Область техники, к которой относится изобретение
Изобретение относится к авиационной технике, в частности к системам посадки беспилотных летательных аппаратов самолётного типа. Система может быть применена везде, где есть необходимость применения беспилотных летательных аппаратов для аэрофотосъемки и мониторинга или других задач, но нет возможности гарантировано и безопасно для окружающих посадить аппарат в автоматическом режиме обычным способом.
Уровень техники
Из уровня техники известен способ посадки беспилотного самолета на аэрофишер (RU 2399560, B64F 1/02 B64C 25/68), опубл.20.09.2010). Способ в котором используют приемный участок подвижного троса, натянутый через направляющие ролики горизонтально посредине между верхними концами двух балок, имеющих механическую связь нижними концами с основанием, а на принимаемом самолете захватывающая трос система расположена позади его центра тяжести. На посадочном режиме траекторию полета самолета формируют так, чтобы зацепление за приемный участок троса происходило при пролете или после пролета над этим участком, после чего выключают воздушный движитель и как можно интенсивнее тормозят самолет до заданной скорости, соблюдая при этом принятые для него ограничения по перегрузке и регулируя выпуск приемного троса. Для заданного диапазона скоростей захода на посадку в допустимых условиях эксплуатации конкретного типа самолета характеристики захватывающей трос системы длина, вес, несущие свойства и аэродинамическое сопротивление определены так, чтобы ширина заметаемой гибким поводком полосы захвата была не меньше точности управления по высоте траекторией полета этого типа самолета, у первого каскада аэрофинишера поддерживающие приемный участок троса балки (мачты) неподвижны относительно основания в процессе захода на посадку, а высота расположения приемного участка троса над прилегающей к аэрофинишеру поверхностью больше суммы номинального приращения высоты на заданном маневре перехода на пологое кабрирование и точности управления самолетом по высоте, причем второй каскад аэрофинишера размещают относительно первого каскада так, чтобы область допустимых начальных условий второго каскада аэрофинишера полностью покрывала область конечных состояний самолета после торможения его на первом каскаде, на режиме захода на посадку наведение траектории полета производят в расположенную на осевой вертикальной плоскости аэрофинишера номинальную точку начала выполнения маневра пологого подъема, затем осуществляют этот маневр вдоль осевой плоскости аэрофинишера до момента наложения захватывающей системы на приемный участок троса, соединяют устройство зацепления с приемным тросом, после чего подавляющую часть кинетической энергии самолета поглощают на первом каскаде аэрофинишера за счет работы, совершаемой сосредоточенной силой подводимой через поводок к основному несущему элементу (основным несущим элементам) конструктивно-силовой схемы самолета, а оставшуюся часть кинетической энергии поглощают на втором каскаде аэрофинишера преимущественно за счет работы распределенных сил, воздействующих на внешнюю поверхность самолета со стороны демпфирующих элементов этого каскада.
Из уровня техники известна система для посадки на палубу судна в условиях интенсивных ветра и морского волнения беспилотного летательного аппарата типа «самолет» с винтовым движителем (RU 130964, B64F 1/00,B63B 15/00, опубл. 10.08.2013). Система включает расположенный на палубе улавливатель, состоящий из поперек натянутого между двумя стойками троса, прикрепленного с возможностью амортизации его натяжения в процессе остановки зацепленного летательного аппарата, установленные на летательном аппарате ответные под упомянутый трос зацепы, и средство постановки зацепленного летательного аппарата на палубу судна, отличающаяся тем, что улавливатель упомянутого летательного аппарата дополнен натянутыми тросами, расположенными с шагом менее значения габаритного размера по вертикали летательного аппарата в количестве не менее величины отношения максимального отклонения летательного аппарата от заданной траектории полета к его вертикальному габаритному размеру, при этом вокруг винтового движителя летательного аппарата установлена защитная насадка, на которой закреплены зацепы под указанные тросы улавливателя, оборудованные замками, а в качестве средства постановки зацепленного летательного аппарата на палубу судна использованы упомянутые стойки улавливателя, которые прикреплены к палубе шарнирно с возможностью их заваливания вместе с зацепленным летательным аппаратом.
Сущность изобретения
Задачей, решаемой заявленным техническим решением, является фиксация аппаратного модуля “якоря” на наземной части системы посадки.
Техническим результатом заявленного технического решения является снижение скорости и полная остановка летящего самолетного беспилотного летательного аппарата с повисанием БПЛА под ПЭ(реей) системы посадки.
Технический результат заявленного изобретения достигается за счет того, что система посадки беспилотного летательного аппарата самолетного типа состоит из мобильной части, закреплённой на беспилотном летательном аппарате и базовой части, установленной на стационарном или подвижном объекте, при этом мобильная часть системы посадки беспилотного летательного аппарата самолетного типа представляет собой контейнер, закрепленный на нижней части фюзеляжа беспилотного летательного аппарата самолетного типа, при этом внутреннее пространство контейнера разделено на переднюю, центральную и заднюю части, при этом в передней части контейнера размещена строго по курсу камера системы наведения, в центральной части контейнера выполнены с возможностью открытия створки, и размещен трос с якорем, а в задней части контейнера, расположен тормозной парашют, и закреплен стропами за трос и за элементы беспилотного летательного аппарат, а базовая часть представляет собой посадочный элемент, выполненный в виде горизонтальной реи, выполненной с возможность поворота вокруг собственной оси, при этом на базовой части системы посадки беспилотного летательного аппарата самолетного типа установлены метки, выполненные с возможностью определения упомянутой камерой.
В частном случае реализации заявленного технического решения метки, расположенные на базовой части системы посадки беспилотного летательного аппарата самолетного типа выполнены с возможностью однозначной идентификации в любое время суток, и расположены на базовой части системы посадки беспилотного летательного аппарата самолетного типа с возможностью указания размера и положения захватывающего устройства, для ручного или автоматического наведения летательного аппарата.
В частном случае реализации заявленного технического решения контейнер мобильной части дополнительно снабжена лебедкой, выполненной с возможность намотки или размотки троса с якорем.
В частном случае реализации заявленного технического решения якорь выполнен аэродинамической формы, например, в форме капли.
В частном случае реализации заявленного технического решения якорь выполнен с отрицательной аэродинамической составляющей.
В частном случае реализации заявленного технического решения якорь выполнен с кольями или без кольев или с защелками.
В частном случае реализации заявленного технического решения трос выполнен резиновым или пропиленовым или выполнен с клеевым покрытием.
В частном случае реализации заявленного технического решения посадочный элемент покрыт липким слоем или выполнен с, расположенными по всей длине, устройствами улавливания троса, выполненные в виде зубьев или петли.
В частном случае реализации заявленного технического решения посадочный элемент дополнительно снабжен обволакивающей сетью, расположенной снизу посадочного элемента.
В частном случае реализации заявленного технического решения посадочный элемент дополнительно снабжен устройствами стабилизации.
В частном случае реализации заявленного технического решения посадочный элемент выполнен с возможностью изменения угла наклона
В частном случае реализации заявленного технического решения посадочный элемент может быть закреплен двумя концами к элементам базового объекта или к двум различным базовым объектам, как непосредственно, так и через переходные механизмы и устройства.
В частном случае реализации заявленного технического решения посадочный элемент выполнен гибким или эластичным.
Краткое описание чертежей
Детали, признаки, а также преимущества настоящей полезной модели следуют из нижеследующего описания вариантов реализации заявленного технического решения с использованием чертежей, на которых показано:
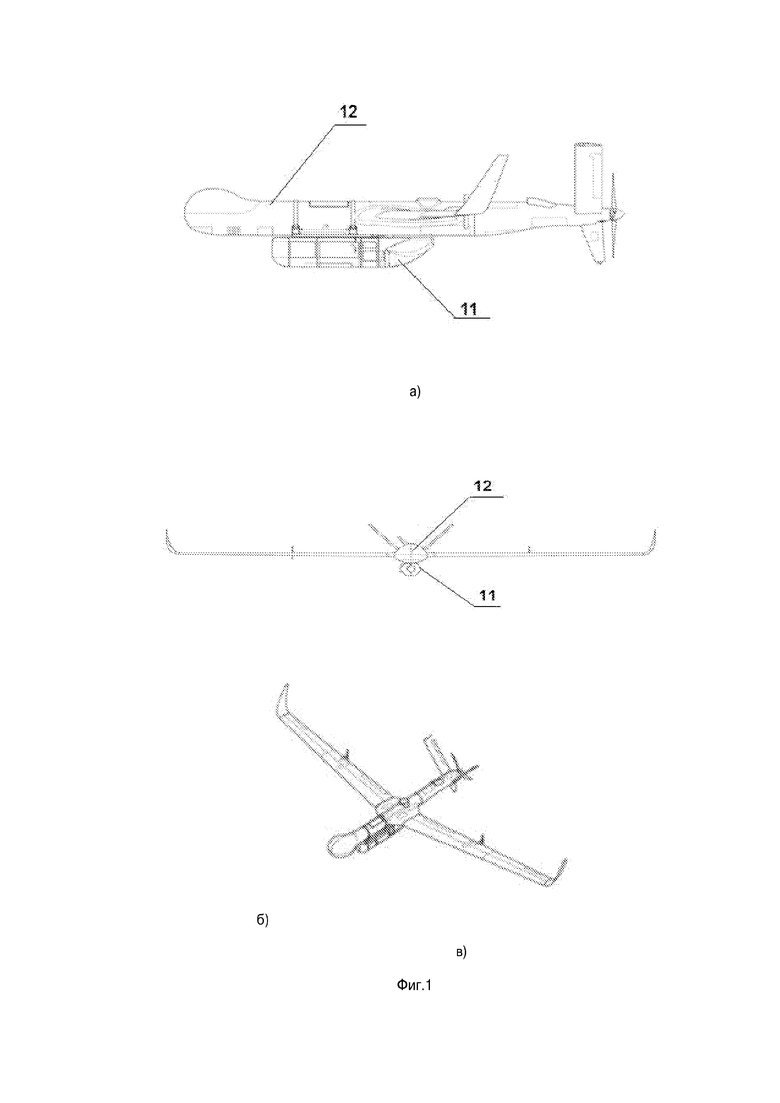
Фиг.1 - общий вид беспилотного летательного аппарата самолетного типа с самолетной частью системы посадки;
а) Вид БПЛА с МЧ сбоку; б) Вид БПЛА с МЧ спереди; в) Вид БПЛА общий вид;
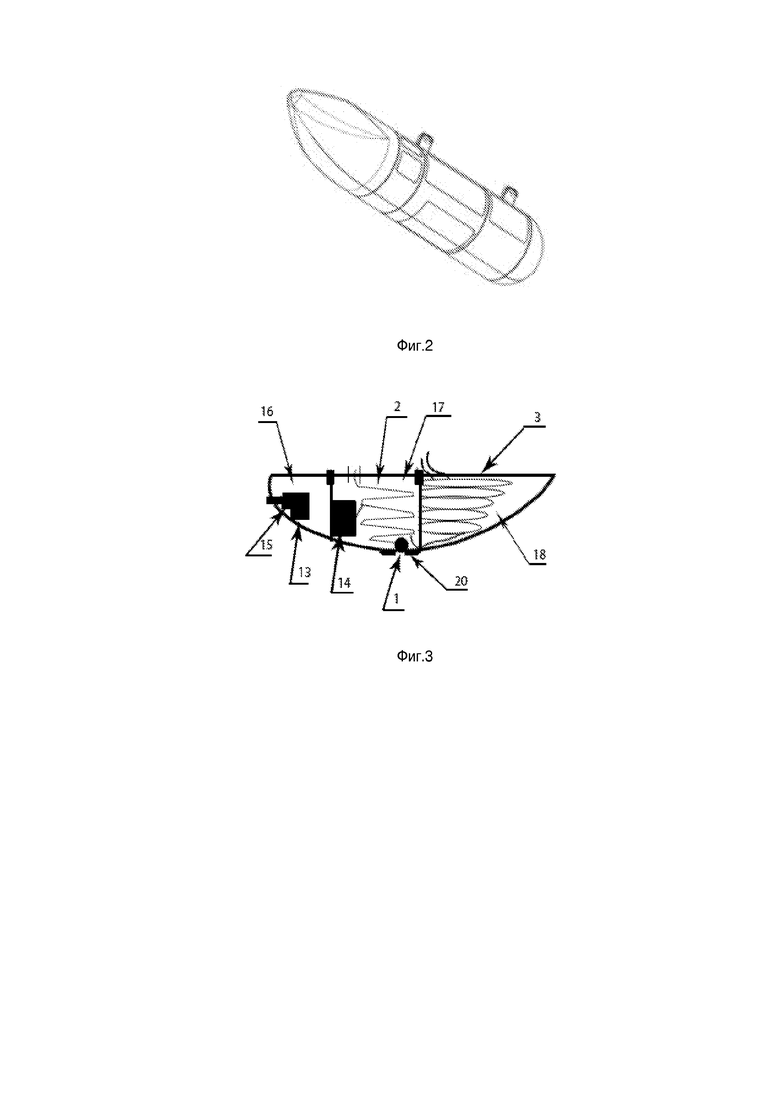
Фиг.2 - контейнер самолетной части системы посадки беспилотного летательного аппарата самолетного типа. Вид МЧ;
Фиг. 3 - Схема и состав МЧ (Контейнера);
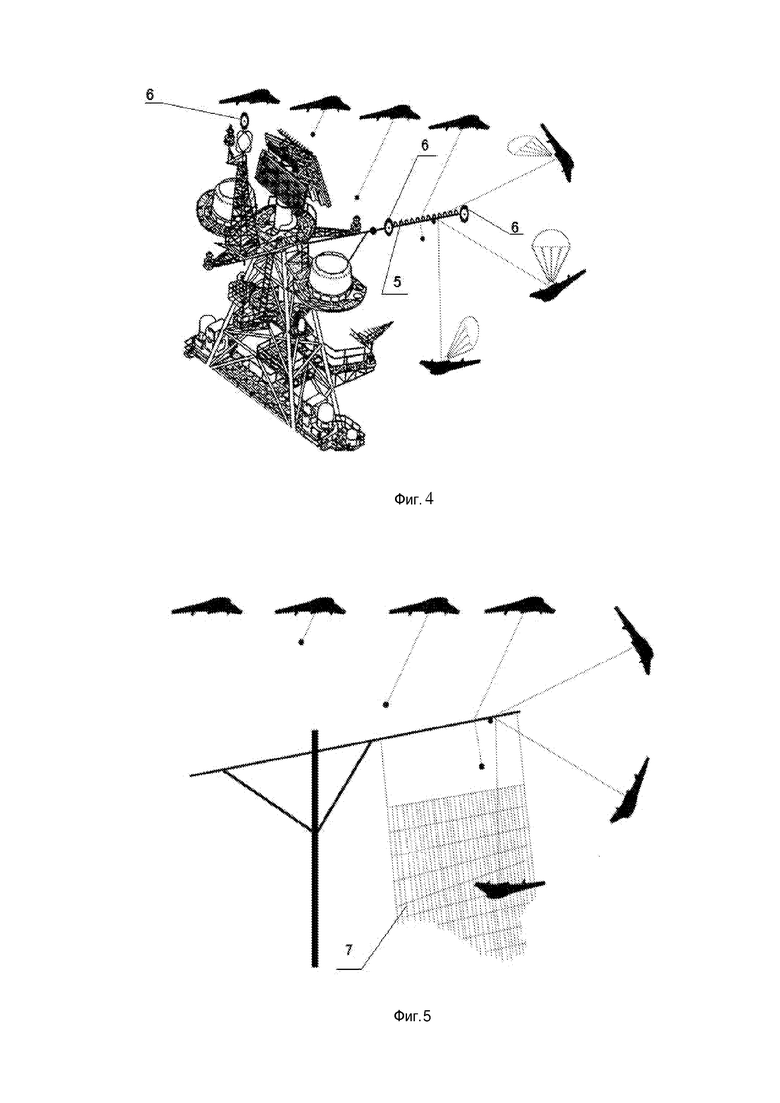
Фиг. 4 - Схема посадки БПЛА с парашютом;
Фиг. 5 - Схема посадки БПЛА с сетью;
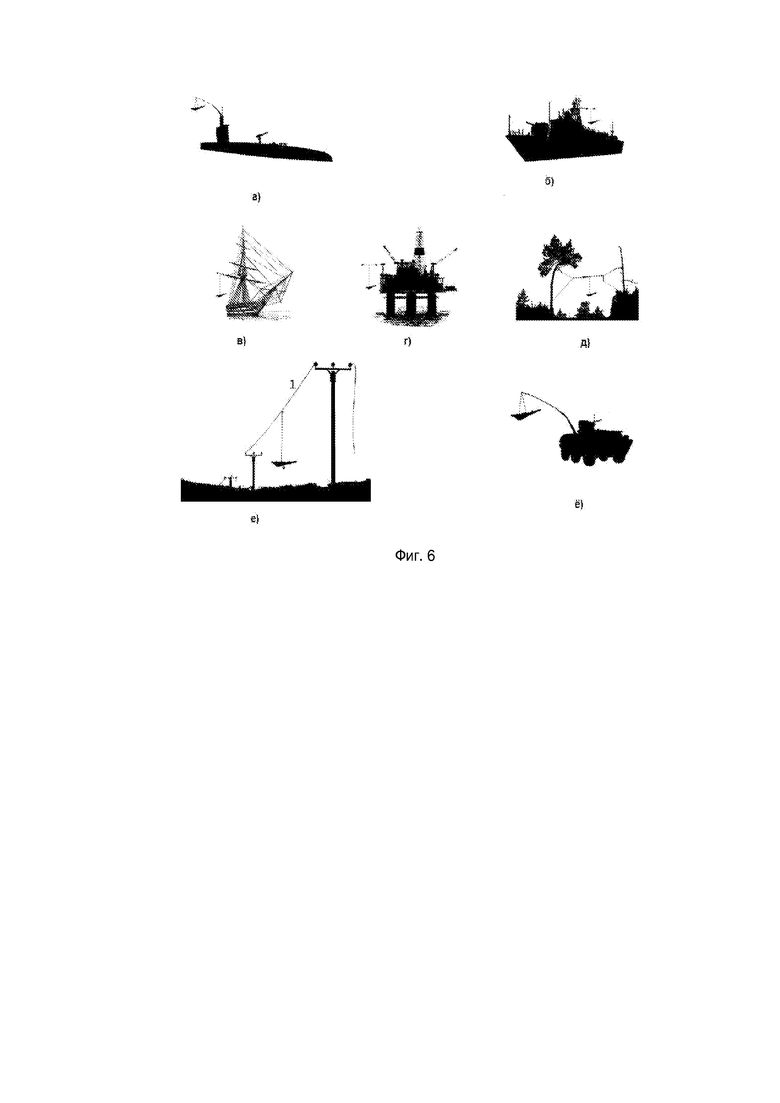
Фиг. 6 - Варианты установки посадочного элемента (ПЭ) системы посадки
а) на подводную лодку б) на боевой корабль в) на мачту парусного судна г) на буровую платформу д) между деревьями е) между столбами на линию электропередачи ё) на транспортное средство;
Фиг. 7 - Вариант фиксирующих элементов установленных на ПЭ;
а) со звездочкой;
б) с защелкой;
в) без фиксатора
Фиг. 8 - Варианты форм якорей;
а) с кольями
б) без кольев
в) с защелками
Фиг. 9 - Иллюстрация работы тормозящего парашюта.
На фигурах цифрами обозначены следующие позиции:
1 - якорь; 2 - трос; 3 - тормозной парашют; 4 - камера системы наведения; 5 - посадочный элемент; 6 - мишень наведения; 7 - тормозящая обволакивающая сеть; 8 - направляющее кольцо на ПЭ; 9 - фиксирующая звездочка на ПЭ; 10 - фиксирующая защелка на ПЭ; 11 - контейнер самолетной части; 12 - летательный аппарат; 13 - видео передатчик; 14 - элемент соединения; 15 - видеокамера; 16 - передняя часть контейнера; 17 - центральная часть контейнера; 18 - задняя часть контейнера; 19 - лебедка; 20 - створки контейнера
Раскрытие изобретения
Система относится к области авиационной техники и предназначена для посадки беспилотных летательных аппаратов (БПЛА) самолетного типа. Система состоит из мобильной части (МЧ), закрепляемой на летательном аппарате и базовой части (БЧ), устанавливаемой на стационарном или подвижном объекте.
Посадка БПЛА самолетного типа с помощью данной системы осуществляется методом закручивания якоря, спускаемого или сбрасываемого с летательного аппарата из мобильной части, вокруг элемента посадки, расположенного на стационарном или движущемся объекте, при пролете над ним БПЛА самолетного типа. БПЛА, после захвата якоря, спускаемого с него, переходит на траекторию вращения в вертикальной плоскости вокруг точки захвата на основании крепления устройства захвата, что в конечном итоге приводит к повисанию БПЛА на основании УЗ.
При этом после возникновения натяжения соединительного элемента, вследствие закручивания его вокруг посадочного элемента, БПЛА не просто вращается, а переходит на полет по окружности с центром в точке контакта соединительного и посадочного элементов, чем создает минимальную нагрузку на посадочный элемент.
Мобильная часть системы представляет собой контейнер (11), закрепленный на нижней части фюзеляжа беспилотного летательного аппарата (12). Внутреннее пространство контейнера (11) разделено на 3 части. В центральной (17) части контейнера расположен трос (2) якорем (1), трос (2) уложен так, чтобы не было переплетения при выбросе якоря (1). Центральная (17) часть контейнера снабжена створками, выполненными в нижней части центральной части контейнера. Створки открываются при помощи сервоприводов (не показаны на фигурах), сервоприводы открывают створки вниз и выпускают якорь. Сервоприводы установлены у основания створок.
В передней (16) части контейнера размещена камера (4) системы наведения. Камера (4) расположена строго по курсу аппарата, так, чтобы конструктивные элементы самолёта не затеняли камере обзор. В задней (18) части контейнера, расположен тормозной парашют (3). Парашют (3) используется для гашения скорости летательного аппарата (12) после захвата якоря (1). Все части в контейнере разделены перегородками.
Якорь может быть аэродинамической формы, например, в форме капли, для лучшей стабилизации в ветровом потоке или в форме, которая позволит зацепиться за ПЭ. Также якорь может быть выполнен с отрицательной аэродинамической составляющей, для натяжения троса и прижатия якоря к земле. Варианты выполнения якорей с кольями б) без кольев в) с защелками представлены на фигуре 8.
Также в контейнере(11), в варианте реализации заявленного технического решения, дополнительно установлена лебедка(19), затягивающая назад трос (2) с якорем (1) обратно в контейнер (11), в случае если БПЛА пролетел мимо посадочного элемента.
Контейнер (11) может быть установлен на любой другой БПЛА со схожими характеристиками. По таким параметрам, как строение фюзеляжа, вес и посадочная скорость.
Контейнер (11) самолетной части системы посадки закреплен на нижней части фюзеляжа беспилотного летательного аппарата при помощи жесткого крепления (14) или при помощи мягкого крепления, такого как пружины или другие материалы и конструкции, которые имеют возможность растягиваться, не повреждая себя и конструкцию.
В качестве системы наведения могут быть использована видеокамера (4). Видеокамера (4) расположена в контейнере (11) по курсу БПЛА (12). На наземном сегменте системы посадки, установлены метки (6), которые видит камера (4) и распознать система технического зрения. Камера (4) подключена в зависимости от комплектации оборудования, либо к видео передатчику (13), который отправляет информацию на землю или на БПЛА, для обработки, либо напрямую через провод в автопилот, либо к микроконтроллеру, который производит анализ изображений и отправляет информацию в автопилот, для корректировки курса.
Тормозной парашют (3) вытягивается при закручивания троса за посадочный элемент (5) и гасит скорость летательного аппарата. Тормозной парашют (3) расположен в задней (18) части контейнера (11) и закреплен стропами за трос таким образом, чтобы сразу набрать в себя воздух который вытягивает его и к элементам самолёта, чтобы время до его эффективного использования было минимальным.
Заявленная система также может дополнительно снабжена обволакивающей сетью (7). В этом случае дополнительно снизу посадочного элемента (5) устанавливают обволакивающую сеть (7) таким образом, чтобы она свисала вниз от посадочного элемента(5). Обволакивающая сеть замедлит движения аппарата по окружности и не позволит зайти ему на второй круг вращения при этом выпуск тормозного парашюта (3) не происходит. Этот вариант применим для аппаратов до 10кг. Сеть расположена к элементу посадки под любым углом, который определяется необходимостью: предотвращения удара об окружающие объекты, гашения колебательных движений БПЛА, предотвращения дальнейших перекидываний БПЛА через посадочный элемент.
Посадочный элемент (5), может быть стабилизирован, за счет подъемно-опускающих механизмов, которые стабилизируют посадочный элемент во время движения базового объекта, на котором установлен посадочный элемент. Системы стабилизации в данной заявке не раскрываются. Устройство, которое будет изменять угол наклона всей системы, при помощи, например, ленточного редуктора. Посадочный элемент (5) может быть закреплен двумя концами к элементам базового объекта или к двум различным базовым объектам, как непосредственно, так и через различные переходные механизмы и устройства. Основание посадочного элемента (5) может быть гибким или эластичным. При этом на базовой части расположены визуально или технически определяемые и однозначно идентифицируемые в любое время суток элементы, указывающие на размер и положение захватывающего устройства, для ручного или автоматического наведения летательного аппарата. Элементы представляют из себя подсвечиваемые метки установленные по краям системы посадки, еще одна метка должна быть установлена выше других меток, чтобы указать высоту оптимальную для пролета БПЛА, еще метка должна быть установлена вдоль борта судна раньше системы посадки, для создания объема при помощи меток, с целью более точного расчета координат всех точек.
Посадочный элемент (5) представляет собой горизонтальную рею, выполненную с возможностью расположения деталей или материалов, предотвращающих соскальзывание троса (2) с посадочного элемента (5), например, липкая поверхность, нанесенная вокруг посадочного элемента (5) или на горизонтальной рее расположены устройства улавливания троса (2) выполненные в виде зубьев (10) в которых происходит фиксация якоря, например, в виде петли (8). После захвата якоря (1) устройством улавливания, выполненного по всей длине посадочного элемента (5) в виде непрерывно установленных зубьев (10) или непрерывно установленных петель (8), для предотвращения столкновения летательного аппарата с основанием крепления системы захвата, основание системы проворачивается вокруг точки своего крепления по ходу полета БПЛА, с усилием, необходимым для гашения энергии БПЛА и остановки его вращательного движения в необходимой конечной точке. При этом зубья (10) или петли (8) расположены спереди реи со стороны подлета БПЛА, при этом трос (2) выполнен резиновым или пропиленовым или на трос выполнен с клеевым покрытием. За счет выполнения посадочного элемента (5) и троса (2) с вышеуказанными характеристиками предотвращается проскальзывание троса (2) относительно посадочного элемента (5).
Для более точного захвата якоря и снижения перегрузок в момент торможения, основание базовой части может быть стабилизирована, за счет специальных подъемно-опускающих механизмов, которые могут стабилизировать ПЭ во время движения объекта, на котором она установлена.
Устройство, которое будет изменять угол наклона всей системы, при помощи например ленточного редуктора, как в ручном режиме, при помощи физической силы так и в автоматическом режиме, где ПЭ будет стремиться всегда быть параллельным поверхности земли.
Основание базовой части может вращаться вокруг своей продольной оси для выполнения различных задач: разблокировка якоря при снятии аппарата после посадки, для предотвращения повреждения конструкции базовой части при использовании жесткого соединительного элемента между якорем и летательным аппаратом. Для этого место установки посадочного элемента, должно быть снабжено втулкой и подшипником, на котором при освобождении второго конца ПЭ, сможет происходить вращение вокруг оси.
Данная система более эффективна перед другими системами за счет следующих своих преимуществ: возможности посадки на любых, с соответствующими размерами для безопасной эксплуатации, объектах: балка, рей, трос, провод, ветка дерева и т.д.; простоты установки на любой беспилотный летательный аппарат; большой точности конечного положения аппарата после посадки; возможности осуществления посадки не только на стационарных, но и на перемещающихся объектах, например, судах; возможности вынесения зоны посадки за пределы специальных зон и зон общего пользования: палуба, вертолетная площадка и т.д; возможности значительного отклонения при заходе БПЛА на посадку, при которой посадка все равно будет успешной, например, при порывистом боковом ветре или при качке судна, с соответствующими отклонениями устройства захвата якоря; возможности допуска большой погрешности при посадке в неблагоприятных условиях, за счет наращивания соединительного и посадочного элементов; минимального износ частей БПЛА за счет того, что при посадке исключена возможность контакта с твердыми элементами поверхности посадочной площадки; возможности посадки аппарата в местах непредназначенных для этого, без особого риска для состояния аппарата и его комплектации, например, в горной или болотистой местности; возможности точной автономной, при помощи системы наведения, посадки на стационарных объектах или на объектах с вычисляемыми координатами на момент необходимости посадки, для входа в зону действия автоматической системы наведения (например, по маршруту следования судна); автоматический уход на повторную попытку при неудачной посадке; простота эксплуатации; - простота конструкции; низкая себестоимость для простых комплектаций; универсальность системы для аппаратов, близких по физическим характеристикам; возможность использования в любое время суток, при наличии описанных систем визуального контроля и наведения (систем технического зрения)
Алгоритм работы
При заходе аппарата на курсоглиссадную траекторию система наведения, в общем случае камера, обнаруживает метки (6), установленные на базовом объекте посадочного элемента, БПЛА начинает корректировать курс, для прохода над посадочным элементом, на высоте не более длины троса, после чего БПЛА через ручное управление или на основе автоматических алгоритмов, открывает створки контейнера и выбрасывает якорь, который еще какое-то время висит под аппаратом, чтобы стабилизироваться в ветровом потоке, и зацепляется за рею, когда начинается натяжение за трос, вытягивается тормозной парашют, который гасит скорость при движении аппарата по окружности, БПЛА, после захвата якоря, спускаемого с него, переходит на траекторию вращения в вертикальной плоскости вокруг точки захвата посадочного элемента, что в конечном итоге приводит к повисанию БПЛА на основании УЗ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678407C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| Система посадки беспилотных летательных аппаратов | 2024 |
|
RU2834064C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА НА АЭРОФИНИШЕР | 2009 |
|
RU2399560C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА САМОЛЕТНОГО ТИПА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2767389C1 |
| ТРАНСПОРТНЫЙ ГРУЗОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2776617C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2615587C9 |
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| УСТРОЙСТВО ДЛЯ ВЗЛЕТА И ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2694251C2 |
Изобретение относится к области авиационной техники. Система посадки беспилотного летательного аппарата (БПЛА) состоит из мобильной части (МЧ), закрепляемой на летательном аппарате, и посадочного элемента (ПЭ), закрепленного на стационарном или подвижном объекте. МЧ представляет контейнер, который закреплен на нижней части фюзеляжа БПЛА. Контейнер разделен на переднюю, центральную и заднюю части. В передней части контейнера размещена строго по курсу камера системы наведения. В центральной части контейнера выполнены с возможностью открытия створки и размещен трос с якорем. В задней части контейнера расположен тормозной парашют и закреплен стропами за трос и за элементы БПЛА. Базовая часть представляет посадочный элемент, выполненный в виде горизонтальной реи, выполненной с возможность поворота вокруг собственной оси и с метками для определения камерой МЧ. Посадка БПЛА осуществляется путем закручивания вокруг посадочного элемента навстречу друг другу БПЛА и якоря, спускаемого из контейнера перед посадкой. Изобретение направлено на повышение точности посадки. 12 з.п. ф-лы, 9 ил.
1. Система посадки беспилотного летательного аппарата самолетного типа, состоящая из мобильной части, закреплённой на беспилотном летательном аппарате, и базовой части, установленной на стационарном или подвижном объекте, при этом
мобильная часть системы посадки беспилотного летательного аппарата самолетного типа представляет собой контейнер, закрепленный на нижней части фюзеляжа беспилотного летательного аппарата самолетного типа, при этом внутреннее пространство контейнера разделено на переднюю, центральную и заднюю части, при этом в передней части контейнера размещена строго по курсу камера системы наведения, в центральной части контейнера выполнены с возможностью открытия створки и размещен трос с якорем, а в задней части контейнера расположен тормозной парашют и закреплен стропами за трос и за элементы беспилотного летательного аппарат,
а базовая часть представляет собой посадочный элемент, выполненный в виде горизонтальной реи, выполненной с возможность поворота вокруг собственной оси, при этом на базовой части системы посадки беспилотного летательного аппарата самолетного типа установлены метки, выполненные с возможностью определения упомянутой камерой.
2. Система посадки по п.1, отличающаяся тем, что метки, расположенные на базовой части системы посадки беспилотного летательного аппарата самолетного типа, выполнены с возможностью однозначной идентификации в любое время суток и расположены на базовой части системы посадки беспилотного летательного аппарата самолетного типа с возможностью указания размера и положения захватывающего устройства для ручного или автоматического наведения летательного аппарата.
3. Система посадки по п.1, отличающаяся тем, что контейнер мобильной части дополнительно снабжена лебедкой, выполненной с возможность намотки или размотки троса с якорем.
4. Система посадки по п.1, отличающаяся тем, что якорь выполнен аэродинамической формы, например в форме капли.
5. Система посадки по п.1, отличающаяся тем, что якорь выполнен с отрицательной аэродинамической составляющей.
6. Система посадки по п.1, отличающаяся тем, что якорь выполнен с кольями или без кольев или с защелками.
7. Система посадки по п.1, отличающаяся тем, что трос выполнен резиновым или пропиленовым или выполнен с клеевым покрытием.
8. Система посадки по п.1, отличающаяся тем, что посадочный элемент покрыт липким слоем или выполнен с расположенными по всей длине устройствами улавливания троса, выполненными в виде зубьев или петли.
9. Система посадки по п.1, отличающаяся тем, что посадочный элемент дополнительно снабжен обволакивающей сетью, расположенной снизу посадочного элемента.
10. Система посадки по п.1, отличающаяся тем, что посадочный элемент дополнительно снабжен устройствами стабилизации.
11. Система посадки по п.1, отличающаяся тем, что посадочный элемент выполнен с возможностью изменения угла наклона
12. Система посадки по п.1, отличающаяся тем, что посадочный элемент может быть закреплен двумя концами к элементам базового объекта или к двум различным базовым объектам как непосредственно, так и через переходные механизмы и устройства.
13. Система посадки по п.1, отличающаяся тем, что посадочный элемент выполнен гибким или эластичным.
| СПОСОБ ПОЛУЧЕНИЯ РАЗВЕРНУТОГО ГРАФИТА И СОРБЕНТ ИЗ РАЗВЕРНУТОГО ГРАФИТА, ПОЛУЧЕННОГО ЭТИМ СПОСОБОМ | 2000 |
|
RU2186728C2 |
| US 20090242693 A1, 01.10.2009 | |||
| JP 0007304498 A, 21.11.1995 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2003 |
|
RU2235045C1 |

