Изобретение относится к автоматизации рабочих процессов машин для ремонта асфальтобетонных покрытий, а именно к системам управления взламывающим рабочим органом машин для регенерирования и уплотнения асфальтобетонных покрытий.
Цель изобретения - повышение качества управления и производительное- ти машины.
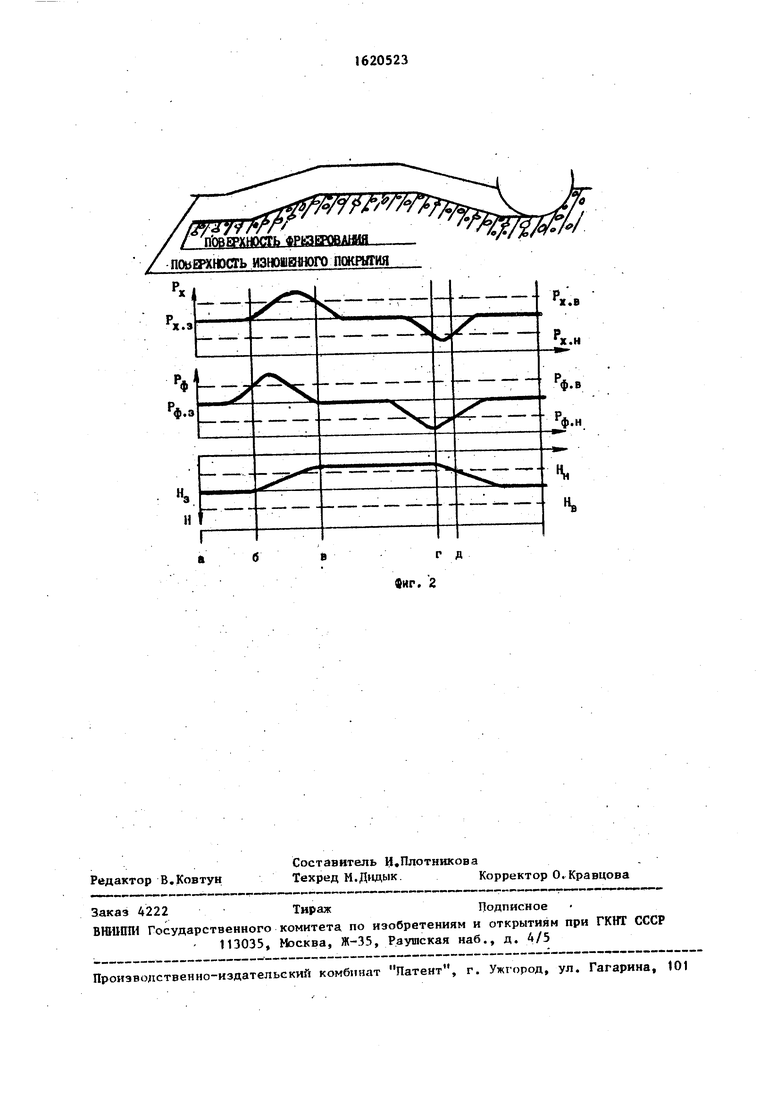
На фиг,1 изображена структурная схема устройства управления; на фиг.2 графики изменения стабилизируемых параметров, иллюстрирующие работу уст- ройства на примере прохождения гребня волны на поверхности покрытия. Устройство управления машиной состоит из двух каналов управления левой 1 и правой 2 секциями рабочего органа 3 (шнек-фреза или рыхлитель), каждый из которых содержит контур 4 стабилизации взламывающего рабочего органа 3, включающий датчик 5 и задатчик 6 уровня, выходы которых соединены с входами элемента сравнения 7, на выходе которого установлен пороговый элемент 8, контур 9 стабилизации крутящего момента на шнек-фрезе, включающий датчик 10 и задатчик 11 давления в напорной гидролинии 12 гидропривода 43 соответствующей секции, выходы которых соединены с входами элемента сравнения 14, на выходе которого установ- лен пороговый элемент 45, общий для каналов 1 и 2 контур 16 стабилизации тягового усилия, включающий датчик 17 и задатчик 18 давления в напорной линии 19 гидропривода 20 хода, выхо- ды которых соединены с входами элемента сравнения 21, на выходе которого установлен пороговый элемент 22. Кроме того, устройство управления включает гидроцилиндры 23 подъема-опуска- ния взламывающего рабочего органа 3, управляемые посредством электрогидрораспределителей 24, электромагниты которых 25, управляющие подъемом рабочего органа 3, соединены с выхода- ми пороговых элементов 8, 15, 22, соответствующих превышению значений стабилизируемых параметров над заданными (Н Н, (f, Рц Рхр
а электромагниты 26, управляпщие опусканием рабочего органа 3, соединены с выходом порогового элемента 8 соответствующего превышению заданног уровня заглубления над измеренным
(Н 4. Нл), через последовательно установленные замыкающие контакты 27 и
28промежуточных релейных элементов
29и 30, обмотки 31 и 32 которых установлены на выходах пороговых элементов 15 и 22, соответствующих превышению заданных параметров над измеряемыми (Рйр , РХ4.РХЗ).
Устройство управления работает следующим образом.
С помощью задатчиков 6, 11, 18 устанавливают требуемые по условиям технологического процесса значения уровня заглубления Н взламывающего рабочего органа 3 и давлений в гидроприводах шнек-фрезы Ря и хода Рх . Непрерывный аналоговый сигнал с датчиков 5, 10, 17, имеющих электрический выход, поступает на один из входов соответствующего элемента сравнения 7, 14, 21, на второй вход которого поступает сигнал с соответствующего задагчика 6, 1, 16. На выходах элементов сравнения 7, 14, 21 формируется сигнал, соответствующий разности сигналов с задатчиков 7, 14, 21 и соответствующих датчиков 5, 10, 17, который подается на входы пороговых элементов 8, 15, 22, которые с учетом зоны нечувствительности вырабатывают сигнал, направленный на ликвидацию рассогласования.
В случае, когда все стабилизируемые параметры Н, Pq, Px находятся в заданном диапазоне (участок а-б на фиг.2), сигнал на выходах пороговых элементов 8, 15, 22отсутствует,электромагниты 25, 26 обесточены, обеспечивая нейтральную позицию золотников гидрораспределителей 24 и удержание рабочего органа 3 в заданном положении. I
При появлении источника перегрузки (прохождение гребня волны, непрогретого участка покрытия) возникает рост давления в гидролиниях 12 и 19 приводов 13 и 20 одновременно или в одной из них, который фиксируется датчиками 10, 17. При достижении сигналами рассогласования величин, соотв тствующих верхнему порогу Pe.t элемента 15 или верхнему порогу элемента 22 (участок б-в), запитыва- ется электромагнит 25 гидрораспреде- лителя 24, который обеспечивает вьг- глубление рабочего- органа 3, приводящее к снижению нагрузки.
При достижении сигналами рассогласования значений, лежащих в пределах зон нечувствительности пороговых элементов 15, 22, электромагнит 23 обесточивается, удерживая рабочий орган 3 в заданном положении, определяемом величиной действующей перегрузки участок().
По окончании участка, вызывающего перегрузку, давления в гидролиниях 12 и 19 снижается. При достижении сигналами рассогласования величин, соответствующих нижнему порогу Р- „ элемента 15 и нижнему порогу элемента 22, запитываются обмотки 31 и 32, срабатывают контакты 27 и 28, замыкая цепь между выходом порогового элемента 8 и электромагнитом 26 гидрораспределителя 24. Если при этом сигнал рассогласования в контуре 4 стабилизации положения рабочего органа 3 меньше нижнего порога Нн элемента 8 (выглубленный рабочий орган), то через контакты 27 и 28 запитывает- ся электромагнит 26 гидрораспределителя 24 и взламывающий рабочий орган 3 заглубляется до заданного положения (участок г-д).
Устройство управления позволяет повысить ровность укладываемого покрытия. Следствием этого является экономия времени и материалов, затраченных при доведении до требований строительных норм дефектных участков, возникающих в результате колебательных перемещений рабочего органа. Кроме того, отсутствие колебательного режима работы позволяет снизить динамические нагрузки в гидроприводах шнек- фрезы и хода, что повышает их долговечность. Наличие задатчиков в устройстве управления позволяет изменить
режим работы без остановки машины, повышая ее производительность.
0
0
Формула изобретения Устройство управления машиной для регенерирования и уплотнения асфальтобетонных покрытий, имеющей взламывающий рабочий орган, гидропривод хода, гидрораспределители с электромагнитами и с гидроцилиндрами подъема- опускания и гидроприводы соответственно левой и правой секций взламывающего рабочего органа, содержащее датчик давления гидропривода хода, датчики давления гидроприводов секций взламывающего рабочего органа и датчики уровня секций взламывающего рабочего органа, отличающееся тем, что, с целью повышения качества управления и производительности машины, оно снабжено по числу датчиков элементами сравнения с задатчиками, пороговыми элементами
5 и двумя промежуточными релейными элементами в каждой секции, причем датчики давления и уровня подключены к соответствующим входам элементов сравнения, выходы которых соединены соответственно с входами пороговых элементов, первые выходы которых подключены к одним электромагнитам гидро- распределителей секций взламывающего рабочего органа, к другим электро5 магнитам гидрораспределителей секций подключены через соответствующие замыкающие контакты промежуточных релейных элементов вторые выходы одних пороговых элементов, вторые выхо-
0 ДЬ| других пороговых элементов подключены к входам соответствующих промежуточных релейных элементов секций взламывающего рабочего органа.
wy/w/я
ПОВЕРХНОСТЬ ФРЕЗЕРОВАНИЯ
ПОВЕРХНОСТЬ ИЗНОШЕННОГО ПОКРУТИЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для регенерирования и уплотнения асфальтобетонных покрытий | 1985 |
|
SU1288241A1 |
| Электрогидравлическая система управления насосной установкой | 1986 |
|
SU1418505A1 |
| Устройство для автоматического управления грузовой лебедкой трубоукладчика | 1988 |
|
SU1652289A1 |
| Система управления рабочим органом планировочной машины | 1981 |
|
SU977621A1 |
| Система автоматического управления землеройной машины | 1987 |
|
SU1509489A1 |
| Гидропривод землеройной машины | 1989 |
|
SU1661304A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| Машина для регенерирования и уплотнения асфальтобетонных покрытий | 1987 |
|
SU1472553A1 |
| Устройство стабилизации угла наклона рабочего органа планировочной машины | 1984 |
|
SU1167279A1 |
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
Изобретение относится к автоматизации рабочих процессов машин для ремонта асфальтобетонных покрытий и позволяет повысить качество управ12 13 10 19 ления и производительность машины. Устройство содержит взламывающий рабочий орган 3, датчик 5 и задатчик 6 уровня взламывающего рабочего органа, датчик 10 и задатчик II давления в напорной гидролинии 12 гидропривода 13 соответствующей секции взламывающего рабочего органа, датчик 17 и задатчик 18 давления в напорной гид- рол инин 19 гидропривода 20 хода, гидрораспределители 24 с электромагнитами 25, 26, гидроцилиндры 23 подъема- опускания секций взламывающего рабочего органа, элементы сравнения 7, I 14, 21, пороговые элементы 8, 15, 22, замыкающие контакты 27, 28 и обмотки 31, 32 промежуточных релейных элементов 29, 30, 2 ил. (/)
V Рф.э
з
г
а
гф.в
г д
Фиг. 2
| Машина для регенерирования и уплотнения асфальтобетонных покрытий | 1985 |
|
SU1288241A1 |
