Изобретение относится к области авиационной техники и может быть использовано для наземного и полетного контроля пилотажно-навигационного комплекса самолета, вертолета, беспилотного летательного аппарата. В аппаратурно безызбыточном коплексе летательного аппарата оно полностью проверяет работоспособность и точность основных его измерителей - инерциальной системы и доплеровского измерителя - без увеличения веса, габаритов, энергопотребления, стоимости и введения в него дополнительных датчиков контроля.
Известено устройство контроля пилотажно-навигационного комплекса, содержащего инерциальную систему и доплеровский измеритель скорости, по соответствию питающих токов и напряжений их номинальным значениям (Алтухов В.Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. М.: Машиностроение, 1991. С.42; Козарук В.В. Навигационно-пилотажный комплекс самолета ТУ-154 и его эксплуатация. М.: Машиностроение, 1993. С.53-54). При этом предполагается исправная работа контролируемого пилотажно-навигационного комплекса, если питающие устройство напряжения и токи в фазах не выходят за пределы поля допуска. Такой контроль реализуется в инерциальных навигационных системах с помощью пороговых элементов, реле, включенных в цепи питания проверяемого устройства. Наибольшее применение для гироприборов нашел сигнализатор напряжения питания (СНП-1). Аналогично контроль доплеровского измерителя скорости выполняет автомат защиты сети (АЗС) и автоматы защиты однофазной сети (АЗФ) [1, с.49]. Преимуществом такого контроля является простота реализации, надежность, малые вес, габариты и стоимость. К недостаткам следует отнести невозможность обнаружения неисправностей сигнальных, корректирующих и других слаботочных цепей, косвенный характер контроля. Достоверность и точность контроля здесь не определена, выходные сигналы инерциальной системы и доплеровского измерителя, которые поступают в пилотажно-навигационный комплекс, не проверяются.
Известно устройство для встроенного контроля доплеровского измерителя скорости (Авиационная радионавигация: Справочник. / А.А.Сосновский, И.А.Хаймович, Э.А.Лутин, И.Б.Максимов. Под ред. А.А.Сосновского. - М.: Транспорт, 1990. С.233), содержащее генератор низкочастотного тест-сигнала, имитирующего измеряемый полезный сигнал доплеровской частоты. Тест-сигнал модулирует по амплитуде просочившийся из передающего тракта высокочастотный сигнал антенны. В вычислителе доплеровского измерителя скорости этот сигнал обрабатывается подобно полезному сигналу скорости летательного аппарата и далее поступает на индикатор, который при исправности прибора должен показать летчику конкретное значение скорости и угла сноса. Устройство контроля работает лишь эпизодически, когда доплеровский измеритель скорости не может работать по своему принципу действия. Это так называемый режим „Память". Контроль ручной, эпизодический, в одной точке рабочего диапазона. Точность контроля по скорости - σW=5,56 м/с (2% W), по углу - 1,5 угл. град. [2, с.125], где W - скорость самолета. По опытным данным, за пять лет эксплуатации доплеровского измерителя скорости и угла сноса (ДИСС-013) достоверность контроля как вероятность обнаружения именно отказа в полете доплеровского измерителя, а не его контролирующего средства здесь не более 0,66. Информационная производительность контроля [3, с.13] как степень полноты контроля информации в пилотажно-навигационном комплексе здесь только 0,096 бит/с. Отдельные отказы при таком контроле доплеровского измерителя определяются только пилотом.
Известно устройство для полетного контроля доплеровского измерителя скорости и угла сноса (ДИСС-016) с четырехлучевой антенной системой (Флеров А.Г., Тимофеев В.Т. Доплеровские устройства и системы навигации. М.: Машиностроение, 1987. С.92), содержащее вычислитель соотношения выходных частот узкополосной фильтрации. Устройство использует известное соотношение, когда сумма разностей доплеровских частот антенн, кососимметрично расположенных относительно плоскости симметрии аппарата, отнесенная к сумме доплеровских частот антенн, расположенных по одну из сторон этой плоскости, является сравнительно небольшой величиной, определяемой погрешностью системы узкополосной фильтрации. Контроль осуществляется непрерывно. В горизонтальном полете проверяется точность доплеровского измерителя скорости. Однако точность такого контроля по скорости - 8,33 м/с (4% W), а по углу - 1,5 угл. град. [2, с.162] хуже предыдущего аналога. Точность контроля зависит от условий работы прибора, углов скольжения и кренов аппарата, несимметрии погрешностей каналов узкополосной фильтрации и естественной флюктуации доплеровских частот антенн в том числе и из-за свойств земной поверхности. Частотные сигналы, которые поступают в пилотажно-навигационный комплекс не проверяются, контроль носит косвенный характер. Введение контролирующих средств в сам проверяемый доплеровский измеритель усложняет его конструкцию, а значит снижает его надежность так, что опытное значение достоверности контроля здесь не более 0,62. Информационная производительность контроля мала - 0,096 бит/с.
Известно устройство контроля двух одинаковых гироскопических датчиков тангажа и крена пилотажно-навигационного комплекса (Бондарчук И.Е., Харин В.И. Авиационное и радиоэлектронное оборудование самолета ЯК-40. М.: Транспорт, 1982. С.205), которое содержит два идентичных канала сравнения одноименных сигналов тангажа и крена основного - проверяемого и проверяющего гироскопических датчиков. Блок сравнения и предельного крена (БСПК) осуществляет сравнение выходных электрических сигналов двух сельсинов-датчиков гироскопических вертикалей. При отказе одной из них показания приборов становятся неодинаковыми. Происходит рассогласование между сигналами сельсинов-датчиков и сельсинов-приемников. Оно поступает на вход релейного усилителя, выполняющего функцию компаратора, сообщающего об отказе приборов. Точность контроля здесь 7±2 угл. град. Современная реализация такого контроля сравнением в бортовом вычислителе, например, типа ЦВМ-80 обеспечивает достоверность определения отказа дублированной инерциальной системы типа инерциальная курсовертикаль ИКВ-802 на уровне 0,86. Устройство сравнительно точно контролирует приборы на земле и в полете, имеет высокую надежность и, как следствие, повышенную достоверность обнаружнения отказа. Однако для его реализации необходимо дублирование всех проверяемых приборов комплекса, что увеличивает в два раза его вес, габариты, стоимость, энергопотребление. Если учесть наибольшую стоимость именно проверяемых доплеровского измерителя и инерциальной системы, то становится особенно очевидной обременительность такого решения. Информационная производительность контроля тангажа и крена здесь 0,424 бит/с.
Известно устройство комплексного полетного контроля трех инерциальных навигационных систем (или трех доплеровских измерителей скорости), построенное по мажоритарному методу контроля (Алтухов В.Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. М.: Машиностроение, 1991. С.38, 122; Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. С.194, 295). Оно содержит кворум-элементы и сигнализаторы напряжений, которые проводят непрерывное сравнение выходных сигналов каждого из трех проверяемых приборов с их осредненным сигналом, полученным на выходе кворум-элемента. При отказе одного из приборов его выходной сигнал будет существенно отличаться от выходного сигнала кворум-элемента. Это позволяет соответствующему сигнализатору напряжений, выполняющему функции компаратора, идентифицировать отказ. Устройства контроля, построенные по мажоритарному методу, находят широкое применение для полетного контроля приборов ЛА. Они обладают высокой точностью 7±2 угл. град., обеспечивают отказоустойчивость получения приборной информации об ориентации и скорости полета летчиком при единичных отказах приборов. Достоверность контроля здесь 0,9. Информационная производительность одного мажорируемого при контроле параметра здесь 0,242 бит/с. Однако трехкратное резервирование сравнительно недорогого и малонадежного приборного оборудования пилотажно-навигационного комплекса целесообразно лишь на тяжелых пассажирских самолетах, где безопасность имеет первостепенное значение даже при значительном ухудшении веса, габаритов, стоимости, энергопотребления оборудования. Однако и там, из-за очень высокой стоимости доплеровского измерителя и инерциальной системы их резервирование, выше ранее указанного дублирования, практически не встречается.
Наиболее близким из числа известных технических решений является „Устройство для контроля построителя вертикали и датчиков скоростей летательного аппарата" (Пат. 2187141 РФ, МКИ G05B 23/00, G05D 1/04. // Б.И. 2002, №22), которое содержит построитель вертикали, с выходами тангажа и крена, датчик вертикальной скорости, датчик проекции вектора скорости на продольную ось связанной системы координат, датчик проекции вектора скорости на нормальную ось связанной системы координат, датчик проекции вектора скорости на поперечную ось связанной системы координат, пять умножителей, четыре функциональных преобразователя и сумматор на четыре входа так, что вход первого умножителя соединен с выходом первого функционального преобразователя, подключенного к выходу крена построителя вертикали, второй вход - с выходом второго функционального преобразователя, подключенного к выходу тангажа построителя вертикали, вход второго умножителя соединен с выходом датчика проекции вектора скорости на продольную ось связанной системы координат, второй вход - с третьим функциональным преобразователем, подключенным к выходу тангажа построителя вертикали, а выход - с первым входом сумматора на четыре входа, второй вычитающий вход которого соединен с выходом датчика вертикальной скорости, вход третьего умножителя соединен с выходом датчика проекции вектора скорости на поперечную ось связанной системы координат, второй вход - с выходом первого умножителя, а выход - с третьим вычитающим входом сумматора на четыре входа, вход четвертого умножителя, через четвертый функциональный преобразователь, соединен с выходом крена построителя вертикали, второй вход - с выходом второго функционального преобразователя, а выход - с входом пятого умножителя, второй вход которого соединен с выходом датчика проекции вектора скорости на нормальную ось связанной системы координат, а выход - с четвертым входом сумматора на четыре входа, выход которого соединен с компаратором, являющимся выходом устройства. Для практической реализации такого контроля на указанных ранее ИКВ-802, ДИСС-016 и ЦВМ-80 достоверность контроля получается равной 0.86, информационная производительность - 0,625 бит/с.
Недостатком известного устройства-прототипа является невозможность полного контроля инерциальной системы и доплеровского измерителя, входящих в пилотажно-навигационный комплекс самолета, по всем выходным сигналам с высокой достоверностью, наименьшим весом, габаритами, стоимостью и энергопотреблением комплекса без введения в него аппаратной избыточности. Причиной, препятствующей получению указанного ниже технического результата при использовании известного устройства-прототипа, является использование для контроля только датчика вертикальной скорости и построителя вертикали, измеряющих только часть выходных сигналов инерциальной системы. Это сделало невозможным контроль пилотажно-навигационного комплекса по сигналам горизонтальных проекций скорости, гироскопического курса инерциальной системы и сигналам проекции скорости и угла скольжения доплеровского измерителя.
Основной задачей, на решение которой направлен заявляемый объект-устройство, является повышение безопасности полета, при непрерывном получении истинной полетной информации пилотом, посредством полного автоматического наземного и полетного контроля пилотажно-навигационного комплекса самолета, включающего инерциальную систему и доплеровский измеритель, без введения в него аппаратурной избыточности и ручных манипуляций с проверяемыми приборами.
Техническим результатом является: повышение полноты контроля, выраженное информационной производительностью предлагаемого устройства, надежность обнаружения возможного отказа именно пилотажно-навигационного комплекса, содержащего инерциальную систему и доплеровский измеритель, а не контролирующего средства, выраженное достоверностью контроля, точностью контроля выше чем у известных средств при минимально возможном весе, габаритах, энергопотреблении и стоимости бортовой аппаратуры самолета.
Указанный технический результат достигается тем, что в систему для контроля пилотажно-навигационного комплекса, содержащую инерциальную систему и доплеровский измеритель, первый и второй функциональные преобразователи, входы которых соединены с выходом тангажа инерциальной системы, третий и четвертый функциональные преобразователи, входы которых соединены с выходом крена инерциальной системы, сумматор на четыре входа и компаратор, введены первый и второй квадраторы, сумматор, делитель, первый, второй, третий преобразователи координат, пятый, шестой, седьмой, восьмой функциональные преобразователи, второй, третий сумматоры на четыре входа, первая, вторая, третья, четвертая, пятая схемы вычитания, второй, третий, четвертый, пятый компараторы, выходы которых, как и выход первого компаратора, соединены с входами схемы ИЛИ, причем вход первого квадратора, как и первый вход первого преобразователя координат, соединены с выходом северной составляющей скорости инерциальной системы, второй и третий входы первого преобразователя координат соединены соответственно с выходами пятого и шестого функциональных преобразователей, входы которых соединены с выходом гироскопического курса инерциальной системы, четвертый вход первого преобразователя координат - с выходом вертикальной составляющей скорости инерциальной системы, пятый вход первого преобразователя координат, как и вход второго квадратора - с выходом западной составляющей скорости инерциальной системы, выходы первого и второго квадраторов соединены с входами первого сумматора, первый и второй выходы первого преобразователя координат соединены соответственно с первым и вторым входами делителя, выход которого соединен с входом последовательно соединенных седьмого функционального преобразователя, первой схемы вычитания и первого компаратора, третий выход первого преобразователя координат соединен с первым входом второго преобразователя координат, второй и третий входы которого соединены соответственно с выходами первого и второго функциональных преобразователей, четвертый и пятый входы второго преобразователя координат - со вторым и первым выходами первого преобразователя координат, первый вход третьего преобразователя координат соединен с третьим выходом второго преобразователя координат, второй и третий входы третьего преобразователя координат соединены соответственно с выходами третьего и четвертого функциональных преобразователей, а четвертый и пятый входы - с первым и вторым выходами второго преобразователя координат, выход первого сумматора через восьмой функциональный преобразователь соединен с входом второй схемы вычитания, второй вход которой соединен с выходом горизонтальной проекции скорости доплеровского измерителя, а выход - с входом второго компаратора, первый выход третьего преобразователя координат соединен с последовательно соединенными третьей схемой вычитания, третьим компаратором, второй выход третьего преобразователя координат соединен с последовательно соединенными четвертой схемой вычитания, четвертым компаратором, третий выход третьего преобразователя координат соединен с последовательно соединенными пятой схемой вычитания, пятым компаратором, второй вход первой схемы вычитания соединен с выходом угла скольжения доплеровского измерителя, второй вход третьей схемы вычитания соединен с выходом первого сумматора на четыре входа, первый вычитающий вход которого соединен с выходом первой частоты доплеровского измерителя, второй суммирующий вход - с выходом второй частоты доплеровского измерителя, третий суммирующий вход - с выходом третьей частоты доплеровского измерителя, четвертый вычитающий вход - с выходом четвертой частоты доплеровского измерителя, второй вход четвертой схемы вычитания соединен с выходом второго сумматора на четыре входа, первый суммирующий вход которого соединен с выходом первой частоты доплеровского измерителя, второй вычитающий вход - с выходом второй частоты доплеровского измерителя, третий суммирующий вход - с выходом третьей частоты доплеровского измерителя, четвертый вычитающий вход - с выходом четвертой частоты доплеровского измерителя, второй вход пятой схемы вычитания соединен с выходом третьего сумматора на четыре входа, первый суммирующий вход которого соединен с выходом первой частоты доплеровского измерителя, второй вход - с выходом второй частоты доплеровского измерителя, третий вход - с выходом третьей частоты доплеровского измерителя, четвертый вход - с выходом четвертой частоты доплеровского измерителя, выход схемы ИЛИ является выходом системы.
Указанный технический результат в частных случаях достигается тем, что в системе для контроля пилотажно-навигационного комплекса по п.1 преобразователь координат содержит последовательно соединенные первый умножитель, первый вход которого соединен с первым входом преобразователя координат, второй вход - со вторым входом преобразователя координат, и второй сумматор, второй вход которого соединен с выходом второго умножителя, а выход - с первым выходом преобразователя координат, последовательно соединенные третий умножитель, первый вход которого соединен с первым входом преобразователя координат, второй вход - с третьим входом преобразователя координат, и шестая схема вычитания, суммирующий вход которой соединен с выходом третьего умножителя, вычитающий вход - с выходом четвертого умножителя, а выход - со вторым выходом преобразователя координат, четвертый вход преобразователя координат соединен с его третьим выходом, пятый вход - с первыми входами второго и четвертого умножителей, вторые входы которых соединены соответственно с третьим и вторым входами преобразователя координат.
Совокупность существенных признаков изобретения обеспечивает получение технического результата, достигаемого при осуществлении изобретения, - системы для контроля пилотажно-навигационного комплекса, содержащего инерциальную систему и доплеровский измеритель. При этом сущность изобретения заключается в формировании сигналов оценок, пропорциональных углу скольжения, горизонтальной проекции скорости, проекций скорости на оси связанной системы координат, по выходным сигналам инерциальной системы и сравнения их с выходными сигналами аналоговых выходов доплеровского измерителя - углом скольжения, горизонтальной проекцией скорости самолета и точными частотными сигналами с выходов доплеровского измерителя. Последние функционально связаны с проекциями скорости на оси связанной системы координат, по которым в пилотажно-навигационном комплексе формируются точные навигационные сигналы, пропорциональные проекциям скорости самолета. При появлении неисправности или неточности работы инерциальной системы или доплеровского измерителя равенство оценок сигналов и их значений нарушается и система фиксирует отказ пилотажно-навигационного комплекса.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам заявленной системы для контроля пилотажно-навигационного комплекса, отсутствуют, следовательно, заявленное изобретение соответствует условию „новизна".
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на:
- дополнении известного устройства-аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства-аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства-аналога с одновременным исключением, обусловленной ее наличием функции, и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства-аналога или его части из известного материала для достижения технического результата обусловленного известными свойствами материала;
- создании устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставлении таких признаков во взаимосвязи либо изменение вида взаимосвязи, если известен факт влияния каждого из них на технический результат и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует „изобретательскому уровню".
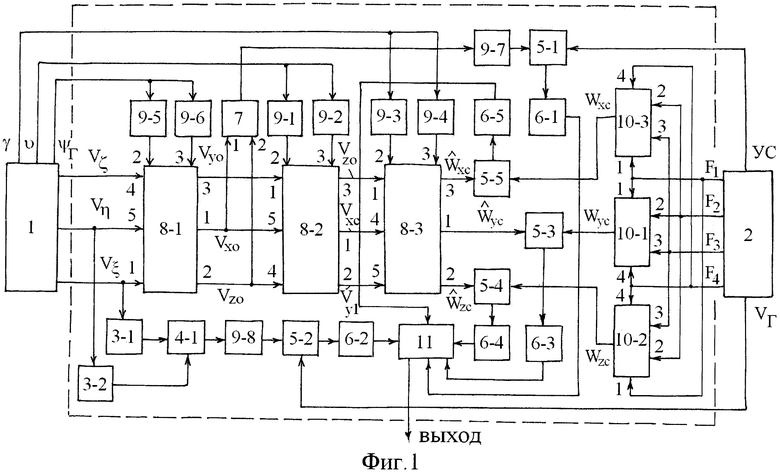
Сущность изобретения поясняется чертежами, где на фиг.1 изображена структурная схема системы для контроля пилотажно-навигационного коплекса и приняты следующие обозначения:
1 - инерциальная система;
2 - доплеровский измеритель;
3-1, 3-2 - первый, второй квадраторы;
4-1 - первый сумматор;
5-1, 5-2, 5-3, 5-4, 5-5 - первая, вторая, третья, четвертая, пятая схемы вычитания;
6-1, 6-2, 6-3, 6-4, 6-5 - первый, второй, третий, четвертый, пятый компараторы;
7 - делитель;
8-1, 8-2, 8-3 - первый, второй, третий преобразователи координат;
9-1, 9-2, 9-3, 9-4, 9-5, 9-6, 9-7, 9-8 - первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой функциональные преобразователи;
10-1, 10-2, 10-3 - первый, второй, третий сумматоры на четыре входа;
11 - схема ИЛИ;
ψ, υ, γ - углы рыскания, тангажа, крена, измеряемые инерциальной системой;
ψГ=K-ψ - гироскопический курс;
K - курс ортодромии;
Vξ, Vη, Vζ - проекции вектора скорости полета самолета на оси географически ориентированной, горизонтальной системы координат, измеряемые инерциальной системой 1; Vξ - северная составляющая скорости; Vη - западная составляющая скорости; Vζ - вертикальная составляющая скорости;
VX0, VY0, VZ0 - проекции вектора скорости полета самолета на оси ортодромической системы координат;
VXC, VY1, VZ0 - проекции вектора скорости полета самолета на оси системы координат XC, Y1, Z0 после поворота на угол тангажа υ;
 ,
,  ,
,  - оценки проекции вектора скорости полета самолета на оси связанной системы координат XC, YC, ZC, после поворота на угол крена γ;
- оценки проекции вектора скорости полета самолета на оси связанной системы координат XC, YC, ZC, после поворота на угол крена γ;
WXC, WYC, WZC - проекции вектора скорости полета самолета на оси связанной системы координат XC, YC, ZC, полученные по частотам доплеровского измерителя 2;
F1, F2, F3, F4 - первая, вторая, третья, четвертая частоты доплеровского измерителя 2.
VГ - горизонтальная проекция вектора скорости полета самолета относительно Земли, измеряемая доплеровским измерителем 2;
УС - угол скольжения или угол между горизонтальной проекцией продольной оси самолета OXC и горизонтальной проекцией VГ вектора скорости, измеряемый доплеровским измерителем 2.
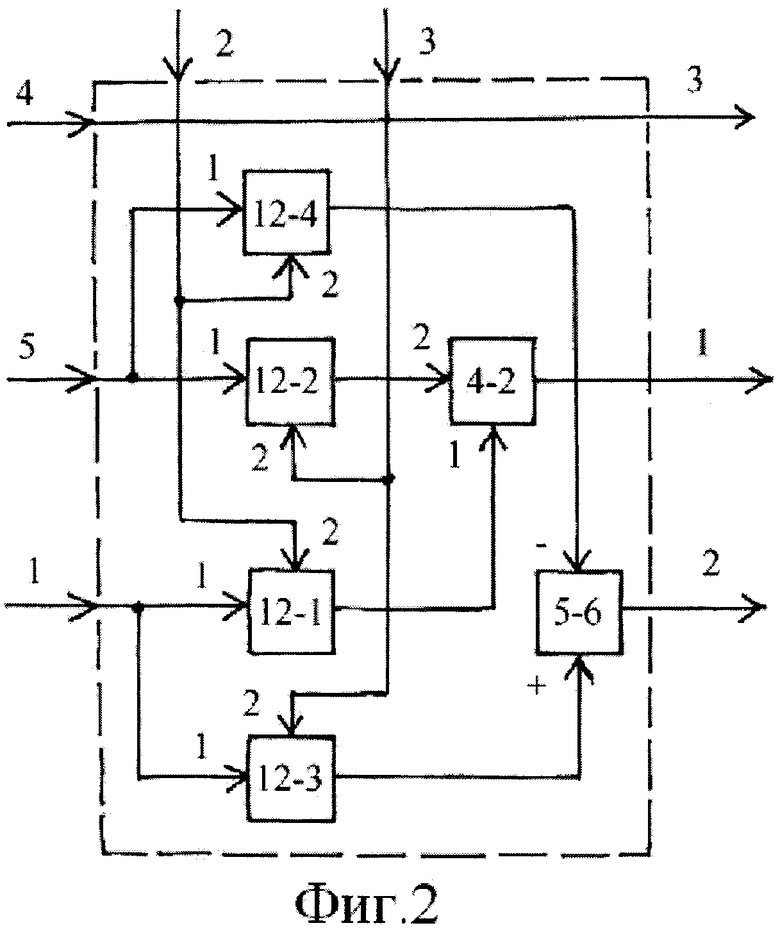
На фиг.2 приведена структурная схема преобразователей 8-1, 8-2, 8-3 координат, где приняты следующие обозначения:
4-2 - второй сумматор;
5-6 - шестая схема вычитания;
12-1, 12-2, 12-3, 12-4 - первый, второй, третий, четвертый умножители.
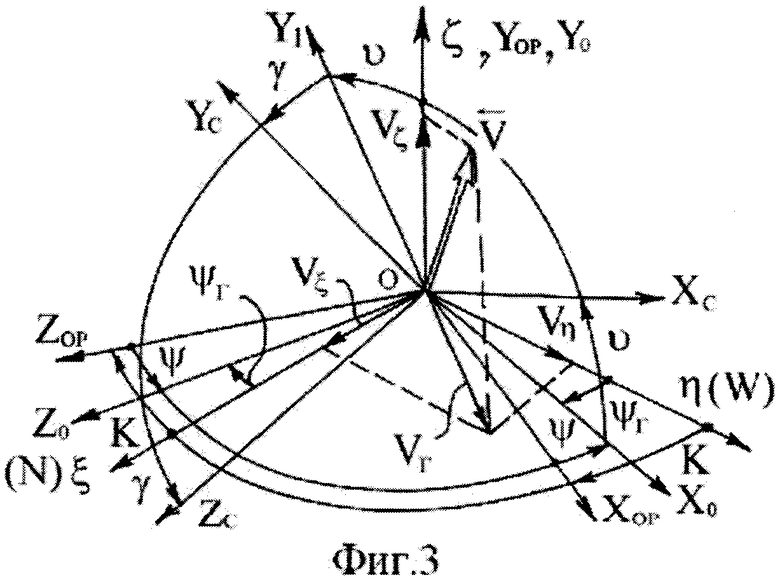
На фиг.3 изображено взаимное положение систем координат. При этом приняты следующие обозначения:
Oξηζ - географически ориентированная, горизонтальная система координат, реализуемая инерциальной системой 1;
Оξ(N) - ось географически ориентированной, горизонтальной системы координат, ориентированная в северном (N) направлении;
Oη{W) - ось географически ориентированной, горизонтальной системы координат, ориентированная в западном (W) направлении;
Oζ - ось географически ориентированной, горизонтальной системы координат, ориентированная по вертикали места;
OXCYCZC - связанная система координат самолета, по осям которой измеряются скорости доплеровским измерителем 2;
OXC - продольная ось связанной системы координат, ориентированная по строительной оси самолета в плоскости его симметрии;
OYC - нормальная ось связанной системы координат, ориентированная перпендикулярно OXC в плоскости симметрии самолета;
OZC - поперечная ось связанной системы координат, ориентированная перпендикулярно плоскости симметрии самолета в сторону правого крыла;
OXopYopZop - ортодромическая система координат, повернутая относительно географически ориентированной, горизонтальной системы координат Oξηζ на угол K курса ортодромии;
 - вектор скорости полета самолета относительно Земли.
- вектор скорости полета самолета относительно Земли.
При этом оценка проекции VГ вектора скорости на горизонтальную плоскость ξOη, измеряемая доплеровским измерителем 2, получается сразу по выходным сигналам Vξ северной и Vη западной составляющих скорости, измеренных инерциальной системой 1. Для этого сигналы, пропорциональные составляющим скорости, возводятся в квадрат, суммируются и, пройдя функциональный преобразователь, дают оценку проекции  так, что
так, что

Последующее сравнение этой оценки с выходным сигналом доплеровского измерителя 2 позволяет оценить правильность работы пилотажно-навигационного комплекса по сигналам Vξ, Vη, VГ. Для получения оценки угла скольжения  , измеряемого доплеровским измерителем 2, необходимо определить проекции вектора скорости на горизонтальные оси X0, Z0. Поэтому сигналы, пропорциональные проекциям скорости на оси Oξηζ, измеряемые инерциальной системой 1, подаются на преобразователь координат 8-1, где вычисляются проекции:
, измеряемого доплеровским измерителем 2, необходимо определить проекции вектора скорости на горизонтальные оси X0, Z0. Поэтому сигналы, пропорциональные проекциям скорости на оси Oξηζ, измеряемые инерциальной системой 1, подаются на преобразователь координат 8-1, где вычисляются проекции:

где  - матрица поворота на угол ψГ гироскопического курса. Ее реализация, как и реализация матриц поворота на углы тангажа Аϑ и крена Аγ, возможна по схеме, показанной на фиг.2, тогда
- матрица поворота на угол ψГ гироскопического курса. Ее реализация, как и реализация матриц поворота на углы тангажа Аϑ и крена Аγ, возможна по схеме, показанной на фиг.2, тогда
 ;
;  ;
; 
где sinϑ, cosϑ, sinγ, cosγ,  ,
,  - тригонометрические функции углов тангажа ϑ, крена γ, гироскопического курса ψГ, полученные на вторых и третьих входах преобразователей координат 8-2, 8-3, 8-1 с выходов функциональных преобразователей 9-1, 9-2, 9-3, 9-4, 9-5, 9-6. Тогда определение, с учетом (2), оценки угла скольжения
- тригонометрические функции углов тангажа ϑ, крена γ, гироскопического курса ψГ, полученные на вторых и третьих входах преобразователей координат 8-2, 8-3, 8-1 с выходов функциональных преобразователей 9-1, 9-2, 9-3, 9-4, 9-5, 9-6. Тогда определение, с учетом (2), оценки угла скольжения  по преобразованным в преобразователе координат 8-1 сигналам инерциальной системы 1 будет
по преобразованным в преобразователе координат 8-1 сигналам инерциальной системы 1 будет 
Операция деления скоростей реализуется в делителе 7, а функция arctg в функциональном преобразователе 9-7 так, что на схему вычитания 5-1 поступают оценка  угла скольжения и его измеренное значение УС с доплеровского измерителя 2. Схемы вычитания 5-1 и 5-2 совместно с компараторами 6-1, 6-2 проводят оценку исправности инерциальной системы 1 по сигналам тангажа, крена, гироскопического курса, северной, западной составляющих скорости и аналоговым выходам горизонтальной проекции скорости, углу скольжения доплеровского измерителя 2. Для оценки работоспособности и точности четырехлучевого доплеровского измерителя 2 по его первому, второму, третьему, четвертому частотным выходам, сигналы F1, F2, F3, F4 подаются на входы первого, второго, третьего сумматоров на четыре входа, где в соответствии с известными зависимостями [2, с.38, (2.9)] формируются сигналы, пропорциональные проекциям WXC, WYC, WZC вектора скорости полета самолета на оси связанной системы координат XC, YC, ZC, полученные по выражениям:
угла скольжения и его измеренное значение УС с доплеровского измерителя 2. Схемы вычитания 5-1 и 5-2 совместно с компараторами 6-1, 6-2 проводят оценку исправности инерциальной системы 1 по сигналам тангажа, крена, гироскопического курса, северной, западной составляющих скорости и аналоговым выходам горизонтальной проекции скорости, углу скольжения доплеровского измерителя 2. Для оценки работоспособности и точности четырехлучевого доплеровского измерителя 2 по его первому, второму, третьему, четвертому частотным выходам, сигналы F1, F2, F3, F4 подаются на входы первого, второго, третьего сумматоров на четыре входа, где в соответствии с известными зависимостями [2, с.38, (2.9)] формируются сигналы, пропорциональные проекциям WXC, WYC, WZC вектора скорости полета самолета на оси связанной системы координат XC, YC, ZC, полученные по выражениям:



где Г0, В0 - установочные углы лучей антенны доплеровского измерителя; λ - длина радиоволны. Для трехлучевого доплеровского измерителя, в соответствии с известными зависимостями [2, с.38, (2.10)], структура и знаки сигналов на фиг.1 не меняются, так как выражения для WXC, WYC, WZC проекций вектора скорости полета самолета имеют вид:



Оценки  ,
,  ,
,  проекций вектора скорости по сигналам инерциальной системы получаются в соответствии с выражениями вида:
проекций вектора скорости по сигналам инерциальной системы получаются в соответствии с выражениями вида:


приведения проекций скорости самолета из географически ориентированной, горизонтальной системы координат в систему координат, связанную с измерительными осями доплеровского измерителя. Это преобразование, выполняется преобразователями координат 8-1, 8-2, 8-3 и функциональными преобразователями 9-1, 9-2, 9-3, 9-4, 9-5, 9-6 по всем выходным сигналам инерциальной системы 1: Vξ - северной составляющей скорости, Vη - западной составляющей скорости, Vζ - вертикальной составляющей скорости, ϑ - тангажу, γ - крену, ψГ - гироскопическому курсу. В общем виде это можно записать следующим соотношением

Выходные сигналы преобразователя координат 8-3, как и выходные сигналы сумматоров 10-1, 10-2, 10-3 на четыре входа, поступают на входы схем вычитания 5-3, 5-4, 5-5, где производится оценка равенства одноименных сигналов, полученных с инерциальной системы и доплеровского измерителя. В том случае, если разность сигналов превышает допустимое значение, например, из-за отказа инерциальной системы, доплеровского измерителя, снижения их точности, компараторы 6-3, 6-4, 6-5 выдают сигнал/сигналы отказа на логическую схему ИЛИ, являющуюся выходом устройства.
Указанный технический результат в частных случаях достигается тем, что в устройстве для контроля пилотажно-навигационного комплекса по п.1, преобразователь координат 8-1, 8-2, 8-3, показанный на фиг.2, реализует следующие соотношения между его входными: Х1, Х2, Х3, Х4, Х5 и выходными: Y1, Y2, Y3 сигналами



Если учесть, что на второй и третий входы преобразователей координат 8-1, 8-2, 8-3 всегда поступает сигнал, пропорциональный тригонометрической функции соответственно sin и cos либо угла  гироскопического курса, либо тангажа ϑ, либо крена γ с функциональных преобразователей 9-5, 9-6 или 9-1, 9-2, или 9-3, 9-4, то, учитывая (2), (3), (11), (12), уравнения в преобразователе координат 8-1 будут:
гироскопического курса, либо тангажа ϑ, либо крена γ с функциональных преобразователей 9-5, 9-6 или 9-1, 9-2, или 9-3, 9-4, то, учитывая (2), (3), (11), (12), уравнения в преобразователе координат 8-1 будут:



в преобразователе координат 8-2 будут:



в преобразователе координат 8-3 будут:



Таким образом получены оценки проекций вектора скорости на оси связанной системы координат по выходным сигналам инерциальной системы. При появлении неисправности или неточности работы инерциальной системы 1 или доплеровского измерителя 2 равенство оценок сигналов и их значений нарушается и система фиксирует отказ пилотажно-навигационного комплекса.
Общий алгоритм работы системы контроля пилотажно-навигационного комплекса имеет следующий вид:
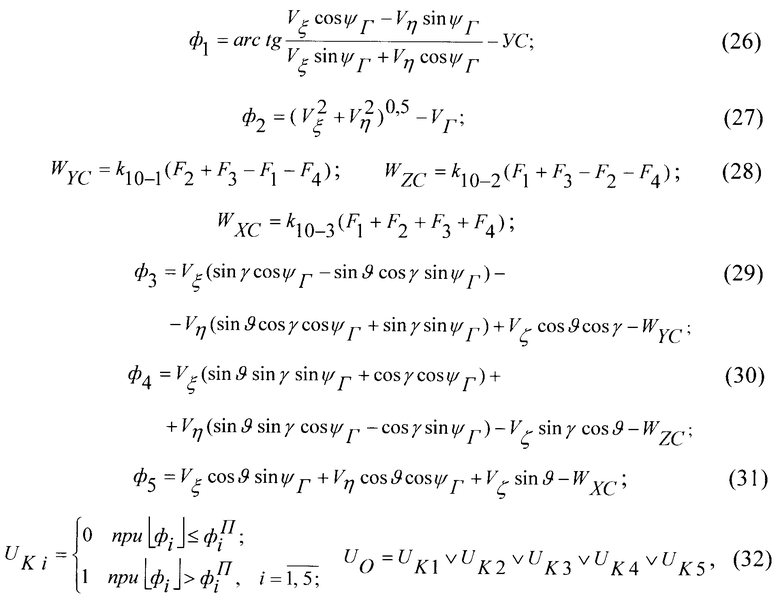
где k10-1, k10-2, k10-3 - приведенные, в соответствии с выражениями (5)÷(7) или (8)÷(10), значения коэффициентов усиления сумматоров 10-1, 10-2, 10-3 на четыре входа соответственно для четырех- или трехлучевого доплеровского измерителя 2; фi,  - функции точности контроля и пороги срабатывания компараторов, UKi - выходной сигнал i-го компаратора; UO - выходной сигнал схемы ИЛИ 11, являющийся дизъюнкцией сигналов компараторов.
- функции точности контроля и пороги срабатывания компараторов, UKi - выходной сигнал i-го компаратора; UO - выходной сигнал схемы ИЛИ 11, являющийся дизъюнкцией сигналов компараторов.
Система для контроля пилотажно-навигационного комплекса (фиг.1), содержащего инерциальную систему 1 и доплеровский измеритель 2, имеет первый квадратор 3-1. Вход первого квадратора 3-1 соединен с выходом северной составляющей Vξ скорости инерциальной системы 1, вход второго квадратора 3-2 соединен с выходом западной составляющей Vη скорости инерциальной системы 1, а их выходы - соединены с входами сумматора 4-1. Один вход схемы 5-1 вычитания соединен с выходом доплеровского измерителя 2, а выход - с входом первого компаратора 6-1. Выход горизонтальной проекции VГ доплеровского измерителя 2 соединен с входом схемы 5-2 вычитания, выход которой соединен с входом второго компаратора 6-2. Выходы схем 5-3, 5-4, 5-5 вычитания соединены соответственно с входами компараторов 6-3, 6-4, 6-5. Первый вход делителя 7 и его второй вход - делимого соединены соответственно с первым и вторым выходами первого преобразователя 8-1 координат, первый вход которого соединен с выходом северной составляющей Vξ инерциальной системы 1. Выход тангажа и инерциальной системы 1 соединен со входами функциональных преобразователей 9-1, 9-2, выход крена γ инерциальной системы 1 соединен со входами функциональных преобразователей 9-3, 9-4, а выход гироскопического курса ψГ инерциальной системы 1 соединен со входами функциональных преобразователей 9-5, 9-6. Второй вход преобразователя 8-1 координат соединен с выходом функционального преобразователя 9-5, третий вход - с выходом функционального преобразователя 9-6, четвертый вход - с выходом вертикальной составляющей Vζ скорости, а пятый вход - с выходом западной составляющей Vη скорости инерциальной системы 1. Выход делителя 7 через седьмой функциональный преобразователь 9-7 соединен с другим входом схемы вычитания 5-1. Третий выход преобразователя 8-1 координат соединен с первым входом преобразователя 8-2 координат, второй и третий входы которого соединены соответственно с выходами функциональных преобразователей 9-1 и 9-2. Четвертый и пятый входы преобразователя 8-2 координат соединены соответственно со вторым и первым выходами преобразователя 8-1 координат. Первый вход преобразователя 8-3 координат соединен с третьим выходом преобразователя 8-2, второй и третий входы - соответственно соединены с выходами функциональных преобразователей 9-3 и 9-4, четвертый вход - первым выходом преобразователя 8-2 координат, а пятый вход - со вторым выходом преобразователя 8-2. Вход функционального преобразователя 9-8 соединен с выходом сумматора 4-1, а выход - с другим входом схемы 5-2 вычитания. Один вход третьей схемы 5-3 вычитания соединен с первым выходом преобразователя 8-3 координат, другой вход - с выходом первого сумматора 10-1 на четыре входа. Один вход четвертой схемы 5-4 вычитания соединен с вторым выходом преобразователя 8-3 координат, другой вход - с выходом второго сумматора 10-2 на четыре входа. Один вход пятой схемы 5-5 вычитания соединен с третьим выходом преобразователя 8-3 координат, другой вход - с выходом третьего сумматора 10-3 на четыре входа. Первый вычитающий вход первого сумматора 10-1 на четыре входа и первые суммирующие входы сумматоров 10-2, 10-3 на четыре входа соединены с выходом первой частоты доплеровского измерителя 2. Вторые суммирующие входы сумматоров 10-1 и 10-3 на четыре входа и второй вычитающий вход сумматора 10-2 на четыре входа соединены с выходом второй частоты доплеровского измерителя 2. Третьи суммирующие входы сумматоров 10-1, 10-2 и 10-3 на четыре входа соединены с выходом третьей частоты доплеровского измерителя 2. Четвертые вычитающие входы сумматоров 10-1 и 10-2 на четыре входа и четвертый суммирующий вход сумматора 10-3 на четыре входа соединены с выходом четвертой частоты доплеровского измерителя 2. Выходы компараторов 6-1, 6-2, 6-3, 6-4, 6-5 соединены с входами схемы ИЛИ 11, выход которой является выходом системы.
Преобразователь 8-1, 8-2, 8-3 координат (фиг.2) содержит последовательно соединенные умножитель 12-1, первый вход которого соединен с первым входом преобразователя 8-1, 8-2, 8-3 координат, второй вход - со вторым входом преобразователя 8-1, 8-2, 8-3 координат, сумматор 4-2, второй вход которого соединен с выходом умножителя 12-2, а выход - с первым выходом преобразователя 8-1, 8-2, 8-3 координат, последовательно соединенные умножитель 12-3, первый вход которого соединен с первым входом преобразователя 8-1, 8-2, 8-3 координат, второй вход - с третьим входом преобразователя 8-1, 8-2, 8-3 координат, схема 5-6 вычитания, суммирующий вход которого соединен с выходом умножителя 12-3, вычитающий вход - с выходом умножителя 12-4, а выход - со вторым выходом преобразователя 8-1, 8-2, 8-3 координат, четвертый вход преобразователя 8-1, 8-2, 8-3 координат соединен с его третьим выходом, пятый вход-с первыми входами умножителей 12-2, 12-4, вторые входы которых соединены соответственно с третьим и вторым входами преобразователя 8-1, 8-2, 8-3 координат.
Практическая реализация системы для контроля пилотажно-навигационного комплекса возможна на аналоговой [4] или цифровой схемотехнической базе [4-6]. При этом в качестве инерциальной системы 1 может рассматриваться как платформенная И-11, МИС, И-21, так и бесплатформенная инерциальная система ЛИНС-2000, LTN-92, И-42 и др. или инерциальная курсовертикаль ИКВ-1, ИКВ-8, ИКВ-72, Ц-060, LCR-93, ИКВ-802, а в качестве доплеровского измерителя 2 - четырехлучевой или трехлучевой измеритель непрерывного излучения с немодулированным или частотномодулированным сигналом ДИСС-3, ДИСС-7, ДИСС-013, ДИСС-016, П-11, ШО-13, ДИСС-015 [7-10]. Алгоритмическая реализация системы предпочтительна на бортовых вычислителях В-144 (пилотажно-навигационный комплекс НПК-144, КН-23), ЦВМ20-ХХХ, ЦВМ80-30ХХХ, БЦВМ-386/486 [7, с.337-341; 10, с.258; 11, с.95; 12, с.539]. Преобразование доплеровских частот F1, F2, F3, F4, и в частности их сложение для реализации сумматоров 10-1, 10-2,10-3 на четыре входа, возможно по схемам [2, с.115; 10, с.255-269].
Устройство для контроля пилотажно-навигационного комплекса работает следующим образом. Инерциальная система 1 выдает в пилотажно-навигационный комплекс сигналы, пропорциональные углам крена γ, тангажа ϑ, гироскопического курса ψГ, проекциям вектора  скорости полета самолета на оси географически ориентированной, горизонтальной системы координат: Vξ - северной составляющей скорости, Vη - западной составляющей скорости, Vζ - вертикальной составляющей скорости. Одновременно доплеровский измеритель 2 выдает сигналы, пропорциональные горизонтальной проекции VГ скорости, углу УС скольжения, доплеровским частотам F1, F2, F3, F4. Сигналы, пропорциональные северной Vξ составляющей скорости, вертикальной составляющей Vζ скорости, западной Vη составляющей скорости, поступают на первый, четвертый, пятый входы преобразователя 8-1 координат. На входы функциональных преобразователей 9-5 и 9-6 поступает сигнал, пропорциональный углу гироскопического курса ψГ с инерциальной системы 1. Тогда на второй и третий входы преобразователя 8-1 координат с выходов функциональных преобразователей 9-5 и 9-6 поступают сигналы, пропорциональные sinψГ и cosψГ соответственно. После преобразования на первом, втором и третьем выходах преобразователя 8-1 координат получаются сигналы вида (17), (18), (19), пропорциональные проекциям скорости на оси OXopYopZop частной ортодромической системы координат. Сигналы с первого и второго выходов преобразователя 8-1 координат поступают на делитель 7, где формируется отношение горизонтальных проекций VZO/VXO вектора скорости. Пройдя через функциональный преобразователь 9-7, на его выходе получается сигнал arctg(VZO/VXO), пропорциональный оценке
скорости полета самолета на оси географически ориентированной, горизонтальной системы координат: Vξ - северной составляющей скорости, Vη - западной составляющей скорости, Vζ - вертикальной составляющей скорости. Одновременно доплеровский измеритель 2 выдает сигналы, пропорциональные горизонтальной проекции VГ скорости, углу УС скольжения, доплеровским частотам F1, F2, F3, F4. Сигналы, пропорциональные северной Vξ составляющей скорости, вертикальной составляющей Vζ скорости, западной Vη составляющей скорости, поступают на первый, четвертый, пятый входы преобразователя 8-1 координат. На входы функциональных преобразователей 9-5 и 9-6 поступает сигнал, пропорциональный углу гироскопического курса ψГ с инерциальной системы 1. Тогда на второй и третий входы преобразователя 8-1 координат с выходов функциональных преобразователей 9-5 и 9-6 поступают сигналы, пропорциональные sinψГ и cosψГ соответственно. После преобразования на первом, втором и третьем выходах преобразователя 8-1 координат получаются сигналы вида (17), (18), (19), пропорциональные проекциям скорости на оси OXopYopZop частной ортодромической системы координат. Сигналы с первого и второго выходов преобразователя 8-1 координат поступают на делитель 7, где формируется отношение горизонтальных проекций VZO/VXO вектора скорости. Пройдя через функциональный преобразователь 9-7, на его выходе получается сигнал arctg(VZO/VXO), пропорциональный оценке  угла скольжения самолета. Вычитая из этой оценки измеренное доплеровским измерителем 2 значение УС угла скольжения в схеме 5-1 вычитания, получаем сигнал пропорциональный функции контроля Ф1 по выражению (26). Сигналы, пропорциональные северной Vξ составляющей скорости и западной Vη составляющей скорости, с выходов инерциальной системы 1 поступают соответственно на входы первого 3-1 и второго 3-2 квадраторов. Выходные сигналы последних поступают на входы сумматора 4-1 и далее на функциональный преобразователь 9-8 так, что после его прохождения получается сигнал пропорциональный
угла скольжения самолета. Вычитая из этой оценки измеренное доплеровским измерителем 2 значение УС угла скольжения в схеме 5-1 вычитания, получаем сигнал пропорциональный функции контроля Ф1 по выражению (26). Сигналы, пропорциональные северной Vξ составляющей скорости и западной Vη составляющей скорости, с выходов инерциальной системы 1 поступают соответственно на входы первого 3-1 и второго 3-2 квадраторов. Выходные сигналы последних поступают на входы сумматора 4-1 и далее на функциональный преобразователь 9-8 так, что после его прохождения получается сигнал пропорциональный  , то есть оценка горизонтальной проекции вектора скорости полета. Вычитая из этой оценки измеренное доплеровским измерителем 2 значение VГ горизонтальной проекции вектора скорости в схеме 5-2 вычитания, получается сигнал пропорциональный функции контроля Ф2 по выражению (27). Сигнал, пропорциональный углу ϑ тангажа, с инерциальной системы 1 поступает на входы первого 9-1 и второго 9-2 функциональных преобразователей так, что на их выходах соответственно получаются сигналы, пропорциональные тригонометрическим выражениям sinϑ и cosϑ. Они поступают на второй и третий входы преобразователя 8-2 координат, на первый, четвертый, пятый входы которого одновременно поступают сигналы VYO, VZO, VXO, пропорциональные проекциям вектора
, то есть оценка горизонтальной проекции вектора скорости полета. Вычитая из этой оценки измеренное доплеровским измерителем 2 значение VГ горизонтальной проекции вектора скорости в схеме 5-2 вычитания, получается сигнал пропорциональный функции контроля Ф2 по выражению (27). Сигнал, пропорциональный углу ϑ тангажа, с инерциальной системы 1 поступает на входы первого 9-1 и второго 9-2 функциональных преобразователей так, что на их выходах соответственно получаются сигналы, пропорциональные тригонометрическим выражениям sinϑ и cosϑ. Они поступают на второй и третий входы преобразователя 8-2 координат, на первый, четвертый, пятый входы которого одновременно поступают сигналы VYO, VZO, VXO, пропорциональные проекциям вектора  скорости самолета на оси частной ортодромической системы координат. После преобразования на первом, втором и третьем выходах преобразователя 8-2 координат получаются сигналы вида (20), (21), (22), пропорциональные проекциям скорости VXC, VY1, VZO на оси системы координат OXCY1ZO. Сигнал, пропорциональный углу γ крена, с инерциальной системы 1 поступает на входы третьего 9-3 и четвертого 9-4 функциональных преобразователей так, что на их выходах соответственно получаются сигналы, пропорциональные тригонометрическим выражениям sinγ и cosγ. Они поступают на второй и третий входы преобразователя 8-3 координат, на первый, четвертый, пятый входы которого одновременно поступают сигналы VZO, VXC, VY1, пропорциональные проекциям вектора
скорости самолета на оси частной ортодромической системы координат. После преобразования на первом, втором и третьем выходах преобразователя 8-2 координат получаются сигналы вида (20), (21), (22), пропорциональные проекциям скорости VXC, VY1, VZO на оси системы координат OXCY1ZO. Сигнал, пропорциональный углу γ крена, с инерциальной системы 1 поступает на входы третьего 9-3 и четвертого 9-4 функциональных преобразователей так, что на их выходах соответственно получаются сигналы, пропорциональные тригонометрическим выражениям sinγ и cosγ. Они поступают на второй и третий входы преобразователя 8-3 координат, на первый, четвертый, пятый входы которого одновременно поступают сигналы VZO, VXC, VY1, пропорциональные проекциям вектора  скорости самолета на оси системы координат OXCY1ZO. После преобразования на первом, втором и третьем выходах преобразователя 8-3 координат получаются сигналы вида (23), (24), (25), пропорциональные оценкам проекций вектора скорости
скорости самолета на оси системы координат OXCY1ZO. После преобразования на первом, втором и третьем выходах преобразователя 8-3 координат получаются сигналы вида (23), (24), (25), пропорциональные оценкам проекций вектора скорости  ,
,  ,
,  на оси связанной системы координат OXCYCZC. Сигналы, пропорциональные доплеровским частотам F1, F2, F3, F4, c доплеровского измерителя 2 поступают соответственно на первые, вторые, третьи, четвертые входы сумматоров 10-1, 10-2, 10-3 на четыре входа. На первый и четвертый вычитающие входы сумматора 10-1 на четыре входа приходят сответственно сигналы первой и четвертой доплеровской частоты, а на второй и третий суммирующие входы - сигналы второй и третьей доплеровской частоты с доплеровского измерителя 2. На второй и четвертый вычитающие входы сумматора 10-2 на четыре входа приходят сответственно сигналы второй и четвертой доплеровской частоты, а на первый и третий суммирующие входы - сигналы первой и третьей доплеровской частоты с доплеровского измерителя 2. На первый, второй, третий и четвертый суммирующие входы сумматора 10-3 на четыре входа приходят соответственно сигналы первой, второй, третий и четвертой доплеровской частоты с доплеровского измерителя 2. Это позволяет, в соответствии с выражениями (28), получить в пилотажно-навигационном комплексе точные значения проекций WYC, WZC, WXC скорости на оси связанной системы координат, которые измерены доплеровским измерителем 2. Вычитая из оценок
на оси связанной системы координат OXCYCZC. Сигналы, пропорциональные доплеровским частотам F1, F2, F3, F4, c доплеровского измерителя 2 поступают соответственно на первые, вторые, третьи, четвертые входы сумматоров 10-1, 10-2, 10-3 на четыре входа. На первый и четвертый вычитающие входы сумматора 10-1 на четыре входа приходят сответственно сигналы первой и четвертой доплеровской частоты, а на второй и третий суммирующие входы - сигналы второй и третьей доплеровской частоты с доплеровского измерителя 2. На второй и четвертый вычитающие входы сумматора 10-2 на четыре входа приходят сответственно сигналы второй и четвертой доплеровской частоты, а на первый и третий суммирующие входы - сигналы первой и третьей доплеровской частоты с доплеровского измерителя 2. На первый, второй, третий и четвертый суммирующие входы сумматора 10-3 на четыре входа приходят соответственно сигналы первой, второй, третий и четвертой доплеровской частоты с доплеровского измерителя 2. Это позволяет, в соответствии с выражениями (28), получить в пилотажно-навигационном комплексе точные значения проекций WYC, WZC, WXC скорости на оси связанной системы координат, которые измерены доплеровским измерителем 2. Вычитая из оценок  ,
,  ,
,  , на выходах преобразователя 8-3 координат измеренные доплеровским измерителем 2 значения соответственно проекций вектора скорости WYC, WZC, WXC в схемах 5-3, 5-4, 5-5 вычитания, на выходах схем 5-3, 5-4, 5-5 вычитания получаем сигналы, пропорциональные функциям контроля Ф3, Ф4, Ф5, представленным выражениями (29)-(31). Учитывая ограниченную точность приборов пилотажно-навигационного комплекса, ожидаемые нулевые значения сигналов функций контроля Ф1, Ф2, Ф3, Ф4, Ф5 следует сравнивать соответственно в компараторах 6-1, 6-2, 6-3, 6-4, 6-5 с соответствующими пороговыми значениями
, на выходах преобразователя 8-3 координат измеренные доплеровским измерителем 2 значения соответственно проекций вектора скорости WYC, WZC, WXC в схемах 5-3, 5-4, 5-5 вычитания, на выходах схем 5-3, 5-4, 5-5 вычитания получаем сигналы, пропорциональные функциям контроля Ф3, Ф4, Ф5, представленным выражениями (29)-(31). Учитывая ограниченную точность приборов пилотажно-навигационного комплекса, ожидаемые нулевые значения сигналов функций контроля Ф1, Ф2, Ф3, Ф4, Ф5 следует сравнивать соответственно в компараторах 6-1, 6-2, 6-3, 6-4, 6-5 с соответствующими пороговыми значениями  ,
,  ,
,  ,
,  ,
,  . При отличии даже одного (или нескольких) из выходных сигналов схем 5-1, 5-2, 5-3, 5-4, 5-5 вычитания от допустимого порога происходит срабатывание соответствующего компаратора (или компараторов), что через схему ИЛИ сообщает сигналом UO об отказе, представленном выражениями (32), либо инерциальной системы 1, либо доплеровского измерителя 2 контролируемого пилотажно-навигационного комплекса.
. При отличии даже одного (или нескольких) из выходных сигналов схем 5-1, 5-2, 5-3, 5-4, 5-5 вычитания от допустимого порога происходит срабатывание соответствующего компаратора (или компараторов), что через схему ИЛИ сообщает сигналом UO об отказе, представленном выражениями (32), либо инерциальной системы 1, либо доплеровского измерителя 2 контролируемого пилотажно-навигационного комплекса.
Как следует из вышеизложенного, достижение технического результата - эффективного контроля пилотажно-навигационного комплекса, содержащего инерциальную систему и доплеровский измеритель обеспечивается введением в устройство, принятое за прототип и содержащее первый, второй, третий, четвертый функциональные преобразователи, входы которых соединены соответственно с выходами тангажа и крена инерциальной системы, сумматор на четыре входа и компаратор, первого и второго квадраторов, сумматора, первой, второй, третьей, четвертой, пятой схемы вычитания, делителя, первого, второго, третьего преобразователя координат, пятого, шестого, седьмого, восьмого функциональных преобразователя, второго, третьего, четвертого, пятого компараторов, второго, третьего сумматоров на четыре входа и схемы ИЛИ со связями, указанными в формуле изобретения.
Система обладает высокой эффективностью автоматического, без участия пилота, контроля работоспособности и точности функционирования пилотажно-навигационного комплекса, содержащего инерциальную систему и доплеровский измеритель, по всем выходным сигналам этих приборов. Так, если в прототипе проверялся крен, тангаж, вертикальная скорость инерциальной системы, а также продольная, нормальная и поперечная составляющие вектора скорости на оси связанной системы координат от доплеровского измерителя, то в заявляемой системе проверяются крен, тангаж, гироскопический курс, северная составляющая скорости, западная составляющая скорости, вертикальная скорость инерциальной системы, а также продольная, нормальная, поперечная составляющие вектора скорости на оси связанной системы координат по точным, частотным выходам, горизонтальная проекция вектора скорости и угол скольжения по аналоговым выходам от доплеровского измерителя. Полнота и информационная производительность контроля [3, с.13] в заявляемой системе составляет 0,929 бит/с, что в 1,5 раза больше, чем в прототипе. Особо здесь следует отметить возможность точного контроля гироскопического курса ψГ. Известные устройства для контроля этого параметра в пилотажно-навигационном комплексе либо примитивны и неточны [13, с.75, 162, 171, 172, 210], либо имеют большие габариты, вес, сложность [8, с.295] при сравнительно низкой точности 3÷7 угл. град. и троекратном составе инерциальных систем комплекса. Заявляемая система реализует безынерционный и достаточно универсальный алгоритм контроля пилотажно-навигационного комплекса, который может содержать платформенные и бесплатформенные инерциальные системы, курсовертикали или гировертикали и курсовые системы, баро- радиоизмерители вертикальной скорости и аэрометрические навигационные автоматы с трех- четырехлучевыми доплеровскими измерителями скорости и угла сноса. Точность многопараметрического контроля пилотажно-навигационного комплекса в заявляемой системе составляет σW,V=2,11 м/с;  угл. град.; σϑ,γ=0,75÷1 угл. град. и в наибольшей мере зависит от точности инерциальной системы и доплеровского измерителя, которая для рассматриваемого состава: ИКВ-802 (σV=2 м/с; σϑ,γ,ψ=7,5÷15 угл. мин.) и ДИСС-016 (σW=(0,12÷0,25%) W=0,05÷0,9 м/с; σУС=7,5÷10 угл. мин. [7, 9] типовых приборов комплекса имеет возможность для повышения. Достоверность контроля такой конфигурации комплекса РД=0,86, что больше ранее рассмотренных аналогов, но равняется наибольшему значению, имеющему место только при дублировании приборов. Заявляемая система контроля не требует для своей работы встраивания специальных измерителей в проверяемые приборы пилотажно-навигационного комплекса, а значит не увеличивает их сложность и не снижает надежность, как в аналогах. Она реализуется программными средствами штатной БЦВМ, напрмер ЦВМ-80 [7], а значит не приводит к росту стоимости, веса, габаритов, энергопотребления комплекса. Стоимостной показатель реализации контроля здесь особенно важен, так как стоимость контролируемых инерциальной системы (приближенно 72000 у.е.) и доплеровского измерителя (105000 у.е.) велика. Даже простое их дублирование ведет к значительному повышению стоимости пилотажно-навигационного комплекса, а если это делается для контролепригодности, то это недопустимо. Практика создания высоконадежных пилотажно-навигационных комплексов указывает на плодотворность комплексирования, в том числе для решения задач контроля, на основе применения разных по физическому принципу работы приборов. Это и реализуется в заявляемой системе для электромеханической инерциальной системы и радиотехнического доплеровского измерителя.
угл. град.; σϑ,γ=0,75÷1 угл. град. и в наибольшей мере зависит от точности инерциальной системы и доплеровского измерителя, которая для рассматриваемого состава: ИКВ-802 (σV=2 м/с; σϑ,γ,ψ=7,5÷15 угл. мин.) и ДИСС-016 (σW=(0,12÷0,25%) W=0,05÷0,9 м/с; σУС=7,5÷10 угл. мин. [7, 9] типовых приборов комплекса имеет возможность для повышения. Достоверность контроля такой конфигурации комплекса РД=0,86, что больше ранее рассмотренных аналогов, но равняется наибольшему значению, имеющему место только при дублировании приборов. Заявляемая система контроля не требует для своей работы встраивания специальных измерителей в проверяемые приборы пилотажно-навигационного комплекса, а значит не увеличивает их сложность и не снижает надежность, как в аналогах. Она реализуется программными средствами штатной БЦВМ, напрмер ЦВМ-80 [7], а значит не приводит к росту стоимости, веса, габаритов, энергопотребления комплекса. Стоимостной показатель реализации контроля здесь особенно важен, так как стоимость контролируемых инерциальной системы (приближенно 72000 у.е.) и доплеровского измерителя (105000 у.е.) велика. Даже простое их дублирование ведет к значительному повышению стоимости пилотажно-навигационного комплекса, а если это делается для контролепригодности, то это недопустимо. Практика создания высоконадежных пилотажно-навигационных комплексов указывает на плодотворность комплексирования, в том числе для решения задач контроля, на основе применения разных по физическому принципу работы приборов. Это и реализуется в заявляемой системе для электромеханической инерциальной системы и радиотехнического доплеровского измерителя.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- средство, воплощяющее устройство-изобретение при его осуществлении, предназначено для использования в авиационной технике и, в частности, для контроля пилотажно-навигацнонного комплекса, содержащего инерциальную систему и доплеровский измеритель. Оно может использоваться для повышения безопасности полета;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности „промышленная применимость".
Источники информации
1. Волкоедов А.П., Паленый Э.Г. Оборудование самолетов. М.: Машиностроение, 1980. 229 с.
2. Флеров А.Г., Тимофеев В.Т. Доплеровские устройства и системы навигации. М.: Транспорт, 1987. 191 с.
3. Боднер В.А. Системы управления летательными аппаратами. М.: Машиностроение, 1973. 506 с.
4. Аналоговые и цифровые интегральные микросхемы: Справочное пособие / Под ред. С.В.Якубовского. М.: Радио и связь, 1984. 432 с.
5. Цифровые процессоры обработки сигналов: Справочник / А.Г.Остапенко, С.И.Лавлинский, А.Б.Сушков и др. Под ред. А.Г.Остапенко. М.: Радио и связь, 1994. 264 с.
6. Проектирование цифровых устройств на однокристальных микропроцессорах / В.В.Сташин, А.В.Урусов, О.Ф.Мологонцев. М.: Энергоатомиздат, 1990. 224 с.
7. Авионика России. Энциклопедический справочник / Под общ. ред. С.Д.Бодрунова. СПб.: Национальная Ассоциация авиаприборостроителей, 1999. 780 с.
8. Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. 399 с.
9. Авиационная радионавигация: Справочник / А.А.Сосновский, И.А.Хаймович, Э.А.Лутин, И.Б.Максимов. Под ред. А.А.Сосновского. М.: Транспорт, 1990. 264 с.
10. Колчинский В.Е., Мандуровский И.А., Константиновский М.И. Автономные допплеровские устройства и системы навигации летательных аппаратов. Под ред. В.Е.Колчинского. М.: Сов. радио, 1975. 432 с.
11. Бедретдинов И. Штурмовик СУ-25 и его модификации. М.: Изд. гр. Бедретдинов и Ко., 2002. 400 с.
12. Авиация ПВО России и научно-технический прогресс: боевые комплексы и системы вчера, сегодня, завтра / Под ред. Е.А.Федосова. М.: Дрофа, 2004. 816 с.
13. Богданченко Н.М. Курсовые системы и их эксплуатация на самолетах. М.: Транспорт, 1983. 224 с.
Изобретение относится к области приборостроения и может быть использовано для наземного и полетного контроля пилотажно-навигационного комплекса самолета, вертолета, беспилотного летательного аппарата. Технический результат - точность контроля. Для достижения данного результата система содержит функциональные преобразователи, сумматоры на четыре входа, преобразователи координат, делитель, схемы вычитания, компараторы и логическую схему ИЛИ. Используются измеренные значения вектора скорости и угловые координаты самолета для аналоговых и частотных выходных сигналов доплеровского измерителя, что обеспечивает повышение точности и достоверности контроля состояния подвижного объекта. 1 з.п. ф-лы, 3 ил.
1. Система для контроля пилотажно-навигационного комплекса, содержащая инерциальную систему и доплеровский измеритель, первый и второй функциональные преобразователи, входы которых соединены с выходом тангажа инерциальной системы, третий и четвертый функциональные преобразователи, входы которых соединены с выходом крена инерциальной системы, сумматор на четыре входа и компаратор, отличающаяся тем, что в нее введены первый и второй квадраторы, сумматор, делитель, первый, второй, третий преобразователи координат, пятый, шестой, седьмой, восьмой функциональные преобразователи, второй, третий сумматоры на четыре входа, первая, вторая, третья, четвертая, пятая схемы вычитания, второй, третий, четвертый, пятый компараторы, выходы которых, как и выход первого компаратора, соединены с входом схемы ИЛИ, причем вход первого квадратора, как и первый вход первого преобразователя координат, соединены с выходом северной составляющей скорости инерциальной системы, второй и третий входы первого преобразователя координат соединены соответственно с выходами пятого и шестого функциональных преобразователей, входы которых соединены с выходом гироскопического курса инерциальной системы, четвертый вход первого преобразователя координат - с выходом вертикальной составляющей скорости инерциальной системы, пятый вход первого преобразователя координат, как и вход второго квадратора - с выходом западной составляющей скорости инерциальной системы, выходы первого и второго квадраторов соединены с входами первого сумматора, первый и второй выходы первого преобразователя координат соединены соответственно с первым и вторым входами делителя, выход которого соединен с входом последовательно соединенных седьмого функционального преобразователя, первой схемы вычитания и первого компаратора, третий выход первого преобразователя координат соединен с первым входом второго преобразователя координат, второй и третий входы которого соединены соответственно с выходами первого и второго функциональных преобразователей, четвертый и пятый входы второго преобразователя координат - со вторым и первым выходами первого преобразователя координат, первый вход третьего преобразователя координат соединен с третьим выходом второго преобразователя координат, второй и третий входы третьего преобразователя координат соединены соответственно с выходами третьего и четвертого функциональных преобразователей, а четвертый и пятый входы - с первым и вторым выходами второго преобразователя координат, выход первого сумматора через восьмой функциональный преобразователь соединен с входом второй схемы вычитания, второй вход которой соединен с выходом горизонтальной проекции скорости доплеровского измерителя, а выход - с входом второго компаратора, первый выход третьего преобразователя координат соединен с последовательно соединенными третьей схемой вычитания, третьим компаратором, второй выход третьего преобразователя координат соединен с последовательно соединенными четвертой схемой вычитания, четвертым компаратором, третий выход третьего преобразователя координат соединен с последовательно соединенными пятой схемой вычитания, пятым компаратором, второй вход первой схемы вычитания соединен с выходом угла скольжения доплеровского измерителя, второй вход третьей схемы вычитания соединен с выходом первого сумматора на четыре входа, первый вычитающий вход которого соединен с выходом первой частоты доплеровского измерителя, второй суммирующий вход - с выходом второй частоты доплеровского измерителя, третий суммирующий вход - с выходом третьей частоты доплеровского измерителя, четвертый вычитающий вход - с выходом четвертой частоты доплеровского измерителя, второй вход четвертой схемы вычитания соединен с выходом второго сумматора на четыре входа, первый суммирующий вход которого соединен с выходом первой частоты доплеровского измерителя, второй вычитающий вход - с выходом второй частоты допперовского измерителя, третий суммирующий вход - с выходом третьей частоты доплеровского измерителя, четвертый вычитающий вход - с выходом четвертой частоты доплеровского измерителя, второй вход пятой схемы вычитания соединен с выходом третьего сумматора на четыре входа, первый суммирующий вход которого соединен с выходом первой частоты доплеровского измерителя, второй вход - с выходом второй частоты доплеровского измерителя, третий вход - с выходом третьей частоты доплеровского измерителя, четвертый вход - с выходом четвертой частоты доплеровского измерителя, выход схемы ИЛИ является выходом системы.
2. Система для контроля пилотажно-навигационного комплекса по п.1, отличающаяся тем, что преобразователь координат содержит последовательно соединенные первый умножитель, первый вход которого соединен с первым входом преобразователя координат, второй вход - со вторым входом преобразователя координат, и второй сумматор, второй вход которого соединен с выходом второго умножителя, а выход - с первым выходом преобразователя координат, последовательно соединенные третий умножитель, первый вход которого соединен с первым входом преобразователя координат, второй вход - с третьим входом преобразователя координат, и шестая схема вычитания, суммирующий вход которой соединен с выходом третьего умножителя, вычитающий вход - с выходом четвертого умножителя, а выход - со вторым выходом преобразователя координат, четвертый вход преобразователя координат соединен с его третьим выходом, пятый вход - с первыми входами второго и четвертого умножителей, вторые входы которых соединены соответственно с третьим и вторым входами преобразователя координат.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОСТРОИТЕЛЯ ВЕРТИКАЛИ И ДАТЧИКОВ СКОРОСТЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2187141C1 |
| БЕЛОГОРСКИЙ С.Л | |||
| Автоматизация управления посадкой самолета | |||
| - М.: Транспорт, 1972, с.270-271 | |||
| RU 2063647 C1, 10.07.1996 | |||
| ФЛЕРОВ А.Г., ТИМОФЕЕВ В.Т | |||
| Доплеровские устройства и системы навигации | |||
| - М.: Транспорт, 1987, 191 с | |||
| КОЗАРУК В.В | |||
| Способ приготовления кирпичей для футеровки печей, служащих для получения сернистого натрия из серно-натриевой соли | 1921 |
|
SU154A1 |
| - М.: Машиностроение, 1993, с.53-54. | |||

