Изобретение относится к гидроакустической технике, а именно к системам гидролокации, и может быть использовано в системах обнаружения подводных объектов и измерения их координат и других параметров движения.
Известен гидроакустический комплекс, реализующий способ автоматического сопровождения маневрирующей цели, защищенный патентом РФ №2260197, кл. G01S 13/66, 2003 г. Он содержит устройство формирования зондирующего сигнала, передающую антенну, устройство обработки эхо-сигнала, устройство измерения пеленга на цель, устройство измерения радиальной составляющей скорости цели, измеритель пеленга цели в режиме шумопеленгования и измеритель скорости изменения пеленга.
Все перечисленные устройства этого аналога входят и в состав заявляемой системы.
Причиной, препятствующей достижению в этом комплексе технического результата, достигаемого в заявляемой системе, являются большие затраты времени (большое число циклов излучения-приема активного гидролокатора) для определения параметров движения цели с приемлемой точностью.
Известна также система гидролокации гидроакустической станции, содержащая устройство формирования зондирующего сигнала, генераторное устройство, приемную и передающую антенны, устройство обработки эхо-сигналов, тракт шумопеленгования, блок связи системы гидролокации с системами корабля [Евтюгов А.П., Колесников А.Е., Корепин Е.А. и др. Справочник по гидроакустике. 2-е изд. - Л.: Судостроение. - 1988, с.18-25, 27-29].
Все перечисленные элементы этой системы гидролокации входят и в состав заявляемой системы.
Причиной, препятствующей достижению в этой системе технического результата, достигаемого в заявляемой системе, являются достаточно ограниченные функциональные возможности системы. В частности, система не позволяет определять скорость и курс цели, необходимые для ее квалификации.
Наиболее близкой по технической сущности к заявляемой (прототипом) является система гидролокации, защищенная патентом РФ №2393503, кл. G01S 15/00, 2009 г., содержащая передающую антенну тракта активной гидролокации (АГЛ), приемные антенные устройства трактов АГЛ и шумопеленгования, генераторное устройство, устройство формирования зондирующего сигнала, устройство обработки эхо-сигналов цели, устройство обработки сигналов тракта шумопеленгования, устройство измерения пеленга тракта шумопеленгования, блок определения скорости изменения пеленга, устройство измерения дистанции до цели, устройство измерения радиальной составляющей скорости цели, вычислитель и блок связи с системами корабля-носителя.
Работа этой системы основана на измерении пеленга на цель с помощью тракта шумоподавления, последующем включении на излучение в направлении измеренного пеленга тракта АГЛ, измерении методом АГЛ дистанции до цели, определении скорости изменения пеленга и пересчета измеренных параметров в скорость и курс цели.
Признаками, общими с признаками заявляемой системы, являются все перечисленные признаки системы-прототипа.
Причиной, препятствующей достижению в системе-прототипе технического результата, достигаемого в заявляемой системе, является относительно низкая точность определения параметров движения цели. Она обусловлена тем, что определение параметров движения цели в этой системе основано на измерении пеленга цели с помощью тракта шумопеленгования, а это измерение осуществляется достаточно грубо.
Технической задачей, на решение которой направлено изобретение, является повышение точности определения параметров движения цели.
Указанный технический результат достигается тем, что в известную систему гидролокации гидроакустической станции введен блок уточнения пеленга и управления положением антенн, при этом антенны тракта АГЛ выполнены с возможностью управления положением в плоскости пеленгования, приемное антенное устройство тракта АГЛ выполнено на основе двух парциальных антенн, акустические оси которых развернуты в плоскости пеленгования на угол, примерно равный ширине основного лепестка характеристики направленности, второй выход приемного антенного устройства тракта АГЛ соединен с первым входом блока уточнения пеленга и управления положением антенн, третий выход - со входом блока определения скорости изменения пеленга и шестым входом вычислителя, а управляющий вход - со вторым управляющим выходом блока уточнения пеленга и управления положением антенн, второй вход которого подключен к выходу устройства измерения пеленга, а первый управляющий выход - к управляющему входу передающей антенны.
Для достижения технического результата в систему гидролокации гидроакустической станции, содержащей последовательно включенные устройство формирования зондирующего сигнала, генераторное устройство и передающую антенну, тракт шумопеленгования, содержащий последовательно включенные антенное устройство, устройство обработки сигналов шумопеленгования и устройство измерения пеленга, подключенное своим выходом ко второму входу генераторного устройства, последовательно включенные приемное антенное устройство тракта активной гидролокации, устройство обработки эхо-сигнала и устройство измерения радиальной составляющей скорости цели, блок определения скорости изменения пеленга, устройство измерения дистанции до цели, первый и второй входы которого подключены ко вторым выходам устройства обработки эхо-сигналов и устройства формирования зондирующего сигнала соответственно, блок связи с системами корабля-носителя и вычислитель, первый и второй входы которого подключены к выходам блока определения скорости изменения пеленга и устройства измерения дистанции до цели соответственно, третий вход - к выходу устройства измерения радиальной составляющей скорости цели, а четвертый и пятый входы - соответственно к первому и второму выходам блока связи с системами корабля-носителя, введен блок уточнения пеленга и управления положением антенн, при этом антенны тракта активной гидролокации выполнены с возможностью управления положением в плоскости пеленгования, приемное антенное устройство тракта активной гидролокации выполнено на основе двух парциальных антенн, акустические оси которых развернуты в плоскости пеленгования на угол, примерно равный ширине основного лепестка характеристики направленности, второй выход приемного антенного устройства тракта активной гидролокации соединен с первым входом блока уточнения пеленга и управления положением антенн, третий выход - со входом блока определения скорости изменения пеленга и шестым входом вычислителя, а управляющий вход - со вторым управляющим выходом блока уточнения пеленга и управления положением антенн, второй вход которого подключен к выходу устройства измерения пеленга, а первый управляющий выход - к управляющему входу передающей антенны.
Сущность изобретения поясняется чертежом, на котором приведены:
- на фиг.1 - структурная схема заявляемой системы;
- на фиг.2 - характеристики направленности приемного антенного устройства тракта АГЛ.
Основу предлагаемой системы составляют две ее части: тракт АГЛ и тракт шумопеленгования.
Тракт АГЛ содержит последовательно включенные устройство 1 формирования зондирующего сигнала, генераторное устройство 2 и передающую антенну 3, последовательно включенные приемные антенное устройство 4, устройство 5 обработки эхо-сигналов цели и устройство 6 измерения радиальной составляющей скорости цели, устройство 7 измерения дистанции до цели, первый и второй входы которого соединены со вторыми выходами устройств 5 и 1 соответственно, блок 8 определения скорости изменения пеленга, вход которого соединен с третьим выходом устройства 4, и блок 9 уточнения пеленга и управления положением антенн тракта, первый вход которого соединен со вторым выходом устройства 4, а первый и второй управляющие выходы - с управляющими входами антенны 3 и устройства 4 соответственно.
Тракт шумопеленгования содержит последовательно включенные приемное антенное устройство 10, устройство 11 обработки сигналов шумопеленгования и устройство 12 измерения пеленга, выход которого соединен со вторыми входами блока 9 и устройства 2 тракта АГЛ.
Кроме того, в состав системы входят блок 13 связи с системами корабля-носителя и вычислитель 14, первый, второй и третий входы которого соединены соответственно с выходом блока 8, выходом устройства 7 и выходом устройства 6, четвертый и пятый входы - соответственно с первым и вторым выходами блока 13, а шестой вход - с третьим выходом устройства 4.
Работа системы заключается в следующем.
Сигналы шумоизлучения цели принимаются устройством 10 и проходят обработку в устройстве 11. При обнаружении шумоизлучения цели устройством 12 осуществляется измерение грубого значения пеленга ПГ на обнаруженную цель. Измеренное значение ПГ с выхода устройства 12 поступает на вторые входы устройств 2 и 9.
Тракт АГЛ включается в работу на излучение в направлении обнаруженной трактом шумопеленгования цели. Устройство 2 воспроизводит сформированный устройством 1 зондирующий сигнал с большим уровнем мощности. Этот сигнал с выхода устройства 2 поступает на вход антенны 3 и с ее помощью излучается в направлении обнаруженной цели.
Блок 9 устанавливает антенну 3 в такое положение, что излучение осуществляется в направлении на цель. Это направление задается сигналом, соответствующим значению ПГ, поступившему на второй вход блока 9 с выхода устройства 12. Синхронно с антенной 3 блок 9 устанавливает положение устройства 4 таким образом, чтобы оно принимало сигналы с того же направления, в котором излучается сигнал антенной 3.
Отраженные от цели сигналы принимаются устройством 4 и с его первого выхода поступают на вход устройства 5.
Уточнение грубого значения ПГ пеленга осуществляется с помощью блока 9 и устройства 4.
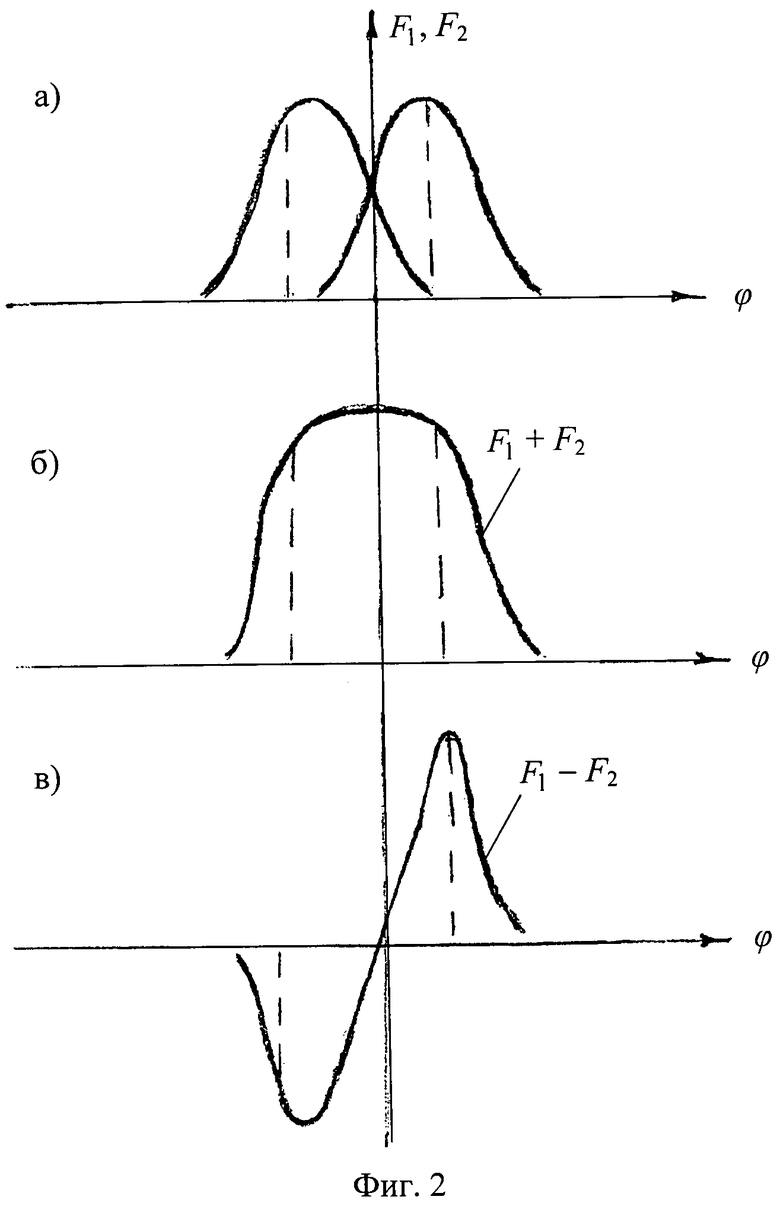
Устройство 4 содержит две узконаправленные парциальные антенны. Их акустические оси сдвинуты одна относительно другой в плоскости пеленгования примерно на ширину главного лепестка характеристики направленности. В устройстве 4 сформированы суммарная и разностная характеристики направленности парциальных антенн. На фиг.2 приведены типовые парциальные, суммарная и разностная характеристики направленности антенн устройства 4.
На фиг.2а приведены характеристики F1 и F2 направленности парциальных антенн, на фиг.2б - суммарная характеристика F1+F2 направленности, а на фиг.2в - разностная характеристика F1-F2 направленности. По оси абсцисс при этом откладывается угол φ - угол отклонения направления прихода сигнала от равносигнального направления устройства 4 (направления, с которого уровни сигналов, поступающих по парциальным антеннам с характеристиками направленности F1 и F2, одинаковы).
Суммарная характеристика F1+F2 направленности используется для формирования суммарного сигнала, то есть суммы сигналов, поступивших по парциальным антеннам. Этот сигнал с первого выхода устройства 4 поступает на вход устройства 5 для дальнейшей обработки.
Разностная характеристика F1-F2 направленности имеет форму типовой дискриминационной (пеленгационной) характеристики. Она используется для формирования разностного сигнала, равного разности сигналов, поступающих по парциальным антеннам. Нетрудно видеть, что результат вычитания пропорционален амплитуде, а знак соответствует знаку отклонения направления прихода сигнала от равносигнального направления устройства 4. Сигнал, соответствующий этому результату, то есть разностной характеристике F1-F2 направленности, со второго выхода устройства 4 поступает на первый вход блока 9. Блок 9 под действием этого сигнала вырабатывает управляющие сигналы, под действием которых антенна 3 и устройство 4 изменяют свое положение в плоскости пеленгования таким образом, что отклонение равносигнального направления устройства 4 от направления на цель уменьшается. Изменение положения антенны 3 изменяется синхронно с изменением положения устройства 4, ее акустическая ось автоматически устанавливается совпадающей с равносигнальным направлением устройства 4. В итоге равносигнальное направление устройства 4 и акустическая ось антенны 3 устанавливаются совпадающими с направлением на цель, то есть в полном соответствии с точным значением ПТ пеленга цели.
Устройство 4 снабжено внутренним датчиком, сигнализирующем о положении равносигнального направления устройства 4. В установившемся режиме, когда сигнал на втором выходе устройства 4 равен нулю или близок к нему, равносигнальное направление устройства 4 совпадает с направлением на цель. Внутренний датчик при этом формирует сигнал, соответствующий точному значению ПТ пеленга цели. Это значение поступает с третьего выхода устройства 4 на вход блока 8 и шестой вход вычислителя 14.
Поступивший на вход устройства 5 эхо-сигнал проходит в нем предварительную обработку. Результаты этой обработки с первого выхода устройства 5 поступают на вход устройства 6, а со второго - на первый вход устройства 7, на второй вход которого поступает синхроимпульс со второго выхода устройства 1.
В устройстве 6 производится измерение радиальной составляющей VP скорости цели, а результат измерения поступает с его выхода на третий вход вычислителя 14.
В устройстве 7 измеряется дистанция D до цели, а результат измерения поступает с его выхода на второй вход вычислителя 14.
В блоке 8 определяется скорость изменения (производная по времени) уточненного пеленга  цели, а результат
цели, а результат  ее определения поступает с его выхода на первый вход вычислителя 14.
ее определения поступает с его выхода на первый вход вычислителя 14.
С первого выхода блока 13 на четвертый вход вычислителя 14 поступает курс КН, а со второго выхода блока 13 на пятый вход вычислителя поступает скорость VH корабля-носителя.
В вычислителе 14 определяются следующие параметры движения цели:
- общая тангенциальная составляющая  скорости;
скорости;
- тангенциальная составляющая скорости Vt цели;
- скорость V цели;
- курс К цели.
Общая тангенциальная составляющая  скорости рассчитывается по
скорости рассчитывается по
формуле:

где D и  - дальность до цели и скорость изменения уточненного пеленга, поступающие соответственно на второй и первый входы вычислителя 14.
- дальность до цели и скорость изменения уточненного пеленга, поступающие соответственно на второй и первый входы вычислителя 14.
Тангенциальная составляющая скорости Vt цели рассчитывается по формуле:

где ПТ - уточненный пеленг цели, поступающий на шестой вход вычислителя 14;
VH и KH - скорость и курс корабля-носителя, поступающие соответственно на четвертый и пятый входы вычислителя 14.
Курс К и скорость V цели рассчитываются по формулам:


где VP - радиальная составляющая скорости цели, поступающая на третий вход вычислителя 14.
Параметры К и V поступают соответственно на первый и второй выходы вычислителя 14 и в дальнейшем могут быть использованы для классификации цели.
Из уравнений (1)÷(4) нетрудно видеть, что точность измерения параметров К и V движения цели в значительной степени определяется точностью измерения пеленга П цели. В системе-прототипе этот параметр определяется в режиме щумопеленгования, то есть точность его измерения определяется значением ПГ и далее никак не уточняется.
В предлагаемой системе гидролокации значение пеленга цели определяется в два этапа. На первом этапе, как и в системе-прототипе, определяется грубое значение ПГ пеленга. Однако в дальнейшем оно уточняется с помощью блока 9 и устройства 4. В результате в заявленной системе значение ПТ пеленга определяется с существенно большей точностью, чем в системе-прототипе. Следовательно, в заявленной системе и параметры К и V движения цели определяются с большей точностью, чем в системе-прототипе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ ОТ ШИРОКОПОЛОСНОЙ МИНЫ-ТОРПЕДЫ | 2012 |
|
RU2513880C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| СИСТЕМА АКТИВНОЙ ГИДРОЛОКАЦИИ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ | 2009 |
|
RU2393503C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ЦЕЛИ В РЕЖИМЕ АКТИВНОЙ ЛОКАЦИИ ГИДРОАКУСТИЧЕСКОГО ИЛИ РАДИОЛОКАЦИОННОГО КОМПЛЕКСА | 2003 |
|
RU2260197C2 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала | 2015 |
|
RU2615491C1 |
| УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ПОДВОДНОЙ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКОЙ | 2006 |
|
RU2309872C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |
Система гидролокации гидроакустической станции может быть использована в системах обнаружения подводных объектов и измерения их координат и других параметров движения. Основу предлагаемой системы составляют две ее части: тракт активной гидролокации и тракт шумопеленгования. Тракт активной гидролокации содержит последовательно включенные устройство 1 формирования зондирующего сигнала, генераторное устройство 2 и передающую антенну 3, последовательно включенные приемные антенное устройство 4, устройство 5 обработки эхо-сигналов цели и устройство 6 измерения радиальной составляющей скорости цели, устройство 7 измерения дальности до цели, блок 8 определения скорости изменения пеленга и блок 9 уточнения пеленга и управления положением антенн тракта. Тракт шумопеленгования содержит последовательно включенные приемное антенное устройство 10, устройство 11 обработки сигналов шумопеленгования и устройство 12 измерения пеленга. Техническим результатом изобретения является повышение точности определения параметров движения цели. 2 ил.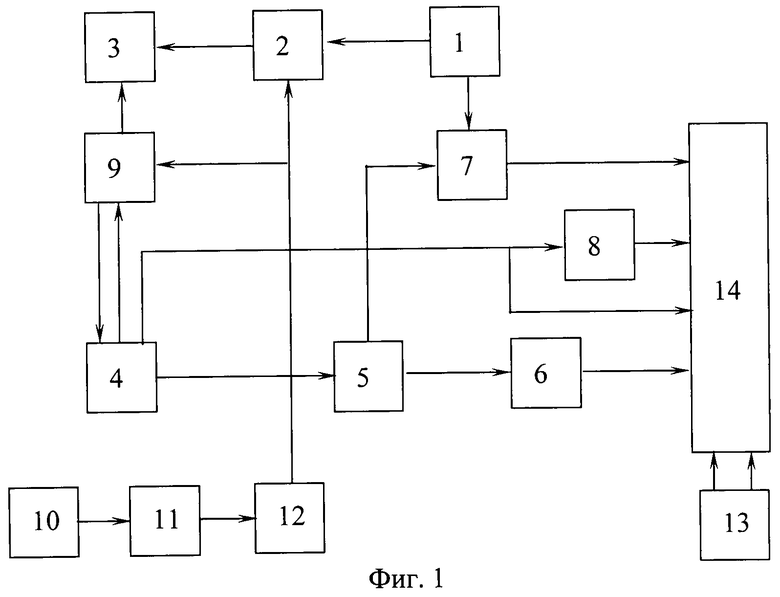
Система гидролокации гидроакустической станции, содержащая последовательно включенные устройство формирования зондирующего сигнала, генераторное устройство и передающую антенну, тракт шумопеленгования, содержащий последовательно включенные антенное устройство, устройство обработки сигналов шумопеленгования и устройство измерения пеленга, подключенное своим выходом ко второму входу генераторного устройства, последовательно включенные приемное антенное устройство тракта активной гидролокации, устройство обработки эхо-сигнала и устройство измерения радиальной составляющей скорости цели, блок определения скорости изменения пеленга, устройство измерения дистанции до цели, первый и второй входы которого подключены ко вторым выходам устройства обработки эхо-сигналов и устройства формирования зондирующего сигнала соответственно, блок связи с системами корабля-носителя и вычислитель, первый и второй входы которого подключены к выходам блока определения скорости изменения пеленга и устройства измерения дистанции до цели соответственно, третий вход - к выходу устройства измерения радиальной составляющей скорости цели, а четвертый и пятый входы - соответственно к первому и второму выходам блока связи с системами корабля-носителя, отличающаяся тем, что в нее введен блок уточнения пеленга и управления положением антенн, при этом антенны тракта активной гидролокации выполнены с возможностью управления положением в плоскости пеленгования, приемное антенное устройство тракта активной гидролокации выполнено на основе двух парциальных антенн, акустические оси которых развернуты в плоскости пеленгования на угол, примерно равный ширине основного лепестка характеристики направленности, второй выход приемного антенного устройства тракта активной гидролокации соединен с первым входом блока уточнения пеленга и управления положением антенн, третий выход - со входом блока определения скорости изменения пеленга и шестым входом вычислителя, а управляющий вход - со вторым управляющим выходом блока уточнения пеленга и управления положением антенн, второй вход которого подключен к выходу устройства измерения пеленга, а первый управляющий выход - к управляющему входу передающей антенны.
| СИСТЕМА АКТИВНОЙ ГИДРОЛОКАЦИИ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ | 2009 |
|
RU2393503C1 |
| УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ПОДВОДНОЙ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКОЙ | 2006 |
|
RU2309872C1 |
| ПРИЕМНЫЙ ТРАКТ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ С ЛИНЕЙНОЙ АНТЕННОЙ, УСТРАНЯЮЩИЙ НЕОДНОЗНАЧНОСТЬ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА СИГНАЛА | 2000 |
|
RU2190237C2 |
| Приспособление для удаления сердцевины из баклажана | 1930 |
|
SU20394A1 |
| US 5909409 A1, 01.06.1999 | |||
| US 5168473 A, 01.12.1992. | |||

