Настоящее изобретение касается способа и системы для прогнозирования возможности полной остановки летательного аппарата на посадочной полосе.
Известно, что во время посадки летательный аппарат может выйти за пределы посадочной полосы в продольном направлении в ее конце, например, по причине того, что упомянутый летательный аппарат в конце своей траектории захода на посадку коснулся полосы слишком далеко от ближнего порога полосы (в этом случае говорят о «длинном приземлении»). Такой аварийный случай может быть усугублен слишком высокой скоростью приземления.
Из предшествующего уровня техники известна система, называемая “Runway Awareness and Advisory System”, предоставляющая пилоту летательного аппарата в финальной фазе посадки, то есть во время пробега по полосе с торможением, речевую информацию относительно длины полосы, остающейся до дальнего порога упомянутой полосы. Такая информация является очень полезной, но запоздалой и не может служить предостережением о длинном приземлении.
Кроме того, например, из документов US-5142478 и WO 01/57827 известны системы помощи при посадке для летательных аппаратов, следующих по траектории захода на посадку. Такие системы позволяют получать своевременные предостережения для принятия соответствующих мер по корректировке захода на посадку или для ухода на второй круг. Однако первый из этих документов предусматривает установку соответствующих средств передачи на земле, а второй отличается сложностью в силу множества учитываемых параметров, среди которых можно указать степень расчетного снижения скорости.
Задачей настоящего изобретения является устранение этих недостатков при помощи способа и системы, которые являются простыми и позволяют избежать аварийных случаев продольного выхода в конце посадочной полосы и, следовательно, повысить безопасность полетов.
В этой связи, согласно изобретению, способ для прогнозирования возможности полной остановки летательного аппарата во время посадки на посадочной полосе, в то время как упомянутый летательный аппарат еще находится в полете и снижается в направлении упомянутой посадочной полосы, следуя по наклонной траектории захода на посадку, образующей угол захода на посадку с упомянутой посадочной полосой, при этом упомянутая посадочная полоса содержит два концевых порога,
отличается тем, что:
а) измеряют высоту упомянутого летательного аппарата и вычисляют горизонтальное расстояние, отделяющее упомянутый летательный аппарат от ближнего концевого порога упомянутой посадочной полосы;
b) на основании высоты и горизонтального расстояния, определенных на этапе а), а также на основании упомянутого угла захода на посадку вычисляют расчетное конечное положение упомянутого летательного аппарата на упомянутой посадочной полосе; и
c) упомянутое расчетное конечное положение, вычисленное на этапе b), используют для определения упомянутой возможности.
Таким образом, благодаря настоящему изобретению, можно простым путем перед контактом летательного аппарата с посадочной полосой получить информацию о том, будет ли приземление длинным или нет, что дает время предпринять меры для своевременного предупреждения такого длинного приземления.
Чтобы добиться максимальной точности расчетного конечного положения, упомянутые этапы а) и b) осуществляют несколько раз, по меньшей мере, во время части снижения летательного аппарата на упомянутой траектории захода на посадку.
Угол захода на посадку, используемый на этапе b), может быть предоставлен из базы данных, касающихся посадочной полосы. В варианте этот угол захода на посадку может быть вычислен на борту летательного аппарата на основании инерциальных данных, выдаваемых бортовым инерциальным блоком.
Предпочтительно данные о высоте, используемые на этапе b), получают от радиовысотомера. Что касается горизонтального расстояния, отделяющего упомянутый летательный аппарат от ближнего концевого порога упомянутой посадочной полосы, его можно получить на основании данных о местоположении упомянутого летательного аппарата, выдаваемых спутниковой системой позиционирования, и данных, выдаваемых базой данных, содержащей, по меньшей мере, местоположение ближнего порога упомянутой посадочной полосы.
В наиболее простом варианте применения способа, в соответствии с настоящим изобретением, упомянутое расчетное конечное положение определяют на основании расстояния Х до упомянутого ближнего порога, и это расстояние Х выбирают равным X=(H/tgα)-D, где Н - высота летательного аппарата на траектории захода на посадку, tgα - тангенс угла захода на посадку α, и D - горизонтальное расстояние, отделяющее летательный аппарат от упомянутого ближнего порога.
Следует отметить, что такое определение расчетного конечного положения, которое позволяет производить простые расчеты, вместе с тем не является точным, так как не учитывает выравнивания при посадке между концом траектории захода на посадку и посадочной полосой. Однако такое отсутствие точности остается без последствий, так как его можно учитывать на этапе с) способа.
Кроме того, следует отметить, что для другой цели, отличающейся от задачи настоящего изобретения, а именно для определения положения летательного аппарата по отношению к посадочной полосе, а не для прогнозирования остановки на этой полосе, согласно документу US-4316252, тоже используют расчетное конечное положение, определяемое на основании высоты летательного аппарата и угла захода на посадку. Однако в системе, согласно документу US-4316252, расстояние между расчетным конечным положением и упомянутым ближним порогом посадочной полосы считается известным (тогда как в настоящем изобретении это расстояние является неизвестной величиной, которую надо определить), а горизонтальное расстояние между летательным аппаратом и упомянутым ближним порогом является неизвестной величиной, которую надо определить (тогда, как в настоящем изобретении это расстояние вычисляют заранее на основании данных определения местоположения летательного аппарата и упомянутого ближнего порога).
Для осуществления этапа с) можно, например:
- сравнить упомянутое расстояние между упомянутым конечным положением и упомянутым порогом посадочной полосы с предельным контрольным значением, ниже которого упомянутый летательный аппарат должен произвести полную остановку на упомянутой посадочной полосе и сверх которого упомянутый летательный аппарат не может остановиться на этой полосе; или
- прибавить расчетную посадочную дистанцию к упомянутому расстоянию между упомянутым расчетным конечным положением и упомянутым ближним порогом, затем сравнить полученную таким образом сумму расстояний с длиной посадочной полосы.
В первом случае упомянутое предельное контрольное значение можно определить опытным путем или при помощи вычисления; разумеется, оно зависит от типа летательного аппарата, от его характеристик торможения, от состояния полосы, от метеорологических условий и т.д. Во втором случае упомянутая расчетная посадочная дистанция может представлять собой фиксированное безопасное значение или может быть вычислена в реальном времени при помощи базы данных посадочных характеристик, или получено на основании динамической модели вычисления расстояния до остановки. В обоих случаях в упомянутое предельное контрольное значение и в упомянутую расчетную посадочную дистанцию можно ввести пределы безопасности, чтобы, кроме всего прочего, учитывать выравнивание при посадке, как было указано выше.
Если упомянутое расстояние между расчетным конечным положением и упомянутым ближним порогом превышает упомянутое предельное контрольное значение или если упомянутая сумма расстояний превышает длину посадочной полосы, то можно:
- издать один или несколько тревожных сигналов (звуковой, световой и т.д.) для экипажа, который может выполнить уход на второй круг и повторный взлет; и/или
- подать команду на автоматические уход на второй круг и повторный взлет летательного аппарата при помощи автопилота летательного аппарата.
Кроме того, можно предусмотреть выведение на экран, в частности, экран, называемый в авиационной терминологии “Navigation Display”, схемы, характеризующей текущую посадку, показывающей полосу, пороги полосы, траекторию захода на посадку, расчетное конечное положение, упомянутое предельное контрольное значение и/или расчетную посадочную дистанцию и т.д., и в качестве тревожного сигнала включить мигание и/или расцвечивание яркими цветами некоторых из этих элементов, в частности, в случае невозможности полной остановки летательного аппарата до дальнего концевого порога упомянутой посадочной полосы.
Чтобы не отвлекать внимание экипажа несвоевременным тревожным сигналом или сигналами, когда летательный аппарат уже не в состоянии совершить повторный взлет в условиях полной безопасности, в этом случае можно предусмотреть запрет упомянутых сигналов и подачу команды на автопилот. Такой запрет можно предусмотреть при наличии, по меньшей мере, одного из трех следующих условий:
- радиовысота меньше порогового значения высоты, например, равного 1,5 м;
- скорость летательного аппарата по отношению к воздуху меньше порогового значения скорости, например, равного скорости взлета; и
- шасси летательного аппарата находится под давлением, что свидетельствует о том, что оно уже катится по посадочной полосе.
Кроме того, перед этапом а) среди посадочных полос, находящихся ближе всего к летательному аппарату, можно рассмотреть полосы, на которых можно предусмотреть его посадку. Для этого можно проверить одно или несколько следующих условий:
- летательный аппарат находится в режиме посадки;
- высота летательного аппарата соответствует значению подготовки к посадке;
- выравнивание летательного аппарата с одной или несколькими полосами; и
- горизонтальное расстояние летательного аппарата до ближних порогов упомянутых полос.
Для осуществления этапов а) и b) способа, в соответствии с настоящим изобретением, предпочтительно используют систему, содержащую вычислительные средства
принимающие:
- высоту (Н) упомянутого летательного аппарата, снижающегося в направлении посадочной полосы по наклонной траектории захода на посадку, образующей угол захода на посадку (α) с упомянутой посадочной полосой;
- данные о местоположении упомянутого летательного аппарата; и
- данные о местоположении, по меньшей мере, ближнего концевого порога упомянутой посадочной полосы; и
вычисляющие:
- горизонтальное расстояние (D), отделяющее упомянутый летательный аппарат от упомянутого ближнего концевого порога; и
- расстояние (Х), определяемое уравнением
X=(H/tgα)-D,
где tgα является тангенсом угла захода на посадку α.
В зависимости от двух вышеупомянутых случаев упомянутые вычислительные средства могут:
- осуществить сравнение упомянутого вычисленного расстояния Х с упомянутым предельным контрольным значением и генерировать тревожный сигнал, если упомянутое вычисленное расстояние Х превышает упомянутое предельное контрольное значение; или
- осуществить сложение упомянутого вычисленного расстояния Х и упомянутой расчетной посадочной дистанции, затем сравнить упомянутую сумму с длиной посадочной полосы и генерировать тревожный сигнал, если упомянутая сумма превышает упомянутую длину посадочной полосы.
Настоящее изобретение будет более понятно из прилагаемых чертежей. На этих чертежах аналогичные элементы обозначены одинаковыми позициями.
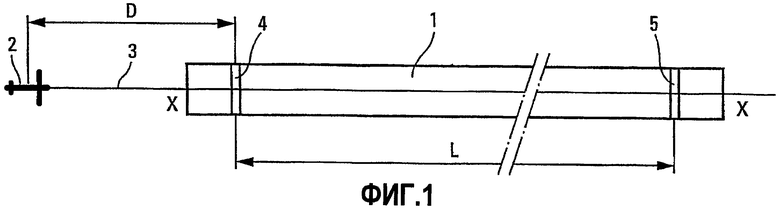
Фиг.1 - схематичный вид сверху посадочной полосы, в направлении которой летательный аппарат совершает маневр захода на посадку.
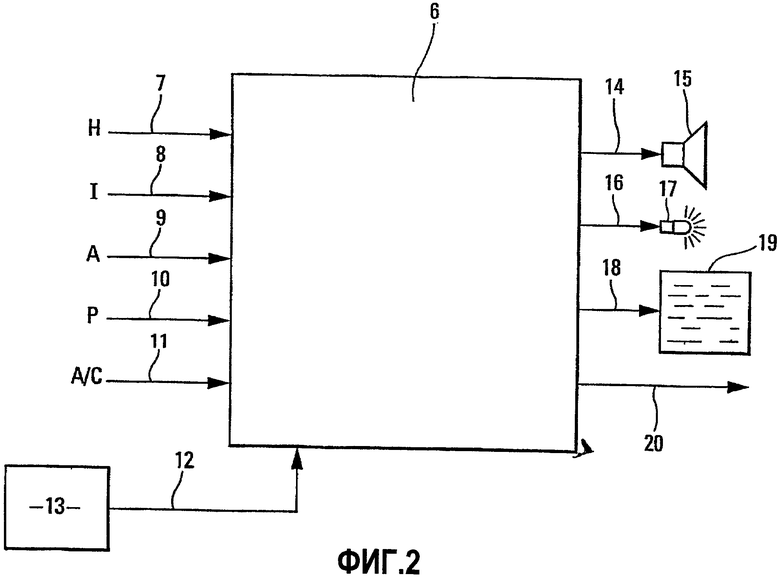
Фиг.2 - блок-схема системы, установленной на борту упомянутого летательного аппарата и позволяющая ему применять способ в соответствии с настоящим изобретением.
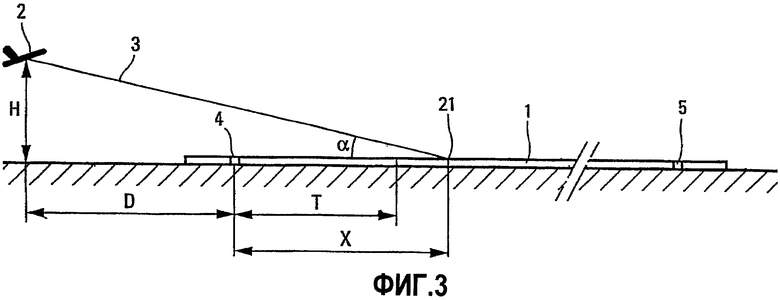
Фиг.3 - схема первого варианта осуществления способа в соответствии с настоящим изобретением.
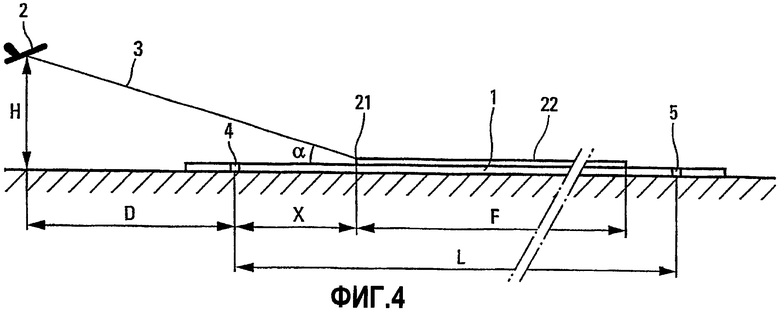
Фиг.4 - схема второго варианта осуществления упомянутого способа.
На фиг.1 схематично показан вид сверху посадочной полосы 1 и летательный аппарат 2. Этот летательный аппарат находится, по меньшей мере, приблизительно на одной линии с осью Х-Х упомянутой посадочной полосы 1 и снижается к ней по наклонной траектории 3 захода на посадку (см. фиг.3 и 4). Посадочная полоса 1 ограничена двумя концевыми порогами 4 и 5, между которыми определена длина L упомянутой полосы. Летательный аппарат находится со стороны концевого порога 4, который, таким образом, является ближним порогом, следовательно, концевой порог 5 является дальним порогом.
На борту летательного аппарата 2 установлены вычислительные средства 6, позволяющие применять способ в соответствии с настоящим изобретением.
Для этого в примере, показанном на фиг.2, вычислительные средства 6 содержат:
- вход 7, принимающий значение радиовысоты Н, измеренное бортовым радиовысотомером или бортовыми радиовысотомерами;
- вход 8, принимающий инерциальные параметры I, выдаваемые бортовым инерциальным блоком;
- вход 9, принимающий анемометрические параметры А, выдаваемые бортовыми анемометрическими датчиками;
- вход 10, принимающий местоположение Р летательного аппарата 2, предоставляемое спутниковой системой позиционирования;
- вход 11, принимающий данные А/С, характеризующие летательный аппарат, такие как конфигурация его несущей поверхности, свернутое или развернутое состояние реверсоров тяги его двигателей, рабочее состояние его двигателей, его характеристики торможения и посадочные характеристики и т.д.; и
- вход 12, соединенный с базой аэропортовых данных 13, содержащей характеристики, по меньшей мере, одной посадочной полосы 1, координаты порогов 4 и 5, длину L, состояние упомянутой полосы (вода, снег, лед, открытое или закрытое состояние полосы) и т.д.
Кроме того, в примере, показанном на фиг.2, вычислительные средства содержат:
- выход 14, выполненный с возможностью активирования звукового сигнального устройства 15;
- выход 16, выполненный с возможностью активирования светового сигнального устройства 17;
- выход 18, выполненный с возможностью активирования электронной системы 19 индикации, например “Navigation Display”; и
- выход 20, выполненный с возможностью передачи команды на автопилот летательного аппарата 2.
Угол захода на посадку α, используемый, как будет указано ниже, вычислительными средствами 6, может быть вычислен последними на основании инерциальных данных I или получен через базу аэропортовых данных 13.
Кроме того, благодаря информации, содержащейся в этой последней базе данных, и информации о положении Р, принятой на входе 10, вычислительные средства 6 определяют горизонтальное расстояние D, отделяющее летательный аппарат 2 от ближнего концевого порога 4.
На основании высоты Н, горизонтального расстояния D и угла захода на посадку α вычислительные средства 6 определяют, предпочтительно повторяющимся образом во время снижения летательного аппарата 2 к посадочной полосе 1, расстояние X=(H/tgα)-D, определяющее относительно ближнего концевого порога 4 расчетное конечное положение 21 траектории 3 захода на посадку (и, следовательно, летательного аппарата 2) на упомянутой посадочной полосе 1 (см. фиг.3 и 4).
В примере выполнения, показанном на фиг.3, вычислительные средства 6 сравнивают упомянутое расстояние Х с предельным контрольным значением Т, определенным опытным путем или вычислением, таким образом, что, если Х меньше Т, летательный аппарат 2 должен остановиться на посадочной полосе 1 до дальнего концевого порога 5 этой полосы, тогда как, если Х превышает Т (случай, показанный на фиг.3), летательный аппарат никак не может остановиться до упомянутого дальнего порога 5 и может только сойти с посадочной полосы 1, если будет продолжать посадку. Предельное контрольное значение Т зависит от типа летательного аппарата 2, от его тормозных характеристик, от метеорологических условий, от посадочной полосы 1 и т.д. Его можно определить опытным путем или при помощи вычисления.
В примере выполнения изобретения, показанном на фиг.4, вычислительные средства 6 складывают расчетную посадочную дистанцию F и упомянутое расчетное расстояние Х и сравнивают сумму Х+F с длиной L посадочной полосы 1. Эта расчетная посадочная дистанция F может быть фиксированным значением, заранее определенным при помощи вычисления или опытным путем, или может вычисляться в режиме реального времени вычислительными средствами 6 с использованием базы данных посадочных характеристик (не показана). Кроме массы летательного аппарата 2 и его аэродинамической конфигурации, расчетная посадочная дистанция F может учитывать угол возвышения полосы 1, ее состояние, скорость самолета по отношению к рекомендованной скорости захода на посадку, возможный попутный ветер, неисправности, которые могут повлиять на посадочную дистанцию (реверсоры тяги, двигатели, противоюзовое устройство и устройство автоматического торможения и т.д.). Важность этих различных параметров отражена в руководстве по летной эксплуатации FCOM (Flight Crew Operating Manual).
Если сумма X+А меньше длины L (случай, показанный на фиг.4), летательный аппарат 2 должен остановиться на посадочной полосе 1 до дальнего порога 5. В противном случае, если сумма X+А превышает длину L, летательный аппарат 2 должен ожидать продольного выхода с полосы на ее конце.
Если, в зависимости от случая, Х превышает Т или X+F превышает L, вычислительные средства 6 генерируют на своих выходах тревожный сигнал, при этом активируются звуковой сигнал 15 и световой сигнал 17 для привлечения внимания пилота летательного аппарата 2 к серьезности ситуации. Кроме того, на экран 19 может выводиться схема, аналогичная схеме на фиг.3 или на фиг.4 в зависимости от случая, с мигающими элементами и/или элементами яркого цвета.
Таким образом, пилот получает предупреждение и может прекратить выполняемую посадку и вовремя уйти на второй круг, если летательный аппарат 2 еще находится на траектории захода на посадку, чтобы выполнить повторный взлет.
В случае необходимости тревожный сигнал, выдаваемый вычислительными средствами 6 и появляющийся на выходе 20, может напрямую подать команду на автопилот летательного аппарата 2 для автоматических ухода на второй круг и повторного взлета.
Несложно понять, что при помощи данных, которые вычислительные средства 6 принимают на своих входах 7-12, прежде чем предпринять маневр посадки на определенную полосу 1, летательный аппарат 2 может вычислить для каждой из нескольких ближайших к нему полос 1:
- расстояние D;
- выравнивание относительно оси Х-Х; и
- высоту Н.
Кроме того, он может проверить, соответствует ли конфигурация летательного аппарата режиму посадки, чтобы определить ту или те полосы, на которой или которые можно предусмотреть посадку.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖЕЛЕЗНОДОРОЖНЫЙ АЭРОДРОМНЫЙ КОМПЛЕКС ВЗЛЕТА-ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2356801C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСАДОЧНОЙ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОСНОВАНИИ ДАННЫХ О ЗАРЕГИСТРИРОВАННЫХ ТРАЕКТОРИЯХ С ПРИМЕНЕНИЕМ В КАЧЕСТВЕ МЕРЫ СХОДСТВА ТРАЕКТОРИЙ МЕРЫ КОСИНУСА (ВАРИАНТЫ) | 2015 |
|
RU2616107C9 |
| СПОСОБ И УСТРОЙСТВО ПОДДЕРЖКИ ПОСАДКИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2389659C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СВЕТОСИГНАЛЬНАЯ СИСТЕМА АЭРОДРОМА | 1999 |
|
RU2191143C2 |
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2703412C2 |
Изобретение относится к области приборостроения и может найти применение в системах навигации летательных аппаратов (ЛА). Технический результат - повышение безопасности. Для достижения данного результата измеряют высоту полета (Н) ЛА и вычисляют горизонтальное расстояние (D), отделяющее ЛА от ближнего концевого порога посадочной полосы. Затем на основании высоты (Н) и горизонтального расстояния (D), и угла захода на посадку (а) вычисляют расчетное конечное положение ЛА на посадочной полосе. 3 н. и 16 з.п. ф-лы, 4 ил.
1. Способ для прогнозирования возможности полной остановки летательного аппарата (2) во время его посадки на посадочной полосе (1), в то время как упомянутый летательный аппарат (2) еще находится в полете на измеренной высоте (Н) и снижается по направлению к упомянутой посадочной полосе (1), следуя по наклонной траектории (3) захода на посадку, образующей угол захода на посадку (α) с упомянутой посадочной полосой (1), при этом упомянутая посадочная полоса содержит два концевых порога (4, 5), способ, в котором определяют расчетное конечное положение (21) упомянутого летательного аппарата на посадочной полосе (1) и используют упомянутое расчетное конечное положение (21) для определения упомянутой возможности, отличающийся тем, что:
a) вычисляют горизонтальное расстояние (D), отделяющее упомянутый летательный аппарат (2) от ближнего концевого порога (4) упомянутой посадочной полосы (1); и
b) определяют расчетное конечное положение (21) его расстоянием (X) до ближнего концевого порога (4) и вычисляют упомянутое конечное положение (21) на основании высоты (Н) и горизонтального расстояния (D), определенного на этапе а), а также на основании упомянутого угла захода на посадку (α).
2. Способ по п.1, отличающийся тем, что упомянутые этапы а) и b) выполняют повторяющимся образом во время, по меньшей мере, части снижения летательного аппарата (2) по упомянутой траектории (3) захода на посадку.
3. Способ по одному из пп.1 или 2, отличающийся тем, что упомянутый угол захода на посадку (α) вычисляют на борту летательного аппарата (2).
4. Способ по одному из пп.1 или 2, отличающийся тем, что упомянутый угол захода на посадку (α) предоставляют посредством базы данных (13), содержащей информацию, относящуюся к упомянутой посадочной полосе (1).
5. Способ по п.1, отличающийся тем, что упомянутое горизонтальное расстояние (D), отделяющее упомянутый летательный аппарат (2) от ближнего концевого порога (4) посадочной полосы (1), получают на основании информации о местоположении упомянутого летательного аппарата (2), выдаваемой спутниковой системой позиционирования, и на основании информации, выдаваемой базой данных (13), содержащей, по меньшей мере, местоположение упомянутого ближнего порога посадочной полосы (1).
6. Способ по п.1, отличающийся тем, что упомянутое расстояние (X) между упомянутым расчетным конечным положением (21) и упомянутым ближним концевым порогом (4) выбирают равным Х=(H/tgα) - D, в данном выражении, Н - высота летательного аппарата (2), tgα - тангенс угла захода на посадку α, а D - горизонтальное расстояние, отделяющее летательный аппарат (2) от ближнего концевого порога (4).
7. Способ по п.6, отличающийся тем, что для определения упомянутой возможности на основании упомянутого расчетного конечного положения (21) сравнивают упомянутое расстояние (X) между упомянутым расчетным конечным положением (21) и упомянутым ближним концевым порогом (4) с контрольным предельным значением (Т), ниже которого упомянутый летательный аппарат (2) должен быть способным полностью остановиться на упомянутой посадочной полосе (1) и сверх которого упомянутый летательный аппарат (2) не может остановиться на ней.
8. Способ по п.6, отличающийся тем, что для определения упомянутой возможности на основании упомянутого расчетного конечного положения (21) прибавляют расчетную посадочную дистанцию (F) к упомянутому расстоянию (X) между упомянутым расчетным конечным положением (21) и упомянутым ближним концевым порогом (4) и сравнивают сумму расстояний (X+F), полученную таким образом, с длиной (L) посадочной полосы (1).
9. Способ по одному из пп.7 или 8, отличающийся тем, что если упомянутое сравнение показывает, что полная остановка летательного аппарата (2) на посадочной полосе (1) невозможна, выдают сигнал тревоги для привлечения внимания экипажа летательного аппарата (2).
10. Способ по п.8, отличающийся тем, что если упомянутое сравнение показывает, что полная остановка летательного аппарата (2) на посадочной полосе (1) невозможна, выполняют уход на второй круг и автоматический повторный взлет летательного аппарата (2).
11. Способ по п.9, отличающийся тем, что если упомянутое сравнение показывает, что полная остановка летательного аппарата (2) на посадочной полосе (1) невозможна, выполняют уход на второй круг и автоматический повторный взлет летательного аппарата (2).
12. Способ по п.9, отличающийся тем, что запрещают сигнал тревоги, когда летательный аппарат (2) при посадке больше не в состоянии взлететь в полной безопасности.
13. Способ по одному из пп.10 или 11, отличающийся тем, что запрещают уход на второй круг, когда летательный аппарат (2) при посадке больше не в состоянии взлететь в полной безопасности.
14. Способ по п.1, отличающийся тем, что перед этапом а) проверяют в отношении посадочных полос, ближайших к летательному аппарату (2), те, на которых последний может предусмотреть выполнение посадки.
15. Система для реализации способа по п.1, позволяющая предсказать возможность полной остановки летательного аппарата (2) во время его посадки на посадочной полосе (1), в то время как упомянутый летательный аппарат (2) еще находится в полете и снижается по направлению к упомянутой посадочной полосе, следуя по наклонной траектории (3) захода на посадку, образующей угол захода на посадку (α) с упомянутой посадочной полосой (1), при этом упомянутая посадочная полоса содержит два концевых порога (4, 5), отличающаяся тем, что содержит вычислительные средства (6) принимающие:
высоту (Н) упомянутого летательного аппарата (2), снижающегося по направлению к упомянутой посадочной полосе (1) следуя по упомянутой наклонной траектории (3) захода на посадку, образующей угол захода на посадку (α) с упомянутой посадочной полосой (1);
информацию о местоположении упомянутого летательного аппарата (2) и
информацию о местоположении, по меньшей мере, ближнего концевого порога (4) упомянутой посадочной полосы (1);
расчетное конечное положение (21) для определения упомянутой возможности, вычисляющее:
горизонтальное расстояние (D), отделяющее упомянутый летательный аппарат (2) от упомянутого ближнего концевого порога (4) посредством местоположения летательного аппарата и местоположения упомянутого ближнего концевого порога (4); и
расстояние (X) относительно упомянутого ближнего концевого порога (4), определяющее упомянутое расчетное концевое положение (21) на основании высоты (Н), горизонтального расстояния (D) и упомянутого угла захода на посадку (α) для оценки того, должна ли посадка быть прервана.
16. Система по п.15, отличающаяся тем, что упомянутые вычислительные средства вычисляют расстояние (X) относительно упомянутого ближнего концевого порога (4) посредством уравнения X=(H/tgα)43.
17. Система по п.15 или 16 для реализации способа по п.8, отличающаяся тем, что упомянутые вычислительные средства (6) выполняют сравнение упомянутого вычисленного расстояния (X) с упомянутым контрольным предельным значением (Т) и формируют сигнал тревоги, когда упомянутое вычисленное расстояние (X) больше, чем упомянутое контрольное предельное значение (Т).
18. Система по п.15 или 16 для реализации способа по п.8, отличающаяся тем, что упомянутые вычислительные средства (6) производят сумму (X+F) упомянутого вычисленного расстояния (X) и упомянутой расчетной посадочной дистанции (F), затем сравнивают упомянутую сумму (X+F) с длиной (L) посадочной полосы и формируют сигнал тревоги, когда упомянутая сумма (X+F) больше, чем упомянутая длина (L) посадочной полосы (1).
19. Летательный аппарат, отличающийся тем, что он содержит систему по одному из пп.15-18.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| 0 |
|
SU157827A1 | |
| US 5142478 A, 25.08.1992 | |||
| US 4316252 A, 16.02.1982. | |||

