Изобретение относится к электроприводам, в частности к способам частотного регулирования электромагнитного момента асинхронного двигателя.
Известен способ управления электромагнитным моментом асинхронного двигателя по закону U/f=const (Ключев В.И. Теория электропривода: Учебник для вузов - М.: "Энергоатомиздат", 1985 г., с.357-361), основанный на использовании положительной обратной связи по частоте вращения асинхронного двигателя, предусматривающий установку требуемого задания электромагнитного момента, измерение частоты вращения и последовательное вычисление заданной электрической частоты напряжения статора и заданной амплитуды напряжения статора, затем осуществляют вычисление заданных величин напряжения статора в каждой фазе и исходя из заданных величин напряжения статора в каждой фазе, с помощью автономного инвертора напряжения управляют двигателем. Для выполнения этого способа необходимо иметь асинхронный двигатель, автономный инвертор напряжения, управляющее устройство и датчик скорости.
Недостатком известного технического решения является низкое быстродействие и низкие энергетические показатели регулирования.
Наиболее близким техническим решением того же назначения к предлагаемому является способ векторного управления электромагнитным моментом асинхронного двигателя (Панкратов В.В. Векторное управление асинхронными электроприводами: Учеб. пособие. - Новосибирск: Изд-во НГТУ, 1999 г., с.43-46). Этот способ управления включает установку требуемого задания электромагнитного момента и потокосцепления ротора и последовательное вычисление сначала составляющих вектора заданного напряжения статора в двухфазной неподвижной системе координат, затем заданных величин напряжения статора в каждой фазе, и управление асинхронным двигателем путем изменения составляющих вектора напряжения статора.
Недостатком известного технического решения является низкое быстродействие регулирования электромагнитного момента, необходимость предварительного намагничивания магнитопровода асинхронного двигателя и недостаточно высокие для ряда задач энергетические показатели регулирования.
Задачей предлагаемого изобретения является повышение быстродействия и энергетических показателей регулирования электромагнитного момента асинхронного двигателя.
Технический результат заявляемого изобретения выражается в повышении быстродействия управления электромагнитным моментом, уменьшении потерь в стали двигателя и уменьшении омических потерь при управлении электромагнитным моментом.
Указанный технический результат достигается тем, что в способе управления электромагнитным моментом асинхронного двигателя, включающем установку требуемого задания электромагнитного момента и последовательное вычисление сначала составляющих вектора заданного напряжения статора в двухфазной неподвижной системе координат, затем заданных величин напряжения статора в каждой фазе, и управление асинхронным двигателем, путем изменения составляющих вектора напряжения статора, согласно изобретению предварительно устанавливают требуемое задание потокосцепления статора, задают начальные значения составляющих вектора заданного напряжения статора в двухфазной неподвижной системе координат и выбирают весовые коэффициенты составляющих закона управления, затем измеряют токи статора в каждой фазе, после чего из токов статора в каждой фазе вычисляют составляющие вектора тока статора в двухфазной неподвижной системе координат, а из составляющих вектора тока статора и заданного напряжения статора в двухфазной неподвижной системе координат оценивают составляющие векторов потокосцепления статора и потокосцепления ротора в двухфазной неподвижной системе координат, из составляющих векторов потокосцепления статора и потокосцепления ротора в двухфазной неподвижной системе координат вычисляют электромагнитный момент, затем сравнивают электромагнитный момент с заданным электромагнитным моментом и получают первую составляющую закона управления, из составляющих вектора потокосцепления статора в двухфазной неподвижной системе координат вычисляют квадрат амплитуды потокосцепления статора, затем сравнивают квадрат амплитуды потокосцепления статора с заданным потокосцеплением статора, возведенным в квадрат, и получают вторую составляющую закона управления, из составляющих вектора тока статора в двухфазной неподвижной системе координат вычисляют квадрат амплитуды тока статора и получают третью составляющую закона управления, после чего из трех составляющих закона управления, представленных в пропорциях согласно соответствующим весовым коэффициентам, и составляющих вектора тока статора, потокосцепления статора и потокосцепления ротора в двухфазной неподвижной системе координат вычисляют составляющие вектора заданного напряжения статора в двухфазной неподвижной системе координат.
Таким образом, возможность устанавливать требуемое задание потокосцепления статора и наличие третьей составляющей закона управления, зависящей от тока статора, позволяет обеспечить высокие энергетические показатели регулирования, а наличие трех отдельных составляющих в законе управления и использование их в пропорциях, согласно соответствующим весовым коэффициентам, позволяет повысить быстродействие управления электромагнитным моментом асинхронного двигателя.
Изобретение поясняется чертежом, где показана структурная схема способа управления электромагнитным моментом асинхронного двигателя.
Заявляемый способ управления электромагнитным моментом асинхронного двигателя осуществляется следующим образом. Для управления электромагнитным моментом асинхронного двигателя 1 в соответствии с установленными требуемыми значениями заданного электромагнитного момента Мз и заданного потокосцепления статора ψ1з, при начальных значениях составляющих вектора заданного напряжения статора в двухфазной неподвижной системе координат и выбранных весовых коэффициентов составляющих закона управления, осуществляют измерение токов статора в каждой фазе с помощью датчиков тока 2. Из измеренных токов статора в каждой фазе в блоке 3 вычисляют составляющие вектора тока статора в двухфазной неподвижной системе координат в соответствии с зависимостями:
где i1α, i1β - составляющие вектора тока статора в неподвижной двухфазной системе координат (αβ);
i1a, i1b, i1с - токи статора в фазах α, b и с соответственно.
Из составляющих вектора тока статора и заданного напряжения статора в двухфазной неподвижной системе координат в блоке 4 оценивают составляющие векторов потокосцепления статора и потокосцепления ротора в двухфазной неподвижной системе координат в соответствии с зависимостями:
где U1α, U1β - составляющие вектора заданного напряжения статора в двухфазной неподвижной системе координат (αβ);
ψ1α, ψ1β - составляющие вектора потокосцепления статора в двухфазной неподвижной системе координат (αβ);
ψ2α, ψ2β - составляющие вектора потокосцепления ротора в двухфазной неподвижной системе координат (αβ);
R1 - активное сопротивление статора;
L1, L2 - индуктивность обмотки статора и ротора соответственно;
Lm - взаимная индуктивность обмоток статора и ротора;
T1=L1/R1 - постоянная времени статора;
σ'=1-(L /L1L2) - индуктивность рассеяния.
/L1L2) - индуктивность рассеяния.
Из составляющих векторов потокосцепления статора и потокосцепления ротора в двухфазной неподвижной системе координат в блоке 5 вычисляют электромагнитный момент в соответствии с зависимостью:
где коэффициент электромагнитной связи ротора -
 =L1+k2L2 - индуктивность рассеяния обмотки статора.
=L1+k2L2 - индуктивность рассеяния обмотки статора.
Вычисленный электромагнитный момент сравнивают с заданным электромагнитным моментом и получают первую составляющую закона управления: М-Мз.
Из составляющих вектора потокосцепления статора в двухфазной неподвижной системе координат в блоке 6 вычисляют квадрат амплитуды потокосцепления статора в соответствии с зависимостью:
Вычисленный квадрат амплитуды потокосцепления статора сравнивают с заданным потокосцеплением статора, возведенным в квадрат, и получают вторую составляющую закона управления: 
Из составляющих вектора тока статора в двухфазной неподвижной системе координат в блоке 7 вычисляют квадрат амплитуды тока статора и получают третью составляющую закона управления: 
После определения трех составляющих закона управления, на основании полученных величин, представленных в пропорциях согласно соответствующим весовым коэффициентам, и составляющих вектора тока статора, потокосцепления статора и потокосцепления ротора в двухфазной неподвижной системе координат в блоке 8 вычисляют составляющие вектора заданного напряжения статора в двухфазной неподвижной системе координат согласно зависимостям:


где h11, h22, h33 - весовые коэффициенты.
Из составляющих вектора заданного напряжения статора в двухфазной неподвижной системе координат в блоке 9 вычисляют заданные величины напряжения статора в каждой фазе согласно зависимостям:
где ua, ub, uc - заданные напряжения для фаз a, b и с соответственно.
Управление асинхронным двигателем 1 осуществляют с помощью автономного инвертора напряжения 10 путем изменения величины напряжения статора в каждой фазе, исходя из вычисленных заданных значений.
Поддержание требуемого значения заданного потокосцепления статора предотвращает насыщение магнитопровода асинхронного двигателя, вследствие чего устраняются потери энергии, связанные с этим явлением. Помимо этого, при изменениях момента нагрузки на валу асинхронного двигателя потокосцепление статора практически не отклоняется от заданного значения, вследствие чего также снижаются потери энергии. Снижение квадрата тока статора приводит к снижению омических потерь энергии в обмотке статора. Таким образом, за счет снижения суммарных потерь энергии обеспечиваются высокие энергетические показатели регулирования.
Сравнение заданного значения электромагнитного момента с вычисленным электромагнитным моментом и вычисление на основании результата сравнения заданных величин напряжения статора в каждой фазе без использования регуляторов стандартной конструкции позволяет осуществлять управление электромагнитным моментом с максимальным быстродействием.
Применение весовых коэффициентов позволяет определить долю участия каждой из трех составляющих закона управления в заданных величинах напряжения статора в каждой фазе. Следовательно, при увеличении доли участия первой составляющей закона управления быстродействие управления электромагнитным моментом дополнительно повышается.
Примером применения предлагаемого способа может служить управление электромагнитным моментом асинхронного двигателя в электроприводе подачи бурового станка с целью обеспечения постоянного усилия. Для этого необходимо предварительно задать начальные значения составляющих вектора заданного напряжения статора в двухфазной неподвижной системе координат u1α=0,1 и u1β=0,1 и выбрать весовые коэффициенты исходя из мощности асинхронного двигателя 1. После этого необходимо определить требуемое задание электромагнитного момента исходя из значения обеспечиваемого усилия и требуемое задание потокосцепления статора.
С помощью датчиков тока 2 осуществляют измерение токов статора в каждой фазе. Полученные токи необходимо подвергнуть аналого-цифровому преобразованию, так как последующие операции производятся в цифровой форме в виде программы управляющего микропроцессорного контроллера (на чертеже не показано), например типа DSP56F803.
Из измеренных токов статора в каждой фазе в блоке 3 вычисляют составляющие вектора тока статора в двухфазной неподвижной системе координат, а из составляющих вектора тока статора и заданного напряжения статора в двухфазной неподвижной системе координат в блоке 4 оценивают составляющие векторов потокосцепления статора и потокосцепления ротора в двухфазной неподвижной системе координат.
Из составляющих векторов потокосцепления статора и потокосцепления ротора в двухфазной неподвижной системе координат в блоке 5 вычисляют электромагнитный момент, а вычисленный электромагнитный момент сравнивают с заданным электромагнитным моментом и получают первую составляющую закона управления.
Из составляющих вектора потокосцепления статора в двухфазной неподвижной системе координат в блоке 6 вычисляют квадрат амплитуды потокосцепления статора, а вычисленный квадрат амплитуды потокосцепления статора сравнивают с заданным потокосцеплением статора, возведенным в квадрат, и получают вторую составляющую закона управления.
Из составляющих вектора тока статора в двухфазной неподвижной системе координат в блоке 7 вычисляют квадрат амплитуды тока статора и получают третью составляющую закона управления.
После определения трех составляющих закона управления, на основании полученных величин, представленных в пропорциях согласно соответствующим весовым коэффициентам, и составляющих вектора тока статора, потокосцепления статора и потокосцепления ротора в двухфазной неподвижной системе координат в блоке 8 вычисляют составляющие вектора заданного напряжения статора в двухфазной неподвижной системе координат, а из составляющих вектора заданного напряжения статора в двухфазной неподвижной системе координат в блоке 9 вычисляют заданные величины напряжения статора в каждой фазе.
На основании заданных величин напряжения статора в каждой фазе управляющим микропроцессорным контроллером аппаратно формируются импульсы управления автономным инвертором напряжения 10, а автономный инвертор напряжения, в свою очередь, управляет асинхронным двигателем 1.
Таким образом, заявляемый способ позволяет достичь раздельного управления электромагнитным моментом и потокосцеплением статора асинхронного двигателя, а также снижения квадрата тока статора с возможностью определения доли участия каждой из трех составляющих закона управления в заданных величинах напряжения статора в каждой фазе, что обеспечивает высокое быстродействие управления электромагнитным моментом и высокие энергетические показатели.
Изобретение относится к области электротехники и может быть использовано в электроприводах для частотного регулирования электромагнитного момента асинхронного двигателя. Технический результат заключается в повышении быстродействия управления электромагнитным моментом, уменьшении потерь в стали двигателя и уменьшении омических потерь при управлении электромагнитным моментом. В способе управления электромагнитным моментом асинхронного двигателя устанавливают требуемое задание потокосцепления статора, задают необходимые начальные значения и выбирают весовые коэффициенты составляющих закона управления, измеряют токи статора в каждой фазе и из измеренных значений вычисляют составляющие вектора тока статора в двухфазной неподвижной системе координат. По составляющим векторам тока статора и заданного напряжения статора в двухфазной неподвижной системе координат оценивают составляющие векторов потокосцепления статора и потокосцепления ротора в указанной системе координат. Вычисляют электромагнитный момент и квадрат амплитуды потокосцепления статора, сравнивают с соответствующими заданными величинами и получают первую и вторую составляющие закона управления. По составляющим вектора тока статора в двухфазной неподвижной системе координат вычисляют квадрат амплитуды тока статора, получая третью составляющую закона управления. По трем составляющим закона управления, представленным в пропорциях согласно соответствующим весовым коэффициентам, и измеренным и оцененным величинам вычисляют составляющие вектора заданного напряжения статора в двухфазной неподвижной системе координат. 1 ил.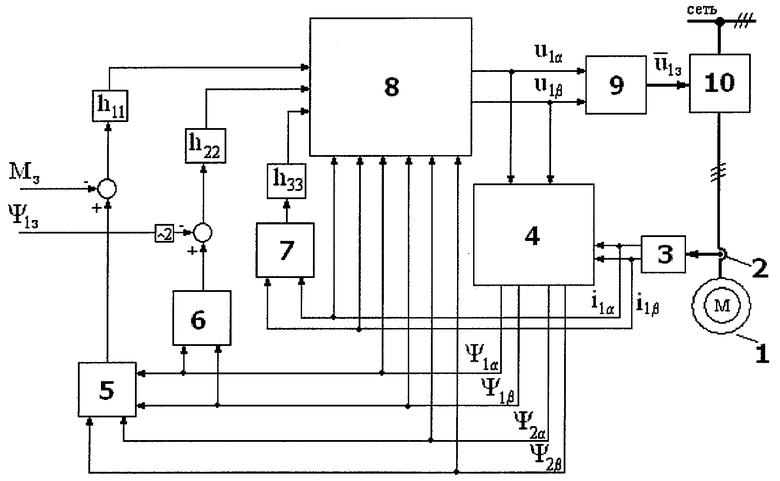
Способ управления электромагнитным моментом асинхронного двигателя, включающий установку требуемого задания электромагнитного момента и последовательное вычисление сначала составляющих вектора заданного напряжения статора в двухфазной неподвижной системе координат, затем заданных величин напряжения статора в каждой фазе, и управление асинхронным двигателем путем изменения составляющих вектора напряжения статора, отличающийся тем, что предварительно устанавливают требуемое задание потокосцепления статора, задают начальные значения составляющих вектора заданного напряжения статора в двухфазной неподвижной системе координат и выбирают весовые коэффициенты составляющих закона управления, затем измеряют токи статора в каждой фазе, после чего из токов статора в каждой фазе вычисляют составляющие вектора тока статора в двухфазной неподвижной системе координат, а из составляющих вектора тока статора и заданного напряжения статора в двухфазной неподвижной системе координат оценивают составляющие векторов потокосцепления статора и потокосцепления ротора в двухфазной неподвижной системе координат, из составляющих векторов потокосцепления статора и потокосцепления ротора в двухфазной неподвижной системе координат вычисляют электромагнитный момент, затем сравнивают электромагнитный момент с заданным электромагнитным моментом и получают первую составляющую закона управления, из составляющих вектора потокосцепления статора в двухфазной неподвижной системе координат вычисляют квадрат амплитуды потокосцепления статора, затем сравнивают квадрат амплитуды потокосцепления статора с заданным потокосцеплением статора, возведенным в квадрат, и получают вторую составляющую вектора закона управления, из составляющих вектора тока статора в двухфазной неподвижной системе координат вычисляют квадрат амплитуды тока статора и получают третью составляющую закона управления, после чего из трех составляющих закона управления, представленных в пропорциях согласно соответствующим весовым коэффициентам, и составляющих векторов тока статора, потокосцепления статора и потокосцепления ротора в двухфазной неподвижной системе координат вычисляют составляющие вектора заданного напряжения статора в двухфазной неподвижной системе координат.
| ПАНКРАТОВ В.В | |||
| Векторное управление электромагнитным моментом асинхронного двигателя: Учебное пособие | |||
| - Новосибирск: Новосибирский государственный технический университет, 1999, с.43-46 | |||
| RU 2132110 С1, 20.06.1994 | |||
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| Устройство для управления асинхронным двигателем | 1976 |
|
SU657559A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1399882A1 |
| Водоналивная перемычка для гашения ударной воздушной волны | 1986 |
|
SU1404657A1 |
| US 4447787 A1, 08.05.1984 | |||
| DE 3744905 A1, 10.10.1991 | |||
| Прибор для непрерывного измерения толщины масляной пленки в подшипнике скольжения | 1950 |
|
SU91589A1 |

