Изобретение относится к измерительной технике и может найти применение в интегральных гироскопах вибрационного типа.
Известен чувствительный элемент планарного инерциального датчика [1], содержащий слоистую структуру стекло-кремний-стекло, причем подвижный узел выполнен из монокремния и состоит из двух рамок: внешней, подвижной, подвешенной к несущей пластине на двух торсионах, и внутренней, подвижной, подвешенной на двух торсионах к внешней. Несущая пластина крепится жестко к неподвижному основанию с помощью электростатической сварки.
Недостатком устройства является низкая точность, обусловленная потерями колебательной энергии рамок, отдаваемой в корпусную пластину.
Наиболее близким к заявляемому изобретению может служить чувствительный элемент микросистемного гироскопа [2], содержащий корпусную кремниевую пластину, симметрично расположенные внутри друг друга и разделенные равномерными зазорами внешнюю и внутреннюю подвижные рамки, при этом внешняя рамка соединена с корпусной кремниевой пластиной посредством первой пары упругих торсионов и одновременно посредством второй пары упругих торсионов соединена с внутренней рамкой, причем продольные слои каждой пары торсионов взаимно перпендикулярны, между корпусной кремниевой пластиной и подвижными рамками образован посредством сквозного анизотропного травления зазор, с одной стороны корпусной кремниевой пластины жестко присоединена изоляционная обкладка с нанесенными на нее неподвижными проводящими электродами силового преобразователя, возбуждающего первичные колебания внутренней рамки, пьезоэлектрические датчики перемещения, расположенные на второй паре упругих торсионов снимают информацию о первичных колебаниях внутренней рамки для подстройки их частоты, а пьезоэлектрические датчики перемещения, расположенные на первой паре упругих торсионов, снимают информацию о вторичных колебаниях внешней и внутренней рамок, которые появляются во время воздействия вдоль оси, перпендикулярной плоскости корпусной кремниевой пластины, переносной угловой скорости.
Недостатком известного устройства является низкая точность, обусловленная тем, что в нем нет полной компенсации момента от кориолисовых сил моментом обратной связи, а также невозможно достижение заданной точности, достигаемой преобладанием жесткости электрической пружины над механической жесткостью упругих торсионов.
Задачей, на решение которой направлено изобретение, является повышение точности микросистемного гироскопа.
Технический результат - компенсирование кориолисова момента и выполнение отношения жесткости электрической пружины к жесткости механического подвеса с заданной величиной, необходимой для достижения точности измерений.
Этот технический результат достигается тем, что в чувствительном элементе микросистемного гироскопа, содержащем корпусную кремниевую пластину, симметрично расположенные внутри друг друга и разделенные равномерными зазорами внешнюю и внутреннюю подвижные рамки, при этом внешняя рамка соединена с корпусной кремниевой пластиной и с внутренней рамкой посредством упругих торсионов, продольные оси каждой пары торсионов взаимно перепендикулярны, между корпусной кремниевой пластиной и подвижными рамками образован посредством сквозного анизотропного травления зазор, на одну сторону корпусной кремниевой пластины жестко присоединена изоляционная обкладка с нанесенными на нее неподвижными проводящими электродами электростатического силового преобразователя, задающего принудительные колебания внутренней рамке, на обе стороны корпусной кремниевой пластины жестко присоединены изоляционные обкладки, на которые нанесены электроды электростатического силового преобразователя, задающего принудительные колебания внутренней рамке, электроды емкостного преобразователя перемещений и электроды силового электростатического преобразователя обратной связи, внешняя подвижная рамка является подвижным проводящим электродом электростатического силового преобразователя обратной связи, компенсирующего момент от действия кориолисовой силы, и подвижным проводящим электродом емкостного преобразователя перемещений.
По сравнению с известным происходит компенсирование кориолисова момента и выполнение отношения жесткости электрической пружины к жесткости механического подвеса с заданной величиной, площадь внешней рамки выполнена по требованию создания момента силовой отработки, достаточного для компенсирования момента кориолисовой силы, возникающей на внутренней рамке, и одновременно момент силовой отработки превосходит момент от сил упругости на величину, достаточную для обеспечения заданной точности.
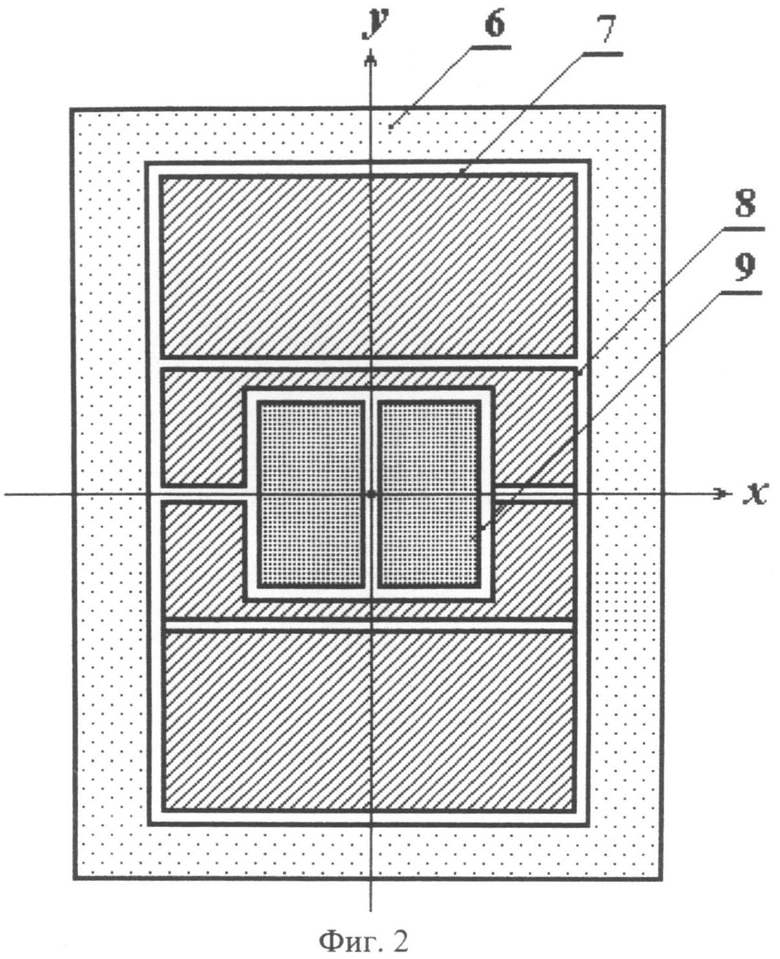
Предлагаемый чувствительный элемент микросистемного гироскопа иллюстрируется чертежами, представленными на фиг.1 и 2. На фиг.1 показан вид в плане подвижного узла чувствительного элемента, а на фиг.2 показана одна из двух изоляционных обкладок с нанесенными на ее поверхности проводящими электродами.
Чувствительный элемент микросистемного гироскопа содержит (фиг.1) корпусную кремниевую пластину 1. Внутри корпусной кремниевой пластины 1 выполнены симметрично расположенные друг в друге подвижные внешняя рамка 2 и внутренняя рамка 3. Внешняя рамка 2 подвешена к корпусной пластине 1 с помощью торсионов 4, а внутренняя рамка 3 подвешена к внешней рамке 2 посредством торсионов 5. Продольные оси каждой пары торсионов 4 и 5 размещены перпендикулярно друг к другу. От корпусной кремниевой пластины 1 внешняя рамка 2, за исключением мест присоединения торсионов 5, отделена сквозными зазорами, получаемыми при анизотропном травлении. Также отделена внутренняя рамка 3 от внешней рамки 2 сквозными зазорами за исключением мест присоединения торсионов 4.
Две одинаковые изоляционные обкладки (фиг.2) крепятся жестко с разных сторон к корпусной кремниевой пластине 1 посредством анодного соединения. Изоляционная обкладка 6 выполнена из ионосодержащего стекла или из непроводящего монокремния. На каждой пластине выполнены методом вакуумного напыления следующие проводящие электроды: электроды 7 электростатического силового преобразователя; электроды 8 емкостного преобразователя перемещений; электроды 9 для возбуждения принудительных колебаний внутренней рамки. Через контактные площадки электроды 7, 8 и 9 включаются соответственно в электрическую схему. Между корпусной кремниевой пластиной 1 и электродами на изоляционной обкладке 6 при их соединении выполняют зазор h. В зависимости от предела измерений микросистемного гироскопа этот зазор выбирают от 5 до 25 микрометров.
Внешняя подвижная рамка 2 в данной конструкции выполняет роль гирочувствительного узла, а внутренняя 3 - функции гиромотора, и приводится в принудительные колебания относительно оси у с помощью электростатического автогенератора. Работа заявляемого устройства осуществляется следующим образом. При отсутствии угловой скорости Ω внутренняя рамка 3 совершает колебательные движения относительно оси у и не имеет их относительно оси х. Кориолисова ускорения при этом не возникает, момент силовой отработки, электростатического силового преобразователя должен превосходить величину упругого момента торсионов на величину обратного значения требуемой суммарной погрешности:

где 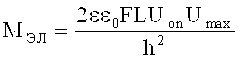

где ω - частота принудительных колебаний внутренней рамки; Ωmax - максимальное значение (предел) измеряемой угловой скорости.
При наличии поворотной скорости Ωz на внешней рамке 2 возникает знакопеременный гироскопический момент, возбуждающий в ней колебания относительно оси х. Частота этих колебаний совпадает с частотой вынужденных колебаний внутренней рамки 3, а амплитуда колебаний является пропорциональной поворотной скорости.
Источники информации
1. Патент США №4598585, МПК G01P 15/02, НКИ 73/505, опубл. 08 июля 1986.
2. Патент США №5488862, МПК G01P 9/04, НКИ 73.504.02, опубл. 06 февраля 1996.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАМЕРТОННЫЙ МИКРОГИРОСКОП | 2014 |
|
RU2580871C1 |
| МИКРОСИСТЕМНЫЙ ГИРОСКОП | 2011 |
|
RU2466354C1 |
| МИКРОГИРОСКОП ПРОФЕССОРА ВАВИЛОВА | 2012 |
|
RU2490592C1 |
| МИКРОАКСЕЛЕРОМЕТР | 2012 |
|
RU2490650C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2400708C1 |
| ИНЕРЦИАЛЬНЫЙ ЭЛЕМЕНТ | 2014 |
|
RU2573616C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОСИСТЕМНОГО АКСЕЛЕРОМЕТРА | 2009 |
|
RU2426134C1 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ ДАТЧИК МАГНИТНОГО ПОЛЯ | 2012 |
|
RU2490754C1 |
| Интегральный микромеханический гироскоп | 2021 |
|
RU2778622C1 |
Изобретение относится к измерительной технике. Чувствительный элемент микросистемного гироскопа содержит корпусную кремниевую пластину, симметрично расположенные внутри друг друга и разделенные равномерными зазорами внешнюю и внутреннюю подвижные рамки, при этом внешняя рамка соединена с корпусной кремниевой пластиной и с внутренней рамкой посредством упругих торсионов, продольные оси каждой пары торсионов взаимно перпендикулярны, между корпусной кремниевой пластиной и подвижными рамками образован посредством сквозного анизотропного травления зазор, на одну сторону корпусной кремниевой пластины жестко присоединена изоляционная обкладка с нанесенными на нее неподвижными проводящими электродами электростатического силового преобразователя, задающего принудительные колебания внутренней рамки, при этом на обе стороны корпусной кремниевой пластины присоединены изоляционные обкладки, на которые нанесены электроды электростатического силового преобразователя, задающего принудительные колебания внутренней рамки, электроды емкостного преобразователя перемещений и электроды силового электростатического преобразователя обратной связи, внешняя подвижная рамка является подвижным проводящим электродом электростатического силового преобразователя обратной связи, компенсирующего момент от действия кориолисовой силы, и подвижным проводящим электродом емкостного преобразователя перемещений. Технический результат - повышение точности измерений. 2 ил. 
Чувствительный элемент микросистемного гироскопа, содержащий корпусную кремниевую пластину, симметрично расположенные внутри друг друга и разделенные равномерными зазорами внешнюю и внутреннюю подвижные рамки, при этом внешняя рамка соединена с корпусной кремниевой пластиной и с внутренней рамкой посредством упругих торсионов, продольные оси каждой пары торсионов взаимно перпендикулярны, между корпусной кремниевой пластиной и подвижными рамками образован посредством сквозного анизотропного травления зазор, на одну сторону корпусной кремниевой пластины жестко присоединена изоляционная обкладка с нанесенными на нее неподвижными проводящими электродами электростатического силового преобразователя, задающего принудительные колебания внутренней рамки, отличающийся тем, что на обе стороны корпусной кремниевой пластины присоединены изоляционные обкладки, на которые нанесены электроды электростатического силового преобразователя, задающего принудительные колебания внутренней рамки, электроды емкостного преобразователя перемещений и электроды силового электростатического преобразователя обратной связи, внешняя подвижная рамка является подвижным проводящим электродом электростатического силового преобразователя обратной связи, компенсирующего момент от действия кориолисовой силы, и подвижным проводящим электродом емкостного преобразователя перемещений.
| US 5488862 A, 06.02.1996; | |||
| МИКРОСИСТЕМНЫЙ ГИРОСКОП | 2011 |
|
RU2466354C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2400708C1 |
| US 7805994 B2, 05.10.2010 | |||

