Изобретение относится к машине для дорожного строительства, в соответствии с преамбулой п.1, выравнивающему устройству, в соответствии с преамбулой по п.8 соответственно, и способу, в соответствии с преамбулой по п.13.
Известно, что в дорожные фрезерные станки встраивают выравнивающее устройство, посредством которого должно обеспечиваться производство ровной фрезерованной поверхности.
Система контроля глубины фрезерования разработана таким образом, что могут быть подсоединены различные датчики. Среди других, используемые датчики содержат, например, проводной датчик, ультразвуковой датчик и датчик уклона.
Проводной датчик расположен на боковых пластинах (защите режущей кромки) почти у фрезерного барабана и таким образом сканирует требуемую поверхность, в данном случае поверхность дороги, очень точно. Ультразвуковой датчик работает бесконтактным образом и, следовательно, не подвергается какому-либо механическому износу и истиранию. Он может быть использован многими способами и может быть прикреплен к машине в разных местах.
Если должен быть произведен определенный поперечный уклон, может быть использован также датчик уклона, который встроен в дорожную фрезерную машину.
Известная система контроля глубины фрезерования может быть снабжена двумя независимыми контурами управления. Контроллер обеспечивается в каждом контуре управления, к которому могут подсоединяться датчики посредством штекерных соединений. Например, обеспечиваются или два датчика высоты, или один датчик высоты в сочетании с одним датчиком уклона.
Для современного уровня техники нежелательно, чтобы частая смена между многими различными датчиками, которая необходима по причинам, связанным с применением, была невозможна без прерывания работы фрезерования и без негативного влияния на результат работы. Чтобы сменить текущий датчик, сначала должен быть изменен автоматический режим системы контроля, так как имеется только один контроллер или только один индикатор и задающее устройство, чтобы задавать значения, и фактические значения на контроллере соответственно. Таким образом, может быть выбран новый датчик, и требуемая заданная величина может быть установлена предварительно, тогда можно опять перейти на автоматический режим системы контроля. Если дорожный фрезерный станок продолжает фрезеровать во время смены датчика, то ошибки в результате работы могут возникнуть потому, что никакой контроль не действует в это время. Следовательно, станок должен быть остановлен для смены датчика, что ведет к значительной потере времени. Неблагоприятный эффект на результат работы оказывается, даже если дорожный фрезерный станок останавливается во время смены датчика, потому что фрезерный барабан режет четко, когда стоит. Это нежелательное воздействие, в частности, во время тонкого фрезерования.
Следовательно, задача изобретения заключается в создании машины для дорожного строительства, а также выравнивающего устройства и способа для управления глубиной фрезерования и/или уклоном фрезерования, в которых возможна смена датчика без какого-либо прерывания процесса фрезерования.
Упомянутая ранее задача достигается посредством признаков, указанных в п.1, п.8 и п.13.
Изобретение предлагает эффективный способ, когда индикаторное и задающее устройство для выравнивающего устройства дополнительно к индикатору и задающему блоку, обеспеченному, по меньшей мере, для одного датчика, используемого в настоящее время, снабжено дополнительным индикаторным и задающим блоком для выбираемого датчика, на который должен быть заменен датчик, используемый в настоящее время. Благодаря дополнительному индикатору и задающему блоку, достигается преимущество, заключающееся в том, что новый датчик, на который должен быть заменен датчик, используемый в настоящее время, может быть подготовлен для времени переключения со своими фактическими показателями и заданными значениями без прерывания процесса. Следовательно, во время переключения датчик может быть заменен без какого-либо изменения применяемых в настоящее время регулируемых величин. Выравнивающее устройство снабжено устройством для переключения датчиков, которые при включении команды переключения действуют на переключение выравнивающего устройства с, по крайней мере, одного используемого в настоящее время датчика на, по крайней мере, другой один предварительно выбранный датчик без прерывания процесса фрезерования и без какого-либо ошибочного изменения применяемых в настоящее время регулируемых величин для установки глубины фрезерования и/или для установки уклона фрезеровочного барабана.
Устройство для переключения с индикаторным и задающим устройством делает возможным предварительный выбор другого датчика и предварительную установку параметров процесса (заданные значения и фактические значения) другого предварительного выбранного датчика.
Таким образом, оператор станка может уже подготовить переключение датчиков во время процесса фрезерования таким образом, что переключение датчиков возможно по нажатию кнопки без какой-либо потери времени и без прерывания процесса фрезерования.
Для этого выравнивающее устройство обеспечено индикаторным и задающим устройством, которое способно обозначать и изменять данные используемого в настоящее время датчика и данные предварительно выбранного датчика. Посредством устройства переключения переключение между датчиком, используемым в настоящее время, и предварительно выбранным датчиком может происходить во время процесса фрезерования без какого-либо влияния на результат работы.
Один вариант осуществления изобретения обеспечивает то, что измеренные в настоящее время фактические значения глубины фрезерования и/или уклона фрезерного барабана, по крайней мере, одного предварительно выбранного другого датчика, могут быть заданы позднее, во время переключения на такое же последнее измеренное фактическое значение глубины фрезерования и/или уклона использованного перед этим датчика.
Следовательно, возможно при замене датчика использование фактического значения последнего использованного датчика так, что значение регулирования для задания глубины фрезерования и/или для задания уклона фрезерного барабана не изменяется при замене, причем равномерность фрезерованной дорожной поверхности не действует неблагоприятно при замене датчика. Альтернативный вариант осуществления обеспечивает то, что заданное значение для глубины фрезерования и/или для уклона фрезерного барабана может быть задано позднее, во время переключения на измеренную в настоящее время фактическую величину для глубины фрезерования, по крайней мере, одного предварительно выбранного датчика.
Выравнивание заданного значения до измеренной в настоящее время фактической величины предварительно выбранного датчика, который заменит предыдущий датчик, подтверждает, что никакого изменения регулируемого значения для задания глубины фрезерования и/или уклона не будет сделано во время переключения.
Третий вариант осуществления доказывает, что в случае отклонения измеренных фактических величин выбранных других датчиков из предварительно использованных датчиков, регулируемое значение для задания глубины фрезерования и/или задание уклона может быть изменено посредством предварительно задаваемой переходной функции.
Следовательно, согласно дополнительной альтернативе обеспечивается то, что в случае изменения регулируемого в настоящее время значения, происходящего при переключении датчиков, упомянутое изменение следует после предварительно задаваемой переходной функции, начиная с регулируемого значения «0». Таким образом, достигается то, что изменение регулируемого значения не происходит ошибочным образом, так что равномерность фрезеруемой дорожной поверхности не является неблагоприятным результатом и адаптация к регулируемому значению при переключении происходит на более длинной дистанции, например больше 10 метров или более.
Предпочтительно выравнивающее устройство снабжено двумя контроллерами, датчики которых расположены параллельно к оси вращения фрезерного барабана на поперечной дистанции один к другому, и которые предпочтительно управляют глубиной фрезерования независимо друг от друга по левую и правую стороны от машины.
Изобретение также относится к выравнивающему устройству с признаками по п.8.
Согласно способу управления глубиной фрезерования или уклоном фрезерования фрезерного барабана машины для дорожного строительства путем регистрации фактического действительного значения глубины фрезерования и/или уклона фрезерного барабана относительно базовой поверхности используя, по меньшей мере, один сменный или переключаемый датчик, в котором управление глубиной фрезерования и/или управление уклоном фрезерного барабана, обусловленное влиянием на предварительно определенные заданные значения и в настоящее время измеренные фактические значения во время процесса фрезерования, осуществляют путем возвращения регулируемого значения для достижения или поддержания заданного значения, это обеспечивается, чтобы при смене используемого в настоящее время датчика для предварительно выбранного другого датчика, управление глубиной фрезерования и/или уклоном происходило без прерывания процесса фрезерования заданием заданных значений и фактических значений датчика, предшествующего переключателю, посредством дополнительного индикатора и минимального шага таким образом, что регулируемые в настоящее время значения для задания глубины фрезерования и/или для задания уклона фрезерного барабана не изменяются ошибочным образом.
При включении команды переключения для переключения датчиков управление происходит без прерывания процесса фрезерования и без ошибочного изменения регулируемого в настоящее время значения для задания глубины фрезерования и/или для задания уклона фрезерного барабана.
Дорожная поверхность или определенная горизонтальная плоскость, предварительно определенная, например, лазером, или любая другая свободно определяемая предварительно выбранная поверхность может быть использована как базовая поверхность, которая может иметь различный уклон или градиент (положительный или отрицательный) вдоль дорожной поверхности.
Ниже варианты осуществления изобретения объяснены более подробно со ссылками на чертежи, на которых изображено:
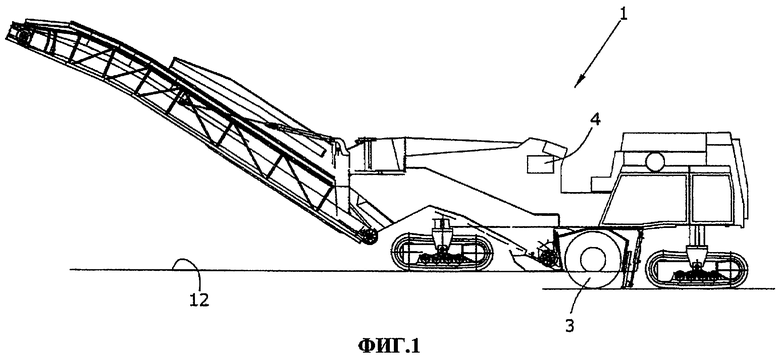
фиг.1 - машина для дорожного строительства;
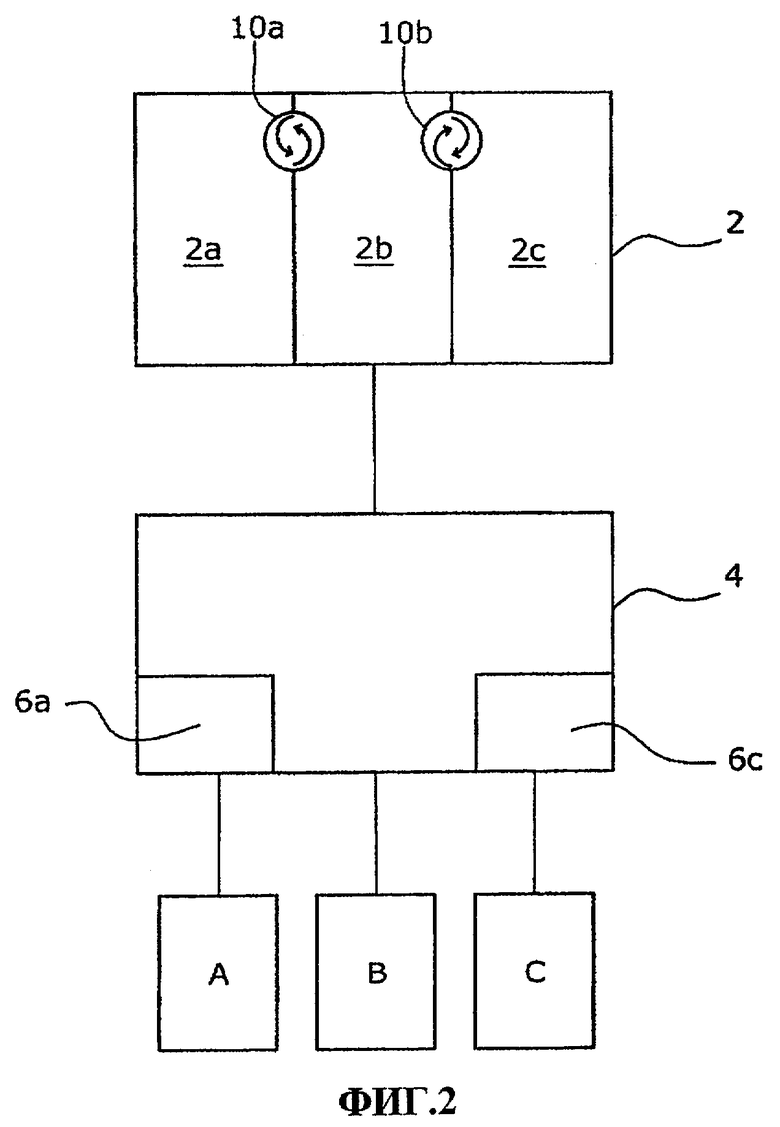
фиг.2 - выравнивающее устройство;
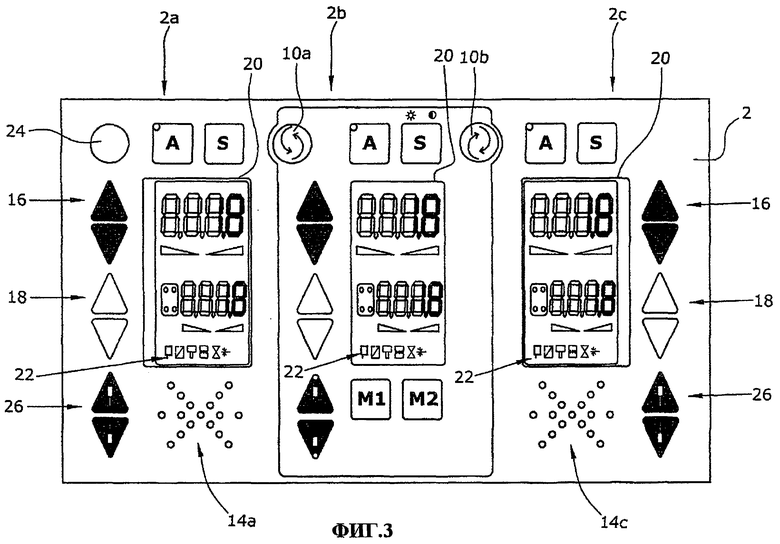
фиг.3 - индикаторное и задающее устройство;
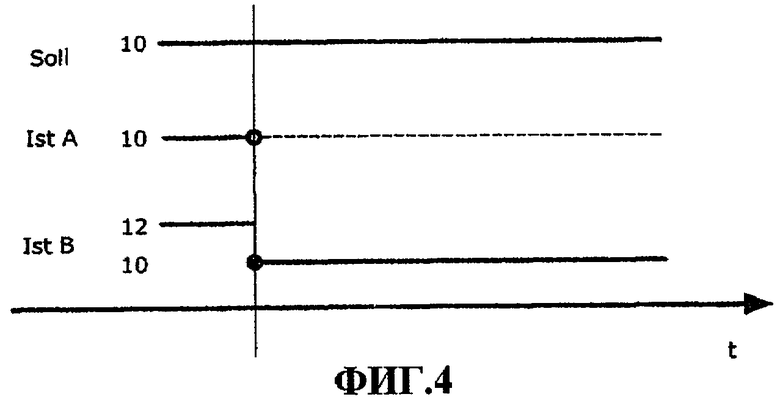
фиг.4 - совпадение фактических значений различных датчиков при переключении;
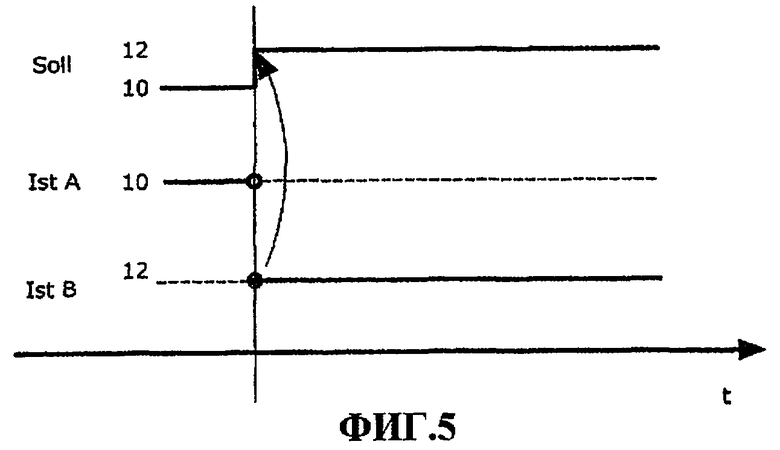
фиг.5 - совпадение заданного значения и фактического значения нового датчика при переключении;
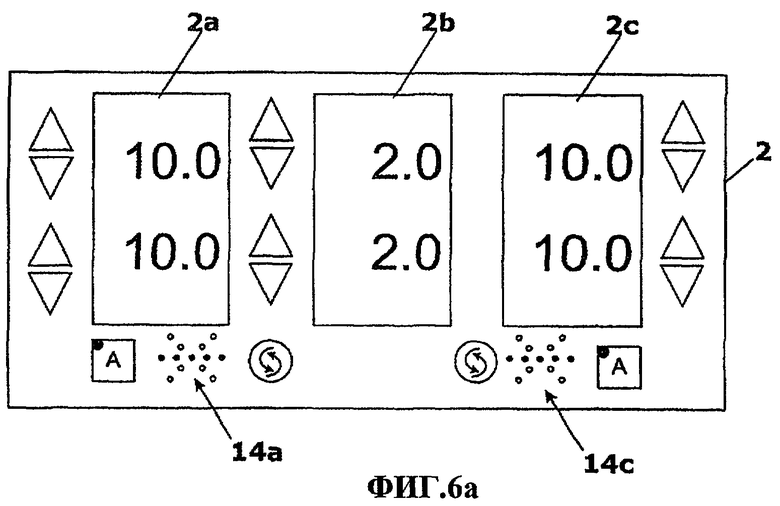
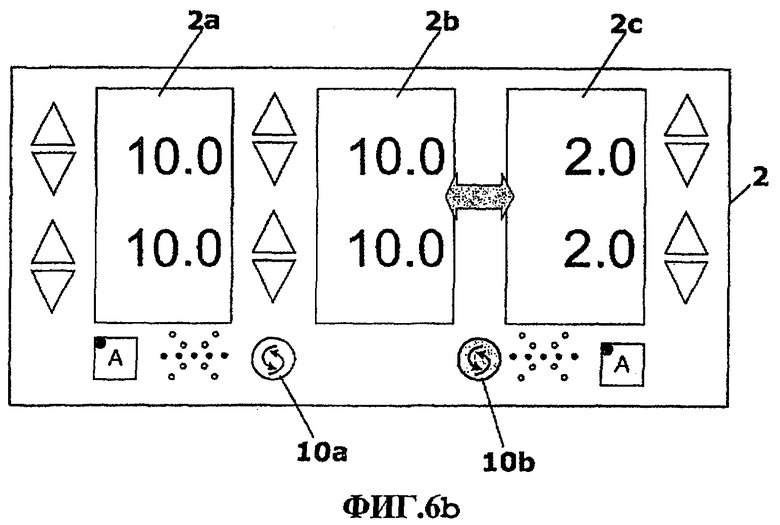
фиг.6а-6б - изменение управления глубиной фрезерования на управление уклоном фрезерования;
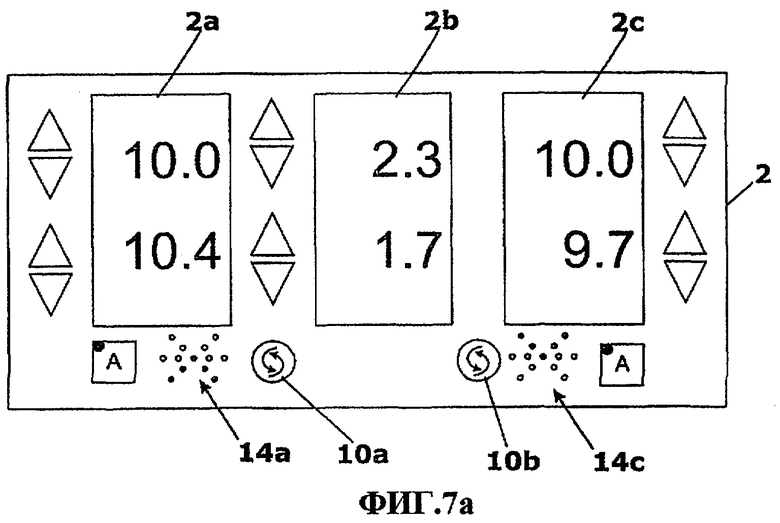
фиг.7а-7с - процедура переключения с совпадением заданных значений;
фиг.8а-8д - переключение с совпадением фактического и заданного значений.
На фиг.1 показана дорожная машина 1 для обработки дорожной поверхности с фрезерным барабаном 3, регулируемым по высоте с учетом глубины фрезерования. Передний подвижный приводной узел поддерживает себя сам, например дорожная поверхность 12, которая может служить как базовая поверхность для управления глубиной фрезерования или управления уклоном. Для этого дорожная машина 1 снабжена выравнивающим устройством 4с, по меньшей мере, одним контроллером 6а, 6с, который получает заданные значения для глубины фрезерования и/или уклона фрезерного барабана 3. Сменные датчики А, В, С могут быть подсоединены к контроллерам 6а, 6с выравнивающего устройства 4. Датчики А, В, С предназначены для регистрации фактических значений текущего времени глубины фрезерования и/или уклона фрезерного барабана 3 относительно базовой поверхности, которая может заключаться в дорожной поверхности 12, предварительно определенная горизонтальная плоскость или свободно определяемая, например математически предварительно определенная плоскость или поверхность. По меньшей мере, один контроллер 6а, 6с влияет на управление глубиной фрезерования и/или управление уклоном для фрезерного барабана 3, обусловленного предварительно заданным значением и измеренным в настоящее время фактическим значением, по меньшей мере, одного датчика А, В, С с регулируемым значением, которое вернут для достижения или поддержания заданного значения в процессе фрезерования. Как показано на фиг.2, выравнивающее устройство 4 снабжено индикаторным и задающим устройством, которое распределено на 3, по существу, одинаковых индикаторных и задающих блока 2а, 2б, 2с. Индикаторное и задающее устройство 2 предназначено для задания параметров процесса для датчиков А, В, С. Заданные значения и фактические значения датчиков А, В, С могут быть заданы в каждом индикаторном и задающем узле 2а, 2б, 2с. Индикаторные и задающие узлы 2а и 2с, правый и левый, каждый подсоединен к контроллеру 6а, 6с, который может быть включен посредством автоматической кнопки для получения соответствующего автоматического управления. Контроллеры остаются в автоматическом режиме во время переключения. Регулируемое значение контроллеров 6а, 6с как следствие от разницы заданного значения и фактического значения обозначается качественно стрелками 14 с индикаторным устройством, способным обозначить вертикальную скорость перемещения машины пропорционально, а также качественно. Предварительно заданные значения и фактические значения центрального индикаторного и задающего узла 2б, который объединен с выбираемым датчиком В для замены на используемый в настоящее время датчик А или С, мог быть замененным посредством устройства переключения 10а или 10б с заданных значений и фактических значений датчика А или С, чтобы быть замененным на выбранный другой датчик В.
В варианте осуществления показана версия, в которой один контроллер 6а, 6с обеспечен для каждой стороны дорожной строительной машины 1. Понятно, что индикаторное и задающее устройство 2 также может быть обеспечено только двумя индикаторными и задающими устройствами, если имеется только один контроллер, когда один датчик сменяется на другой выбираемый датчик.
Количество имеющихся индикаторных и задающих устройств поэтому всегда больше на один, чем количество используемых датчиков.
На фиг.2 показано подключение датчиков А, В, С к выравнивающему устройству 4 с двумя контроллерами 6а, 6с, где выравнивающее устройство обеспечивается индикаторным и задающим устройством 2 с тремя индикаторными и задающими устройствами 2а, 2б, 2с.
На фиг.3 показан вариант осуществления индикаторного и задающего устройства 2, когда задающие кнопки 16 (вверх и вниз) для задания задаваемых величин, также как задающие кнопки 18 (вверх и вниз) для регулирования измеренных фактических значений представлены для каждого индикаторного и задающего устройства 2а, 2б, 2с.
Регулируемые в настоящее время заданные значения и измеренные в настоящее время фактические значения датчиков А, В, С показываются на дисплее 20 индикаторных и задающих узлов 2а, 2б, 2с. Направление возможного задания уклона фрезерного барабана может также быть отображенным на дисплее 20. Кроме того, отображаются устройства, например, в дюймах или сантиметрах, или проценты в процентах относительно отображаемого значения.
Выбор датчиков отображается на нижнем краю 22 дисплея 20, позволяя оператору машины определять посредством индикатора в настоящее время, какой тип датчиков отображается в настоящее время на индикаторном и задающем узле 2а, 2б, 2с.
Символы представляют слева направо, проводной датчик, датчик уклона, ультразвуковой датчик, мультиплексный датчик, общая станция также, как лазер для предварительного определения образцовой поверхности.
Над дисплеем 20 расположена каждая отдельная кнопка для автоматического режима и для задающего режима для задания параметров управления. Рычаг 24 также, как кнопки 26 для регулирования высоты подвижного приводного устройства, может быть выполнен на индикаторном и задающем устройстве 2. Две кнопки памяти М1, М2 для запоминания заданных величин дополнительно расположены под дисплеем 20 на центральном индикаторном и задающем узле 2б.
Различные возможности того, как избежать ошибочного изменения регулируемого значения текущего времени, представлены на фиг.4-6.
В варианте осуществления по фиг.4 измеренные фактические значения текущего времени предварительно выбранного датчика В уравниваются с последними измеренными фактическими значениями текущего времени предварительно используемого датчика А во время переключения.
На фиг.5 предварительно выбранная заданная величина адаптируется к измеренному в настоящее время фактическому значению предварительно выбранного датчика В так, что также в этом случае не происходит изменения регулируемого значения.
В случае отклонения измеренных фактических значений предварительно использованного датчика А от предварительно выбранного датчика В, регулируемое значение может, как альтернатива вариантов осуществления фиг.4 и 5, также меняться в регулируемом значении, как результат из-за различий в фактических значениях посредством переходной функции. Следовательно, происходит временной переход, посредством которого может произойти ошибочное изменение регулируемой величины.
На фиг.6а и 6б показан процесс переключения в уравновешенном состоянии. На фиг.6а показано начальное состояние, в котором индикаторный и задающий узел 2с, который подключен к контроллеру 6с, должен быть переключен с режима процесса глубины фрезерования (заданное значение 10,0 см) на режим процесса уклона фрезерования (заданное значение 2%). Переключение происходит в уравновешенном состоянии. Это означает, что соответствующее фактическое значение на обеих сторонах машины соответствует заданному значению и, следовательно, регулируемое значение 0 на обеих сторонах. Уравновешенное состояние обозначается датчиком и задающим устройством 14а, 14с через перекладину. Как показано на фиг.6б, при включении кнопки переключения 10б устройства переключения 10 предварительно выбранные заданные значения и фактические значения сменяются с индикаторного и задающего узла 2б на индикаторный узел 2с, и берется как основа в непрерывном автоматическом режиме для смешанной глубины фрезерования и управления уклоном фрезерования.
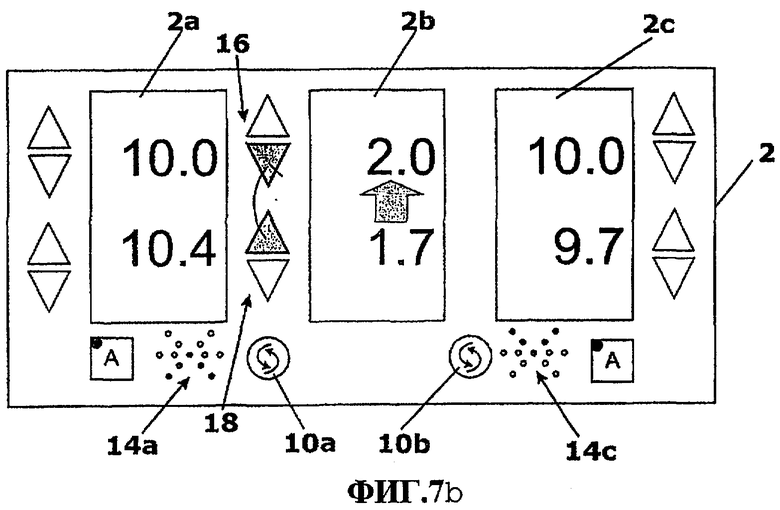
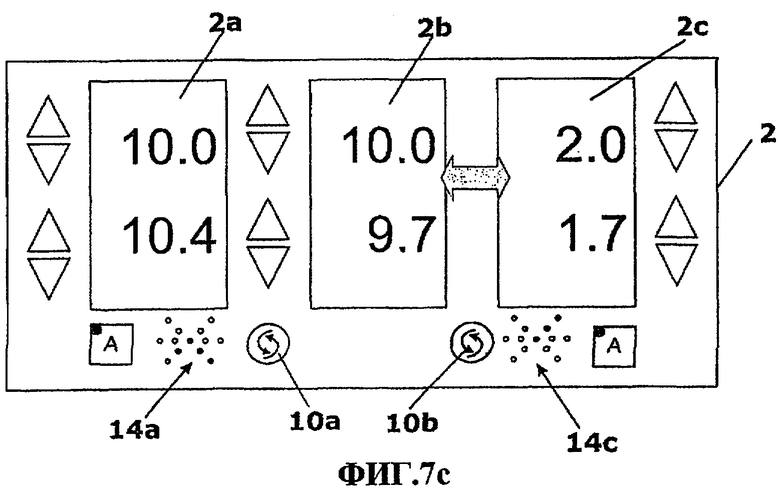
На фиг.7а-7с показан процесс переключения с совпадением заданных значений.
В этом примере регулируемые значения на обеих сторонах машины не равны 0. Индикаторный и задающий узел 2с контроллера 6с переключается с управления глубиной фрезерования на управление уклоном фрезерования. Заданное значение уклона адаптируется вручную на фиг.7б с помощью кнопок 16 так, что никаких ошибочных изменений регулируемого значения не произойдет. В этом примере принято, что регулируемое значение пропорционально отклонению управления (Р контроллер) и что фактор пропорциональности для глубины фрезерования и уклонов фрезерования равны численно. Отклонения управления составляют 0,3 см для глубины фрезерования (индикаторный и задающий узел 2с на фиг.7а) и 0,6% для уклона фрезерования (индикаторный и задающий узел 2б на фиг.7а) так, что регулируемое значение, следовательно, будет удвоено на основе значения после переключения. Для того чтобы совпасть с отклонением управления, заданное значение уклона уменьшено до 2,0, что приводит к равному числовому отклонению управления. Это может быть достигнуто вручную с помощью кнопки 16 «уменьшить заданное значение», или автоматически, например, с помощью комбинации кнопок 16, 18 «увеличить фактическое значение и снизить заданное значение» (фиг.7б).
Посредством включения кнопки переключения 10б, показанной на фиг.7с, заданное значение и фактическое значение уклона фрезерования обозначены стрелками. В этом процессе регулируемое значение остается неизменным.
Дополнительный вариант осуществления (не показан) может обеспечить автоматическое совпадение заданных значений. В таком варианте осуществления изменение заданных значений варианта осуществления по фиг.7а-7с, упомянутых ранее, осуществляют автоматически, когда кнопка переключения 10б (или 10а) включается в автоматическом режиме. Первый этап ручного изменения значений в центральном индикаторном и задающем узле 2б (фиг.7) может обходиться без этого, как если бы происходил автоматически.
Дополнительный, непоказанный вариант состоит в изменении, в случае отклонения фактических значений, регулируемого значения посредством предварительно заданной переходной функции, начиная с регулируемого значения текущего времени.
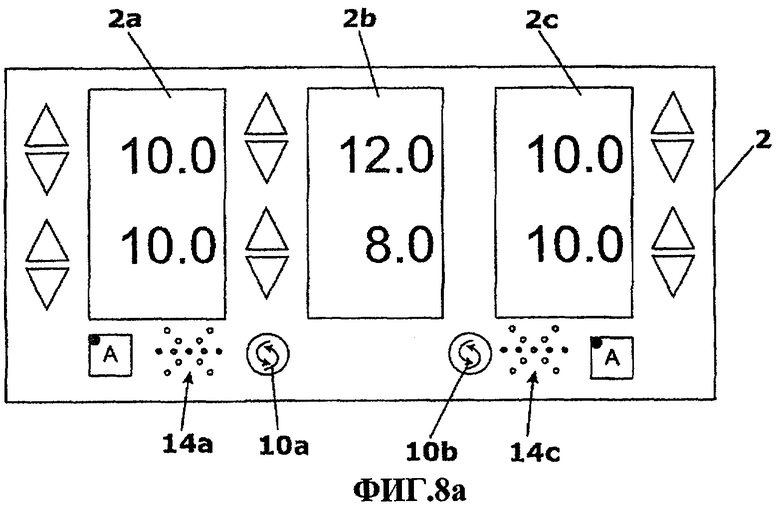
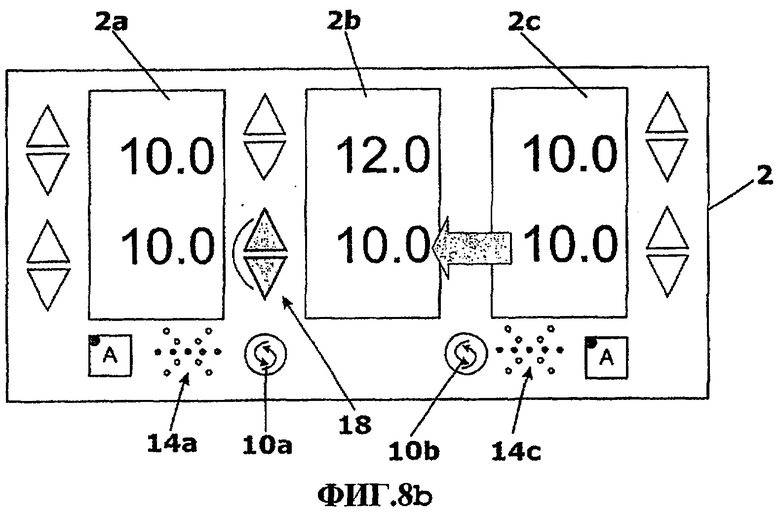
На фиг.8а и 8б показан вариант осуществления с совпадением фактических значений и заданных значений.
В начальной ситуации, показанной на фиг.8а, указаны, относительно контроллера 6с на правой стороне, значения глубины фрезерования датчика С, например проводного датчика, смонтированного на защитной режущей кромке, в то время как центральный индикаторный и задающий узел 2б обозначает значения глубины фрезерования датчика В, например ультразвукового датчика с точкой сканирования впереди фрезерного барабана. Датчик глубины фрезерования С должен быть заменен датчиком глубины фрезерования В, где заданные значения и фактические значения двух датчиков В, С не совпадают. Тем не менее, регулируемые значения текущего времени равны 0, как следует из устройства обозначения 14а, 14с.
Поскольку датчик В регулируется различно, его фактические значения не совпадают с фактическими значениями датчика С. Они могут быть равны фактическим значениям датчика А посредством кнопок задания фактических значений 18 или вручную, или автоматически, например удерживая две кнопки задания фактического значения 18 нажатыми в течение продолжительного периода времени.
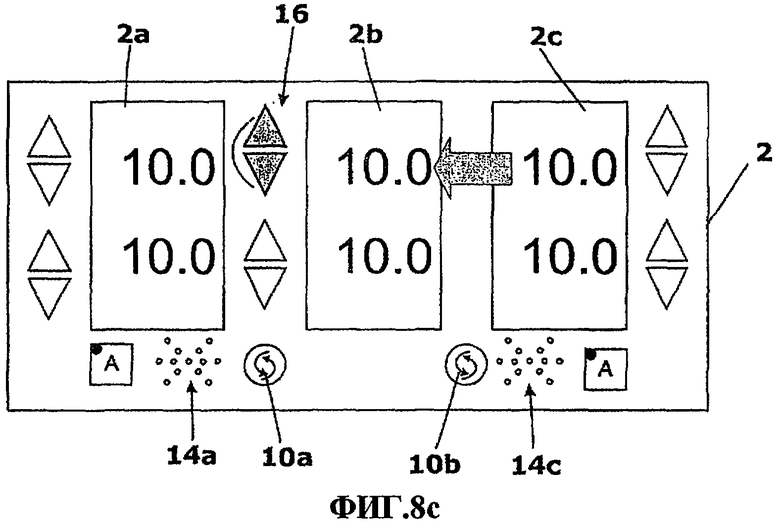
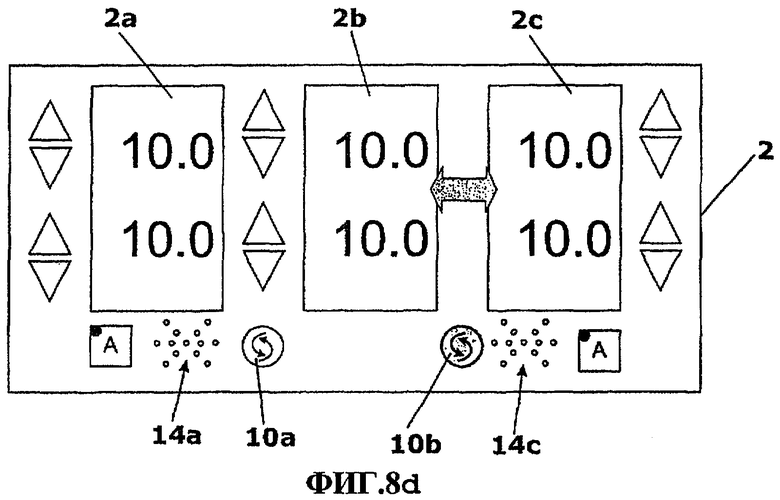
На фиг.8с и 8д показаны совпадающие процедуры заданных значений. Так как заданное значение двух датчиков В, С относится к глубине фрезерования справа, заданное значение датчика В должно быть адаптировано к заданному значению датчика С. Это может быть осуществлено посредством заданного значения кнопок задания или автоматически, например, удержанием двух кнопок задания заданных значений нажатыми в течение продолжительного периода времени.
Осуществляют последующее включение правой кнопки переключения 10б, заданное значение и фактическое значение датчика В. Регулируемое значение остается 0 и, таким образом, не изменяется.
Все варианты осуществления обозначают заданные значения и фактические значения предварительно выбранного датчика В, который должен быть заменен на ранее использованный датчик С, в индикаторном и задающем узле 2б. Возможно, таким образом, предварительно задавать требуемые значения (задаваемые и фактические значения) для предварительно выбираемого датчика В и адаптировать их для ранее используемого датчика А, С или их заданных значений или фактических значений, соответственно, даже важнее ввести команду переключения посредством кнопок переключения 10а или 10б. При включении кнопки переключения 10а устройства переключения 10 предварительно выбранный датчик заменяется датчиком А, который в текущее время используется на левой стороне машины для дорожного строительства 1.
Как уже было объяснено ранее в соответствии с вариантом осуществления по фиг.7, несмотря на результат выравнивания заданных значений вручную, выравнивание заданных значений может также быть осуществлено автоматически, когда происходит включение кнопки переключения 10б (или 10а) в автоматическом режиме.
Машина для дорожного строительства, выравнивающее устройство, а также способ управления глубиной фрезерования или уклоном фрезерования. В машине для дорожного строительства для обработки дорожных поверхностей с фрезерным барабаном, регулируемым по высоте относительно глубины фрезерования, с выравнивающим устройством с, по меньшей мере, одним контроллером, который получает заданные значения для глубины фрезерования и/или уклона фрезерного барабана, и с, по меньшей мере, одним сменным датчиком или с несколькими переключаемыми датчиками для регистрирования фактических значений настоящего времени глубины фрезерования и/или уклона фрезерного барабана относительно образцовой поверхностью. Контроллер выполнен с возможностью управления глубиной фрезерования и/или управления уклоном фрезерного барабана, обусловленного предварительно определенным заданным значением и измеренными фактическими значениями настоящего времени, по меньшей мере, одного датчика путем возвращения регулируемого значения для достижения или поддержания заданного значения во время процесса фрезерования, причем выравнивающее устройство обеспечено индикаторным и задающим устройством для обозначения и задания параметров процесса для, по меньшей мере, одного датчика. Индикаторное и задающее устройства выравнивающего устройства дополнительно к индикатору и задающему устройству, обеспеченному для, по меньшей мере, одного датчика, используемого в настоящее время, снабжено добавочным индикаторным и задающим устройством для выбираемого датчика, на который должен быть заменен используемый в настоящее время датчик. 3 н. и 16 з.п. ф-лы, 8 ил.
1. Машина для дорожного строительства (1) для обработки дорожной поверхности, содержащая фрезерный барабан (3), регулируемый по высоте относительно глубины фрезерования, выравнивающее устройство (4) с, по меньшей мере, одним контроллером (6а, 6с), который получает заданные значения для глубины фрезерования и/или уклона фрезерного барабана (3), и, по меньшей мере, один сменный датчик (А, В, С) или несколько переключаемых датчиков для регистрации фактического значения текущего времени для глубины фрезерования и/или уклона фрезерного барабана (3) относительно базовой поверхности, в которой контроллер (6а, 6с) выполнен с возможностью управления глубиной фрезерования и/или управления уклоном фрезерного барабана (3), обусловленной предварительно заданным значением и измеренными фактическими значениями текущего времени, по меньшей мере, одного датчика (А, В, С) путем возвращения регулируемого значения для достижения или поддержания заданного значения во время процесса фрезерования, причем выравнивающее устройство (4) снабжено индикаторным и задающим устройством (2) для обозначения и процесса задания параметров для, по меньшей мере, одного датчика (А, В, С), отличающаяся тем, что индикаторное и задающее устройство (2) для выравнивающего устройства (4) дополнительно к индикаторному и задающему блоку (2а, 2с), обеспеченному для, по меньшей мере, одного используемого датчика (А, С), снабжено добавочным индикаторным и задающим блоком (26) для выбираемого датчика (В), на который должен быть сменен датчик (А, С), используемый в настоящее время.
2. Машина для дорожного строительства по п.1, отличающаяся тем, что выравнивающее устройство (4) снабжено устройством (10) для переключения датчиков (А, В, С) которые при включении команды переключения осуществляют переключение выравнивающего устройства (4) с, по меньшей мере, одного датчика настоящего времени (А, С) на, по меньшей мере, один предварительно выбранный другой датчик (В) без прерывания процесса фрезерования и без каких-либо ошибочных изменений заданного значения настоящего времени для задания глубины фрезерования и/или для задания уклона фрезерного барабана.
3. Машина для дорожного строительства по п.2, отличающаяся тем, что измеренное фактическое действительное значение глубины фрезерования и/или уклона фрезерного барабана (3), по меньшей мере, одного выбранного другого датчика (В) может быть задано самое позднее во время переключения на то же последнее измеренное фактическое значение для глубины фрезерования и/или для уклона ранее использованного датчика (А, С).
4. Машина для дорожного строительства по п.2, отличающаяся там, что заданное значение глубины фрезерования и/или уклона фрезерного барабана (3) может быть задано самое позднее во время переключения на измеренное в настоящее время фактическое значение глубины фрезерования, по меньшей мере, одного выбранного датчика (В).
5. Машина для дорожного строительства по п.2, отличающаяся тем, что в случае отклонения измеренных фактических значений выбранного другого датчика (В) для ранее используемого датчика (А, С) регулируемое значение для задания глубины фрезерования и/или задания уклона может быть изменено посредством предварительно заданной переходной функции.
6. Машина для дорожного строительства по п.2, отличающаяся тем, что устройство переключения снабжено индикаторным и задающим устройством (2), которое осуществляет предварительный выбор другого датчика (В) и предварительное задание параметров процесса другого датчика (В).
7. Машина для дорожного строительства по п.2, отличающаяся тем, что выравнивающее устройство (4) снабжено двумя контроллерами (6а, 6с), датчиками (А, С), расположенными параллельно оси вращения фрезерного барабана (3) напротив друг друга и выполненными с возможностью управления глубиной фрезерования независимо друг от друга на левой и правой сторонах машины (1).
8. Машина для дорожного строительства по п.1, отличающаяся тем, что базовая поверхность является дорожной поверхностью (12).
9. Машина для дорожного строительства по п.1, отличающаяся тем, что базовая поверхность является горизонтальной плоскостью.
10. Машина для дорожного строительства по п.1, отличающаяся тем, что базовая поверхность является свободно определяемой предварительно выбранной поверхностью.
11. Выравнивающее устройство (4) для регулируемого по высоте фрезерного барабана (3) машины для дорожного строительства (1) по п.1, содержащее, по меньшей мере, один контроллер (6а, 6с), который получает запоминаемые заданные значения для глубины фрезерования и/или уклона фрезерного барабана (3), и, по меньшей мере, один сменный датчик (А, В, С) или несколько переключаемых датчиков (А, В, С) для регистрации фактического значения настоящего времени глубины фрезерования и/или уклона фрезерного барабана (3) относительно выбранной базовой поверхности, в котором контроллер (6а, 6с) выполнен с возможностью управления глубиной фрезерования и/или управления уклоном для фрезерного барабана (3), обусловленного предварительно заданными значениями и измеренными в настоящее время фактическими значениями, посредством возвращения регулируемого значения для достижения или поддержания заданного значения для глубины фрезерования и/или уклона фрезерования во время процесса фрезерования, при этом выравнивающее устройство (4) снабжено индикаторным и задающим устройством (2) для задания параметров процесса для, по меньшей мере, одного датчика (А, В, С), отличающееся тем, что индикаторное устройство (2) выравнивающего устройства (4) дополнительно к индикаторному и задающему блоку (2а, 2с), обеспеченному для, по меньшей мере, одного датчика (А, С) используемого в текущее время, снабжено добавочным индикатором и задающим блоком (26) для выбираемого датчика (В), на который должен быть сменен датчик (А, С), используемый в настоящее время.
12. Выравнивающее устройство по п.11, отличающееся тем, что содержит устройство (10) для переключения датчиков (А, В, С), которое при включении команды переключения осуществляет переключение датчика (А, В, С) с, по меньшей мере, одного датчика настоящего времени (А, С) на, по меньшей мере, один предварительно выбранный другой датчик (В) без прерывания процесса фрезерования и без какого-либо ошибочного изменения регулируемого значения настоящего времени для задания глубины фрезерования и/или задания уклона.
13. Устройство по п.11, отличающееся тем, что базовая поверхность является дорожной поверхностью (12).
14. Устройство по п.11, отличающееся тем, что базовая поверхность является горизонтальной плоскостью.
15. Устройство по п.или 11, отличающееся тем, что базовая поверхность является свободно определяемой предварительно выбранной поверхностью.
16. Способ управления глубиной фрезерования или уклоном фрезерования фрезерного барабана (3) машины для дорожного строительства (1), при котором регистрируют фактическое значение текущего времени глубины фрезерования и/или уклона фрезерного барабана (3) относительно базовой поверхности путем использования, по меньшей мере, одного сменного или переключаемого датчика (А, В, С), в котором управление глубиной фрезерования и/или управление уклоном для фрезерного барабана (3), обусловленное предварительно определенным заданным значением и измеренными фактическими значениями настоящего времени во время процесса фрезерования, осуществляют путем возвращения регулируемого значения для достижения или поддержания заданного значения, отличающийся тем, что при замене используемого в настоящее время датчика (А, С) на предварительно выбранный другой датчик (В) управление глубиной фрезерования и/или уклоном осуществляют без прерывания процесса фрезерования путем задания заданных значений и фактических значений датчика (В) посредством дополнительного индикаторного и задающего блока (26) до переключения таким образом, что регулируемое значение настоящего времени для задания глубины фрезерования и/или для задания уклона фрезерного барабана (3) не изменяется ошибочным образом.
17. Способ по п.16, отличающийся тем, что при переключении с последнего используемого датчика (А, С) на предварительно выбранный другой датчик (В), фактическое значение настоящего времени другого датчика (В) задают такое же, как последнее измеренное фактическое значение последнего использованного датчика (А, С).
18. Способ по п.16, отличающийся тем, что при переключении последнего используемого датчика (А, С) на предварительно выбранный другой датчик (В), предварительно заданное значение настоящего времени задают как фактическое значение другого датчика (В).
19. Способ по п.16, отличающийся тем, что при переключении последнего используемого датчика (А, С) на предварительно выбранный другой датчик (В) в случае отклонения фактических значений другого выбранного датчика (В) с ранее использованного датчика (А, С) измеренное заданное значение настоящего времени изменяют посредством предварительно заданной переходной функции, начиная с регулируемого значения текущего времени во время переключения на регулируемое значение, полученное в результате разницы в заданных значениях.
| Способ обработки нежестких деталей | 1984 |
|
SU1154075A1 |
| US 5984420 А, 16.11.1999 | |||
| DE 9204614 U1, 02.07.1992 | |||
| Устройство управления машиной для регенерирования и уплотнения асфальтобетонных покрытий | 1989 |
|
SU1620523A1 |
| Машина для регенерирования и уплотнения асфальтобетонных покрытий | 1985 |
|
SU1288241A1 |

