Изобретение относится к контрольно-измерительной технике мониторинга магистральных трубопроводов.
Известен универсальный диагностический снаряд-дефектоскоп для контроля за состоянием трубопроводов (патент RU 2111453, G 01 B 17/02, БИ 14, 1998), где введена секция навигационных и высотно-плановых отметок, представляющая собой герметичный корпус, внутри которого размещен навигационный модуль, включающий командный прибор с трехосным гиростабилизатором, цифровой вычислительный комплекс и блок регистрирующей аппаратуры. В этом техническом решении используется гиростабилизатор, точность которого снижается из-за интенсивных воздействий вибрации, ударов и отсутствия коррекции от других систем.
Известен подвижный вращающийся снаряд - топограф, применяемый для инспекции подземных трубопроводов изнутри (E.H.Knickmeyer, The Roling Pig or How does a Surveyor Greep Through a Pipeline. - Bulletin Geodesigue, 1994, 68, pp. 71-76). Снаряд содержит корпус, манжеты, одометры, блок чувствительных элементов, инерциальный блок в виде бесплатформенной инерциальной навигационной системы. Недостатком является то, что в указанной работе отсутствует магнитный экран инерциального блока и не указаны координаты расположения центра трех акселерометров, что не обеспечивает заданной точности позиционирования.
Известна инерциальная система мониторинга трубопроводов (патент США 4945775, МКИ G 01 C 9/06, 1990), содержащая герметичный корпус, манжеты, одометры, чувствительные элементы и приемники неинерциальной природы, модуль в виде бесплатформенной инерциальной навигационной системы, бортовой компьютер. Недостатком этой системы также является отсутствие магнитного экрана инерциального блока и координат расположения центра трех акселерометров, что не обеспечивает заданной точности позиционирования.
Наиболее близким аналогом предлагаемого изобретения является "Устройство для определения и регистрации геометрических параметров трубопроводов" (патент RU 2102704, G 01 В 17/02, БИ 2, 1998).
Это устройство состоит из герметичного контейнера, выполненного со смещенным к боковой поверхности относительно продольной оси центром тяжести, эластичных манжет, жестко закрепленных в носовой и хвостовой частях герметичного контейнера, датчика пути, блока вычислений и управления, регистратора, измерительного модуля, включающего три ряда ультразвуковых измерителей угловой скорости и трехкомпонентный акселерометр. Устройство снабжено аккумуляторной батареей.
Недостатком этого технического решения является наличие погрешностей за счет неопределенного места установки и крепления к контейнеру трех акселерометров. За счет этого появляются погрешности от поворотных ускорений контейнера, от его вибрации, ударов, а также магнитных полей (напряженность их в магнитных проходных дефектоскопах достигает 2500 А/м).
Задачей данного изобретения является повышение точности работы навигационного модуля и всего навигационно-топографического внутритрубного инспектирующего снаряда (НТ ВИС) за счет уменьшения внешних воздействий от поворотных ускорений, вибрации и напряженности магнитного поля внутри снаряда.
Это достигается тем, что в навигационно-топографическом внутритрубном инспектирующем снаряде, включающем герметичный контейнер, эластичные манжеты в передней и задней частях контейнера, датчики пути, приборные узлы, закрепленные внутри корпуса, блок электроники для регистрации сигналов датчиков, аккумуляторные батареи и измерительный модуль, содержащий три ортогонально расположенных волоконно-оптических гироскопа и три ортогонально расположенных акселерометра, измерительный модуль установлен на внутренних гранях корпуса кубической формы и закрыт пермаллоевым кожухом с толщиной, обеспечивающей снижение величины напряженности магнитного поля снаряда до минимально допустимых значений для этих датчиков, причем одна грань корпуса перпендикулярна продольной оси снаряда, геометрический центр трех акселерометров совмещен с центром подвеса контейнера, а корпус измерительного модуля соединен средствами крепления с контейнером снаряда. Корпус измерительного модуля может быть соединен с контейнером средствами крепления через упругодемпфирующие элементы. Кроме того, средства крепления установлены на грани корпуса измерительного модуля, перпендикулярной продольной оси контейнера снаряда, а упругодемпфирующие элементы выполнены с жесткостью, соответствующей выражению:
(i=1, 2, 3),
где ωМ - частота собственных недемпфированных колебаний амортизированного измерительного модуля; VСН - среднее значение линейной скорости снаряда внутри трубы; LОПОР - расстояние между рядами передних и задних колес (манжет); ωВ - среднее значение диапазона частот вибраций снаряда, сi - коэффициенты жесткости вдоль соответствующих осей подвеса; m - масса измерительного модуля.
Технический результат, который может быть получен при реализации данного изобретения, - создание навигационно-топографического внутритрубного нспектирующего снаряда повышенной точности.
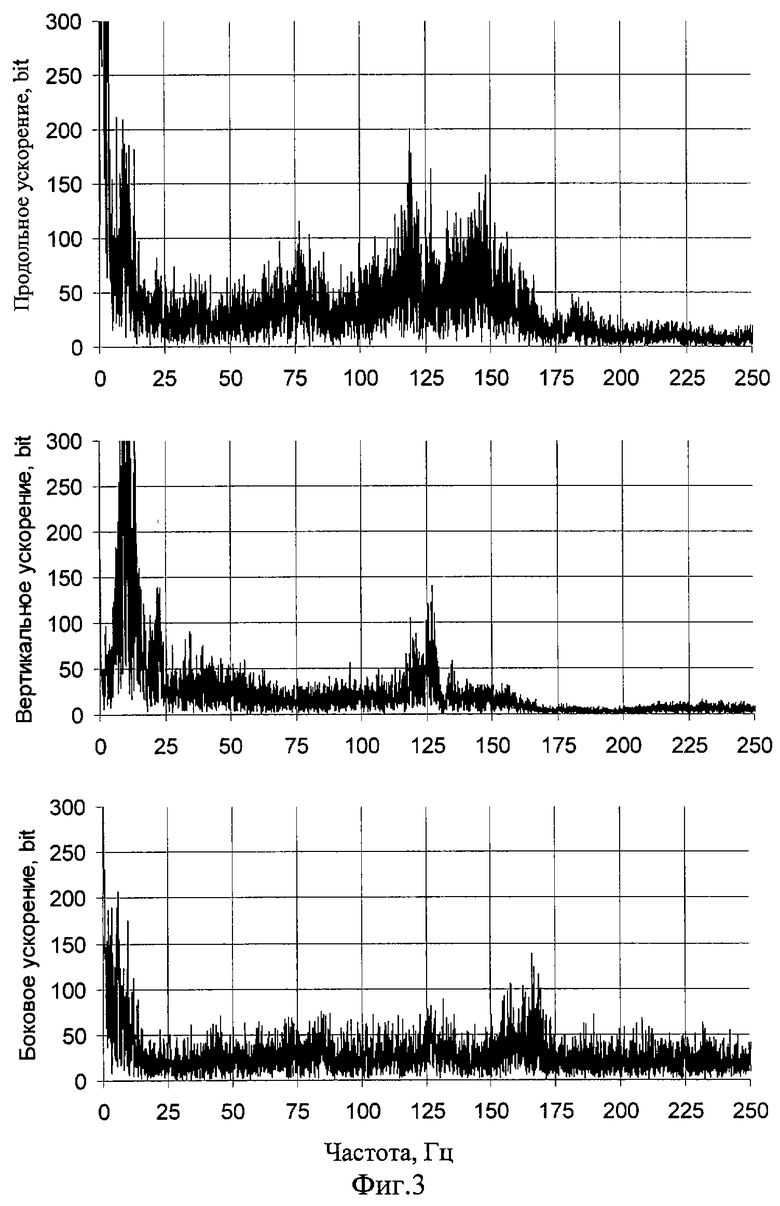
На фиг. 1 изображена схема навигационно-топографического внутритрубного инспектирующего снаряда (НТВИС), на фиг.2 - схема для определения центра подвеса снаряда, на фиг.3 представлен спектр вибраций опытного образца измерительного модуля на снаряде в трубе.
Навигационно-топографический внутритрубный инспектирующий снаряд состоит из герметичного контейнера 1, выполненного со смещением к боковой поверхности центра тяжести, эластичных манжет 2, жестко закрепленных в передней и задней частях контейнера, датчиков пути 3, приборного узла 4, блока электроники 5, аккумуляторных батарей 6 и измерительного модуля 7 в виде корпуса 8 измерительного модуля, трех волоконно-оптических гироскопов 9 и трех акселерометров 10, которые установлены на внутренних гранях кубического корпуса 8 измерительного модуля 7. Измерительный модуль 7 закрыт пермаллоевым кожухом 11 и установлен так, что геометрический центр трех акселерометров совпадает с центром подвеса снаряда, при этом одна грань кубического корпуса 8 измерительного модуля 7 перпендикулярна продольной оси контейнера, указанный корпус 8 соединен с контейнером 1 снаряда с помощью средств крепления 12 через три упругодемпфирующих опорных элемента 13; 14 - колеса, число которых в переднем и заднем рядах лежит в интервале 6-8 штук. Центр подвеса контейнера 1 определяется как точка "О" (см. фиг.2) пересечения прямых линий, соединяющих точки касания диагонально-противоположных колес 14' и 14', 14'' и 14'' соответственно как в вертикальной, так и горизонтальной плоскостях. Центр подвеса (НТВИС) и геометрический центр трех акселерометров необходимо совмещать, чтобы исключить в них погрешности от воздействия поворотных ускорителей [Бабаев А.А. Амортизация, демпфирование и стабилизация бортовых оптических приборов. Л.: Машиностроение. Ленингр. отд-ние, 1984, с. 24]. В снарядах, где колеса отсутствуют, центром подвеса является точка пересечения диагональных прямых, проходящих через центры опорных площадок манжет 2.
Устройство работает следующим образом. Подключается питание от аккумуляторных батарей 6 ко всем блокам и элементам снаряда. Снаряд помещается в камеру запуска и за счет перепада давления вводится в магистральный газопровод. Герметичный контейнер 1 начинает перемещаться на эластичных манжетах 2 относительно трубы, состоящей из сваренных отрезков. Это движение воспринимается датчиком пути 3, приборными узлами 4 и измерительным модулем 7. Магнитные поля от намагниченных участков трубы и дополнительных блоков намагничивания внутри снаряда ослабляются за счет введения пермаллоевого кожуха 11. По данным измерений магнитного поля дефектоскопа "КРОТ-1200" во внутреннем объеме снаряда в зоне 0-20 см от центра подвеса герметичного контейнера все компоненты поля не превышают 500 А/м (при Хз=50 см напряженность по этой оси достигает 1300 А/м). В то же время по данным фирмы "Физоптика" известно, что, например, у волоконно-оптических гироскопов ВГ-910 сдвиг нуля составляет 0,5-2o/ч/Гаусс, а у ВГ-951 - 0,2-1o/ч/Гаусс. Следовательно, толщина пермаллоевого экрана должна быть выбрана из условия снижения этой величины до уровня шумового дрейфа.
Так как эти же приборы могут работать в диапазоне вибрации с амплитудой 6g при частотах от 20 до 2000 Гц (ВГ-910) и 2g при частотах от 20 до 500 Гц (ВГ-951), то при наличии амортизации в виде упругодемпфирующих опорных элементов пространственного нагружения 13 для эффективной работы необходимо, чтобы частота собственных недемпфированных колебаний измерительного модуля 7 на опорных элементах 13 относительно контейнера 1 была минимум в  раз меньше, чем нижнее значение частоты диапазона существенных вибраций снаряда ("Гироскопические системы. Элементы гироскопических приборов". /Под ред. Д. С.Пельпора, М., Высшая школа, 1988, с. 416-425).
раз меньше, чем нижнее значение частоты диапазона существенных вибраций снаряда ("Гироскопические системы. Элементы гироскопических приборов". /Под ред. Д. С.Пельпора, М., Высшая школа, 1988, с. 416-425).
Нижнее значение частоты существенных вибраций снаряда может быть определено по частоте набегания снаряда на сварные швы из выражения
где Vсн - среднее значение линейной скорости снаряда внутри трубы;
LОПОР - расстояние между рядами колес (манжетами).
Частоты собственных колебаний амортизированного измерительного модуля 7 находятся из формулы
где Сi (i= 1, 2, 3) - значения жесткости упругодемпфирующих опорных элементов со средствами крепления вдоль трех осей системы координат, связанной с контейнером;
m - масса измерительного модуля 7.
Известно, что вибрации основания оказывают существенное влияние на точность гироскопов и акселерометров (С.Ф. Коновалов, Теория виброустойчивости акселерометров, М. , Машиностроение, 270 с.; П.К. Плотников, А.В. Фузеев. Влияние короткопериодических колебаний объекта на показания гиротахометра// Повышение надежности приборов, науч. тр. СПИ, вып. 23, Саратов "Коммунист", 1966, с. 69-77). Снижение этого влияния в данном техническом решении осуществляют путем применения амортизаторов со следующей рекомендацией по выбору частот собственных колебаний корпуса измерительного модуля на опорных элементах.
Данные частоты ωм должны лежать в интервале частот:
где Vсн - среднее значение скорости движения снаряда относительно трубы;
LОПОР - расстояние между передними и задними опорами снаряда;
ωМ - частота собственных колебаний измерительного модуля на опорных элементах;
ωВ - среднее значение частоты существенных вибраций снаряда по координатам поступательного движения.
При этом должно выполняться требование:
ωМ≅ωiC, (5)
(i=1, 2, 3),
где ωC - резонансная частота (частота среза) на амплитудно-частотной характеристике i-го акселерометра.
Результаты экспериментального исследования величин ускорений по трем координатам (фиг.3) показали, что среднее значение частоты вибрации НТ ВИС составило 100 Гц в продольном направлении, 80 Гц - в боковом и 125 Гц - в вертикальном. При рекомендуемой скорости снаряда в 1 м/с и расстоянии между опорами 1,25 м нижнее значение частот ωH = 8 Гц, а диапозон должен быть в пределах 2-80 Гц. Жесткость упругодемпфирующих элементов выбираем из соотношения (1).
Размещение акселерометров в центре подвеса снаряда снижает поворотное ускорение, обусловленное вращением движущегося снаряда, что повышает точность измерения ускорений контейнера 1 НТ ВИС.
Выполнение условий (1-4) с помощью вибропоглощающих прокладок 13, за счет подбора жесткости и коэффициента демпфирования обеспечивает ослабление действия вибрации и повышение точности работы модуля. При этом после извлечения снаряда из приемной камеры и переключения бортовой аппаратуры с долговременного запоминающего устройства к наземной системе повышается достоверность информации о координатах трассы и кинематических параметрах движения НТ ВИС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫСТАВКИ ОСЕЙ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2320963C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ УЧАСТКОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ С МАКСИМАЛЬНОЙ ДЕФОРМАЦИЕЙ | 2004 |
|
RU2272248C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| Способ измерения радиусов изгиба трубопровода на основе данных диагностического комплекса для определения положения трубопровода | 2017 |
|
RU2655614C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОДОЛЬНОГО ПРОФИЛЯ ЗАТОПЛЕННОГО ПОДЗЕМНОГО ТРУБОПРОВОДА | 2009 |
|
RU2406918C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ СМЕЩЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2001 |
|
RU2206871C2 |

Изобретение относится к измерительной технике, в частности к мониторингу магистральных трубопроводов. Технический результат: повышение точности работы навигационно-топографического внутритрубного инспектирующего снаряда за счет уменьшения внешних воздействий от поворотных ускорений, вибрации и напряженности магнитного поля внутри снаряда. Сущность: снаряд содержит герметичный контейнер, эластичные манжеты в передней и задней частях контейнера, датчики пути, приборные узлы, закрепленные внутри корпуса, блок электроники для регистрации сигналов датчиков, аккумуляторные батареи и измерительный модуль в виде корпуса кубической формы. На внутренних гранях корпуса установлены три волоконно-оптических гироскопа и три акселерометра с ортогональной взаимной ориентацией осей чувствительности. Модуль закрыт пермаллоевым кожухом с толщиной, обеспечивающей снижение величины напряженности магнитного поля снаряда до минимально допустимых значений для этих датчиков. Одна грань корпуса перпендикулярна продольной оси снаряда. Геометрический центр трех акселерометров совмещен с центром подвеса контейнера. Корпус измерительного модуля соединен средствами крепления с контейнером снаряда. Корпус модуля может быть соединен с контейнером средствами крепления через упругодемпфирующие элементы. Средства крепления установлены на грани корпуса измерительного модуля, перпендикулярной продольной оси контейнера снаряда. Упругодемпфирующие элементы выполнены с жесткостью, соответствующей выражению
(i=1, 2, 3)
где ωM - частота собственных недемпфированных колебаний амортизированного измерительного модуля; Vсн - среднее значение линейной скорости снаряда внутри трубы; LОПОР - расстояние между рядами передних и задних колес (манжет); ωB - среднее значение диапазона частот вибраций снаряда, сi - коэффициенты жесткости вдоль соответствующих осей подвеса; m - масса измерительного модуля. 2 з.п. ф-лы, 3 ил.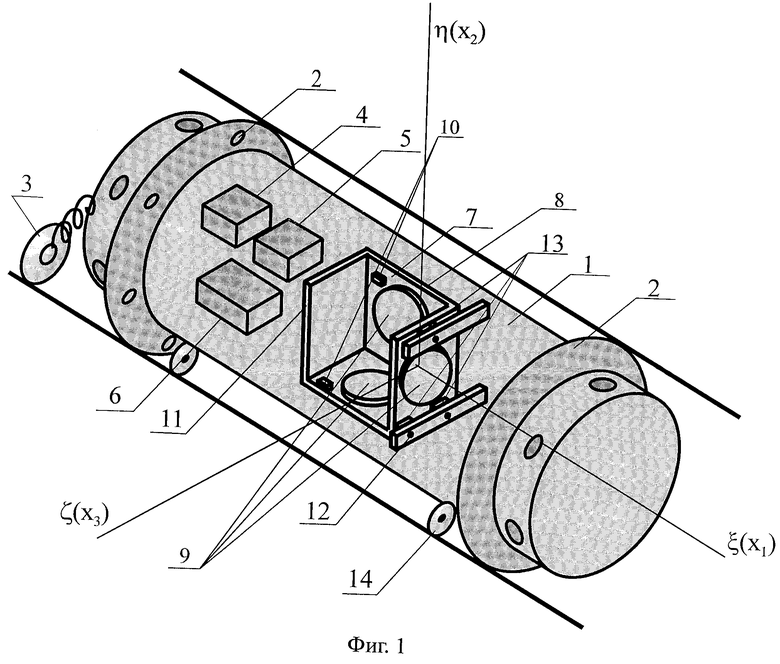
(i = 1, 2, 3)
где ωм - частота собственных недемпфированных колебаний амортизированного измерительного модуля;
Vсн - среднее значение линейной скорости снаряда внутри трубы;
LОПОР - расстояние между рядами передних и задних колес (манжет);
ωв - среднее значение диапазона частот вибраций снаряда;
сi - коэффициенты жесткости вдоль соответствующий осей подвеса;
m - масса измерительного модуля.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И РЕГИСТРАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРУБОПРОВОДОВ | 1994 |
|
RU2102704C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ, ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И НАПРЯЖЕННОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 1996 |
|
RU2106569C1 |
| АППАРАТУРА КОМЛ^УТАЦИИ ТЕЛЕГРАФНЫХ КАНАЛОВ | 0 |
|
SU336828A1 |
| НАТЯЖНОЕ И АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ГУСЕНИЧНЫХ ЦЕПЕЙ ТРАНСПОРТНЫХ СРЕДСТВ | 0 |
|
SU272073A1 |

