Настоящее изобретение касается способа и устройства поддержки посадки для летательного аппарата.
Известно, что в фазе захода на посадку перед направлением на посадку летательного аппарата на взлетно-посадочную полосу пилотирование последнего является особенно сложным. В этой фазе захода на посадку пилот располагает многочисленной информацией, некоторая из которой должна позволить ему избежать касания земли хвостом или крыльями, жесткой посадки или выхода за полосу. Среди этой информации фигурирует, в основном, скорость летательного аппарата, наклон летательного аппарата и высота летательного аппарата относительно земли, эти три вида информации отображаются в кабине летчиков, чтобы пилот мог легко их отследить. Кроме того, наблюдение за окружающей обстановкой создает его план захода на посадку.
Общий уровень энергии летательного аппарата, комбинация его скорости и его высоты является основным параметром оценки риска выхода за полосу. Во всяком случае, это не всегда оценивается пилотом. Более того, уровень энергии может быть изменен из-за ветра.
Объектом настоящего изобретения является таким образом информирование пилота об энергетическом состоянии его летательного аппарата в любой момент фазы захода на посадку.
Для этого в соответствии с изобретением способ поддержки посадки для летательного аппарата в фазе захода на посадку, находящегося на текущей высоте h и спускающегося к посадочной полосе с текущей скоростью V захода на посадку, причем текущая траектория движения образует с упомянутой посадочной полосой текущий угол захода на посадку γ, упомянутая текущая скорость захода на посадку V и упомянутый текущий угол захода на посадку γ должны быть идеально близки соответственно к постоянной опорной скорости Vr и постоянному опорному углу захода на посадку γr, связанных с этой посадочной полосой, отличается тем, что:
- предварительно определяют с одной и другой стороны упомянутой эталонной скорости Vr диапазон значений скорости захода на посадку, позволяющих осуществить полную остановку упомянутого летательного аппарата на упомянутой посадочной полосе в случае, когда текущий угол захода на посадку γ является, по меньшей мере, приблизительно равным упомянутому опорному углу захода на посадку γr, при этом упомянутый диапазон значений скорости захода на посадку ограничивается нижним предельным значением Vinf и верхним предельным значением Vsup;
- предварительно определяют с одной и другой стороны упомянутого опорного угла захода на посадку γr диапазон значений угла захода на посадку, позволяющих осуществить полную остановку упомянутого летательного аппарата на упомянутой посадочной полосе в случае, когда текущая скорость захода на посадку V является, по меньшей мере, приблизительно равной опорной скорости захода на посадку Vr, при этом упомянутый диапазон значений угла захода на посадку ограничивается нижним предельным значением γinf и верхним предельным значением γsup;
- вычисляют:
- нижний порог общей энергии Einf, соответствующий ситуации, в которой текущая скорость захода на посадку V и текущий угол захода на посадку γ соответственно равны упомянутому нижнему предельному значению Vinf и упомянутому нижнему предельному значению γinf,
- верхний порог общей энергии Esup, соответствующий ситуации, в которой текущая скорость захода на посадку V и текущий угол захода на посадку γ соответственно равны упомянутому верхнему предельному значению Vsup и упомянутому верхнему предельному значению γsup, и
- текущую общую энергию Е упомянутого летательного аппарата; и
- осуществляют сравнение упомянутой общей текущей энергии Е с упомянутыми нижним Einf и верхним Esup порогами общей энергии для получения индикации теоретической возможности для летательного аппарата остановиться на упомянутой посадочной полосе.
Настоящее изобретение использует тот факт, что с каждой посадочной полосой связан комплекс процедурных правил, которые касаются рекомендуемых (или обязательных) при посадке опорной скорости захода на посадку и опорного угла захода на посадку. Более того, в настоящем изобретении констатируется, что в гражданской транспортной авиации пилотирование летательных аппаратов осуществляется, насколько это возможно, с учетом этих правил посадки.
Таким образом, в соответствии с изобретением упомянутый нижний порог общей энергии, который предусматривает наименьшие возможные скорость захода на посадку и наклон захода на посадку, представляет собой минимальный уровень энергии для того, чтобы летательному аппарату удалось совершить корректную посадку. Напротив, для последней цели упомянутый верхний порог общей энергии, который учитывает наибольшие возможные скорость захода на посадку и наклон, составляет максимальный уровень энергии. Общая текущая энергия летательного аппарата будет располагаться между этими минимальным и максимальным уровнями общей энергии. Ниже минимального уровня общей энергии у летательного аппарата будет недостаток общей энергии, которую пилот будет должен восполнить воздействием на двигатели и/или управлением рулями высоты. Напротив, выше максимального уровня общей энергии общая энергия летательного аппарата избыточна и пилот должен погасить ее с помощью двигателей, рулями высоты, воздушными тормозами и т.д.
Само собой разумеется, сравнение общей текущей энергии Е с упомянутыми нижним Einf и верхним Esup порогами позволяет только определить возможность того, остановится летательный аппарат или нет: эффективная остановка летательного аппарата на полосе (с или без выхода за полосу) зависит от других обычных параметров, таких как состояние полосы (дождь, обледенение, …), состояние пневматиков шасси и т.д.
Сравнение между общей текущей энергией летательного аппарата, с одной стороны, и упомянутыми нижним Einf и верхним Esup порогами общей энергии может быть выполнено различными многочисленными путями.
Например, можно формировать следующий индекс I1:
индекс, который должен быть заключен между 0 и 1 для того, чтобы соответствовать приемлемому уровню энергии с точки зрения захода на посадку и корректной посадки.
Как вариант, можно:
- вычислить общую опорную энергию Er, соответствующую ситуации, в которой скорость захода на посадку и угол захода на посадку соответственно равны опорной скорости захода на посадку Vr и опорному углу захода на посадку γr; и
- осуществить сравнение между упомянутой общей текущей энергией Е и упомянутой общей опорной энергией Er, при этом результат этого сравнения будет сам сравнен, по меньшей мере, с одним из упомянутых нижним Einf и верхним Esup порогами.
В этом случае:
- если Е превышает Er, можно сравнить Е-Er с Esup-Er; и
- если Е ниже Er, можно сравнить Е-Er с Einf-Er.
Упомянутые предельные нижнее Einf и верхнее Esup значения скорости захода на посадку являются, предпочтительно, приблизительно равными упомянутой опорной скорости захода на посадку Vr, соответственно уменьшенной или увеличенной на несколько узлов (kts). Например, нижнее предельное значение Vinf может быть равно Vr-3kts, а верхнее предельное значение Vsup может быть равно Vr+10kts.
Подобным образом упомянутые предельные нижнее γinf и верхнее γsup значения угла захода на посадку являются, предпочтительно, приблизительно равными упомянутому опорному углу захода на посадку γr, соответственно уменьшенному или увеличенному на несколько десятых градуса. Например, в обычном случае, когда опорный угол захода на посадку составляет около 3°, нижнее и верхнее предельные значения могут быть равны γr -0,3° и γr +0,3°. Само собой разумеется, что отклонения угла выбраны в соответствии с разрешенными диапазонами для рассматриваемой посадочной полосы.
Результат упомянутого сравнения, который является характерным для факта того, что уровень общей энергии летательного аппарата является корректным, избыточным или недостаточным, может быть доведен до сведения пилота любым известным способом, таким как тревога или сигнализация, звуковые или визуальные, отображение и т.д. Таким образом, в необходимом случае пилот может попытаться, зная причину, скорректировать некорректный уровень энергии или даже выполнить маневр ухода на второй круг (go around). Для этого важно, чтобы результат сравнения отображался поблизости от пилота, в частности на обычном пилотажном экране, часто просматриваемом пилотом, таком как экран PFD (основной пилотажный индикатор).
Отметим, что изменение общей энергии летательного аппарата происходит относительно медленно, так что предпочтительно дополнительно предоставить пилоту более быстро тенденцию развития ситуации с его летательным аппаратом. Можно также предусмотреть связь упомянутого результата упомянутого сравнения общей энергии с информацией предсказания полной остановки летательного аппарата на упомянутой посадочной полосе, например, такой информацией, которая была выдана способом, описанным в заявке на французский патент № 0601395, поданной 17 февраля 2006 года.
Для осуществления способа в соответствии с настоящим изобретением можно использовать устройство, содержащее:
- средства вычисления:
- получающие, по меньшей мере, информацию, касающуюся текущей массы m, текущей высоты h, текущей скорости захода на посадку V и текущего угла захода на посадку γ летательного аппарата, а также нижнего предельного значения скорости Vinf, верхнего предельного значения скорости Vsup, нижнего предельного значения угла захода на посадку γinf и верхнего предельного значения угла захода на посадку γsup и в необходимом случае - опорной скорости захода на посадку Vr и опорного угла захода на посадку γr; и
- вычисляющие, по меньшей мере, один индекс, значение которого является характерным для факта того, что уровень упомянутой общей текущей энергии Е летательного аппарата является корректным, избыточным или недостаточным; и
- средства сравнения, сравнивающие упомянутый индекс, по меньшей мере, с одним значением порога, соответствующим переходу между корректным уровнем общей энергии и избыточным или недостаточным уровнем общей энергии, при этом упомянутые средства сравнения выполнены с возможностью включения, по меньшей мере, одного устройства тревоги или сигнализации, по меньшей мере, когда упомянутый уровень общей текущей энергии Е летательного аппарата является избыточным или недостаточным.
Фигуры прилагаемого чертежа позволят лучше понять осуществление изобретения. На этих фигурах идентичные ссылки обозначают похожие элементы.
Фиг.1 изображает схему, иллюстрирующую способ в соответствии с настоящим изобретением.
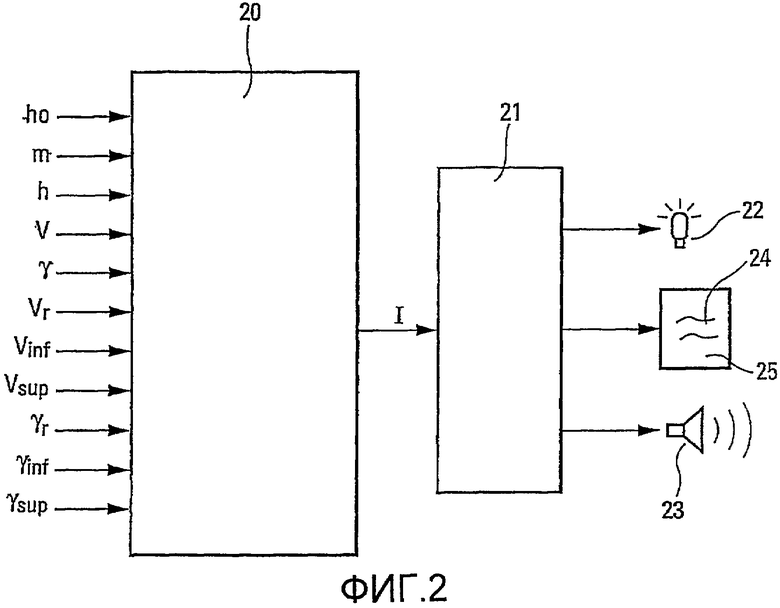
Фиг.2 изображает блок-схему устройства для осуществления способа по изобретению.
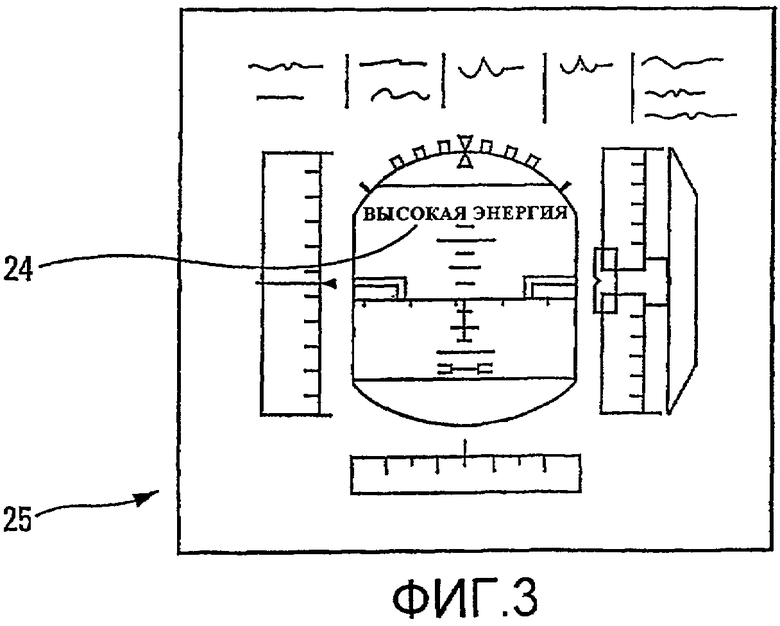
Фиг.3 изображает пример отображения сигнала тревоги, выдаваемого при осуществлении способа по изобретению.
В ситуации, схематично представленной на фиг.1, самолет 1 находится в фазе захода на посадку с целью приземления на посадочную полосу 2, полезная длина которой находится между ближним порогом Sp и дальним порогом Sd. Самолет 1 следует по текущей траектории 3 захода на посадку, имеющей текущий угол γ захода на посадку, спускаясь в направлении посадочной полосы 2 с текущей скоростью захода на посадку V. Когда самолет находится на горизонтальном расстоянии Х от упомянутого ближнего порога Sp, то есть на вертикали к точке 4 на земле 5, находящейся на расстоянии Х от ближнего порога Sp, его текущая высота на текущей траектории 3 равна h.
В соответствии с правилами процедуры посадки, привязанными к посадочной полосе 2, для оптимизации обеспечения корректной посадки текущая траектория 3 захода на посадку самолета 1 должна пройти через опорную точку Ро, находящуюся на регламентированной высоте ho над ближним порогом Sp и соответствующую началу выравнивания 6 траектории 3. Более того, в соответствии с правилами процедуры посадки самолет 1 идеально должен был бы находиться на опорной траектории захода на посадку 7, проходящей очевидно через опорную точку Ро и имеющей опорный угол захода на посадку γr, при этом скорость упомянутого самолета на упомянутой опорной траектории захода на посадку должна быть равна опорной скорости Vr захода на посадку. В такой идеальной ситуации летательный аппарат 1 должен был бы при исключении непредвиденных ситуаций остановиться, конечно, в точке 8 полосы 2, удаленной от ближнего порога Sp полосы 2 на расстояние l, меньшее полезной длины L последней. На вертикали к упомянутой точке 4 высота упомянутой опорной траектории 7 захода на посадку обозначена как hr.
В соответствии с настоящим изобретением для того, чтобы предсказать, что самолет при его текущей скорости V захода на посадку и текущим наклоном γ имеет возможность полностью остановиться на полосе 2, начинают:
- предварительно определять (на фиг.1 не представлено) с одной и другой стороны опорной скорости захода на посадку Vr диапазон значений скорости захода на посадку, позволяющих осуществить полную остановку самолета 1 на полосе 2 в случае, когда текущий угол γ захода на посадку является, по меньшей мере, приблизительно равным опорному углу γr захода на посадку, при этом упомянутый дипазон значений скорости захода на посадку ограничивается нижним предельным значением Vinf и верхним предельным значением Vsup; и
- предварительно определять с одной и другой стороны упомянутого опорного угла γr захода на посадку диапазон 10 значений угла захода на посадку, позволяющих осуществить полную остановку самолета 1 на полосе 2 в случае, когда текущая скорость V захода на посадку является, по меньшей мере, приблизительно равной опорной скорости Vr захода на посадку, при этом упомянутый диапазон 10 ограничен нижним предельным значением γinf, соответствующим нижней предельной траектории 11 захода на посадку, и верхним предельным значением γsup, соответствующим верхней предельной траектории 12 захода на посадку. По вертикали от указанной точки 4 высоты упомянутых верхней и нижней предельных траекторий 11 и 12 захода на посадку соответственно обозначены как hinf и hsup.
После предварительного определения этих двух диапазонов значений скорости захода на посадку и угла захода на посадку вычисляют:
- общую текущую энергию Е самолета 1 по текущей траектории 3 захода на посадку, которая равна
где h известна на борту самолета 1, m является массой последнего, а g - ускорением силы тяжести;
- нижний порог общей энергии Einf, соответствующий ситуации, при которой скорость и угол захода на посадку самолета 1 были бы соответственно равны нижнему предельному значению Vinf и нижнему предельному значению γinf, при этом нижний порог будет таким образом равен:

где tan γinf является тангенсом нижнего предельного значения γinf угла захода на посадку, а расстояние Х равно h/tanγ, где tanγ является тангенсом текущего угла γ захода на посадку; и
- верхний порог общей энергии Esup, соответствующий ситуации, в которой скорость и угол захода на посадку самолета 1 были бы соответственно равны верхнему предельному значению Vsup и верхнему предельному значению γsup, при этом упомянутый порог таким образом равен:

где tan γsup является тангенсом верхнего предельного значения γsup угла захода на посадку.
Затем сравнивают общую текущую энергию Е самолета 1 с упомянутыми нижним и верхним порогами общей энергии Einf и Esup.
Для этого можно определить индекс I1, данный в выражении:
Видно, что:
- если I1 больше 1, общая текущая энергия Е самолета 1 сильно завышена и реален риск продольного выхода за посадочную полосу;
- если I1 меньше 0, общая текущая энергия Е самолета 1 является очень заниженной и последний рискует попасть за ближний порог полосы Sp; и
- напротив, если I1 заключен между 0 и 1, общая текущая энергия Е самолета 1 соответствует хорошо выполненному сближению, позволяющему осуществить остановку самолета 1 на полосе 2.
Из сравнения общей текущей энергии Е с упомянутыми верхним и нижним порогами энергии Einf и Esup видно, что можно, в качестве варианта, перейти с помощью общей опорной энергии Er, соответствующей ситуации, в которой скорость захода на посадку и угол захода на посадку самолета 1 соответственно равны, к опорной скорости захода на посадку Vr и опорному углу захода на посадку γr. Эта общая опорная энергия равна:

где tan γr является тангенсом опорного угла захода на посадку γr.
В случае, когда Е превышает Er, можно определить индекс
который должен оставаться меньше 1 для того, чтобы соответствовать корректному заходу на посадку. Если I2 превышает 1, самолет 1 имеет избыток энергии, не позволяющий ему остановиться на полосе 2.
В случае, когда E меньше Er, можно определить индекс
который должен быть больше 1 для того, чтобы соответствовать корректному заходу на посадку самолета 1 на полосу 2. Если I3 меньше 1, общей энергии самолета 1 недостаточно для корректного захода на посадку на полосу 2.
Для осуществления вычислений и упомянутых выше сравнений можно использовать устройство, изображенное на фиг.2. Это устройство содержит вычислитель 20, принимающий на своих входах регламентируемую высоту ho опорной точки Ро, массу m, высоту h, текущую скорость захода на посадку V, текущий угол захода на посадку γ, нижнее предельное значение скорости Vinf, верхнее предельное значение скорости Vsup, нижнее предельное значение угла захода на посадку γinf и верхнее предельное значение угла захода на посадку γsup. Вычислитель 20 может, кроме того, получать на свои входы опорную скорость захода на посадку Vr и опорный угол захода на посадку γr.
С помощью выражений (1), (2), (3) и (4) вычислитель 20 вычисляет общую текущую энергию Е, нижний порог общей энергии Einf и верхний порог общей энергии Esup. Он может, кроме того, вычислять индекс I1. С помощью выражений (5), (6) и (7) вычислитель 20 может, в качестве варианта, вычислять общую опорную энергию Er и индексы I2 и I3.
Вычислитель 20 передает индекс I, характерный для индекса I1 или индексов I2 и I3, на блок сравнения 21 (который может входить в состав упомянутого вычислителя 20) для сравнения значения упомянутого индекса I с, по меньшей мере, одним порогом (равным 0 или 1, как это вытекает из предшествующего) и активирования тревоги или визуальных 22 и/или звуковых 23 сигнализаций и/или для отображения тревожных или сигнальных сообщений 24 на экранах 25 в случае, когда значение индекса I указывает на превышение или недостаток энергии, не позволяющие самолету осуществить корректные заход на посадку и посадку.
На фиг.3 в качестве экрана 25 изображен экран PFD (основной полетный индикатор), на котором отображено сообщение 24 «высокая энергия», информирующая пилота о том, что энергия его самолета избыточна для корректной посадки. Само собой разумеется, в случае недостатка энергии сообщение 24 может быть, например, «низкая энергия».
Когда она соответствует норме, уровень общей энергии может быть отображен на экране 24 как «корректная энергия».
Изобретение относится к способу и устройству поддержки летательных аппаратов во время посадки. Способ дает возможность вычислять диапазоны значений скорости и угла захода на посадку, позволяющих осуществить полную остановку летательного аппарата, находить нижний и верхний пороги общей энергии, приемлемой для летательного аппарата, и сравнивать общую текущую энергию летательного аппарата с порогами для получения индикации о теоретической возможности остановки летательного аппарата на посадочной полосе. Устройство содержит вычислительные средства, получающие информацию о текущих параметрах и вычисляющие индекс, значение которого указывает на уровень общей энергии, средства сравнения, сравнивающие индекс с пороговым значением, соответствующим переходу между правильным и избыточным уровнем общей энергии. Достигается информирование пилота об энергетическом состоянии летательного аппарата в любой момент фазы захода на посадку. 2 н. и 8 з.п. ф-лы, 3 ил.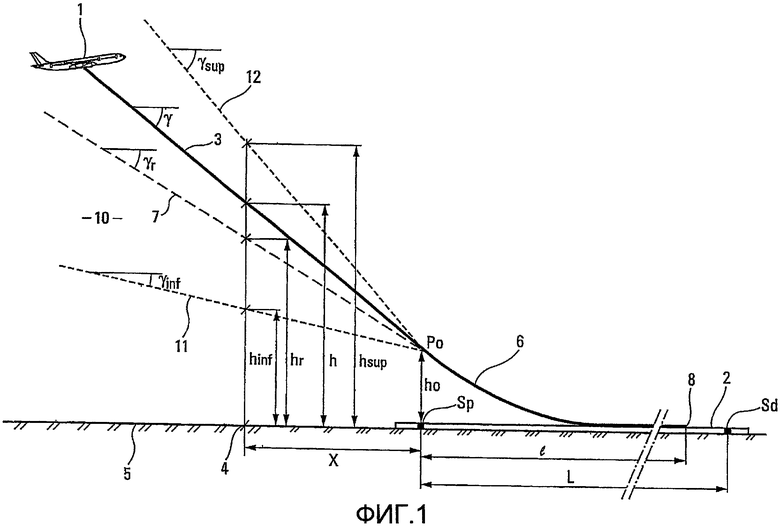
1. Способ поддержки посадки для летательного аппарата (1) в фазе захода на посадку, находящегося на текущей высоте h и спускающегося к посадочной полосе (2), следующего с текущей скоростью захода на посадку V по текущей траектории захода на посадку (3), образующий с упомянутой посадочной полосой (2) текущий угол захода на посадку γ, при этом упомянутая текущая скорость захода на посадку V и упомянутый текущий угол захода на посадку γ должны быть идеально близки соответственно к опорной постоянной скорости захода на посадку Vr и к опорному постоянному углу захода на посадку γr, связанными с упомянутой посадочной полосой (2), в котором предварительно определяют с одной и другой стороны упомянутой опорной скорости захода на посадку Vr диапазон значений скорости захода на посадку, позволяющих осуществить полную остановку упомянутого летательного аппарата (1) на упомянутой посадочной полосе (2) в случае, когда текущий угол захода на посадку γ является, по меньшей мере, приблизительно равным упомянутому опорному углу захода на посадку γr, при этом упомянутый диапазон значений скорости захода на посадку ограничивается нижним предельным значением Vinf и верхним предельным значением Vsup, предварительно определяют с одной и другой стороны упомянутого опорного угла захода на посадку γr диапазон (10) значений угла захода на посадку, позволяющих осуществить полную остановку упомянутого летательного аппарата (1) на упомянутой посадочной полосе (2) в случае, когда текущая скорость захода на посадку V является, по меньшей мере, приблизительно равной опорной скорости захода на посадку Vr, причем упомянутый диапазон (10) значений угла захода на посадку ограничивается нижним предельным значением γinf и верхним предельным значением γsup, вычисляют нижний порог общей энергии Einf, соответствующий ситуации, в которой текущая скорость захода на посадку V и текущий угол захода на посадку г соответственно равны упомянутому нижнему предельному значению Vinf и упомянутому нижнему предельному значению γinf, верхний порог общей энергии Esup, соответствующий ситуации, в которой текущая скорость захода на посадку V и текущий угол захода на посадку γ соответственно равны упомянутому верхнему предельному значению Vsup и упомянутому верхнему предельному значению γsup, и общую текущую энергию упомянутого летательного аппарата, и осуществляют сравнение упомянутой общей текущей энергии Е с упомянутыми нижним Einf и верхним Esup порогами общей энергии для получения индикации о теоретической возможности для упомянутого летательного аппарата остановиться на упомянутой посадочной полосе.
2. Способ по п.1, в котором для осуществления упомянутого сравнения вычисляют индекс I1 из выражения 
3. Способ по п.1, в котором вычисляют общую опорную энергию Er, соответствующую ситуации, в которой скорость захода на посадку и угол захода на посадку соответственно равны опорной скорости захода на посадку Vr и опорному углу захода на посадку γr, и осуществляют сравнение между упомянутой общей текущей энергией Е и упомянутой общей опорной энергией Er, при этом результат этого сравнения сам сравнивается, по меньшей мере, с одним из упомянутых нижним Einf и верхним Esup порогов общей энергии.
4. Способ по п.3, в котором если Е превышает Er, можно сравнивать Е-Er с Esup-Er, и если Е ниже Er, можно сравнивать Er-Е с Er-Einf.
5. Способ по п.1, в котором упомянутые нижнее Vinf и верхнее Vsup предельные значения скорости захода на посадку являются, предпочтительно, по меньшей мере, приблизительно равными упомянутой опорной скорости захода на посадку Vr, соответственно уменьшенной или увеличенной на несколько узлов.
6. Способ по п.1, в котором упомянутые нижнее γinf и верхнее γsup предельные значения угла захода на посадку являются, по меньшей мере, приблизительно равными упомянутому опорному углу захода на посадку γr, соответственно уменьшенному или увеличенному на несколько десятых градуса.
7. Способ по п.1, в котором результат упомянутого сравнения отображается поблизости от пилота летательного аппарата.
8. Способ по п.1, в котором информацию предсказания полной остановки летательного аппарата на упомянутой посадочной полосе связывают с упомянутым результатом сравнения.
9. Устройство для осуществления способа по п.1, которое содержит вычислительные средства (20), получающие, по меньшей мере, информацию, касающуюся текущей массы m, текущей высоты h, текущей скорости захода на посадку V и текущего угла захода на посадку γ летательного аппарата (1), а также нижнего предельного значения скорости Vinf, верхнего предельного значения скорости Vsup, нижнего предельного значение угла захода на посадку γinf и верхнего предельного значения угла захода на посадку γsup, и, в случае необходимости, опорной скорости захода на посадку Vr и опорного угла захода на посадку γr, и вычисляющие, по меньшей мере, один индекс (I1, I2, I3), значение которого указывает на то, что уровень упомянутой общей текущей энергии (Е) летательного аппарата (1) является правильным, избыточным или недостаточным, и средства сравнения (21), сравнивающие упомянутый индекс (I1, I2, I3), по меньшей мере, с одним пороговым значением, соответствующим переходу между правильным уровнем общей энергии и избыточным или недостаточным уровнем общей энергии, при этом упомянутые средства сравнения выполнены с возможностью включения, по меньшей мере, одного устройства тревоги или сигнализации (22, 23, 25), по меньшей мере, в случае, когда упомянутый уровень общей текущей энергии Е летательного аппарата (1) избыточен или недостаточен.
10. Устройство по п.9, в котором, по меньшей мере, одно устройство (25) тревоги или сигнализации содержит один стандартный пилотажный экран, на который выводится сообщение (24) тревоги или сигнализации, касающееся упомянутого уровня общей текущей энергии под воздействием упомянутых средств сравнения (21).
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ САМОЛЕТА | 1992 |
|
RU2025414C1 |
| Система ориентации и стабилизации | 1981 |
|
SU966669A1 |
| US 200475586 А1, 22.04.2004. | |||

