Изобретение относится к системам автоматического управления и может быть использовано в системах регулирования объектами, обладающими известным запаздыванием по управлению, параметры которых - неизвестные постоянные или меняющиеся во времени величины.
Наиболее близким техническим решением к предлагаемому является самонастраивающаяся система управления для объектов с запаздыванием по управлению [патент RU 2210800, МКИ G05B 13/02 (2001.09), опубл. БИ №23, 2003], содержащая объект регулирования, первый блок задания коэффициентов, первый сумматор, первый умножитель, первый интегратор, второй умножитель, второй сумматор, второй интегратор, второй блок задания коэффициентов, третий сумматор, третий умножитель, третий интегратор, четвертый умножитель, четвертый сумматор, блок задержки. Сигналы с выходов объекта регулирования поступают на соответствующие входы первого блока задания коэффициентов. В первом блоке задания коэффициентов происходит умножение сигнала с каждого выхода объекта регулирования на постоянный коэффициент. Сигналы с выходов первого блока задания коэффициентов поступают на соответствующие входы первого сумматора. Сигнал с выхода первого сумматора поступает на второй вход третьего сумматора, на второй вход третьего умножителя и на второй вход четвертого умножителя, сигнал с выхода третьего сумматора подается на второй вход первого умножителя и на первый вход третьего умножителя, сигнал с выхода первого умножителя поступает на вход первого интегратора, сигнал с выхода первого интегратора поступает на первый вход второго умножителя, сигнал с выхода второго умножителя подается на первый вход четвертого сумматора, сигнал с выхода третьего умножителя поступает на вход третьего интегратора, сигнал с выхода третьего интегратора поступает на первый вход четвертого умножителя, сигнал с выхода четвертого умножителя подается на второй вход четвертого сумматора. Сигнал с выхода четвертого сумматора поступает на вход объекта регулирования, на первый вход второго сумматора и на вход блока задержки, сигнал с выхода блока задержки поступает на второй вход второго сумматора, на первый вход первого умножителя и на второй вход второго умножителя, сигнал с выхода второго сумматора подается на вход второго интегратора, сигнал с выхода второго интегратора подается на первый вход третьего сумматора и на вход второго блока задания коэффициентов, сигнал с выхода второго блока задания коэффициентов приходит на третий вход второго сумматора.
Недостатком этой системы является ограниченность функциональных возможностей, связанных с потерей работоспособности системы при работе с нестационарными объектами.
Задачей изобретения является расширение функциональных возможностей системы.
Сущность изобретения состоит в том, что в систему, содержащую объект регулирования, первый блок задания коэффициентов, первый сумматор, первый умножитель, интегратор, второй умножитель, второй сумматор, второй блок задания коэффициентов, третий сумматор, третий умножитель, четвертый умножитель, четвертый сумматор, блок задержки, при этом сигналы с выходов объекта регулирования поступают на соответствующие входы первого блока задания коэффициентов, в первом блоке задания коэффициентов происходит умножение сигнала с каждого выхода объекта регулирования на постоянный коэффициент, сигналы с выходов первого блока задания коэффициентов поступают на соответствующие входы первого сумматора, сигнал с выхода первого сумматора поступает на второй вход третьего сумматора, сигнал с выхода четвертого сумматора поступает на вход объекта регулирования, на первый вход второго сумматора и на вход блока задержки, сигнал с выхода блока задержки поступает на второй вход второго сумматора, сигнал с выхода второго сумматора подается на вход интегратора, сигнал с выхода интегратора подается на первый вход третьего сумматора и на вход второго блока задания коэффициентов, сигнал с выхода второго блока задания коэффициентов приходит на третий вход второго сумматора, дополнительно вводятся третий блок задания коэффициентов, четвертый блок задания коэффициентов, пятый блок задания коэффициентов, при этом сигнал с выхода третьего сумматора поступает на вторые входы второго и четвертого умножителей и на вход пятого блока задания коэффициентов, сигнал с выхода блока задержки поступает на первый и второй входы первого умножителя, сигнал с выхода первого умножителя поступает на вход третьего блока задания коэффициентов, сигнал с выхода третьего блока задания коэффициентов поступает на первый вход второго умножителя, сигнал с выхода второго умножителя поступает на первый вход четвертого сумматора, сигнал с выхода первого сумматора поступает на первый и второй входы третьего умножителя, сигнал с выхода третьего умножителя поступает на вход четвертого блока задания коэффициентов, сигнал с выхода четвертого блока задания коэффициентов поступает на первый вход четвертого умножителя, сигнал с выхода четвертого умножителя поступает на второй вход четвертого сумматора, сигнал с выхода пятого блока задания коэффициентов поступает на третий вход четвертого сумматора.
Вводя в систему третий, четвертый и пятый блоки задания коэффициентов и изменяя подключение первого, второго, третьего и четвертого умножителя получают в системе новую функцию, которая заключается в том, что теперь обеспечивается работоспособность в случае нестационарного объекта с запаздыванием по управлению.
На чертеже представлена блок-схема предлагаемой системы.
Система содержит объект регулирования 1, первый блок задания коэффициентов 2, первый сумматор 3, третий сумматор 4, интегратор 5, второй блок задания коэффициентов 6, второй сумматор 7, блок задержки 8, первый умножитель 9, третий блок задания коэффициентов 10, второй умножитель 11, третий умножитель 12, четвертый блок задания коэффициентов 13, четвертый умножитель 14, пятый блок задания коэффициентов 15, четвертый сумматор 16.
y1…ym - выходы объекта регулирования, u - скалярное управляющее воздействие, удовлетворяющее уравнению

где τ - известное запаздывание объекта регулирования, h1>0, h2>0, h3>0 - постоянные, y - m-мерный вектор выходных координат объекта регулирования, α0 - m-мерный вектор коэффициентов блока 2, z - выход дополнительного контура, динамика которого описывается уравнением

где α0>0 - число.
Система функционирует следующим образом.
Сигналы с выходов объекта регулирования 1 поступают на соответствующие входы блока задания коэффициентов. В блоке задания коэффициентов 2 происходит умножение сигнала с i-ого выхода объекта регулирования 1 на постоянный коэффициент. Сигналы с выходов блока задания коэффициентов 2 поступают на соответствующие входы сумматора 3. Сигнал с выхода сумматора 3 поступает на первый и второй входы третьего умножителя 12 и второй на вход сумматора 4. Сигнал с выхода сумматора 4 поступает на второй вход умножителя 11, на второй вход умножителя 14 и на вход блока задания коэффициентов 15. Сигнал с выхода умножителя 9 поступает на блок задания коэффициентов 10. Сигнал с выхода блока задания коэффициентов 10 поступает на первый вход умножителя 11. Сигнал с выхода умножителя 11 поступает на первый вход сумматора 16. Сигнал с выхода умножителя 12 поступает на блок задания коэффициентов 13. Сигнал с выхода блока задания коэффициентов 13 поступает на первый вход умножителя 14. Сигнал с выхода умножителя 14 поступает на второй вход сумматора 16. Сигнал с выхода блока задания коэффициентов 15 поступает на третий вход сумматора 16. Сигнал с выхода сумматора 16 поступает на вход объекта регулирования 1, на первый вход сумматора 7, на вход блока задержки 8. Сигнал с выхода блока задержки 8 поступает на первый и второй входы умножителя 9 и на второй вход сумматора 7. Сигнал с выхода сумматора 7 поступает на вход интегратора 5. Сигнал с выхода интегратора 5 поступает на вход блока задания коэффициентов 6 и на первый вход сумматора 4. Сигнал с выхода блока задания коэффициентов 6 поступает на третий вход сумматора 7. Сигнал с выхода сумматора 16 является управляющим воздействием u.
Технический результат заключается в расширении функциональных возможностей системы, т.е. в обеспечении работоспособности для случая нестационарного объекта с запаздыванием по управлению за счет использования простых законов управления.
Данное устройство может быть реализовано промышленным способом, на основе стандартной элементарной базы.
Изобретение относится к системам автоматического управления и может быть использовано в системах регулирования объектами, обладающими известным запаздыванием по управлению, параметры которых - неизвестные постоянные или меняющиеся во времени величины. Техническим результатом является расширение функциональных возможностей системы, т.е. обеспечение работоспособности для случая нестационарного объекта с запаздыванием по управлению. Система содержит объект регулирования, блок запаздывания, четыре сумматора, пять блоков задания коэффициентов, четыре умножителя, интегратор. 1 ил.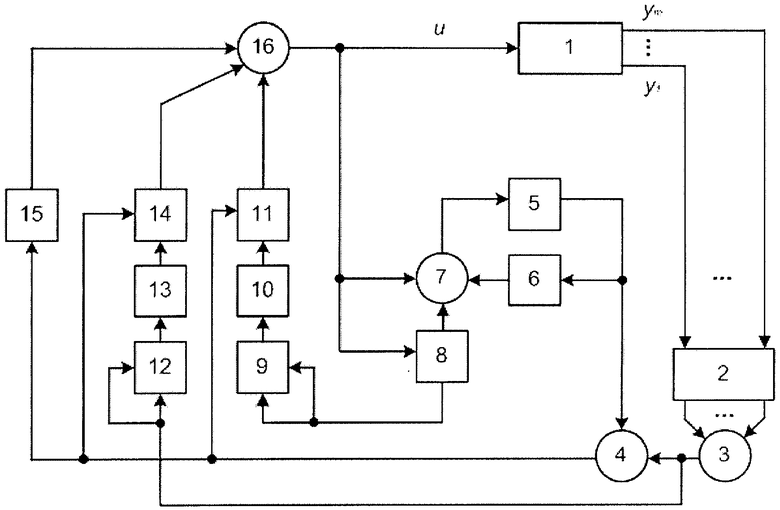
Робастная система управления для объектов с запаздыванием по управлению, содержащая объект регулирования, первый блок задания коэффициентов, первый сумматор, первый умножитель, интегратор, второй умножитель, второй сумматор, второй блок задания коэффициентов, третий сумматор, третий умножитель, четвертый умножитель, четвертый сумматор, блок задержки, при этом сигналы с выходов объекта регулирования поступают на соответствующие входы первого блока задания коэффициентов, в первом блоке задания коэффициентов происходит умножение сигнала с каждого выхода объекта регулирования на постоянный коэффициент, сигналы с выходов первого блока задания коэффициентов поступают на соответствующие входы первого сумматора, сигнал с выхода первого сумматора поступает на второй вход третьего сумматора, сигнал с выхода четвертого сумматора поступает на вход объекта регулирования, на первый вход второго сумматора и на вход блока задержки, сигнал с выхода блока задержки поступает на второй вход второго сумматора, сигнал с выхода второго сумматора подается на вход интегратора, сигнал с выхода интегратора подается на первый вход третьего сумматора и на вход второго блока задания коэффициентов, сигнал с выхода второго блока задания коэффициентов приходит на третий вход второго сумматора, отличающаяся тем, что в систему дополнительно вводятся третий блок задания коэффициентов, четвертый блок задания коэффициентов, пятый блок задания коэффициентов, при этом сигнал с выхода третьего сумматора поступает на вторые входы второго и четвертого блоков задания коэффициентов, при этом сигнал с выхода третьего сумматора поступает на вторые входы второго и четвертого умножителей и на вход пятого блока задания коэффициентов, сигнал с выхода блока задержки поступает на первый и второй входы первого умножителя, сигнал с выхода первого умножителя поступает на вход третьего блока задания коэффициентов, сигнал с выхода третьего блока задания коэффициентов поступает на первый вход второго умножителя, сигнал с выхода второго умножителя поступает на первый вход четвертого сумматора, сигнал с выхода первого сумматора поступает на первый и второй входы третьего умножителя, сигнал с выхода третьего умножителя поступает на вход четвертого блока задания коэффициентов, сигнал с выхода четвертого блока задания коэффициентов поступает на первый вход четвертого умножителя, сигнал с выхода четвертого умножителя поступает на второй вход четвертого сумматора, сигнал с выхода пятого блока задания коэффициентов поступает на третий вход четвертого сумматора.
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2001 |
|
RU2210800C2 |
| РОБАСТНАЯ СИСТЕМА ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2001 |
|
RU2204858C1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1019400A1 |
| WO 00/13071 A1, 09.03.2000. | |||

