Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству управления стрелой. Более конкретно, изобретение относится к интеллектуальному устройству управления стрелой.
Предпосылки к созданию изобретения
Разнообразные строительные машины со стрелой широко используются. Стрела представляет собой устройство, включающее в себя, по меньшей мере, три секции стрелы, шарнирно соединенных посредством горизонтальных осей шарниров. Каждая секция стрелы может поворачиваться на значительный угол вокруг осей шарниров. При этом стрела в целом крепится к раме машины посредством поворотной платформы, которая может повернуть стрелу в целом на 360 градусов вокруг вертикальной оси, вертикальной относительно горизонтальной плоскости. Типичным применением такой стрелы является работа в качестве строительного оборудования, например для перемещения объектов из одного места в другое и их подъема. В настоящее время такие стреловые устройства широко применяются на строительной площадке для укладки бетона и других подобных работ.
Например, автобетононасос с бетонораспределительной стрелой является типичной строительной машиной со стрелой. Такая машина применяется для укладки бетона, в соответствии с требованиями органов управления, на строительных площадках, на которых требуется укладка бетона. Когда стреловое устройство применяется для укладки бетона и т.п., требования по управлению для стрелового устройства являются относительно жесткими, особенно имеется необходимость точно управлять траекторией движения конца стрелы.
На фиг.1 показана конструкция стрелы такого автобетононасоса. Конструкция и принципы управления данной стрелы будут описаны далее со ссылкой на Фиг.1.
Как показано на Фиг.1, автобетононасос 8 включает в себя стрелу 9 и раму 10 машины, сформированную на шасси автомобиля.
Показанная на Фиг.1 стрела 9 состоит из пяти секций 12-16 стрелы, шарнирно соединенных друг с другом, и поворотной платформы, приводимой в движение посредством гидромотора и выполненной с возможностью вращения вокруг вертикальной оси 18. Пять секций стрелы называются первой стойкой 12, второй стойкой 13, третьей стойкой 14, четвертой стойкой 15 и пятой стойкой 16, каждая секция стрелы управляется связанным с ней одним из гидроцилиндров 31-35 соответственно, которые могут повернуть соответствующие управляемые ими секции стрелы вокруг их соответствующих осей шарниров. При этом поворотная платформа 11 может также приводиться во вращение поворотным гидромотором 30 (не показан на Фиг.1, см. Фиг.2). При строительстве, путем перемещения ручки управления устройства дистанционного управления, оператор может управлять движением стрелы и поворотом поворотной платформы так, чтобы поместить конец 20 стрелы, имеющий концевой рукав 17, над участком, на котором должен будет укладываться бетон. Концевой рукав 17 соединен с бетонотранспортным насосом, и бетон выбрасывается через концевой рукав 17 так, чтобы осуществить укладку бетона.
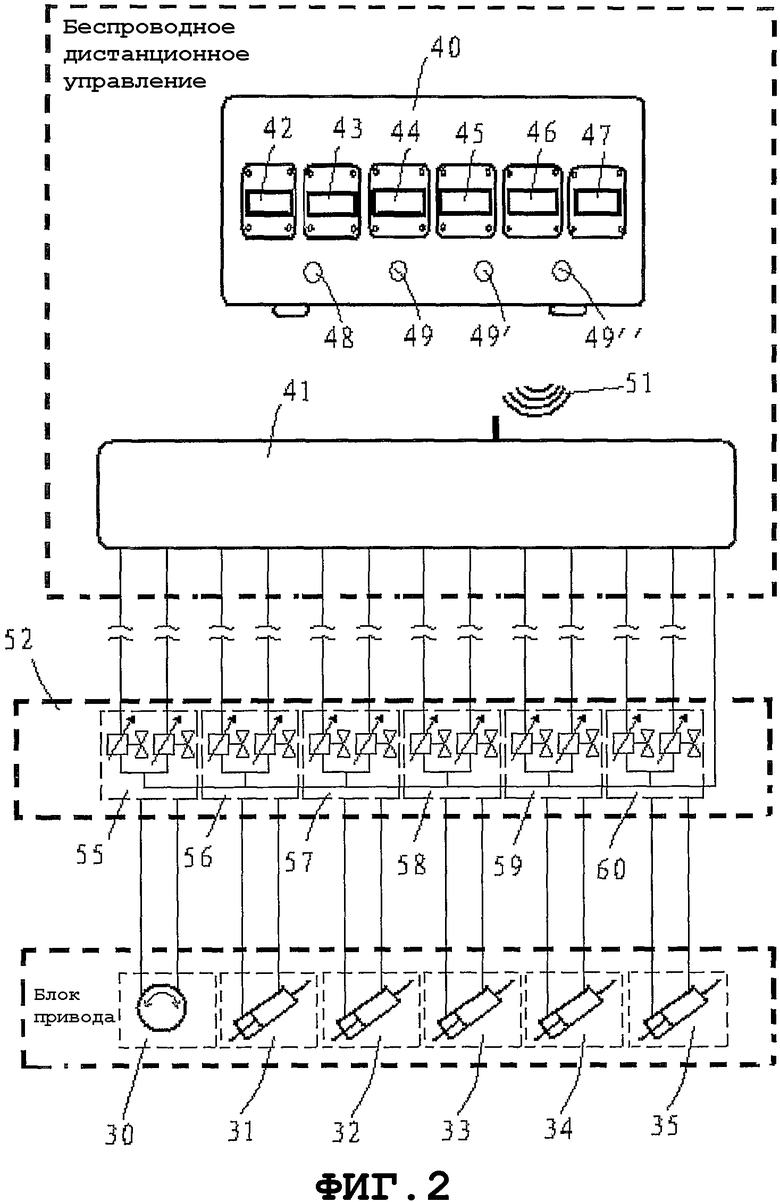
На Фиг.2 показана система управления перемещением стрелы, показанной на Фиг.1, согласно предшествующему уровню техники. Данная система включает в себя устройство 40 дистанционного управления, которое может передавать беспроводной сигнал дистанционного управления, приемник 41, закрепленный на машине, электрогидравлический управляющий элемент, а именно электрический пропорциональный многоходовой клапан 52, гидромотор 30 и исполнительный блок 53, состоящий из гидроцилиндров 31-35.
Как показано на Фиг.2, устройство 40 дистанционного управления включает в себя шесть пропорциональных рычагов 42-47 управления, которые могут перемещаться вверх и вниз вдоль основного направления регулирования и могут передавать сигналы дистанционного управления в виде аналоговой величины для управления поворотной платформой и соответствующими секциями стрелы соответственно. Сигналы дистанционного управления передаются на приемник 41, закрепленный на транспортном средстве, посредством радиоволны 51 на определенной частоте. Устройство 40 дистанционного управления также включает в себя ряд других механизмов 48, 49, 49', 49'' переключения, при приведении в действие которых другие, связанные с ними, радиосигналы дистанционного управления передаются посредством радиоволны 51 на определенной частоте к радиоприемнику 41. При регулировании рабочего положения конца стрелы, если необходимы действие определенной секции стрелы или поворотное действие, команда управления может быть передана путем манипулирования в направлении вперед или назад соответствующими пропорциональными рычагами 42-47 управления. После получения радиосигналов, приемник 41 выдает управляющие широтно-модулированные сигналы (ШИМ-сигналы), соответствующие каждой секции стрелы или поворотной платформе, на электрический пропорциональный многоходовой клапан 52, с тем чтобы осуществить управление. Электрический пропорциональный многоходовой клапан 52 включает в себя электрические пропорциональные клапаны 56-60 для привода гидроцилиндров 31-35 соответственно и дополнительно включает в себя электрический пропорциональный клапан 55 для привода реверсивного гидромотора 30. Перемещение штока гидроцилиндров 31-35 заставляет соответствующие секции стрелы поворачиваться ограниченно вокруг осей шарниров. Вращение гидромотора 30 может заставить с помощью редуктора стрелу 9 в целом поворачиваться вокруг вертикальной оси 18.
Описанное выше представляет собой обычный способ для осуществления действия односекционной стрелой. Данный вариант не требует для стрелы измерительной системы и системы датчиков, а также системы преобразования координат, поддерживаемой компьютером, однако он вызывает сложности при функционировании. Например, если предположить на Фиг.1, что концевой рукав 17 необходимо переместить из положения, показанного на чертеже, в положение А, без изменения высоты конца 20 стрелы, оператор должен переместить, по меньшей мере, две или более секций стрелы. Тем самым оператор должен управлять двумя из рычагов 43-47 управления, чтобы переместить рукав 17 из положения, показанного на чертеже, в положение А, без изменения высоты. Однако, если требуется выполнить данную операцию быстро, даже опытному оператору может быть трудно удержать на одной высоте конец 20 стрелы во время процесса перемещения.
В предшествующем уровне техники были предложены ряд технических решений по осуществлению автоматического управления перемещением стрелы, используя технические средства автоматического регулирования, чтобы решить вышеописанную проблему перемещения многосекционной стрелы без изменения ее рабочей высоты. Согласно этим техническим решениям простое и легкое управление стрелой осуществляется посредством измерительной системы и системы датчиков стрелы, а также системы преобразования координат, поддерживаемой компьютером.
Например, в патенте Германии DE-A-4306127 (см. также патент США 6862509), принадлежащий компании Putzmeister, предлагается устройство управления стрелой, в котором сформирована цилиндрическая система, которая имеет три координатные оси: ψ, r и h (см. Фиг.1). Три координатные оси соответствуют повороту стрелы (ψ), удлинению или укорачиванию стрелы (r) и увеличению или уменьшению высоты стрелы (h).
В патенте, принадлежащем компании Putzmeister, чтобы выполнить управление по трем направлениям цилиндрической системы координат, определенным выше, используется рычаг управления, имеющий три направления основного регулирования. Каждое направление основного регулирования рычага управления соответствует одной координатной оси. Когда оператор перемещает рычаг управления, сигнал, соответствующий связанной с ним координатной оси, генерируется согласно направлению перемещения рычага управления, и через вычисление посредством компьютера, компоненты управления, соответствующие относительному повороту соответствующих секций стрелы и повороту стрелы в целом, генерируются так, чтобы стрелой можно было управлять, чтобы переместить ее в заданной системе координат в соответствии с действием рычага управления. Компоненты управления по трем координатным осям могут также комбинироваться таким образом, что действие органов управления может передать сигналы управления, относящиеся к более чем двум направлениям координатных осей, чтобы выполнить управление концом стрелы простым, но точным образом, особенно управление по координатным осям, параллельным горизонтальной плоскости.
В интеллектуальном устройстве управления стрелой, предлагаемом в вышеописанном патенте, сформированная там система координат является в большой степени интуитивистской, что очень удобно для оператора, чтобы перемещать конец стрелы из одного положения в другое в пространстве.
Однако интеллектуальное устройство управления, описанное выше, все же имеет очевидные недостатки.
Для обычного применения стрелы, такого как применение ее в автобетононасосе при укладке бетона, то как переместить конец стрелы из одного пространственного положение в другое пространственное положение, является только одной из связанных с ее работой проблем. Кроме того, существует необходимость в точном управлении траекторией перемещения конца стрелы, так чтобы осуществлялось правильное выполнение укладки.
Во время выполнения укладки, укладка вдоль прямых линий, перпендикулярных друг другу, является типичным способом укладки. При данном способе укладки траектория перемещения конца стрелы должна представлять собой прямую линию.
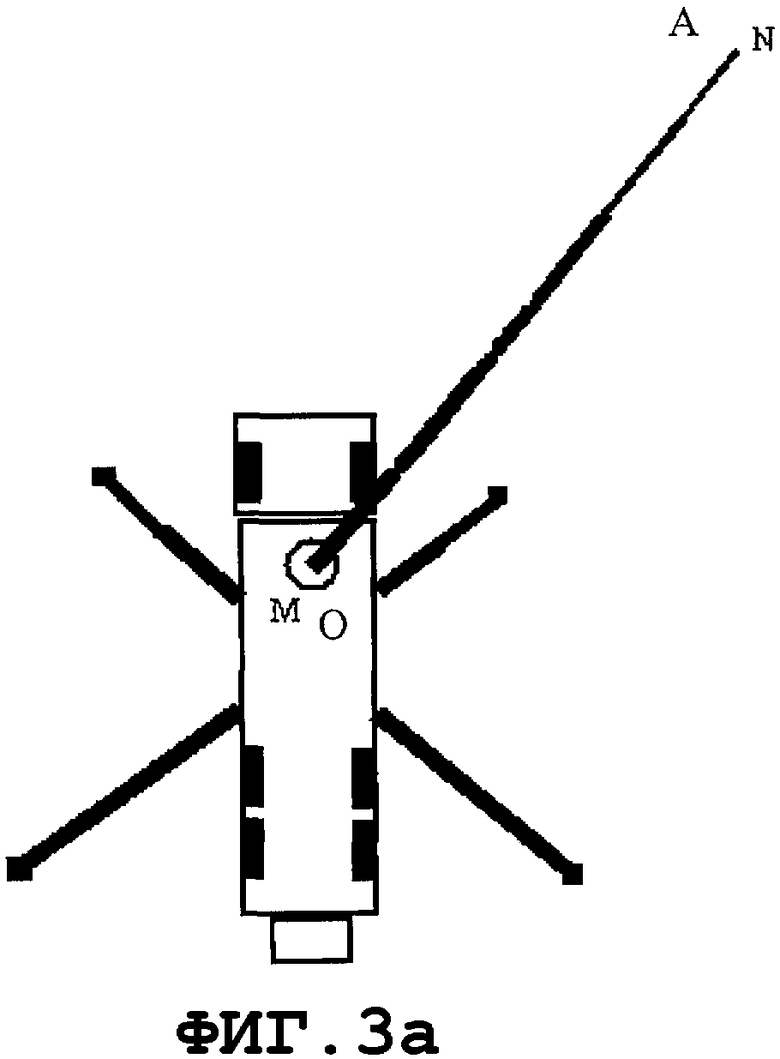
В режиме цилиндрических координат, предлагаемом в предшествующем уровне техники, траектория перемещения конца стрелы обычно представляет собой скорее дугу, чем прямую линию, вследствие адаптации оси поворота. На Фиг.3 показан процесс формирования траектории перемещения, выполняемого из точки А в плоскости в точку D в той же плоскости в режиме цилиндрических координат, описанном выше. В этом примере предполагается, что перемещение в направлении оси h (по высоте) не требуется, т.е. перемещение из точки А в точку D осуществляется на одной высоте.
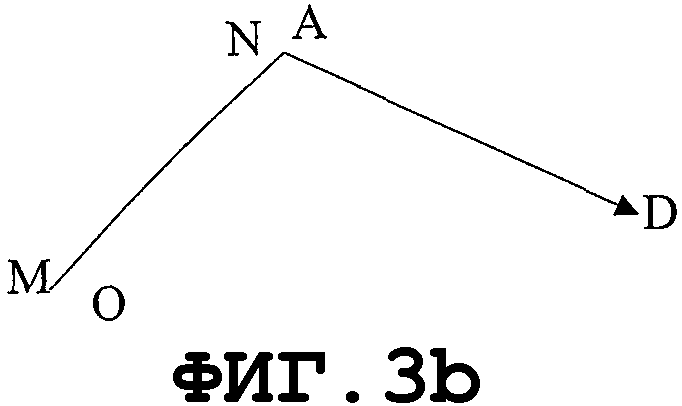
На Фиг. 3а показана проекция начального положения стрелы на горизонтальную плоскость. В этом положении конец N стрелы расположен в точке А в плоскости цилиндрических координат с поворотной платформой в качестве начала отсчета О координат. Имеющееся требование по управлению показано на Фиг.3b, это перемещение конца N стрелы из текущей точки А в точку D, и требуемая траектория перемещения представляет собой прямую линию от точки А до точки D, показанную на Фиг.3b. Однако в режиме цилиндрических координат реальная траектория конца N стрелы не является прямой линией.
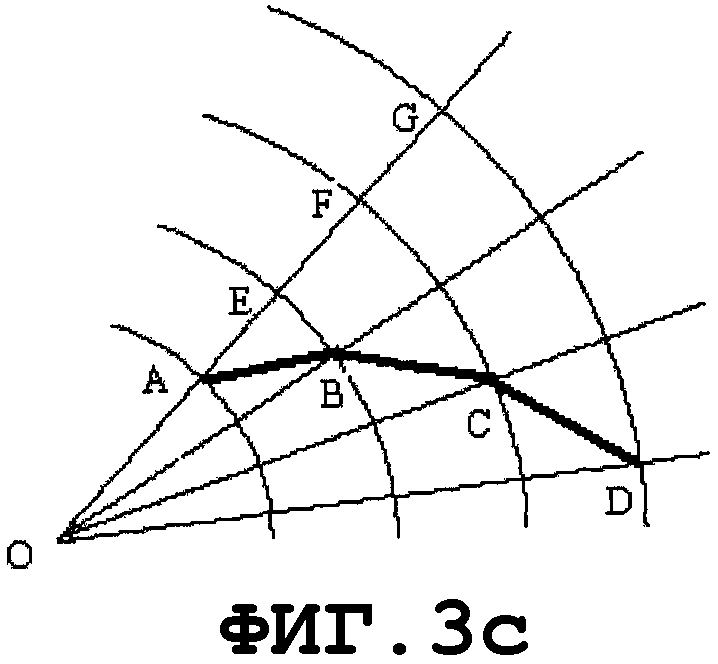
На Фиг.3c показана траектория конца стрелы в режиме цилиндрических координат. В данном режиме цилиндрических координат траектория перемещения конца стрелы раскладывается на перемещение по оси ψ и перемещение по оси r. При таком раскладывании перемещения конец N стрелы будет поворачиваться вокруг оси ψ в направлении оси и одновременно с этим перемещаться по оси r, т.е. прямой линии в направлении MN удлинения стрелы. В исходном состоянии конец N стрелы MN совпадает с точкой А, т.е. проекция стрелы MN на горизонтальную плоскость - OA; проекция стрелы на плоскость в следующую единицу времени - ОВ, потому что стрела поворачивается и одновременно удлиняется во время ее перемещения. Аналогично, проекция стрелы на плоскость в следующую единицу времени - ОС, и проекция стрелы на плоскость при перемещении в конечную заданную позицию D - OD. Таким образом, траектория проекции конца N стрелы на плоскость представляет собой ломаную линию от точки А до точки D. Данная линия является траекторией, сформированной только из нескольких точек, соответствующих определенным моментам времени. Фактически же траектория конца N стрелы из точки А в точку D представляет собой дугу с увеличивающимся радиусом. Такая траектория перемещения не имеет негативного эффекта при общих строительных работах. Однако, в случае укладки цемента и т.п., где требования по управлению для траектории перемещения конца N стрелы относительно высоки, вышеописанная траектория перемещения не может удовлетворить требованиям к функционированию.
Сущность изобретения
Настоящее изобретение предлагает интеллектуальное устройство управления стрелой, которое может перемещать конец стрелы из одного положения в другое вдоль прямолинейной траектории и тем самым удовлетворяет требованиям строительства, при которых траектория перемещения конца стрелы должна являться прямой линией.
Настоящее изобретение предлагает интеллектуальное устройство управления стрелой, которая шарнирно прикреплена к поворотной платформе, выполненной с возможностью поворота вокруг вертикальной оси и закрепленной на раме машины, причем стрела имеет, по меньшей мере, три секции стрелы, шарнирно соединенные друг с другом посредством горизонтальных осей шарниров, при этом каждая секция стрелы выполнена с возможностью ограниченного поворота вокруг осей шарниров, параллельных друг другу, относительно поворотной платформы или других секций стрелы под действием приводных механизмов, причем указанное интеллектуальное устройство управления стрелой, содержит:
блок управления для управления соответствующими приводами согласно командам управления так, что конец стрелы перемещается в заданной системе координат в соответствии с командами управления;
блок измерения угла, включающий в себя датчики для измерения углов между секциями стрелы, а также угла поворота поворотной платформы, при этом данный блок используется для обеспечения измеренной величиной углов блока управления, который вычисляет информацию о положении стрелы на основании измеренной величины углов, в соответствии с чем корректирует управление соответствующими приводными механизмами;
устройство дистанционного управления для передачи команд управления в форме беспроводного дистанционного управления;
в котором устройство дистанционного управления может обеспечить команды управления перемещением, используемые в прямоугольной системе координат, причем команда управления перемещением включает в себя компонент по оси X, компонент по оси Y и компонент по оси Z;
прямоугольная система координат образована в пространстве, ось X, ось Y и ось Z данной прямоугольной системы координат соответствуют компоненту по оси X, компоненту по оси Y и компоненту по оси Z команд управления перемещением устройства дистанционного управления соответственно, причем плоскость, образованная плоскостью прямоугольной системы координат, содержащей ось X и ось Y, параллельна горизонтальной плоскости, при этом направление вверх, вертикальное к горизонтальной плоскости, всегда рассматривается как положительное направление оси Z;
когда устройство дистанционного управления передает команду управления перемещением, блок управления определяет направление перемещения конца стрелы в плоскости прямоугольной системы координат на основании компонента по оси X и компонента по оси Y полученной команды управления перемещением и раскладывает перемещение на перемещение каждой секции стрелы и поворотной платформы так, что конец стрелы перемещается в направлении, указанном командой управления перемещением в прямоугольной системе координат.
Предпочтительно, устройство дистанционного управления использует пропорциональный рычаг управления, имеющий два основных направления регулирования, чтобы обеспечить команду управления перемещением, причем одно основное направление регулирования соответствует оси X, другое основное направление регулирования соответствует оси Y, при этом, когда пропорциональный рычаг управления наклоняется в направлении ином, чем основные направления регулирования, команда управления перемещением генерируется на основании компонента по оси X, полученного путем проекции перемещения пропорционального рычага управления на основное направление регулирования по оси X, и компонент по оси Y получается путем проекции перемещения пропорционального рычага управления на соответствующее основное направление регулирования по оси Y.
Предпочтительно, когда передана команда установки прямоугольной системы координат, образуется прямоугольная система координат, ограниченная осью X и осью Y, используя поворотную платформу в качестве начала отсчета, и направление удлинения стрелы в качестве положительного направления оси Y данной прямоугольной системы координат.
Предпочтительно, команда установки прямоугольной системы координат передается, когда пропорциональный рычаг управления устройства дистанционного управления возвращается в центральное положение.
Предпочтительно, прямоугольная система координат устанавливается следующим образом: записывается начальное положение точки конца стрелы в горизонтальной плоскости, затем записывается конечное положение точки в горизонтальной плоскости, в которую конец стрелы придет в итоге после перемещения конца стрелы, направление соединительной линии от начальной точки к конечной точке служит в качестве положительного направления оси X, в соответствии с чем устанавливается прямоугольная система координат. После установки системы координат перемещение пропорционального рычага управления устройства дистанционного управления в основном направлении перемещения, соответствующем оси X, соответствует перемещению конца стрелы параллельно оси X плоскости прямоугольной системы координат, перемещение пропорционального рычага управления устройства дистанционного управлений в основном направлении регулирования, соответствующем оси Y, соответствует перемещению конца стрелы параллельно оси Y плоскости прямоугольной системы координат.
Предпочтительно, устройство дистанционного управления имеет переключатель выбора обучающего режима, при этом, когда обучающий режим выбран переключателем выбора обучающего режима, начинается запись положения горизонтальной плоскости, в которой расположен конец стрелы, с тем чтобы задать прямоугольную систему координат.
Предпочтительно, на транспортном средстве, на котором установлена стрела, закреплен приемник, который используется для получения команды дистанционного управления, переданной от устройства дистанционного управления, и преобразования полученной команды дистанционного управления в выходной поток управляющих сигналов.
Предпочтительно, приводной механизм представляет собой гидроцилиндр и гидромотор, управляемые электрическим пропорциональным клапаном.
Предпочтительно, блок управления включает в себя:
блок раскладывания команды по параметру для приема потока сигналов управления, выходящего из приемника и раскладывания потока сигналов управления в код команды, соответствующий команде управления, переданной от механизма управления на устройство дистанционного управления;
блок вычисления фактического положения для получения данных об измеренной величине углов, выдаваемых блоком измерения углов, и для вычисления на основании указанных данных информации о положении стрелы;
блок планирования перемещения для получения кода команды, выдаваемого блоком раскладывания команды по параметру и информации о положении стрелы, выдаваемой блоком вычисления фактического положения, с тем чтобы вычислить величину перемещения каждой секции стрелы и поворотной платформы, необходимую для перемещения конца стрелы в целевое положение и удержания его на данной прямой линии или плоскости, причем указанная величина перемещения служит в качестве плана перемещения;
блок управления потоком для получения плана перемещения, выдаваемого блоком планирования перемещения, и выдачи управляющего напряжения или управляющего тока, управляющих каждой секцией стрелы и поворотной платформой на основании выданного плана перемещения;
блок питания привода для приема управляющего напряжения или управляющего тока, соответствующих каждой секции стрелы и поворотной платформе, выдаваемых блоком управления потоком, и генерации напряжения питания соответствующей величины на основании управляющего напряжения или управляющего тока, с тем чтобы управлять величиной и направлением открытия электрического пропорционального клапана и далее управлять движением штока гидроцилиндра, а также поворотом гидромотора в положение, определенное планом перемещения.
Предпочтительно, информация о положении стрелы, вычисленная блоком вычисления фактического положения, включает в себя координаты положения концов каждой секции стрелы и конца стрелы.
Предпочтительно, когда блок планирования перемещения планирует перемещение, целевое положение первоначально получается следующим образом: на основании компонента по оси X и компонента по оси Y команды управления перемещением в принятом коде команды вычисляется направление перемещения конца стрелы; на основании направления перемещения и предварительно заданного параметра длины шага получается целевое положение конца стрелы путем добавления длины шага к текущему положению конца стрелы в указанном направлении перемещения.
Предпочтительно, блок управления потоком корректирует выход управляющего напряжения или управляющего тока, соответствующих каждой секции стрелы и поворотной платформе, на основании получаемой в режиме реального времени информации о положении стрелы, чтобы гарантировать, что конец стрелы перемещается в горизонтальной плоскости.
Предпочтительно, угол наклона пропорционального рычага управления на устройстве дистанционного управления соответствует скорости перемещения, при этом блок управления потоком корректирует выход управляющего напряжения или управляющего тока в соответствии со скоростью перемещения.
Предпочтительно, блок управления потоком вычисляет разницу между скоростью перемещения конца стрелы и скоростью перемещения команды на основании получаемой в режиме реального времени информации о положении стрелы, в соответствии с чем корректирует выход управляющего напряжения или управляющего тока, соответствующих каждой секции стрелы и поворотной платформе, чтобы осуществить синхронное управление перемещением стрелы.
Предпочтительно, после получения плана перемещения, блок управления потоком вначале оценивает приемлемость плана перемещения, если план перемещения является приемлемым, он генерирует управляющее напряжение или управляющий ток, а если план перемещения является неприемлемым, он требует от блока плана перемещения перепланировать перемещение.
Предпочтительно, оценка блоком управления потоком приемлемости плана перемещения включает в себя оценку непрерывности перемещения каждой секции стрелы и поворотной платформы относительно текущего положения, при этом, если перемещение является непрерывным, план перемещения является приемлемым, а если перемещение не является непрерывным, план перемещения является неприемлемым.
Предпочтительно, устройство дистанционного управления включает в себя переключатель режима управления для выбора режима управления, которым может быть режим управления в прямоугольной системе координат, режим управления в цилиндрической системе координат или режим ручного управления.
Предпочтительно, устройство дистанционного управления дополнительно имеет пропорциональный рычаг управления для управления подъемом и опусканием конца стрелы, с тем, чтобы управлять перемещением конца стрелы вверх или вниз по оси Z.
Предпочтительно, блок питания привода формирует напряжение питания или ток питания с помощью широтно-импульсной модуляции (ШИМ) или тока, в частности используя принятое управляющее напряжение или управляющий ток, чтобы управлять шириной прямоугольного импульса или управлять силой тока, чтобы получить желаемое напряжение питания или ток питания.
Предпочтительно, блок управления дополнительно включает в себя дисплейный блок обратной связи для устройства дистанционного управления, причем данный блок передает информацию, интересную для оператора, на приемник, закрепленный на транспортном средстве, и приемник передает ее на устройство дистанционного управления в виде радиоволны, при этом устройство дистанционного управления имеет жидкокристаллический дисплей, чтобы показать полученную информацию обратной связи.
Предпочтительно, устройство дистанционного управления имеет пропорциональный рычаг управления для управления перемещением каждой секции стрелы и поворотной платформой и пропорциональный рычаг управления для управления перемещением конца стрелы вверх и вниз по оси Z.
Предпочтительно, данные между приемником, блоком управления и блоком измерения угла передаются через шину локальной сети контроллеров.
Предпочтительно, устройство дистанционного управления имеет переключатель поворота координат для поворота установленной системы координат на определенный угол в горизонтальной плоскости.
В отличие от предшествующего уровня техники интеллектуальное устройство управления стрелой согласно настоящему изобретению предлагает режим управления при прямоугольной системе координат.
При данном режиме управления оператор передает команду управления перемещением, включающую компонент по оси X и компонент по оси Y на плоскости, параллельной горизонтальной плоскости, и компонент по оси Z в вертикальном направлении, используя дистанционное управление, и затем блок управления управляет стрелой, чтобы переместить ее в направлении, указанном командами управления перемещением в прямоугольной системе координат на основании текущего положения конца стрелы и команды управления перемещением. Так как перемещение планируется в прямоугольной системе координат, управление прямолинейным перемещением может быть проведено интуитивно. Согласно настоящему изобретению может быть получена прямолинейная траектория перемещения в горизонтальной плоскости.
С устройством управления, предлагаемым настоящим изобретением, для оператора становится возможным легко выполнить прямолинейное управление траекторией перемещения конца стрелы, что особенно подходит для случаев, требующих чтобы траектория перемещения конца стрелы представляла собой прямую линию, например в автобетононасосе и т.п.
Краткое описание чертежей
Фиг.1 представляет собой схематичный чертеж, показывающий стрелу, управление которой будет осуществляться в настоящем изобретении;
Фиг.2 представляет собой устройство управления стрелой согласно предшествующему уровню техники;
Фиг.3 представляет собой процесс формирования траектории перемещения в режиме цилиндрической системы координат согласно предшествующему уровню техники;
Фиг.3а представляет собой проекцию конца стрелы в начальном положении;
Фиг.3b представляет собой требуемую траекторию перемещения конца стрелы;
Фиг.3с представляет собой траекторию перемещения конца N стрелы в режиме цилиндрической системы координат;
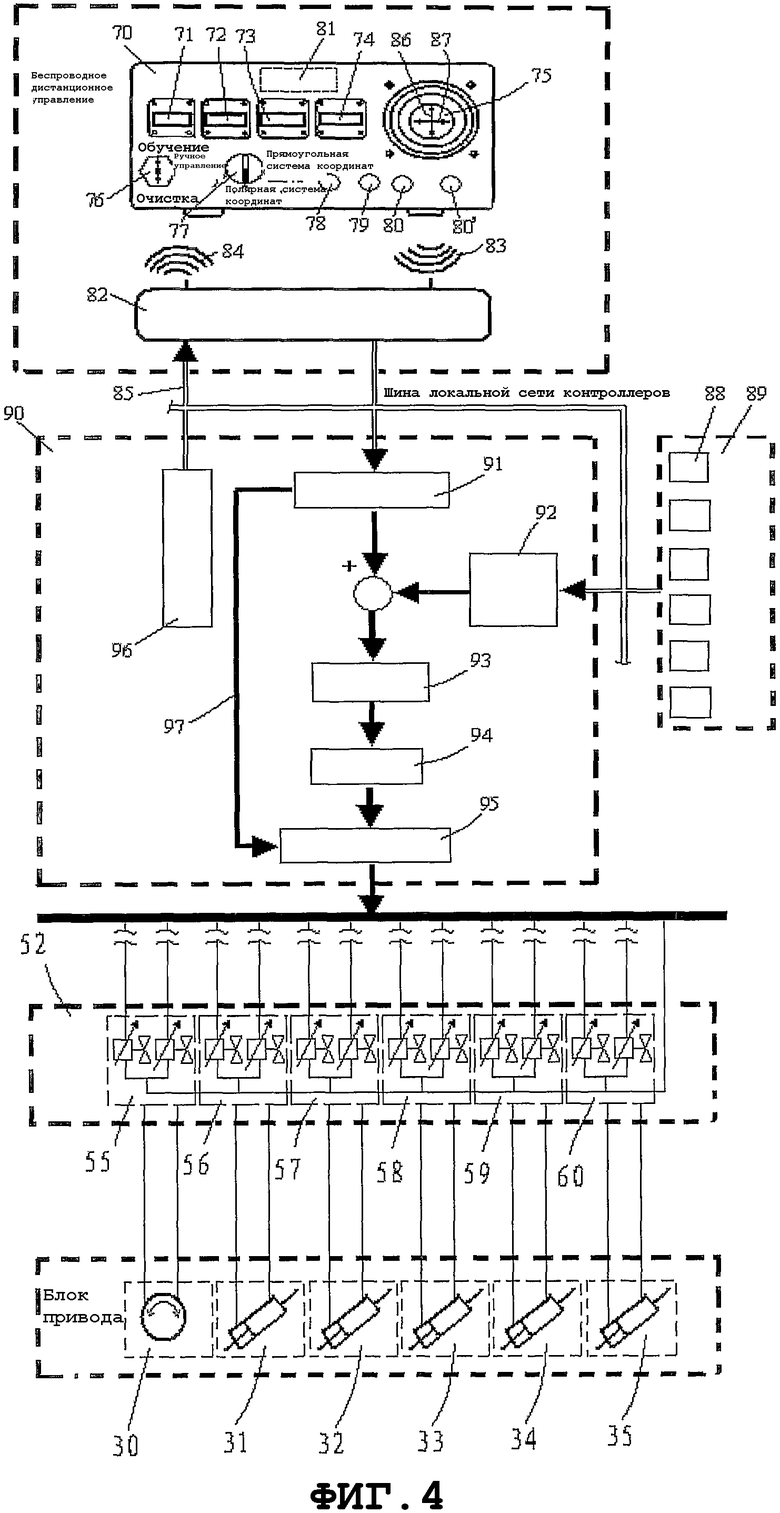
Фиг.4 представляет собой принципиальную структурную схему интеллектуального устройства управления стрелой согласно первому варианту осуществления настоящего изобретения;
Фиг.5 представляет собой процесс установки прямоугольной системы координат способом центрирования согласно первому варианту осуществления настоящего изобретения;
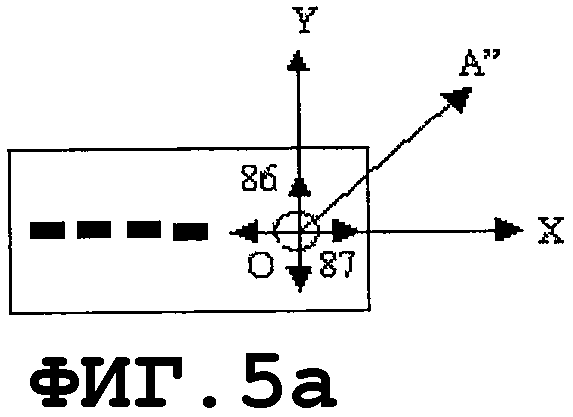
Фиг.5а представляет собой прямоугольную систему координат, установленную для пропорционального рычага управления;
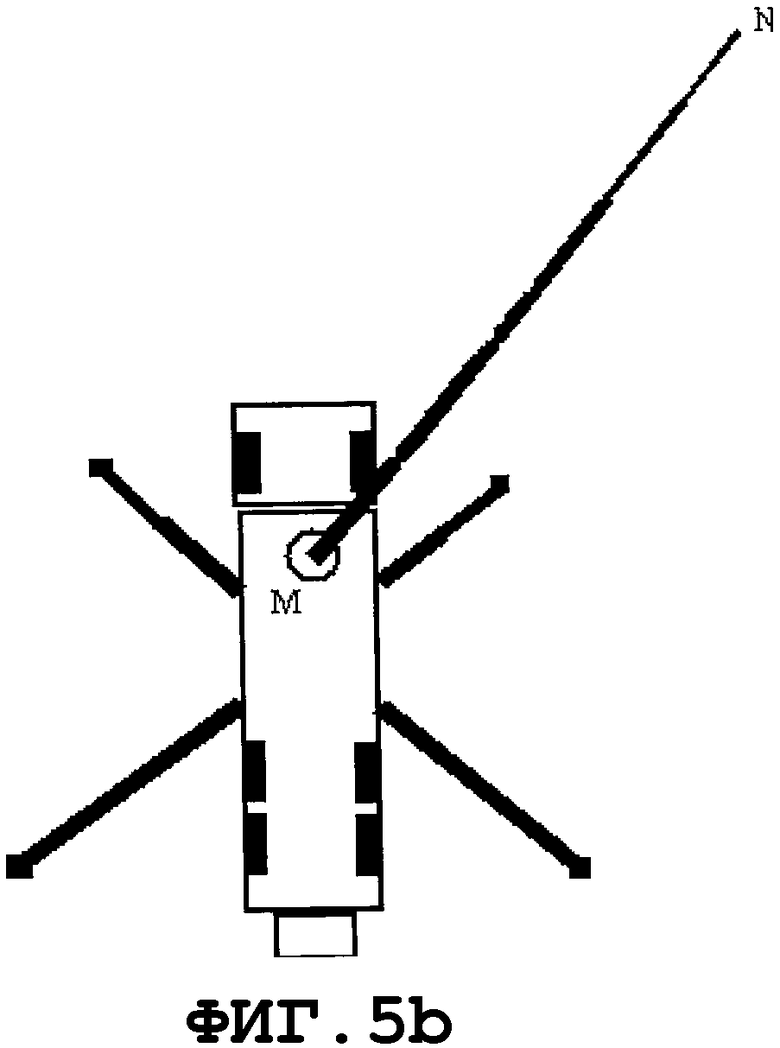
Фиг.5b представляет собой проекцию стрелы на горизонтальную плоскость, когда пропорциональный рычаг управления установлен в центральном положении;
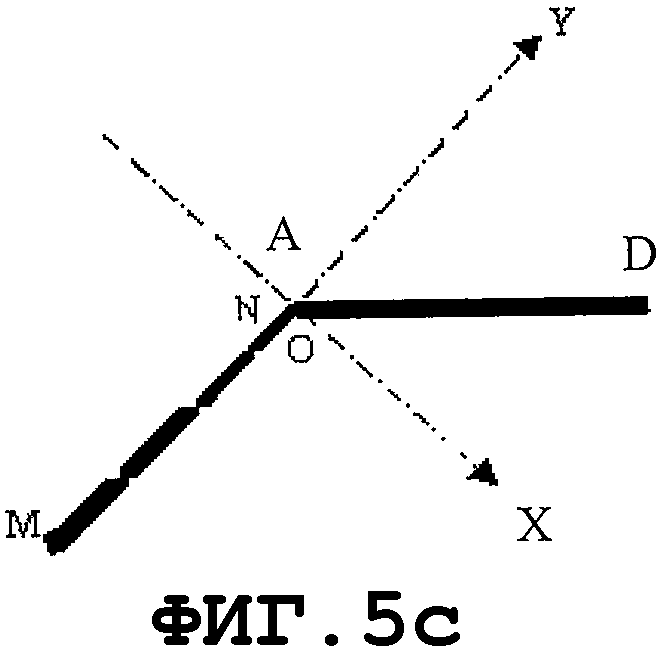
Фиг.5с представляет собой прямоугольную систему координат, установленную в горизонтальной плоскости конца стрелы в положении стрелы, описанной выше;
Фиг.5d представляет собой схематичный чертеж, иллюстрирующий направление наклона пропорционального рычага управления;
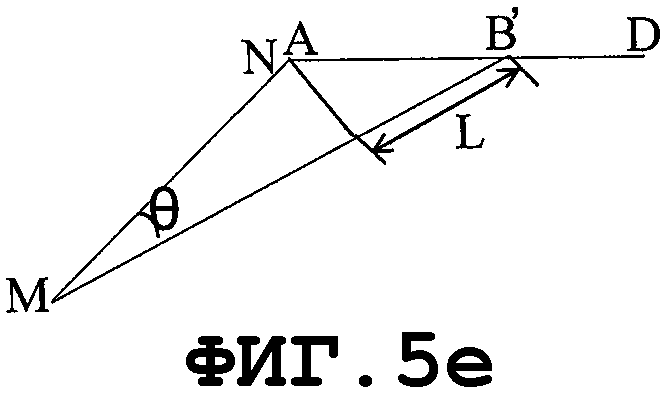
Фиг.5е представляет собой схематичный чертеж, иллюстрирующий определение траектории перемещения, когда конец стрелы перемещается по прямой линии в прямоугольной системе координат;
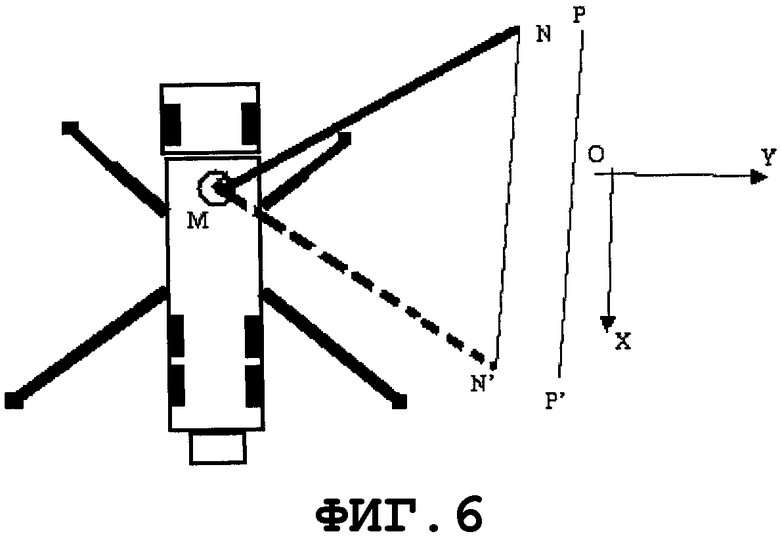
Фиг.6 представляет собой схематичный чертеж, иллюстрирующий как интеллектуальное устройство управления стрелы согласно первому варианту осуществления настоящего изобретения устанавливает прямоугольную систему координат обучающим способом.
Подробное описание предпочтительных вариантов осуществления
Далее будет описан вариант осуществления интеллектуального устройства управления стрелой, предлагаемого изобретением для конструкции стрелы автобетононасоса, показанной на Фиг.1. Конструкция стрелы автобетононасоса была описана выше и поэтому не будет здесь описываться снова. Так как ключевая задача, решаемая настоящим изобретением, заключается в управлении перемещением стрелы в горизонтальной плоскости, последующее описание будет главным образом сфокусировано на управлении перемещением стрелы в горизонтальной плоскости. Управление подъемом и опусканием стрелы в вертикальной плоскости не будет описано здесь подробно, так как оно является более простым, чем управление перемещением в горизонтальной плоскости.
На Фиг.4 показана принципиальная структурная схема интеллектуального устройства управления стрелой согласно первому варианту осуществления настоящего изобретения.
Как показано на Фиг.4, данное интеллектуальное устройство управления стрелой включает в себя устройство 70 дистанционного управления, приемник 82, закрепленный на автобетононасосе, блок 89 измерения угла, блок 90 управления.
Устройство 70 дистанционного управления включает в себя пять пропорциональных рычагов 71-75 управления, причем каждый из пропорциональных рычагов 71-75 управления имеет основное направление регулирования, вдоль которого он может перемещаться вперед или назад, и пропорциональный рычаг управления 75 имеет два основных направления регулирования, вдоль которых он может перемещаться вперед-назад и влево-вправо соответственно, чтобы передавать сигнал управления. Далее, устройство 70 дистанционного управления имеет переключатель 77 выбора режима работы, который выполнен в виде самофиксирующегося селекторного переключателя с тремя рабочими положениями, соответствующими различным режимам работы, включающим в себя ручной режим работы, режим работы в цилиндрической системе координат и режим работы в прямоугольной системе координат. Дополнительно устройство 70 дистанционного управления имеет несколько других механизмов управления. Сигнал управления, генерируемый при манипулировании механизмом управления, например, пропорциональными рычагами управления, соответствующим образом генерирует беспроводной сигнал 83 дистанционного управления и затем передает его.
На автобетононасосе закреплен приемник 82 для приема беспроводного сигнала 83 дистанционного управления, переданного от устройства 70 дистанционного управления, преобразования его в поток сигналов управления, который затем передается на блок 90 управления через шину 85 данных локальной сети контроллеров (CAN). Так как необходимо передавать много сигналов управления, для передачи информации используется шина локальной сети контроллеров, которая с одной стороны эффективно уменьшает затухание сигнала по длине электрического провода, а с другой стороны уменьшает вес пучка электрических проводов.
Блок 89 измерения угла включает в себя шесть угловых датчиков 88 для измерения углов между соответствующими секциями стрелы, угла между первой стойкой и рамой машины, а также угла поворота поворотной платформы, отсчитываемого от центрального положения, в котором стрела расположена, когда находится в убранном состоянии, и передачи вышеуказанных измеренных величин углов на блок 90 управления.
На Фиг.4 также показан электрический пропорциональный многоходовой клапан 52 и блок 53 привода, конструкция и принцип работы которых аналогичны блоку привода, показанному на Фиг.2 и описанному выше. Идентичные элементы обозначены теми же ссылочными позициями и не будут описаны повторно.
Блок 90 управления принимает поток сигналов управления, переданный от приемника 82, и измеренную величину угла, переданную от блока 89 измерения угла через шину 85 данных локальной сети контроллеров, затем проводит вычисление на основании вышеуказанных данных, чтобы сгенерировать напряжение питания для управления гидромотором и гидроцилиндрами в блоке 53 привода. Блок 90 управления преобразует команды управления в напряжение питания, которое является основным для стрелы, чтобы осуществлять перемещение согласно желаемой траектории перемещения.
Блок 90 управления включает в себя следующие подблоки: блок 91 раскладывания команды по параметру, блок 92 вычисления фактического положения, блок 93 планирования перемещения, блок 94 управления потоком и выходной блок 95 ШИМ (с широтно-импульсной модуляцией) напряжения. Подблоки, входящие в состав блока 90 управления, могут быть воплощены или в виде программных модулей или в виде аппаратных модулей.
Блок 91 раскладывания команды по параметру получает поток сигналов управления, передаваемый через шину 85, и раскладывает его на распознаваемые коды команды, которые соответствуют положениям механизмов управления, например переключателей выбора и рычага управления устройства 70 дистанционного управления. Коды команды, относящиеся к технической задаче, решаемой настоящим изобретением, включают в себя режим работы, направление наклона и величину перемещения рычага управления в устройстве дистанционного управления, команду обучения и очистки, а также другие коды команды, включающие в себя состояние фиксации стрелы и поворотной платформы. Фактически направление наклона и величина перемещения рычага управления представляют команды управления перемещением, такие как направление перемещения и скорость конца стрелы. В режиме полярных координат или режиме прямоугольных координат блок 91 раскладывания команды по параметру распознает полученные в режиме реального времени данные, переданные от устройства 70 дистанционного управления, и раскладывает их на различные коды команды, описанные выше, затем передает коды на блок 93 планирования перемещения как входные параметры блока 93 планирования перемещения. В режиме ручного управления команда управления для определенной секции стрелы непосредственно передается на выходной блок 95 ШИМ напряжения.
Блоки 92 вычисления фактических положений используются для получения данных об измеренных величинах углов, выдаваемых блоком 89 измерения угла через шину 85 данных локальной сети контроллеров, и вычисления информации о фактическом положении стрелы 9 в соответствии с указанными расчетными данными. Информация о положении содержит информацию, относящуюся к ходу штоков гидроцилиндров 31-35, и координаты положения концов каждой секции стрелы, включая конец стрелы, которые вычисляются в соответствии с соотношением между сторонами и углами произвольного квадрата после получения угла перемещения каждой секции стрелы, и результат вычисления передается на блок 93 планирования перемещения.
Блок 93 планирования перемещения используется для приема кода команды, выдаваемого блоком 91 раскладывания команды по параметру, и информации о фактическом положении стрелы 9, вычисленной блоком 92 вычисления фактического положения и содержащей фактические положения концов каждой секции стрелы, чтобы вычислить целевое положение. Координаты целевого положения получаются путем добавления к текущему положению конца стрелы предварительно заданного шага 20 в направлении перемещения, указанном командой управления перемещением от пропорционального рычага управления. На основании целевого положения вычисляются состояние фиксации между каждой секцией стрелы 9 и поворотной платформой 11, и текущее положение каждой секции стрелы 9 и поворотной платформы 11, направление и величина перемещения каждой секции стрелы 9 и поворотной платформы 11, необходимые для получения последующей желаемой траектории перемещения. Блок 93 планирования перемещения может нуждаться в планировании перемещения при следующих ограничивающих условиях, включающих в себя: первая стойка 12 зафиксирована, первая и вторая стойки 12 и 13 зафиксированы, поворотная платформа зафиксирована, ни одна из секций стрелы 9 не зафиксирована, и поворотная платформа включена в управление по прямоугольной координате. Результат, вычисленный блоком 93 планирования перемещения, выдается на блок 94 управления потоком. Блок 93 планирования перемещения выполнят функцию определения направления и траектории перемещения конца 20 стрелы и раскладывания перемещения конца 20 стрелы на перемещение секций 12-16 стрелы и поворотной платформы 11. Направление и траектория перемещения конца 20 стрелы определятся согласно команде управления перемещением, переданной оператором через устройство 70 дистанционного управления, и текущему режиму работы устройства управления.
План перемещения, получаемый блоком 93 планирования перемещения, должен гарантировать желаемое перемещение стрелы, например перемещение конца 20 стрелы в плоскости, параллельной горизонтальной плоскости.
Блок 94 управления потоком используется для получения плана перемещения, выдаваемого блоком планирования перемещения, и оценки приемлемости плана перемещения. Если будет решено, что план перемещения является приемлемым и выполнимым, план перемещения будет использован как базис, на основании которого осуществляется управление распределением потока рабочей жидкости приводных механизмов для каждой секции стрелы и поворотной платформы, в соответствии с чем блок 94 управления потоком выдает управляющее напряжение или управляющий ток для каждого механизма перемещения. Указанные управляющее напряжение или управляющий ток определяют величину и направление открытия каждого клапана управления в электрическом пропорциональном многоходовом клапане 52. Тем самым определяются направление и величина потока рабочей жидкости, распределяемые в гидроцилиндр каждой секции стрелы и гидромотор поворотной платформы. Направление потока определяет, в каком направлении, выдвижения или втягивания, будет двигаться шток гидроцилиндра, и в каком направлении, прямом или обратном, будет поворачиваться гидромотор, а величина потока определяет скорость перемещения гидроцилиндра и поворотной платформы. Взаимодействие между каждой секцией стрелы и поворотной платформой определяет траекторию перемещения конца стрелы. Оценка, является ли план перемещения приемлемым, включает оценку, не превышает ли сумма подачи рабочей жидкости для каждого приводного элемента максимальную для клапана в целом подачу рабочей жидкости, чтобы избежать ситуации, когда желаемое перемещение не может быть реализовано. Если подача рабочей жидкости превышает максимальную для клапана в целом, блок 94 контроля потока может уменьшить в одинаковой пропорции подачу рабочей жидкости для каждого приводного элемента, чтобы реализовать нормальное движение. Оценка, является ли план перемещения приемлемым, далее включает оценку непрерывности перемещения каждой секции стрелы и поворотной платформы 11 по отношению к текущему положению. Термин «непрерывность» означает, что не имеется разрыва в перемещении каждой секции стрелы и поворотной платформы 11 по отношению к текущему положению, т.е. нет чрезмерных колебаний движения между смежными периодами времени, чтобы избежать неравномерного перемещения. Если будет решено, что перемещение удовлетворяет требованию непрерывности, план перемещения является приемлемым; если будет решено, что перемещение не удовлетворяет требованию непрерывности, план перемещения является неприемлемым. Скорость перемещения конца 20 стрелы выдерживается соответствующей величине перемещения пропорционального рычага управления посредством блока 94 управления потоком, т.е. скорость медленная, когда величина перемещения мала, и скорость быстрая, когда величина перемещения велика. Далее, блок 94 управления потоком может получить фактическое положение стрелы, основанное на измеренной величине фактического положения стрелы, и таким образом получить фактическую траекторию перемещения конца стрелы, в соответствии с чем корректировать управляющее напряжение или управляющий ток, чтобы выполнить сервоуправление. Кроме того, блок 94 управления потоком может также получить информацию о скорости перемещения конца 20 стрелы, основанную на изменении положения стрелы в единицу времени, в соответствии с чем корректировать управляющее напряжение или управляющий ток, чтобы выполнить синхронное управление стрелой.
Посредством указанных блока 93 планирования перемещения и блока 94 управления потоком, перемещение в режиме цилиндрических координат и режиме прямоугольных координат может быть осуществлено с взаимодействием секций стрелы и поворотной платформы.
Выходной блок 95 ШИМ напряжения используется для получения управляющего напряжения или управляющего тока для каждой секции стрелы, а также поворотной платформы 11, выдаваемых блоком 94 управления потоком, или непосредственного получения параметров команды, выдаваемых блоком 91 раскладывания команды по параметру, и генерирования ШИМ напряжения питания или тока питания для приведения в действие электрических пропорциональных клапанов 56-60 в соответствии с командой, чтобы привести в действие и управлять электрическими пропорциональными клапанами 55-60, и, таким образом, управлять движением штоков гидроцилиндров 31-35, а также вращением гидромотора 30. Перемещение штоков гидроцилиндров 31-35 заставляет связанные с ними секции стрелы поворачиваться вокруг осей шарниров, и вращение гидромотора 30 также заставляет с помощью редуктора стрелу 9 в целом поворачиваться вокруг вертикальной оси 18. В результате поворота всех секций стрелы совместно с поворотом стрелы 9 в целом конец 20 стрелы следует траектории перемещения, желаемой оператору.
Вышеуказанное интеллектуальное устройство управления стрелой имеет три режима управления, включающих режим ручного управления, режим управления в цилиндрической системе координат, режим управления в прямоугольной системе координат. Режим управления выбирается посредством ступенчатого переключения переключателя 77 режима работы.
При режиме ручного управления блок 91 раскладывания команды по параметру раскладывает сигналы, полученные от пропорциональных рычагов управления, в сигналы, соответствующие управляемым элементам. Т.е. сигналы от пропорциональных рычагов 71-74 управления соответствуют секциям 12-15 стрелы, первое основное направление 86 регулирования (рычаг управления наклонен вперед или назад) пропорционального рычага 75 управления соответствует секции 16 стрелы, и второе основное направление 87 регулирования (рычаг управления наклонен влево или вправо) пропорционального рычага 75 управления соответствуют поворотной платформе 11. Разложенные сигналы управления передаются на выходной блок 95 ШИМ сигнала, который генерирует ШИМ напряжение питания, чтобы привести в действие электрический пропорциональный многоходовой клапан 52, через разветвленную цепь 97. Управление в режиме ручного управления аналогично управлению при предшествующем уровне техники, показанном на Фиг.2. Режим ручного управления используется в ситуации, когда согласованный способ работы стрелы не годится, или имеется поломка в системе, осуществляющей согласованный способ работы. Направления наклона указанных пропорциональных рычагов управления соответствуют направлению перемещения секций стрелы или поворотной платформы. Величины перемещения указанных пропорциональных рычагов управления соответствуют скорости перемещения секции стрелы или поворотной платформы. Чем больше величина перемещения пропорционального рычага, тем больше скорость перемещения секции стрелы или поворотной платформы.
Указанный режим управления в цилиндрической системе координат по существу аналогичен описанному в заявке на патент Германии DE-A-4306127 компании Putzmeister, т.е. цилиндрическая система координат имеет три координаты: ψ, r и h (см. Фиг.1). Данный вариант осуществления изобретения отличается от решения компании Putzmeister тем, что исходя из конструкции рычага управления, имеющегося на устройстве дистанционного управления в данном варианте осуществления, регулирование координаты r соответствует первому основному направлению 86 регулирования рычага 75 управления, т.е. наклон вперед или назад рычага 75 управления соответствует увеличению или уменьшению координаты r, что представляет собой перемещение стрелы в направлении удлинения или укорачивания, в то время как высота h конца стрелы остается неизменной. В то же время регулирование координаты ψ соответствует второму основному направлению 87 регулирования рычага 75 управления, т.е. наклон влево или вправо рычага 75 управления соответствует увеличению или уменьшению координаты ψ, что представляет собой поворот поворотной платформы по часовой стрелке или против часовой стрелки. Как 2-координатное перемещение в горизонтальной плоскости подгруппы регулирующего действия регулирование данных двух координат объединено в рычаге управления, имеющем два основных направления регулирования. Если угол наклона рычага 75 управления определяется углом относительно указанных основных направлений регулирования, то и обе координаты r и ψ участвуют в перемещении конца стрелы, тем самым стрела выполняет комбинацию удлинения или укорачивания и поворота, в то время как высота h конца стрелы остается неизменной. Регулирование высоты h конца стрелы осуществляется отдельным рычагом 71 управления и не зависит от перемещения конца стрелы в горизонтальной плоскости. Наклон вперед рычага управления увеличивает высоту h, а наклон назад уменьшает высоту h. Вышеописанные функции реализованы путем взаимодействия блока 92 вычисления фактического положения, блока 93 планирования перемещения, блока 94 управления потоком и выходного блока 95 ШИМ напряжения или т.п.в блоке 90 управления.
При режиме управления в цилиндрической системе координат блок 93 планирования перемещения определяет, будет ли стрела 9 удлиняться или укорачиваться, просто в соответствии с направлением перемещения, вперед или назад, рычага 75 управления в основном направлении регулирования, в соответствии с чем вычисляется последующая траектория перемещения стрелы. На Фиг.3с показана характерная траектория перемещения конца стрелы при режиме управления в цилиндрической системе координат. Как показано на Фиг.3с, сформированная в конечном итоге траектория перемещения конца стрелы представляет собой кривую линию.
При режиме управления в цилиндрической системе координат планирование перемещения является относительно простым, так как поворот стрелы относится только к движению поворотной платформы 11, которое не имеет никакой соответствующей взаимосвязи с координатой, и никакого специального вычисления не требуется. При планировании перемещения требуется только разложить перемещение по координате r, в сторону выдвижения или втягивания, на перемещение каждой секции стрелы. Никакого планирования для поворотной платформы не требуется.
Основной недостаток вышеупомянутого режима управления в цилиндрической системе координат был описан выше, т.е. при данном режиме управления в цилиндрической системе координат, хотя и удобно перемещать конец стрелы из одной точки в другую в горизонтальной плоскости, траектория перемещения между двумя точками представляет собой кривую линию. Невозможно сформировать прямолинейное перемещение из одной точки в другую в той же горизонтальной плоскости, если стрела не совершает только перемещение по координате r, в сторону выдвижения или втягивания, без поворотного перемещения. Никакого прямолинейного перемещения не может быть получено, если поворот имеет место.
Режим управления в прямоугольной системе координат является уникальным режимом работы. Принимая во внимание, что прямолинейное перемещение является основным способом перемещения, требуемым при выполнении укладки, в данном варианте осуществления разработан принципиально новый режим управления в прямоугольной системе координат для устройства управления. При данном режиме управления в прямоугольной системе координат становится возможным получить прямолинейное перемещение из одной точки в другую в той же горизонтальной плоскости, т.е. траектория перемещения является прямой линией. Соответственно данный режим работы особенно подходит для укладки цемента при строительстве.
Режим управления в прямоугольной системе координат вводит ортогональные ось X и ось Y, которые отличаются от координат ψ и r цилиндрической системы координат, а также ось Z, которая аналогична оси h цилиндрической системы координат и не будет описана подробно. Как показано на Фиг.5а, первое основное направление 86 регулирования (направление вперед и назад) пропорционального рычага 75 управления определяется как продольная ось Y, и второе основное направление 87 регулирования (направление влево и вправо) определяется как горизонтальная ось X. Эти определения задают взаимоотношение между основными направлениями регулирования рычага 75 управления и прямоугольной системой координат. Когда рычаг 75 управления наклонен в сторону направления регулирования, иного, чем основные направления регулирования, компоненты перемещения по двум основным направлениям регулирования являются командами перемещения по оси X и оси Y соответственно.
Направления оси X и оси Y прямоугольной системы координат на устройстве 70 дистанционного управления задать очень легко, так как основные направления регулирования рычага 75 управления фиксированы. Однако направление оси X и направление оси Y прямоугольной системы координат на горизонтальной плоскости, в которой конец стрелы перемещается, задать очень трудно, так как для этого нужна система отсчета. Данный вариант осуществления, исходя из требований к нему, предлагает два способа задания прямоугольной системы координат, в которой конец стрелы перемещается в горизонтальной плоскости, т.е. центрирующий способ и обучающий способ пропорционального рычага 75 управления.
Центрирующий способ пропорционального рычага 75 управления означает, что прямоугольная система координат горизонтальной плоскости перемещения стрелы задается в соответствии с положением стрелы, когда пропорциональный рычаг 75 управления расположен в центре. Так называемый «центр» означает, что пропорциональный рычаг 75 управления расположен в центральном положении обоих основных направлений регулирования.
Как было упомянуто выше, перемещение пропорционального рычага 75 управления вызывает ответную реакцию в блоке 90 управления. В случае, когда прямоугольная система координат задана центрирующим способом, устройство 90 управления рассматривает центрирование пропорционального рычага 75 управления как особый случай, т.е. считает центрирование пропорционального рычага 75 управления в качестве точки раздела, до и после, между двумя процессами управления. Когда пропорциональный рычаг 75 управления центрирован, предыдущий процесс управления заканчивается, и начинается следующий процесс, и это требует установить новую прямоугольную систему координат.
Новая прямоугольная система координат может быть установлена следующим образом: когда пропорциональный рычаг 75 управления центрирован, поворотная платформа используется в качестве начала отсчета координат, и направление, в котором стрела выдвигается, используется в качестве положительного направления оси Y. Как показано на Фиг.5b, когда пропорциональный рычаг 75 управления центрирован, проекция стрелы на горизонтальную плоскость - MN. Когда рычаг 75 управления оказывается в центральном положении в следующий раз, система координат перемещения стрелы, которая соответствует системе координат, заданной пропорциональным рычагом 75 управления, показанной на Фиг.5а, устанавливается следующим образом: точка N используется в качестве начала отсчета координат системы координат, направление удлинения стрелы используется в качестве направления по оси Y, и направление по оси X далее определяется в соответствии с определенным направлением по оси Y. На Фиг.5с показана прямоугольная система координат, заданная на основании положения стрелы, показанной на Фиг.5b.
После того как прямоугольная система координат пропорционального рычага 75 управления и прямоугольная система координат горизонтальной плоскости перемещения стрелы заданы, две прямоугольные системы координат соответствуют друг другу, т.е. направление наклона пропорционального рычага 75 управления в его прямоугольной системе координат указывает направление, в котором конец стрелы должен быть перемещен в прямоугольной системе координат горизонтальной плоскости перемещения стрелы.
Наклон рычага 75 управления от начала отсчета О' координат в точку А', как показано на Фиг.5d, означает, что конец N стрелы требуется переместить из точки А, совпадающей с началом отсчета О координат, в точку D, и скорость перемещения конца N стрелы связана с величиной перемещения пропорционального рычага 75 управления. Чем больше величина перемещения пропорционального рычага 75 управления, тем больше скорость перемещения конца стрелы. В отличие от режима управления в цилиндрической системе координат траектория перемещения из точки А в точку D раскладывается на ось X и ось Y прямоугольной системы координат. Т.е. конец N стрелы перемещается в направлении прямой линии AD и получается прямолинейная траектория перемещения, что требует, чтобы скорость перемещения конца стрелы по оси X была согласована со скоростью перемещения конца стрелы по оси Y, чтобы удержать конец N стрелы перемещающимся в направлении AD.
Блок 93 планирования перемещения определяет направление перемещения стрелы в прямоугольной системе координат на основании направления наклона пропорционального рычага 75 управления. Для того чтобы получить направление перемещения, необходимо планировать перемещение, чтобы гарантировать правильное направление перемещения стрелы и получить прямолинейную траекторию перемещения. Так как и для перемещения стрелы по оси X и для перемещения стрелы по оси Y используется не одно единственное приводное устройство, планирование перемещения в прямоугольной системе координат является в значительной степени сложным.
Так как перемещение конца стрелы раскладывается на перемещение по оси X и перемещение по оси Y в прямоугольной системе координат, блок 93 планирования перемещения должен рассчитать согласование между поворотом стрелы и выдвижением и втягиванием стрелы, чтобы гарантировать, что стрела всегда перемещается в направлении перемещения, заданном командами, вдоль прямой линии. Блок 93 планирования перемещения планирует перемещение следующим образом: сначала вычисляется требуемое направление перемещения на основании величин компонента по оси X и компонента по оси Y команды управления перемещением; затем вычисляется координатное положение, достигаемое после перемещения на предварительно установленный шаг в указанном направлении перемещения из текущего положения, в соответствии с чем планируется требуемое перемещение каждой секции стрелы и поворотной платформы 11, необходимые для достижения этого положения. Также необходимо сохранить высоту конца 20 стрелы неизменной в течение перемещения в плане перемещения. Кроме того, при фактическом перемещении блок 94 управления потоком проверяет план перемещения на непрерывность перемещения и выполняет сервоуправление и синхронизирующее управление. Во время перемещения, если устройство 70 дистанционного управления по-прежнему передает ту же команду управления перемещением, блок 93 планирования перемещения продолжает получать следующее координатное положение, основанное на параметре шага, и планирует следующее перемещение. Параметр шага представляет собой предварительно установленную величину параметра, которая определяет, на какую длину шага блок 93 планирования перемещения будет осуществлять планирование перемещения.
Как показано на Фиг.5е, шаг предполагается равным 1 метру, и требуется переместиться из точки А в точку D. Таким образом, требуется переместиться в точку В', которая расположена на расстоянии 1 метр от точки А. Как известно из Фиг.5е, стрела должна поворачиваться в направлении по часовой стрелке на угол АМВ' (предполагается, что угол равен θ) и стрела должна выдвинуться на длину L (L=MB'-MA). План перемещения, выданный блоком 93 планирования перемещения, используется, чтобы гарантировать, что стрела выдвинется на длину L, и в то же время стрела повернется в направлении по часовой стрелке на угол θ. Чтобы переместиться из точки А в точку D, требуется непрерывно предоставлять следующую точку В', в соответствии с чем блок 93 планирования перемещения может рассчитать серию планов перемещения, которые заставят конец 20 стрелы перемещаться вдоль прямой линии AD. С помощью сервоуправления и синхронизирующего управления блоком 94 управления потоком становится возможным гарантировать, что конец 20 стрелы переместиться в точку D вдоль по существу прямолинейной траектории перемещения.
Центрирующий способ задания прямоугольной системы координат может успешно удовлетворить требование по удержанию перемещения конца стрелы вдоль прямой линии. Однако в этом способе все еще остаются некоторые недостатки. Поэтому данное изобретение также предлагает обучающий способ для задания прямоугольной системы координат в горизонтальной плоскости. Обучающий способ задания прямоугольной системы координат предлагается по следующей причине: в реальных ситуациях укладки бетона, таких как укладка поперечной балки или плоской плиты, конец плиты нужно перемещать только в двух направлениях в горизонтальной плоскости, одно из направлений параллельно поперечной балке, другое направление перпендикулярно поперечной балке в горизонтальной плоскости. Как показано на Фиг.6, предполагается, что требуемым направлением перемещения конца стрелы является перемещение из проекционной точки N в проекционную точку N' в горизонтальной плоскости. Точки N и N' - это две различные точки поперечной балки, которая является целью укладки. Положение точек N и N' может быть записано блоком управления, когда конец стрелы расположен в двух точках, чтобы затем задать прямоугольную систему координат перемещения стрелы посредством соединяющей линии между двумя точками. Далее система координат будет оставаться неизменной в этой рабочей ситуации и формирует фиксированную прямоугольную систему координат. После того как фиксированная прямоугольная система координат была задана, перемещение пропорционального рычага 75 управления во втором основном направлении 87 регулирования - это прямолинейное перемещение, параллельное прямой линии NN', например РР', показанное на Фиг.6. Также перемещение пропорционального рычага 75 управления в первом основном направлении 86 регулирования - это прямолинейное перемещение, перпендикулярное прямой линии NN'. Даже когда рычаг управления будет перемещаться снова после центрирования, он все равно сохранит эту зависимость, т.е. система координат не изменится из-за изменения положения стрелы, пока координаты двух точек N и N' не будут очищены.
Чтобы получить данную функцию, устройство 70 дистанционного управления согласно данному варианту осуществления имеет специальный переключатель 76 выбора обучающего режима, как показано на Фиг.4. Предпочтительно, переключатель 76 выбора обучающего режима содержит переключатель с автоматическим сбросом, имеющий три положения, который находится в центральном положении без внешней силы, находится в переднем положении, обозначенном как «обучающий» режим, когда смещается вперед, и находится в заднем положении, обозначенном «очищающий» режим, когда смещается назад. Когда переключать 77 выбора режима работы переведен в режим прямоугольных координат, используется переключать 76 выбора обучающего режима, чтобы послать команду запомнить значения координат определенной точки и команду очистить значения координат определенной точки. Команды затем передаются на блок 90 управления через шину 85 данных локальной сети контроллеров, чтобы быть выполненными блоком 90 управления. Как показано на Фиг.6, после запоминания координат двух точек N и N', направление выдвижения стрелы и направление, перпендикулярное направлению прямой линии NN', определяются как положительное направление оси Y. Удобно определить ось X после того, как ось Y определена. Координаты X и Y в прямоугольной системе координат могут быть получены и зафиксированы с помощью способа запоминания двух точек.
После того как прямоугольная система координат задана обучающим способом, работа блока 90 управления в этой системе координат аналогична тому, когда прямоугольная система координат задана центрирующим способом.
Чтобы получить описанную выше новую функцию, как показано на Фиг.4, блок 90 управления в данном варианте осуществления также содержит дисплейный блок 96 обратной связи для устройства дистанционного управления. Данный блок передает информацию, интересную для оператора, на приемник 82, закрепленный в автомобиле, через шину 85 данных локальной сети контроллеров, соединенную с блоком 90 управления, и затем передает на устройство 70 дистанционного управления, удерживаемое в руке оператора, посредством радиоволны 84 определенной частоты. На жидкокристаллическом дисплее 81, установленном на устройстве 70 дистанционного управления, могут быть отображены графики и текст. Таким образом, оператор может своевременно получить информацию обратной связи, связанную с текущей операцией. Данная функция является дополнительной и не является необходимой для реализации интеллектуального управления.
Кроме того, чтобы можно было легко установить другую прямоугольную систему координат после того, как одна прямоугольная система координат была установлена, специальный переключатель (не показан) для поворота системы координат может быть размешен на устройстве 70 дистанционного управления. После того как прямоугольная система координат была установлена, становится возможным использовать переключатель для поворота системы координат в горизонтальной плоскости на определенный угол. Данный переключатель может облегчить процесс установки новой прямоугольной системы координат на базе установленной прямоугольной системы координат.
В сравнении с предшествующим уровнем техники, вышеуказанный вариант осуществления отличается тем, что устройство управления устанавливает режим управления в прямоугольной системе координат. При данном режиме управления компоненты управления, выдаваемые пропорциональным рычагом управления или другими механизмами управления, раскладываются в соответствии с осями X, Y, Z прямоугольной системы координат, чтобы получить требуемую информацию о направлении перемещения и осуществить планирование и управление перемещением на основании этой информации, в результате получая прямоугольную траекторию перемещения в требуемом направлении. Благодаря установке прямоугольной системы координат становится удобным управлять концом 20 стрелы, чтобы переместить его по прямолинейной траектории перемещения, тем самым требования строительства по укладке бетона или т.п. могут быть достаточным образом удовлетворены. Некоторые технические признаки данного изобретения могут быть реализованы другим образом в соответствии с предшествующим уровнем техники. Например, устройство 70 дистанционного управления может передавать команду управления по проводам; функция пропорционального рычага 75 управления может быть реализована путем непосредственного ввода чисел, указывающих направление перемещения и его скорость; и электрический пропорциональный многоходовой клапан 52 может быть пропорциональным сервоклапаном, сервопропорциональным клапаном или другим электроуправляемым гидроклапаном, что может быть более удобным для осуществления.
Приведенные выше варианты осуществления изобретения должны пониматься как примеры осуществления настоящего изобретения, и специалистами в данной области техники могут быть осуществлены их изменения и модификации, не выходя за пределы объема изобретения, который ограничен исключительно прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ (ВАРИАНТЫ) | 2009 |
|
RU2399576C1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ВОЗДУШНЫМ УСТРОЙСТВОМ И ВОЗДУШНОЕ УСТРОЙСТВО С КОНТРОЛЛЕРОМ, ОСУЩЕСТВЛЯЮЩИМ ЭТОТ СПОСОБ | 2015 |
|
RU2695006C2 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ КОПАЮЩЕГО ПРИСПОСОБЛЕНИЯ (ВАРИАНТЫ) И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОЧЕЙ МАШИНЫ НА РАБОЧЕЙ ПЛОЩАДКЕ (ВАРИАНТЫ) | 1995 |
|
RU2134329C1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ДОБЫЧЕЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ КАРЬЕРНЫМ ЭЛЕКТРИЧЕСКИМ ЭКСКАВАТОРОМ НА ОСНОВЕ ВСПОМОГАТЕЛЬНОГО ЗРЕНИЯ | 2023 |
|
RU2836991C2 |
| ГРУЗОВОЙ АВТОМОБИЛЬ С МНОГООСНЫМ ШАССИ ДЛЯ ТРАНСПОРТИРОВКИ, СНЯТИЯ И ПРИЕМА ШТУЧНЫХ ГРУЗОВ | 2012 |
|
RU2644215C2 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ТРАНСПОРТНЫХ СРЕДСТВ | 1993 |
|
RU2092423C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| СКЛАДНОЙ БАШЕННЫЙ КРАН | 2023 |
|
RU2817662C1 |
Изобретение относится к области строительства, а именно к устройству управления строительной машиной со стрелой. Устройство включает в себя: блок управления и блок измерения угла, блок управления вычисляет информацию о положении стрелы на основании измеренной величины углов, в соответствии с чем корректирует управление различными приводными механизмами. Устройство дополнительно включает в себя устройство дистанционного управления, которое передает команды управления в виде беспроводного дистанционного управления и может обеспечить команды управления перемещением. Команда управления перемещением включает в себя компонент по оси X, компонент по оси Y и компонент по оси Z, используемые в прямоугольной системе координат, причем прямоугольная система координат задана в пространстве, ось X, ось Y и ось Z данной прямоугольной системы координат соответствуют каждому из компонентов по оси в команде управления перемещением устройства дистанционного управления. Когда устройство дистанционного управления передает команду управления перемещением, блок управления определяет направление перемещения конца стрелы в плоскости в соответствии с компонентом по оси X, компонентом по оси Y и компонентом по оси Z принятой команды управления перемещением и раскладывает перемещение на перемещение каждой секции стрелы и поворотной платформы так, что конец стрелы перемещается в направлении, указанном командой управления перемещением. Устройство обеспечивает прямолинейное управление траекторией перемещения конца стрелы. 22 з.п. ф-лы, 6 ил.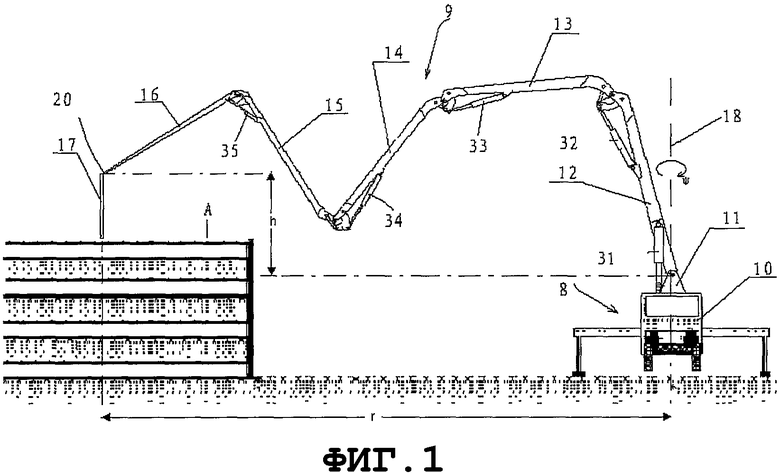
блок раскладывания команды по параметру для приема потока сигналов управления, выходящего из приемника и раскладывания потока сигналов управления в код команды, соответствующий команде управления, переданной от механизма управления на устройстве дистанционного управления; блок вычисления фактического положения для получения данных об измеренной величине углов, выдаваемых блоком измерения углов, и для вычисления на основании указанных данных информации о положении стрелы; блок планирования перемещения для получения кода команды, выдаваемого блоком раскладывания команды по параметру и информации о положении стрелы, выдаваемой блоком вычисления фактического положения, с тем, чтобы вычислить величину перемещения каждой секции стрелы и поворотной платформы, необходимые для перемещения конца стрелы в целевое положение и удержания его на данной прямой линии или плоскости, причем указанная величина перемещения служит в качестве плана перемещения; блок управления потоком для получения плана перемещения, выдаваемого блоком планирования перемещения, и выдачи управляющего напряжения или управляющего тока, управляющих каждой секцией стрелы и поворотной платформой на основании выданного плана перемещения; блок питания привода для приема управляющего напряжения или управляющего тока, соответствующих каждой секции стрелы и поворотной платформе, выдаваемых блоком управления потоком, и генерации напряжения питания соответствующей величины на основании управляющего напряжения или управляющего тока, с тем, чтобы управлять величиной и направлением открытия электрического пропорционального клапана, и далее управлять движением штока гидроцилиндра, а также поворотом гидромотора в положение, определенное планом перемещения.
| US 6862509 В2, 01.03.2005 | |||
| DE 4306127 А1, 01.09.1994 | |||
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1998 |
|
RU2129953C1 |
| DE 10328769 А1, 20.01.2005 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |

