шаговому углу φ.
При отсутствии волн коромысло получает возвратно-вращательное движение от вращающегося двигателем кривошипа, что позволяет крыльям создать силу упора, необходимую для движения судна.
Волновые движители на волнении позволяют использовать энергию волн для движения судна. В этом случае необходимо застопорить четырехзвенный механизм, чтобы коромысло было неподвижным и качалось вместе с судном как единое целое. При продольной качке корпус судна совершает гармонические колебания по косинусоиде:
ψ=ψ0cos(ω0t+φs), период которых равен τ0=2π/ω0, а угловая скорость
ε=ψ0φ0sin(ω0t+ψs), см. В.А. Лесюков «Теория и устройство судов внутреннего плавания», стр. 113, «Транспорт», 1982, где
ψ0 - начальный угол дифферента;
ψs - начальная фаза положения крыла.
Колебания корпуса приводят в движение крыло, имеющее наклон, равный шаговому углу φ=arctgH/2ψr. При продольной качке крыло участвует в двух движениях: перемещается вместе с судном со скоростью υp относительно воды и колеблется с периодом τ0. След траектории одного из сечений крыла F, перемещающегося по косинусоиде в зависимости от фазы ψs (от 0 до 2π), показан на фиг. 1. Соотношение между скоростью υp и периодом τ0 определяет поступь hp и представляет собой перемещение судна, соответствующее одному колебанию hp=υp τ=2πυp/ω0.
Сечение крыла F3, показанное на фиг. 1 и расположенное на расстоянии r от центра тяжести судна, перемещается в абсолютном движении со скоростью υ-∞, равной геометрической сумме скоростей судна υp и колебания υrε, и направление υ-∞ определяется углом поступи β, который находится из выражения:

Шаговый угол φ равен сумме углов: атаки α, поступи β и поворота коромысла φ3, т.е. φ=α+β±φ3.
При увеличении шагового угла φ3 происходит подъем крыла, которое достигает своего максимума (например, точки fn на фиг. 1), потом разворачивается и начинает снижение, проводит точку F6 с углом φ3=0 и снижается далее до своего минимума, до точки F4, снова разворачивается и начинает новый подъем и соответствующее увеличение угла φ3.
Отличие схемы обтекания крыльев волнового движителя, использующего продольную качку вместо бортовой, заключается в том, что направление движения центра тяжести судна происходит в горизонтальной плоскости, а колебания крыльев в вертикальной, и угол дифферента судна суммируется с шаговым углом либо положительно, либо отрицательно, т.к. при движении крыла вверх шаговый угол увеличивается, а вниз - уменьшается. Учитывая, что угол атаки равен α=φ-β±ψ (см. фиг. 8), получается, что при увеличенном дифференте угол атаки может получиться отрицательным, а в результате потеря движения судна.
Регулировка и контроль величины шагового угла выполняется при угле качания коромысла φ3=0 или диффиренте ψ=0.
В конструкции предусмотрено регулирование шагового угла φ (см. фиг. .4) регулировочным винтом 14. Учитывая, что углы φ и β постоянны, то увеличение шагового угла соответственно увеличит угол атаки. Увеличение угла атаки крыла уменьшает его качество, что приводит к дополнительным потерям. Поэтому следует ввести ограничение, чтобы угол атаки α был больше угла дифферента ψ0 (α>ψ0). При отсутствии волн (штиль) движение судна возможно от двигателя со снятым со стопора механизмом, создающим качание коромысла с крыльями, изображенное на фиг. 1. Амплитуда качания крыла при ограниченном угле качания коромысла зависит от длины коромысла 3. Чтобы получить от волнового движителя упор в штиль такой же, как и на волнении, необходимо удлинить коромысло до половины длины судна, т.е. r=r1, что выполнимо для малых судов, а для больших неконструктивно. Например, на фиг. 7 показана кинематическая схема упрощенного качающегося коромысла для лодки, в которой качание коромысла с крыльями выполняется ногами, нажимая на педали поочередно с силой P или P1.
Для увеличения силы упора волновых движителей можно использовать удлиненные складные крылья, длина L которых превышает ширину судна В (см. фиг. 2). При встречи с препятствием такие крылья складываются, а при выводе на простор они расправляются. Недостатком таких крыльев является уменьшение упора у крыльев в сложенном состоянии.
Для увеличения скорости движения судна используются двойные ряды крыльев, установленные последовательно на одном коромысле, которые отличаются величиной шагового угла: второй больше первого. Например, шаговый угол первого φ1=45°, второго φ2=60°. Остальные параметры крыльев: длина, ширина, толщина прежние. Количество крыльев может быть и большим, например тройным. Цель использования многорядных крыльев - уменьшение длины (L<B) для повышения маневренности. Поэтому многокрылые волновые движители перспективны.
Для больших судов возможно использование вместо шарнирного четырехзвенного механизма, показанного на фиг. 1, шарнирного четырехзвенника Чебышева П.Л. отличающегося тем, что одна из точек шатуна выполняет прямолинейное движение с допустимым отклонением. Кинематическая схема механизма Чебышева П.Л. показана на фиг. 6, точка F которого совершает приближенное прямолинейное движение. Эта точка является центром, к которому крепятся поворотные крылья. Использование механизма Чебышева П.Л. позволяет сделать устройство качания крыльев более компактным, но технологически более сложным из-за большего количества точных деталей (звеньев).
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ | 2012 |
|
RU2488518C1 |
| СУДНО НА ДИСКО-КРЫЛЬЯХ | 2008 |
|
RU2371347C1 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| СЕКЦИОННОЕ УПРУГОСГИБАЕМОЕ СУДНО, ЕГО КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ И СПОСОБ ДОСТАВКИ ГРУЗОВ МОРЕМ С ИСПОЛЬЗОВАНИЕМ ЭНЕРГИИ ВОЛН | 2007 |
|
RU2356783C2 |
| Волновой движитель подводных и полуподводных судов | 2021 |
|
RU2763918C1 |
| Волновой движитель многокорпусного судна | 2020 |
|
RU2736552C1 |
| РЕШЕТЧАТЫЙ СКУЛОВОЙ КИЛЬ ДЛЯ СУДОВ ВОДОИЗМЕЩАЮЩЕГО И ПЕРЕХОДНОГО РЕЖИМОВ ДВИЖЕНИЯ | 2015 |
|
RU2600487C1 |
| КАЧЕХОД И КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2392177C1 |
| АКТИВНЫЙ СТАБИЛИЗАТОР КИЛЕВОЙ И БОРТОВОЙ КАЧКИ КОРАБЛЯ - ШТОРМОВОЙ АВАРИЙНЫЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2384457C2 |
| СПОСОБ СОЗДАНИЯ ДВИЖУЩЕЙ СИЛЫ АППАРАТА В ТЕКУЧЕЙ СРЕДЕ И ДВИЖИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2172700C2 |

Изобретение относится к судостроению, а именно к судовым волновым движителям, использующим энергию волн для движения судна или привод от двигателя при отсутствии волн. Судовой волновой движитель состоит из поворотных валов с крыльями, которые обеспечивают крыльям наклон с шаговым углом и движение вниз-вверх. Поворотные валы с ограничительными упорами крепятся к качающемуся на шарнире коромыслу. Коромысло установлено в корме вдоль диаметральной плоскости судна, и совершает необходимое движение крыльев вниз-вверх от рычагов с педалями для малых судов или от шарнирного четырехзвенного механизма с двигателем для больших судов. Достигается повышение маневренности судна. 5 з.п. ф-лы, 8 ил.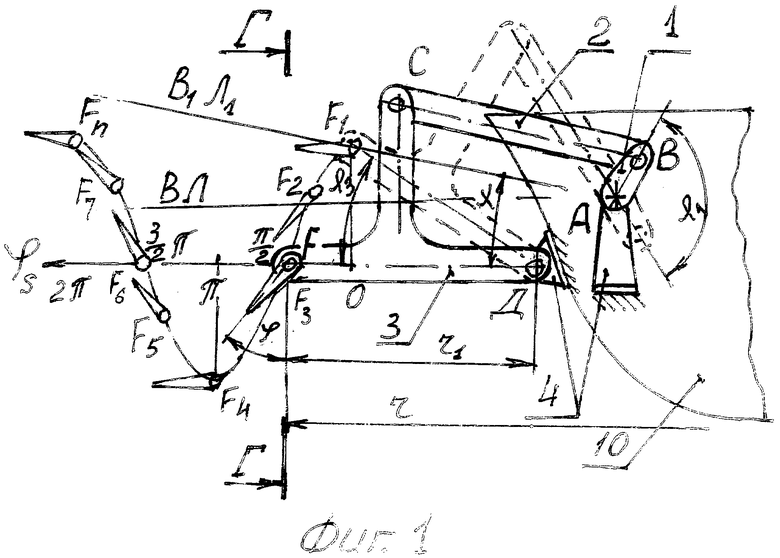
1. Судовой волновой движитель, способный обеспечивать передвижение судна как от двигателя, так и от продольной качки корпуса судна на волнении, состоящий из поворотных валов с крыльями, обеспечивающих им наклон под шаговым углом и движение вниз-вверх, отличающийся тем, что поворотные валы с ограничительными упорами крепятся к качающемуся на шарнире коромыслу, установленному в корме вдоль диаметральной плоскости судна и совершающему необходимое движение крыльев вниз-вверх от рычагов с педалями для малых судов (лодок) или от шарнирного четырехзвенного механизма с двигателем для больших и получающегося наклона крыльев под шаговым углом φ, равным сумме углов: атаки α, поступи β и поворота коромысла φ3, то есть φ=α+β±φ3, где знак + φ3 при движении крыла вверх, а знак - φ3 при движении вниз.
2. Волновой движитель по п.1, отличающийся тем, что при наличии волн рычажный механизм стопорится, и качание корпуса с коромыслом и крыльями происходит от продольной качки (дифферента) как единого целого, обеспечивающего движение судна с остановленным двигателем, и получившегося наклона крыльев под шаговым φ, равным сумме углов: атаки α, поступи β и дифферента Ψ, то есть φ=α+β±Ψ.
3. Волновой движитель по п.1, отличающийся тем, что при движении судна по волнам угол атаки крыльев α должен быть больше угла дифферента Ψ, т.е. α>Ψ, а при движении от двигателя угол α атаки больше угла качания коромысла φ3, т.е. α>φ3.
4. Волновой движитель по п.1, отличающийся тем, что поворотные валы крепятся к шатуну четырехзвенного механизма Чебышева, способного выполнять заданную траекторию крыла с малым углом поворота φ3.
5. Волновой движитель по п.1, отличающийся тем, что выступающие за ширину корпуса крылья для улучшения маневренности судна складываются, поворачиваясь в горизонтальной плоскости вокруг вертикальной оси, с ограничением углов поворота упорами.
6. Волновой движитель по п.1, отличающийся тем, что на одном коромысле закреплено несколько рядов крыльев с увеличивающимися шаговыми углами, длины которых менее ширины корпуса судна 1<В.
| СУДОВОЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ | 2012 |
|
RU2488518C1 |
| RU 2000998 C1, 15.10.1993 | |||
| WO 19991008139 A1, 13.06.1991 | |||

