Изобретение относится к области гидроакустики и может быть использовано для определения местоположения подводных объектов с использованием акустических волн.
Известен способ определения пеленга на источник излучения и известно устройство для его осуществления [1]. Способ заключается в формировании направленного приема с помощью устройства в виде многоэлементной антенны, апертура которой достаточно велика по сравнению с длиной волны. Общим недостатком такого способа и такого устройства является сравнительно большая погрешность пеленгования.
Известен также способ определения пеленга на источник излучения, в котором для уменьшения погрешности пеленгования используется фазовая информация [2]. Известный способ определения пеленга на источник излучения включает генерацию и излучение источником гармонического сигнала частотой ω, прием акустического сигнала набором из N≥8 гидрофонов, образующих ориентированную в горизонтальной плоскости круговую измерительную базу, выделение квадратурных составляющих комплексной огибающей принятых акустических сигналов, измерение фазы акустических сигналов, предварительном фазировании измерительной базы на N направлений, проходящих через ее центр и каждый из N гидрофонов, определение направления, соответствующего максимуму сигнала, и гидрофона, лежащего на этом направлении, вычисление пеленга на источник в локальной системе координат, связанной с измерительной базой, по формуле:

где:
 ,
,
 - угловая координата n-го гидрофона базы, n=1, 2, … N; N - число гидрофонов базы, ψn - кумулятивная фаза на n-ном гидрофоне относительно фазы на первом гидрофоне, относительно которого отсчитываются углы φn, θ0 - вычисляемая по формуле: ψn=(ψn-ψn-1)+(ψn-1-ψn-2)+…(ψ2-ψ1).
- угловая координата n-го гидрофона базы, n=1, 2, … N; N - число гидрофонов базы, ψn - кумулятивная фаза на n-ном гидрофоне относительно фазы на первом гидрофоне, относительно которого отсчитываются углы φn, θ0 - вычисляемая по формуле: ψn=(ψn-ψn-1)+(ψn-1-ψn-2)+…(ψ2-ψ1).
 , σθ - погрешность определения пеленга, σψ - погрешность измерения фазы, причем первым считается гидрофон, лежащий на направлении максимума сигнала, а расстояние между гидрофонами больше половины длины волны, но меньше длины волны акустического излучения на частоте ω.
, σθ - погрешность определения пеленга, σψ - погрешность измерения фазы, причем первым считается гидрофон, лежащий на направлении максимума сигнала, а расстояние между гидрофонами больше половины длины волны, но меньше длины волны акустического излучения на частоте ω.
По известному пеленгу на источник излучения вычисляют и курсовой угол на источник излучения по формуле:
β0=β1±θ0, где
β1 - курсовой угол первого гидрофона круговой измерительной базы, знак (+) берется для курсового угла правого борта, а знак (-) берется для курсового угла левого борта, если пеленгатор находится на подвижном объекте (на судне или подводном аппарате).
Известный способ определения пеленга на источник излучения осуществляется через известное устройство [2], содержащее ориентированную в горизонтальной плоскости круговую базу из N≥8 приемных гидрофонов, N-канальный приемник, входы которого соединены с выходами N гидрофонов базы, N-канальный блок выделения квадратурных составляющих комплексной огибающей принятых сигналов, N входов которого соединены с выходами N-канального приемника, генератор опорного сигнала частоты ω, выход которого соединен со вторыми N-входами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, N-канальный измеритель фазы принятых сигналов, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, блок фазирования принятых сигналов на N-направлений, проходящих через центр базы и каждый из N гидрофонов, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, блок выбора максимального значения, вход которого соединен с N выходами блока фазирования принятых сигналов и вычислитель пеленга, первые N входов которого соединены с N выходами измерителя фазы принятых сигналов, а второй вход - с выходом блока выбора максимального значения.
Известный способ определения пеленга на источник излучения и известное устройство для определения пеленга на источник излучения по своему функциональному назначению, по своей технической сущности и по достигаемому техническому результату наиболее близки к заявленному способу и устройству для его осуществления.
Недостатком известного способа определения пеленга на источник излучения и устройства, его реализующего, является достаточно большая погрешность пеленгования на больших расстояниях от источника излучения, а следовательно, на низких рабочих частотах, когда пеленгатор находится на подводном носителе малых размеров, например на автономном подводном аппарате. Объясняется это тем, что с понижением рабочей частоты растет погрешность пеленгования, т.к. размер измерительной базы пеленгатора остается ограниченным на носителе малых размеров, а его волновой размер уменьшается. Погрешность пеленгования влияет на вычисление величины курсового угла.
В основу изобретения поставлена задача разработать такой способ определения пеленга и курсового угла на источник излучения с подвижного подводного объекта и устройство для его осуществления, которые позволят уменьшить погрешность пеленгования на низких частотах без увеличения габаритных размеров пеленгатора, но за счет синтезирования измерительной базы подвижным носителем пеленгатора.
Поставленная задача решается тем, что в способе определения курсового угла на источник излучения с подвижного подводного объекта, заключающемся в генерации и излучении источником гармонического сигнала с частотой ω, приеме акустического сигнала набором из N≥8 гидрофонов, образующих ориентированную в горизонтальной плоскости круговую измерительную базу, выделении квадратурных составляющих комплексной огибающей принятых акустических сигналов, измерении фазы акустических сигналов, предварительном фазировании измерительной базы на N направлений, проходящих через ее центр и каждый из N гидрофонов, определении направления, соответствующего максимуму сигнала, и гидрофона, лежащего на этом направлении, вычислении пеленга на источник в локальной системе координат, связанной с измерительной базой, по формуле:
где:
,
- угловая координата n-го гидрофона базы, n=1, 2, … N; N - число гидрофонов базы, ψn - кумулятивная фаза на n-ном гидрофоне, относительно фазы на первом гидрофоне, относительно которого отсчитываются углы φn, θ0 - вычисляемая по формуле: ψn=(ψn-ψn-1)+(ψn-1-ψn-2)+…(ψ2-ψ1)
, σθ - погрешность определения пеленга, σψ - погрешность измерения фазы, причем первым гидрофоном считается лежащий на направлении максимума сигнала, устанавливают на подвижном подводном объекте дополнительную пару гидрофонов, разнесенных в диаметральной плоскости вдоль подвижного подводного объекта на расстояние  , (λ - длина волны акустического излучения), после вычисления пеленга вычисляют курсовой угол на источник β0 по формуле:
, (λ - длина волны акустического излучения), после вычисления пеленга вычисляют курсовой угол на источник β0 по формуле:
β0=β1±θ0, σβ0=σθ, где
β1 - курсовой угол первого гидрофона круговой измерительной базы, знак (+) берется для курсового угла правого борта, знак (-) берется для курсового угла левого борта, а σβ0 - погрешность определения курсового угла, после чего синтезируют подвижным подводным объектом лучевую траекторию, на которой выполняется условие β0=180°+σθ, затем синтезируют равномерным прямолинейным движением подвижного подводного объекта траверзную траекторию, на которой выполняется условие β0=±90°+σθ, измеряют на траверзной траектории в моменты времени tm, m=1÷М, разность фаз акустических сигналов Fm, принятых дополнительной парой гидрофонов, аппроксимируют измеренные значения разности фаз акустических сигналов Fm(tm) на траверзной траектории линейной зависимостью F=a(t-t0), определяют методом наименьших квадратов параметры а, t0 по формулам:
и определяют истинный курсовой угол на источник в точке t=t0 по формуле

Поставленная задача решается также тем, что в устройство для определения курсового угла на источник излучения с подвижного подводного объекта, содержащее ориентированную в горизонтальной плоскости круговую базу из N≥8 приемных гидрофонов, N-канальный приемник, входы которого соединены с выходами N гидрофонов базы, N-канальный блок выделения квадратурных составляющих комплексной огибающей принятых сигналов, N входов которого соединены с выходами N-канального приемника, генератор опорного сигнала частоты ω, выход которого соединен со вторыми N входами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, N-канальный измеритель фазы принятых сигналов, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, блок фазирования принятых сигналов на N направлений, проходящих через центр базы и каждый из N гидрофонов, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, блок выбора максимального значения, вход которого соединен с N выходами блока фазирования принятых сигналов и вычислитель пеленга, первые N входов которого соединены с N выходами измерителя фазы принятых сигналов, а второй вход - с выходом блока выбора максимального значения, причем расстояние между гидрофонами круговой измерительной базы больше половины длины волны и меньше длины волны акустического излучения на рабочей частоте ω, введены дополнительно блок синтезирования лучевой траектории, вход которого соединен с первьм выходом вычислителя пеленга, блок синтезирования траверзной траектории, первый вход которого соединен со вторым выходом вычислителя пеленга, а второй вход соединен с выходом блока синтезирования лучевой траектории, два дополнительных гидрофона, разнесенные в диаметральной плоскости вдоль подвижного подводного объекта на расстояние 1≤λ/4σθ, (λ-длина волны акустического излучения на рабочей частоте ω), 2-канальный приемник, входы которого соединены с выходами двух дополнительных гидрофонов, двухканальный блок выделения квадратурных составляющих комплексной огибающей принятых сигналов, входы которого соединены с выходами 2-канального приемника, второй измеритель фазы, первый вход которого соединен с выходом двухканального блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, таймер, вход которого соединен с выходом блока синтезирования траверзной траектории, а первый выход соединен со вторым входом измерителя фазы, вычислитель курсового угла, первый вход которого соединен с выходом второго измерителя фазы, а второй вход соединен со вторым выходом таймера.
Использование синтезированной траверзной траектории, на которой выполняется измерение разности фаз сигналов, принятых дополнительной парой гидрофонов, и вычисляются пеленг и курсовой угол на источник излучения с подвижного подводного объекта, и длина которой существенно превышает длину волны, позволяет уменьшить погрешность пеленгования на больших расстояниях от источника и на низких частотах без увеличения габаритных размеров самого пеленгатора, размещенного на подвижном подводном объекте малых размеров. Следовательно, способ определения курсового угла на источник излучения с подвижного подводного объекта и устройство для его осуществления объединены единым изобретательским замыслом, на решение которого они направлены, т.к. только посредством всей совокупности существенных признаков заявленных способа и устройства для его осуществления достигается единый технический результат - уменьшение погрешности измерения курсового угла на больших расстояниях от источника, т.е. на низких частотах.
Совокупность существенных признаков заявленных способа определения курсового угла на источник излучения с подвижного подводного объекта и устройство для его осуществления имеют причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков способа и устройства стало возможным решить поставленную техническую задачу.
На основании изложенного можно заключить, что заявленные способ определения курсового угла на источник излучения с подвижного подводного объекта и устройство для его осуществления являются новыми, обладают изобретательским уровнем, т.е. они явным образом не следуют из уровня техники и пригодны для промышленного применения.
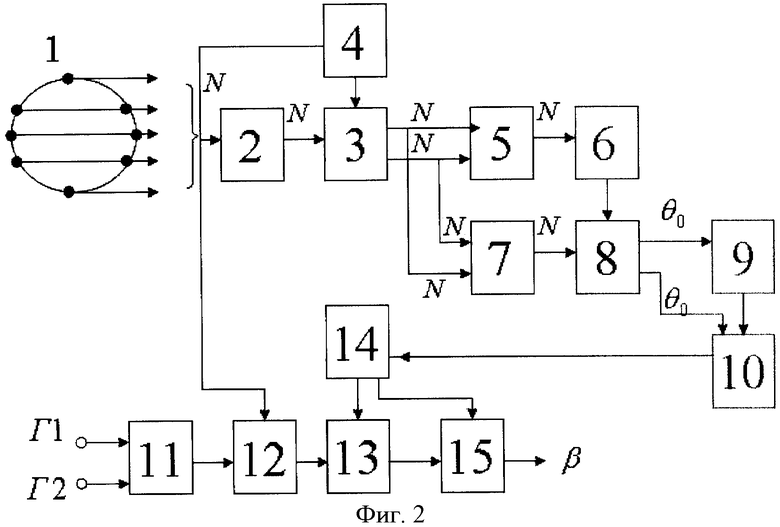
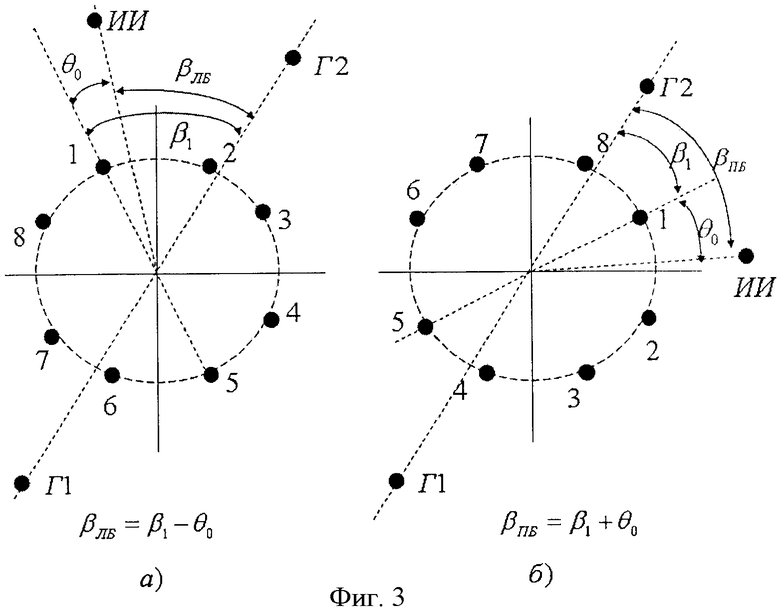
Сущность заявленных способа определения курсового угла на источник излучения с подвижного подводного объекта и устройство для его осуществления поясняется чертежами, где на фиг.1 приведены а) схема формирования лучевой и траверзной траекторий подвижным подводным объектом и б) линейная аппроксимация массива измерительной информации (Fm, tm); на фиг.2 представлена блок-схема устройства для измерения курсового угла на источник излучения; на фиг.3 показано определение курсового угла β0 на источнике излучения по пеленгу θ0 в локальной системе координат, связанной с круговой измерительной базой, и курсовому углу β1 на первый гидрофон круговой измерительной базы: а) левый борт βЛБ=β1-θ0, б) правый борт βПБ=β1+θ0.
Для реализации заявленного способа определения курсового угла генерируют и излучают источником гармонического сигнала частотой ω акустический сигнал, который принимают N гидрофонами измерительной базы, ориентированной в горизонтальной плоскости. Сигналы, принятые гидрофонами базы, предварительно фазируют на N направлений, проходящих через центр базы и каждый из гидрофонов. Затем выделяют квадратурные составляющие комплексной огибающей принятых акустических сигналов, измеряют фазу принятых акустических сигналов, определяют направление, соответствующее максимуму сигнала, и гидрофон, лежащий на этом направлении. Пеленг на источник в локальной системе координат, связанной с круговой измерительной базой, определяют по формуле (1).
Для уточнения пеленга, измеренного с погрешностью σθ, и его пересчета в курсовой угол подвижный подводный объект пеленгатора синтезирует лучевую траекторию и движется вдоль луча, на котором курсовой угол на источник равен 180°, а источник излучения оказывается со стороны кормовых углов, как это показано на фиг.1. Для реализации такой траектории движения на борту подвижного подводного объекта используется типовой блок управления движением, который содержит измеритель курсового угла, задатчик курсового угла, который является параметром синтезируемой траектории, компаратор, вырабатывающий сигнал рассогласования, и исполнительное устройство, подающее сигнал управления на двигатели. После того, как сигнал рассогласования окажется меньше некоторой пороговой величины, подается сигнал управления на блок синтезирования траверзной траектории, на которой курсовой угол на источник составляет 90°+σθ, как это показано на фиг.1(а). При движении подвижного подводного объекта равномерно и прямолинейно вдоль траверзной траектории измеряется разность фаз акустических сигналов, принимаемых дополнительной парой гидрофонов, размещенных на подвижном носителе в диаметральной плоскости вдоль его длины на расстоянии 1≤λ/4σθ, которое может быть существенно больше длины волны акустического излучения, но ограничено в реальной ситуации размером самого объекта. Массив измеренных значений разности фаз (Fm, tm) на всей синтезированной траверзной траектории легко аппроксимируется линейной зависимостью, как это показано на фиг.1 б), а нулевое значение разности фаз соответствует истинному курсовому углу на источник, погрешность измерения которого уменьшена в  раз.
раз.
Устройство для определения курсового угла на источник излучения с подвижного подводного объекта содержит круговую измерительную базу 1, N-канальный приемник 2, блок 3 выделения квадратурных составляющих комплексной огибающей сигнала, опорный генератор 4, блок 5 фазирования на N направлений, блок 6 выбора максимального значения, блок 7 измерения фазы, вычислитель пеленга 8, блок формирования лучевой траектории 9, блок формирования траверзной траектории 10. Кроме того, в состав устройства для определения курсового угла введены два дополнительных гидрофона Г1, Г2, 2-канальный приемник 11, блок 12 выделения квадратурных составляющих комплексной огибающей сигнала, измеритель фазы 13, таймер 14 и вычислитель курсового угла 15. Дополнительные гидрофоны размещены на подвижном подводном объекте в диаметральной плоскости вдоль его длины на расстоянии 1≤λ/4σθ.
Устройство для определения курсового угла на источник излучения с подвижного подводного объекта работает следующим образом.
Акустический сигнал, принятый N гидрофонами круговой измерительной базы 1, ориентированной в горизонтальной плоскости, усиливается N-канальным приемником 2 и поступает на первые N входов блока 3 выделения квадратурных составляющих комплексной огибающей принятых сигналов, на второй вход которого поступает сигнал частоты со опорного генератора 4. Затем сигналы с выхода блока 3 выделения квадратурных составляющих поступают на 2N входов блока 5 фазирования на N направлений и блок 7 измерения фазы. С выхода блока 5 сигналы поступают в блок 6 выбора максимального значения. Измеренные N значений кумулятивной фазы с выхода блока 7 и грубо определенное в блоке 6 значение пеленга поступают в вычислитель пеленга 8, который обрабатывает всю измерительную информацию по алгоритму (1) с погрешностью σθ.
Для дальнейшего уменьшения погрешности определения пеленга и курсового угла на источник излучения сигнал с выхода вычислителя 8 пеленга поступает на входы блоков 9 и 10 синтезирования лучевой и траверзной траекторий, а подвижный подводный объект выполняет последовательно это движение. При движении по траверзной траектории акустические сигналы, принятые дополнительной парой гидрофонов Г1, Г2, усиливаются двухканальным приемником 11, поступают в блок 12 выделения квадратурных составляющих комплексной огибающей сигнала и далее в измеритель фазы 13. Полный набор измерительной информации, включающей измеренные разности фаз Fm и соответствующие времена отсчета tm, число которых определяется таймером 14, поступает в вычислитель курсового угла 15.
Источники
1. А.С.Колчеданцев, «Гидроакустические станции», Л., Судостроение, 1982 г., с.42-49.
2. Патент РФ №2158430, «Способ определения пеленга на источник излучения и устройство для его осуществления», МПК 7 G01S 3/80, 1998 г. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА НА ИСТОЧНИК ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2158430C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2308054C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА НА ШУМЯЩИЙ ОБЪЕКТ | 2010 |
|
RU2444747C1 |
| ПЕЛЕНГАТОР ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ С УЛЬТРАКОРОТКОЙ БАЗОЙ | 2000 |
|
RU2179730C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1995 |
|
RU2084924C1 |
| Гидроакустическая станция контроля подводной обстановки | 2019 |
|
RU2724145C1 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука и измерения его координат | 2021 |
|
RU2770564C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море | 2020 |
|
RU2739000C1 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ИСТОЧНИКА ЗВУКА, ИЗМЕРЕНИЯ АЗИМУТАЛЬНОГО УГЛА НА ИСТОЧНИК И ГОРИЗОНТА ИСТОЧНИКА ЗВУКА В МЕЛКОМ МОРЕ | 2011 |
|
RU2488133C1 |
Изобретение относится к области гидроакустики и может быть использовано для определения местоположения подводных объектов. Способ заключается в генерации и излучении источником гармонического сигнала с частотой ω, приеме акустического сигнала набором из N≥8 гидрофонов, образующих ориентированную в горизонтальной плоскости круговую измерительную базу, выделении квадратурных составляющих комплексной огибающей принятых акустических сигналов, измерении фазы акустических сигналов, предварительном фазировании измерительной базы на N направлений, проходящих через ее центр и каждый из N гидрофонов, определении направления, соответствующего максимуму сигнала, и гидрофона, лежащего на этом направлении, вычислении курсового угла на источник в локальной системе координат, связанной с измерительной базой, по соответствующим формулам. Первым гидрофоном считается лежащий на направлении максимума сигнала. На подвижном подводном объекте дополнительно установлена пара гидрофонов, разнесенных в диаметральной плоскости вдоль подвижного подводного объекта на расстояние 1≤λ/4σθ. После вычисления пеленга вычисляют курсовой угол β0 на источник по формуле β0=β1±θ0, σβ0=σθ, где β1 - курсовой угол первого гидрофона круговой измерительной базы, знак (+) берется для курсового угла правого борта, знак (-) берется для курсового угла левого борта, σβ0 - погрешность определения курсового угла, σθ - погрешность измерения пеленга. Затем синтезируют подвижным подводным объектом лучевую траекторию, на которой выполняется условие β0=180°+σθ, и траверзную траекторию, на которой выполняется условие β0=±90°+σθ. После чего измеряют на траверзной траектории в моменты времени tm, m=1÷M, разность фаз акустических сигналов Fm, принятых дополнительной парой гидрофонов, аппроксимируют измеренные значения разности фаз акустических сигналов Fm(tm) на траверзной траектории линейной зависимостью F=a(t-t0), определяют методом наименьших квадратов параметры a, t0 по соответствующим формулам и определяют истинный курсовой угол на источник в точке t=t0 по формуле β=90°+σβ,  . Технический результат - уменьшение погрешности измерения курсового угла на низких частотах без увеличения габаритных размеров пеленгатора. 2 н.п. ф-лы, 3 ил.
. Технический результат - уменьшение погрешности измерения курсового угла на низких частотах без увеличения габаритных размеров пеленгатора. 2 н.п. ф-лы, 3 ил.
1. Способ определения курсового угла на источник излучения с подвижного подводного объекта, заключающийся в генерации и излучении источником гармонического сигнала с частотой ω, приеме акустического сигнала набором из N≥8 гидрофонов, образующих ориентированную в горизонтальной плоскости круговую измерительную базу, выделении квадратурных составляющих комплексной огибающей принятых акустических сигналов, измерении фазы акустических сигналов, предварительном фазировании измерительной базы на N направлений, проходящих через ее центр и каждый из N гидрофонов, определении направления, соответствующего максимуму сигнала, и гидрофона, лежащего на этом направлении, вычислении пеленга на источник в локальной системе координат, связанной с измерительной базой, по формуле:

где 
 - угловая координата n-го гидрофона базы, n=1, 2, … N; N - число гидрофонов базы, ψn - кумулятивная фаза на n-м гидрофоне относительно фазы на первом гидрофоне относительно которого отсчитываются углы φn, θ0 - вычисляемая по формуле: ψn=(ψn-ψn-1)+(ψn-1-ψn-2)+…(ψ2-ψ1)
- угловая координата n-го гидрофона базы, n=1, 2, … N; N - число гидрофонов базы, ψn - кумулятивная фаза на n-м гидрофоне относительно фазы на первом гидрофоне относительно которого отсчитываются углы φn, θ0 - вычисляемая по формуле: ψn=(ψn-ψn-1)+(ψn-1-ψn-2)+…(ψ2-ψ1)
 , σθ - погрешность определения пеленга, σψ - погрешность измерения фазы, причем первым гидрофоном считается лежащий на направлении максимума сигнала, отличающийся тем, что устанавливают на подвижном подводном объекте дополнительную пару гидрофонов, разнесенных в диаметральной плоскости вдоль подвижного подводного объекта на расстояние
, σθ - погрешность определения пеленга, σψ - погрешность измерения фазы, причем первым гидрофоном считается лежащий на направлении максимума сигнала, отличающийся тем, что устанавливают на подвижном подводном объекте дополнительную пару гидрофонов, разнесенных в диаметральной плоскости вдоль подвижного подводного объекта на расстояние  , (λ - длина волны акустического излучения), после вычисления пеленга вычисляют курсовой угол на источник β0 по формуле:
, (λ - длина волны акустического излучения), после вычисления пеленга вычисляют курсовой угол на источник β0 по формуле:
β0=β1±θ0, σβ0=σθ, где
β1 - курсовой угол первого гидрофона круговой измерительной базы, знак (+) берется для курсового угла правого борта, знак (-) берется для курсового угла левого борта, σβ0 - погрешность определения курсового угла, после чего синтезируют подвижным подводным объектом лучевую траекторию, на которой выполняется условие β0=180°+σθ, затем синтезируют равномерным прямолинейным движением подвижного подводного объекта траверзную траекторию, на которой выполняется условие β0=±90°+σθ, измеряют на траверзной траектории в моменты времени tm, m=1÷M, разность фаз акустических сигналов Fm, принятых дополнительной парой гидрофонов, аппроксимируют измеренные значения разности фаз акустических сигналов Fm(tm) на траверзной траектории линейной зависимостью F=a(t-t0), определяют методом наименьших квадратов параметры a, t0 по формулам:

и определяют истинный курсовой угол на источник в точке t=t0 по формуле
 .
.
2. Устройство для определения курсового угла на источник излучения с подвижного подводного объекта, содержащее ориентированную в горизонтальной плоскости круговую базу из N≥8 приемных гидрофонов, N-канальный приемник, входы которого соединены с выходами N гидрофонов базы, N-канальный блок выделения квадратурных составляющих комплексной огибающей принятых сигналов, N входов которого соединены с выходами N-канального приемника, генератор опорного сигнала частоты ω, выход которого соединен со вторыми N-входами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, N-канальный измеритель фазы принятых сигналов, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, блок фазирования принятых сигналов на N-направлений, проходящих через центр базы и каждый из N гидрофонов, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, блок выбора максимального значения, вход которого соединен с N выходами блока фазирования принятых сигналов и вычислитель пеленга, первые N входов которого соединены с N выходами измерителя фазы принятых сигналов, а второй вход - с выходом блока выбора максимального значения, причем расстояние между гидрофонами круговой измерительной базы больше половины длины волны и меньше длины волны акустического излучения на рабочей частоте ω, отличающееся тем, что в него введены блок синтезирования лучевой траектории, вход которого соединен с первым выходом вычислителя пеленга, блок синтезирования траверзной траектории, первый вход которого соединен со вторым выходом вычислителя пеленга, а второй вход соединен с выходом блока синтезирования лучевой траектории, два дополнительных гидрофона, разнесенные в диаметральной плоскости вдоль подвижного подводного объекта на расстояние 1≤λ/4σθ (λ-длина волны акустического излучения на рабочей частоте ω), 2-канальный приемник, входы которого соединены с выходами двух дополнительных гидрофонов, двухканальный блок выделения квадратурных составляющих комплексной огибающей принятых сигналов, входы которого соединены с выходами 2-канального приемника, второй измеритель фазы, первый вход которого соединен с выходом двухканального блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, таймер, вход которого соединен с выходом блока синтезирования траверзной траектории, а первый выход соединен со вторым входом измерителя фазы, вычислитель курсового угла, первый вход которого соединен с выходом второго измерителя фазы, а второй вход соединен со вторым выходом таймера.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА НА ИСТОЧНИК ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2158430C2 |
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2032187C1 |
| WO 8906807 A1, 27.07.1989. | |||

