Изобретение относится к бортовым системам автоматического управления беспилотными летательными аппаратами в условиях широкого диапазона их применения по скорости и высоте полета.
Известна система автоматического управления (САУ) летательным аппаратом (ЛА), в которой содержится блок задающего воздействия, блок сравнения, суммирующий усилитель, датчики состояния и исполнительное устройство [1].
Наиболее близкой к предлагаемому изобретению является система управления летательным аппаратом, содержащая датчик угла, датчик угловой скорости и прямую цепь, состоящую из последовательно соединенных задатчика угла, блока сравнения, цифроаналогового преобразователя, суммирующего усилителя, второй вход которого соединен с выходом датчика угловой скорости, и исполнительного устройства [2].
Недостатком известных систем являются ограниченные функциональные возможности и невысокая точность, обусловленные в значительной степени запаздыванием в прямой цепи системы управления при применении бортовых цифровых вычислительных машин (БЦВМ).
Решаемой в предложенной системе управления технической задачей является расширение функциональных возможностей системы и повышение точности процессов управления. Предложенным построением системы управления достигается повышение показателей качества в условиях широкого диапазона параметров летательного аппарата и наличия запаздывания сигнала управления, обусловленного БЦВМ, т.е. достижением в системе управления свойства робастности.
Указанный технический результат достигается тем, что в известную систему управления летательным аппаратом, содержащую датчик угла, датчик угловой скорости и последовательно соединенные задатчик угла, блок сравнения, цифроаналоговый преобразователь, суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости, и исполнительное устройство, дополнительно введен элемент запаздывания обратной связи, вход которого соединен с выходом датчика угла, а выход - со вторым входом блока сравнения, при этом величина времени запаздывания τэз элемента запаздывания обратной связи составляет τэз=(0,1÷0,4)τоб, где τоб - величина постоянной времени летательного аппарата.
За основу расчета принята постоянная времени объекта управления (ЛА) как доминирующая для контура регулирования: блоки системы, формирующие закон управления, - исполнительное устройство - объект управления - датчики состояния.
Действительно, при этом решении обеспечивается отработка сигналов управления с максимальным качеством в широком диапазоне изменения высоты, скорости полета и массы летательного аппарата посредством реализации части системы управления на основе бортовой цифровой вычислительной машины (БЦВМ).
Построение системы управления с БЦВМ в канале рассогласования осуществляется следующим образом.
Пусть передаточная функция прямой цепи имеет вид:

где τоб - величина постоянной времени инерционной части объекта управления (ЛА);
Wa - передаточная функция САУ, включающей в себя цифровую часть, цифроаналоговую часть, аналоговую часть, исполнительное устройство, оставшуюся часть объекта управления и датчики обратной связи.
Рассмотрим обобщенную передаточную функцию замкнутой САУ Wз с учетом введения элемента запаздывания в обратную связь по углу. Это звено имеет передаточную функцию:

где τэз - величина времени запаздывания этого звена.
Передаточная функция Wз имеет вид:

Без погрешности для аналитического исследования рассмотрим упрощенное описание звена запаздывания в первом приближении разложения в ряд в виде инерционного звена. Тогда (3) примет вид:
Непосредственно из (4) видно, что в числителе появляется форсирующая ячейка (τэзр+1), позволяющая динамичнее отрабатывать входной сигнал. Однако одновременно параметр τэз входит и в знаменатель передаточной функции (4), но как слагаемое с τоб. Соответствующий выбор τэз в сравнении с τоб позволяет существенно повысить точность процесса с динамической точки зрения: повысить быстродействие и сохранить устойчивость системы управления. Действительно, при τэз<<τоб постоянная времени знаменателя (4) практически не меняется, а числитель содержит производную по управлению, оказывая форсированную его отработку.
Наиболее приемлемым и определяющим компромисс по увеличению быстродействия и сохранения показателей устойчивости замкнутой САУ в целом является соотношение

На основе изложенного рассматривается предлагаемая система управления, имеющая цифровую и аналоговую части и для их сочетания цифроаналоговый преобразователь.
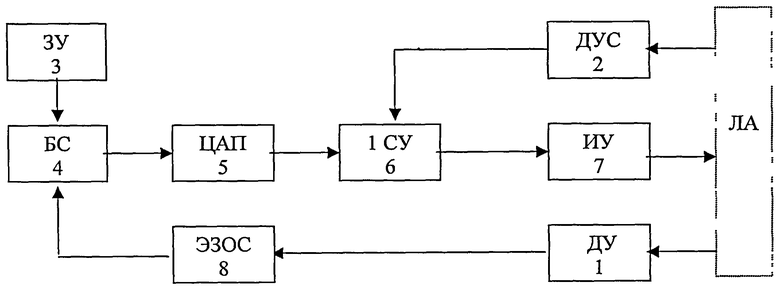
На чертеже представлена блок-схема бортовой цифроаналоговой системы управления летательным аппаратом.
Летательный аппарат условно показан на чертеже пунктирной линией.
Система управления содержит датчик угла 1 (ДУ), датчик угловой скорости 2 (ДУС) и прямую цепь, состоящую из последовательно соединенных задатчика угла 3 (ЗУ), блока сравнения 4 (БС), цифроаналогового преобразователя 5 (ЦАП), суммирующего усилителя 6 (СУ), второй вход которого соединен с выходом датчика угловой скорости 2, и исполнительного устройства 7 (ИУ). Кроме того, система содержит элемент запаздывания обратной связи 8 (ЭЗОС), вход которого соединен с выходом датчика угла 1, а выход - со вторым входом блока сравнения 4.
Аналоговая часть системы управления включает в себя датчик угловой скорости 2, исполнительное устройство 7 и суммирующий усилитель 6. Цифровые каналы основного контура - это датчик угла 1 и блоки 3 и 4. Блок 5 - цифроаналоговый.
Система управления работает следующим образом.
Сигнал управления σ для подачи на исполнительное устройство 7 формируется датчиками и блоками 1÷6 и 8 в соответствии с законом управления:

где ∆φ - сигнал рассогласования, формируемый в блоке 4:

здесь φзад - сигнал задающего воздействия, подается от датчика 3;
К1, К2 - передаточные числа блока 6.
Сигнал угла φ снимается с датчика угла 1, сигнал угловой скорости ωφ снимается с датчика угловой скорости 2, сигнал задающего воздействия φзад формируется задатчиком угла 3. Коэффициенты К1 и К2 и сигнал σ формируются в суммирующем усилителе 6. Цифроаналоговый преобразователь 5 преобразует цифровой сигнал К1∆φ в аналоговую форму.
Исполнительное устройство 7 отрабатывает суммарный аналоговый управляющий сигнал σ, отклоняя рулевые органы на величину δ.
Значительная часть системы управления несложно реализуется алгоритмически, все звенья и блоки могут быть также реализованы на элементах автоматики и вычислительной техники, например, по [3, 4].
Предложенная бортовая цифроаналоговая система управления летательным аппаратом позволяет расширить функциональные возможности системы и повысить точность управления.
Источники информации
1. Э.Я.Соловей, А.В.Храпов. Динамика систем наведения управляемых авиабомб. М.: Машиностроение, 2006, с.216.
2. Патент РФ №2305308, 27.08.07 г., кл. G05D 1/08.
3. В.Б.Смолов. Функциональные преобразователи информации. Л., Энергоиздат, Ленинградское отделение, 1981, с.22, 41.
4. А.У.Ялышев, О.И.Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.107, 126.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ НЕЛИНЕЙНОГО АДАПТИВНОГО ЦИФРОАНАЛОГОВОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА СТАБИЛИЗАЦИИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601089C1 |
| Способ формирования многофункционального сигнала стабилизации углового положения летательного аппарата и устройство для его осуществления | 2016 |
|
RU2631718C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ БОРТОВЫХ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2469373C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ БОРТОВЫХ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2473107C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КРЕНУ | 2005 |
|
RU2305308C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО СИГНАЛА УГЛОВОЙ СТАБИЛИЗАЦИИ НЕСТАЦИОНАРНОГО ОБЪЕКТА УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2653409C1 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491602C1 |
Изобретение относится к области приборостроения и может найти применение в бортовых системах автоматического управления беспилотными летательными аппаратами. Технический результат - расширение функциональных возможностей. Для достижения данного результата система управления содержит датчик угла, датчик угловой скорости, задатчик угла, блок сравнения, цифроаналоговый преобразователь, суммирующий усилитель, исполнительное устройство и элемент запаздывания обратной связи. Величина времени запаздывания τэз элемента запаздывания обратной связи составляет τэз=(0,1÷0,4)τоб, где τоб - величина постоянной времени летательного аппарата. 1 ил.
Бортовая цифроаналоговая система управления летательным аппаратом (ЛА), содержащая датчик угла, датчик угловой скорости и последовательно соединенные задатчик угла, блок сравнения, цифроаналоговый преобразователь, суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости, и исполнительное устройство, отличающаяся тем, что она содержит элемент запаздывания обратной связи, вход которого соединен с выходом датчика угла, а выход - со вторым входом блока сравнения, при этом для передаточной функции замкнутой системы автоматического управления (САУ) вида:

где Wa - передаточная функция системы автоматического управления, τоб - величина постоянной времени инерционной части объекта управления (ЛА),
величина времени запаздывания τэз элемента запаздывания обратной связи составляет τэз=(0,1÷0,4)τоб.
| ГЕЙЛЕР Л.Б | |||
| Введение в теорию автоматического регулирования | |||
| - Минск: Наука и техника, 1967, с.168-171, 237-239 | |||
| Интегратор | 1938 |
|
SU56663A2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПРОДОЛЬНО-БАЛАНСИРОВОЧНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310899C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |

