Группа изобретений относится к беспилотным авиационным комплексам (БАК), использующим беспилотный привязной летательный аппарат (БПЛА) вертикального взлета и посадки и предназначенным для наблюдения с неподвижной или движущейся наземной станции.
Известны беспилотные летательные аппараты, например привязной вертолет, управляемый дистанционно с наземной станции комплекса (ФРГ №2444775, В64С 27/04; B64F 3/00, публикация 28.07.1977). Вертолет имеет устройство для автоматической стабилизации его положения в полете, включающееся с помощью коммутационного устройства, которое выдает сигнал на переключение стабилизирующего устройства на различные режимы работы в зависимости от длины смотанного с барабана привязного каната. Недостатком данного привязного беспилотного летательного аппарата является сложность его системы управления и стабилизации, обусловленная изменением положения центра тяжести системы «БПЛА-привязь» при перемещениях БПЛА по горизонтали и изменениях ветровых нагрузок на БПЛА.
Известен также беспилотный авиационный комплекс фирмы «Израел Аэроспэйс Индастриз ЛТД» (WO 2007/141795 A1, B64C 27/20, 13.12.2007), принятый в качестве наиболее близкого аналога заявляемого устройства, включающий наземную станцию и беспилотный привязной летательный аппарат в виде платформы, несущей полезную нагрузку и движитель в виде четырех вентиляторов с электроприводом. Привязь, связывающая наземную станцию с платформой беспилотного летательного аппарата, состоит из силового троса и многофункционального кабеля, обеспечивающего электрическую связь и связь управления. Воздушные винты вентиляторов обеспечивают вертикальную подъемную силу и позволяют поддерживать заданную высоту платформы на режиме висения и полета. Винты вентиляторов могут выполняться с изменяемым углом установки лопастей или снабжаться щитками регулируемого отклонения для изменения пространственного положения БПЛА.
Недостатком комплекса является его высокая стоимость из-за сложности системы управления и стабилизации привязной платформы БПЛА и элементов системы управления. Использование свободной привязи беспилотного летательного аппарата требует сложной системы отслеживания пространственного положения платформы и управления им. Сложность системы управления и стабилизации положения беспилотного летательного аппарата (в случае изменения положения центра тяжести системы «беспилотный летательный аппарат - привязь» при перемещениях беспилотного летательного аппарата по горизонтали или при изменениях ветровых нагрузок на БПЛА) обусловлена наличием управляющих щитков и системы управления положением управляющих щитков (39) (в соответствии с одним из вариантов выполнения БПЛА) или наличием автомата перекоса несущего винта или аэродинамических рулей (в случае использования вертолетных агрегатов в другом варианте устройства). Сложность конструкции приводит к повышению веса БПЛА, стоимости комплекса и снижению его надежности.
Способ управления беспилотным летательным аппаратом комплекса по патенту WO 2007/141795, являющийся ближайшим аналогом заявляемого способа, включает подъем и спуск беспилотного летательного аппарата на свободной привязи на заданную высоту за счет управления режимом работы воздушных винтов и управление и стабилизацию беспилотным летательным аппаратом в режиме висения или полета на заданной высоте с использованием датчиков пространственного положения летательного аппарата (или заданной компьютерной программы). Управляющие сигналы корректируют положение управляемых щитков (39) воздушных винтов (36) или регулируют скорости вращения винтов (36) вентиляторов, а также контролируют длину привязи (50) воздействием на привод барабана (80) в соответствии с режимом висения или перемещения в полетном режиме.
Недостатком способа является сложность управления пространственным положением БПЛА, связанная с необходимостью многофакторной отработки сигналов датчиков, в том числе с учетом длины свободной привязи и подъемной силы летательного аппарата, связанная с этим недостаточная надежность, а также высокая стоимость оборудования для его реализации.
Задачей заявляемой группы изобретений: способа управления беспилотным привязным летательным аппаратом и беспилотного авиационного комплекса, объединенных общим изобретательским замыслом, является упрощение способа управления и его реализации, а также упрощение конструкции элементов комплекса с привязным беспилотным летательным аппаратом, снижение веса и стоимости, а также повышение надежности системы управления и стабилизации беспилотного летательного аппарата комплекса.
Поставленная задача решена благодаря тому, что в способе управления беспилотным привязным летательным аппаратом, включающим его подъем на заданную высоту, управление положением и стабилизацию беспилотного летательного аппарата с использованием датчиков его пространственного положения, обеспечивают режим беспилотного летательного аппарата, при котором его подъемная сила превышает вес летательного аппарата вместе с привязью, при этом высоту подъема беспилотного летательного аппарата задают длиной силового троса, а управление положением и стабилизацию беспилотного летательного аппарата осуществляют с помощью отдельного управляющего троса, длину которого изменяют по сигналу датчиков пространственного положения беспилотного летательного аппарата.
При этом в беспилотном авиационном комплексе, содержащем наземную станцию, беспилотный летательный аппарат с движителем и его приводом, привязь, включающую силовой трос, связывающий наземную станцию с беспилотным летательным аппаратом, и многофункциональный кабель, а также механизм для регулирования длины привязи, и систему управления положением и стабилизации беспилотного летательного аппарата, включающую датчики его пространственного положения, в соответствии с заявляемым устройством система управления положением и стабилизации беспилотного летательного аппарата выполнена в виде хотя бы одного управляющего троса и механизма для регулирования длины управляющего троса, установленных с возможностью изменения углового положения беспилотного летательного аппарата при изменении длины управляющего троса, при этом привод механизма для регулирования длины управляющего троса связан с датчиками пространственного положения беспилотного летательного аппарата.
В беспилотном авиационном комплексе механизм для регулирования длины управляющего троса может быть установлен на наземной станции. В другом примере выполнения беспилотного авиационного комплекса управляющий трос присоединен к силовому тросу, а механизм для регулирования длины управляющего троса установлен в носовой части беспилотного летательного аппарата. При этом управляющий трос может быть присоединен к силовому тросу через жесткий элемент.
Механизм для регулирования длины привязи беспилотного летательного аппарата снабжен тормозным устройством, обеспечивающим постоянный натяг силового троса. Силовой трос связан с беспилотным летательным аппаратом через шарнирный механизм. В качестве датчика пространственного положения беспилотного летательного аппарата может использоваться размещенный на силовом тросе датчик вертикали силового троса. Беспилотный летательный аппарат может быть снабжен управляемыми или неуправляемыми аэродинамическими поверхностями для обеспечения его ориентации по направлению воздушного потока, связанного с движением наземной станции или направлением ветра, а также, по крайней мере, одним дополнительным движителем для его горизонтального перемещения.
Способ управления привязного беспилотного летательного аппарата основан на изменении его пространственного положения с помощью отдельного троса управления, соединяющего корпус летательного аппарата с силовым тросом привязи или с наземной станцией. При этом высота беспилотного летательного аппарата определяется заданной длиной силового троса привязи благодаря обеспечению превышения подъемной силы беспилотного летательного аппарата над его весом вместе с привязью в полетном режиме. Использование силового троса привязи, соединяющей беспилотный летательный аппарат с наземной станцией, для задания высоты подъема летательного аппарата в полетном режиме, включая режим висения, позволяет таким образом, при соответственно подобранной величине подъемной силы движителя летательного аппарата, стабилизировать его положение по высоте.
При этом управление угловым положением беспилотного летательного аппарата, преимущественно изменение угла между его продольной осью и горизонтальной плоскостью (угла тангажа), осуществляют с использованием отдельного управляющего троса путем изменения его длины с помощью отдельного барабанного механизма. При необходимости может использоваться второй управляющий трос для аналогичного управления углом крена, например, в случае недостаточного влияния аэродинамических поверхностей для стабилизации углового положения беспилотного летательного аппарата по крену.
Датчики пространственного положения беспилотного летательного аппарата при этом могут использоваться для соответствующего автоматического изменения длины управляющего троса (тросов), достаточного для коррекции углового положения продольной и/или поперечной оси летательного аппарата относительно горизонтальной плоскости. Сигналы с выходов датчиков пространственного положения, в частности датчика углового положения силового троса и/или датчика углового положения корпуса беспилотного летательного аппарата, через блоки их обработки и усиления подают на привод барабанного механизма для изменения длины управляющего троса.
Использование в качестве средства реализации способа управляющего троса (тросов) позволяет упростить способ управления беспилотным авиационным комплексом благодаря отказу от сложных операций, связанных, в частности, с управлением сложными вертолетными агрегатами и/или с использованием дорогостоящих программ по обработке сигналов датчиков пространственного положения беспилотного летательного аппарата.
Для реализации заявленного способа управления беспилотным летательным аппаратом авиационный комплекс снабжен дополнительно, по крайней мере, одним управляющим тросом, который присоединен к летательному аппарату, и барабанным механизмом для регулирования длины управляющего троса, которые установлены таким образом, чтобы при изменении длины управляющего троса корректировался угол наклона летательного аппарата. Для управления углом тангажа этот трос должен быть связан с летательным аппаратом со смещением относительно центра тяжести последнего, и точка соединения троса с корпусом летательного аппарата должна располагаться на его продольной оси в носовой части.
Механизм, регулирующий длину управляющего троса, может располагаться на наземной станции или в носовой части летательного аппарата. В последнем случае управляющий трос должен крепиться непосредственно к натянутому силовому тросу или через закрепленный на силовом тросе жесткий элемент, служащий для снижения влияния изгиба силового троса.
Использование силового троса привязи позволяет задать высоту летательного аппарата в соответствии с длиной силового троса, а пространственное положение летательного аппарата при необходимости, например в случае ветровых нагрузок или передвижений наземной станции, корректируется с помощью управляющего троса путем изменения его длины в зависимости от сигналов, получаемых от одного или нескольких датчиков пространственного положения летательного аппарата.
Для обеспечения стабильного и достаточного натяга силового троса, уменьшающего его изгибную деформацию, силовой трос целесообразно выполнить малорастяжимым, а механизм наземной станции для регулирования длины привязи снабдить тормозным устройством силового троса, например, фрикционного типа. Для уменьшения воздействия углового положения корпуса беспилотного летательного аппарата на силовой трос последний может быть связан с корпусом беспилотного летательного аппарата через промежуточный шарнирный механизм.
Датчики пространственного положения того или другого известного типа могут соответственно размещаться непосредственно на летательном аппарате и/или на наземной станции, а также на силовом тросе привязи. Сигналы датчиков пространственного положения через усилитель передаются на привод барабанного механизма для регулирования длины управляющего троса.
Для обеспечения аэродинамической устойчивости и стабилизации положения беспилотного летательного аппарата он может быть снабжен килем и крыльями, которые обеспечат его ориентацию по направлению воздушного потока, связанного с движением наземной станции или направлением ветра. Указанные аэродинамические поверхности могут выполняться управляемыми или неуправляемыми. Беспилотный летательный аппарат может также быть снабжен дополнительным воздушным винтом для его горизонтального перемещения.
Предложенная система и конструкция элементов беспилотного авиационного комплекса отличаются простотой реализации при достаточной надежности, малым весом, невысокой стоимостью.
Способ управления привязным беспилотным летательным аппаратом и беспилотный авиационный комплекс поясняются чертежами, на которых изображены
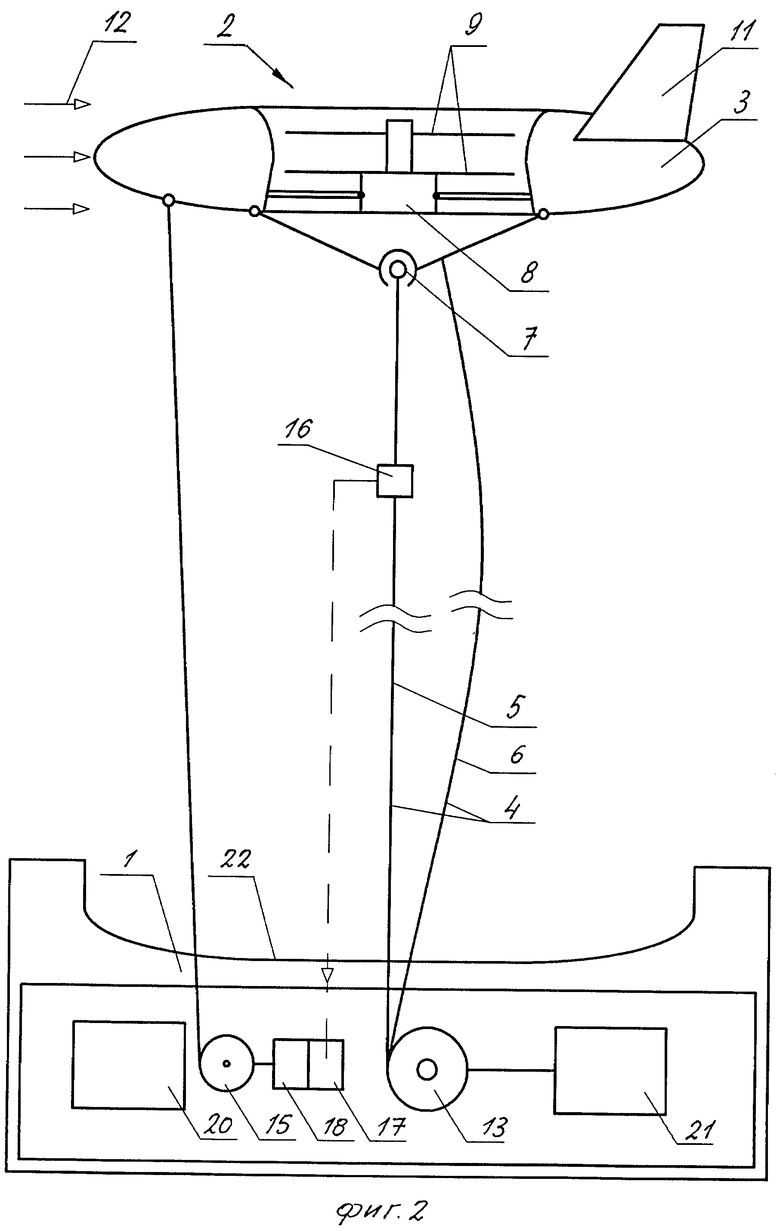
на фиг.1 - беспилотный авиационный комплекс с беспилотным летательным аппаратом, находящимся в режиме полета, при размещении механизма изменения длины управляющего троса в носовой части беспилотного летательного аппарата;
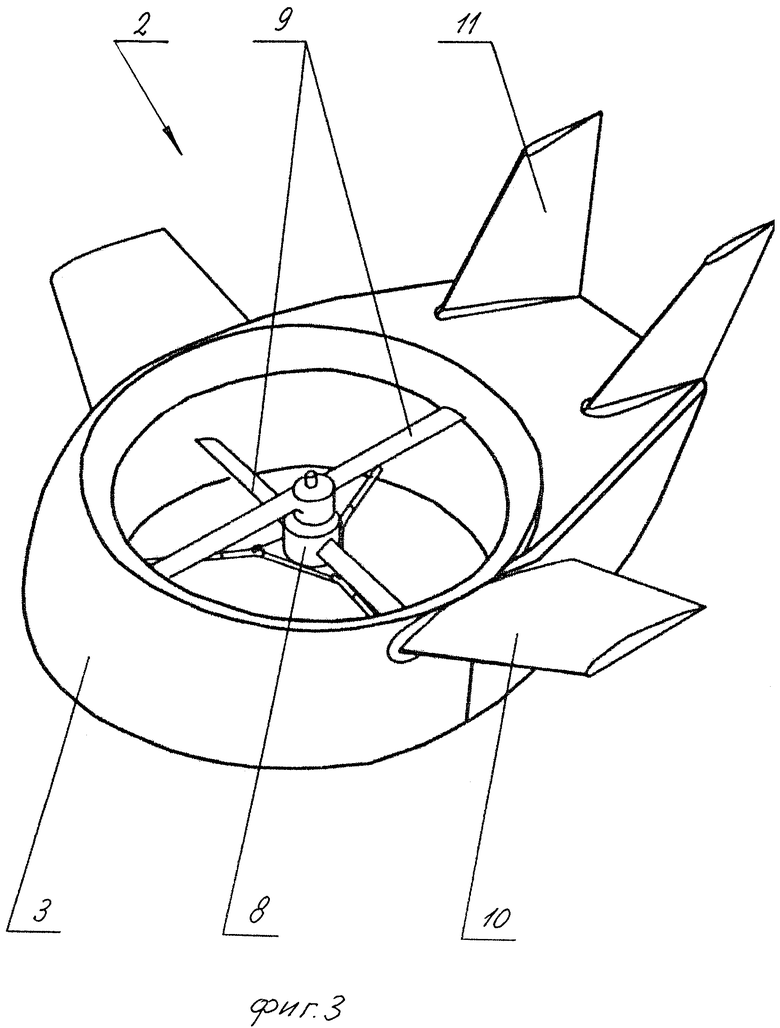
на фиг.2 - то же, при размещении механизма изменения длины управляющего троса на наземной станции;
на фиг.3 - общий вид беспилотного летательного аппарата.
Беспилотный авиационный комплекс содержит наземную станцию 1 и беспилотный летательный аппарат 2, корпус 3 которого связан с наземной станцией 1 привязью 4, которая включает силовой трос 5 и многофункциональный кабель 6 (фиг.1, 2). Силовой трос 5 связан с корпусом 3 беспилотного летательного аппарата 2 через шарнирный механизм 7. Многофункциональный кабель 6 привязи 4 может механически соединяться с малорастяжимым силовым тросом 5 или быть независимым от него и служит для обеспечения электропитанием электродвигателя 8 и приборов полезной нагрузки на беспилотном летательном аппарате 2, а также для обеспечения интерфейса между беспилотным летательным аппаратом и наземной станцией 1.
В качестве привода силовой установки беспилотного летательного аппарата могут, например, использоваться биротативный электродвигатель 8 с двумя закапотированными соосными винтами 9 постоянного шага в качестве движителей: один из винтов 9 соединен с ротором, а другой винт 9 - со статором биротативного электродвигателя 8 без применения редукторов.
В качестве движителей могут использоваться несущие винты или вентиляторы, а привод движителя может включать один или несколько двигателей. Количество винтов и двигателей силовой установки летательного аппарата при необходимости может быть увеличено.
На платформе корпуса 3 беспилотного летательного аппарата (как внутри, так и снаружи) в качестве полезной нагрузки могут быть размещены различные системы, обеспечивающие наблюдение за внешней обстановкой (не показаны).
Беспилотный летательный аппарат 2 выполнен с неуправляемыми аэродинамическими поверхностями: консолями крыла 10 и килями 11 (фиг.3); обеспечивающими его ориентацию по направлению воздушного потока 12, связанного с направлением ветра и/или перемещением наземной станции 1. Аэродинамические поверхности могут быть выполнены при необходимости управляемыми.
На наземной станции 1 установлен механизм 13, например, барабанного типа для регулирования длины привязи 4 БПЛА. Привод барабанного механизма 13 для притягивания беспилотного летательного аппарата может быть электрическим или ручным. Барабанный механизм 13 регулирования длины привязи 4 снабжен тормозным устройством (не показан), обеспечивающим постоянный натяг силового троса 5 при наматывании/сматывании привязи 4.
Система управления положением и стабилизации беспилотного летательного аппарата 2 содержит по крайней мере один управляющий трос 14, связанный с корпусом 3 беспилотного летательного аппарата и снабженный механизмом 15, например, барабанного типа для регулирования длины управляющего троса 14 (фиг.1, 2).
Датчики известных конструкций (например, датчики измерения углового положения) для определения пространственного положения беспилотного летательного аппарата могут соответственно располагаться на корпусе 3 беспилотного летательного аппарата 2 и/или на наземной станции 1. В предлагаемом примере выполнения комплекса для определения положения БПЛА в качестве датчика пространственного положения на силовом тросе 5 установлен датчик 16 вертикали или углового положения силового троса 5. Датчики положения БПЛА, в частности датчик 16, через управляющее устройство, например усилитель 17, соединены с двигателем 18 привода барабанного механизма 15 для регулирования длины управляющего троса 14. Управляющий трос 14 присоединен к корпусу 3 в носовой части беспилотного летательного аппарата 2 и предназначен для изменения положения беспилотного летательного аппарата относительно поперечной оси (угла тангажа). Барабанный механизм 15 изменения длины управляющего троса 14 может быть установлен как на наземной станции 1 (фиг.2), так и в носовой части беспилотного летательного аппарата 2 (фиг.1). В последнем случае конец управляющего троса 14 целесообразно прикрепить к силовому тросу 5, например, с помощью жесткого элемента 19. Датчик 16 углового положения силового троса 5 привязи 4 также может быть установлен на жестком элементе 19.
С целью уменьшения веса многофункционального кабеля 6 привязи 4 на наземной станции 1 может использоваться преобразователь энергии 20, обеспечивающий повышение напряжения и частоты переменного тока, поступающего по кабелю 6. На наземной станции 1 расположены также пульт управления комплексом 21 и ложемент 22, предназначенный для размещения, транспортировки и хранения беспилотного летательного аппарата 2. Беспилотный летательный аппарат 2 может быть снабжен по крайней мере одним дополнительным движителем (не показан), который предназначен для горизонтального перемещения беспилотного летательного аппарата. Дополнительный движитель может быть выполнен в виде воздушного винта или вентилятора, а в качестве его привода может использоваться отдельный двигатель. Наземная станция может быть стационарной или мобильной.
Способ управления привязным беспилотным летательным аппаратом в составе комплекса осуществляется следующим образом.
Беспилотный авиационный комплекс обеспечивает запуск беспилотного летательного аппарата 2. При включении оператором с пульта управления 21 на наземной станции 1 электродвигателя 8 силовой установки и превышении подъемной силы соосных несущих винтов 9 веса летательного аппарата 2, последний начинает подниматься вверх, вытягивая с барабанного механизма 13, расположенного на наземной станции 1, силовой трос 5 и многофункциональный кабель 6 привязи 4. Конструкция барабанного механизма 13 с тормозным устройством, не показанным на чертеже, выполнена так, чтобы силовой трос 5 привязи 4 постоянно находился в натянутом положении при изменении высоты висения беспилотного летательного аппарата 2. Высота висения беспилотного летательного аппарата 2 (или платформы с оборудованием систем наблюдения целевой нагрузки) задается регулированием длины силового троса 5 с пульта управления 21 оператором комплекса.
При достижении летательным аппаратом 2 заданной высоты висения оператором с помощью установленного на беспилотном летательном аппарате оборудования осуществляется наблюдение за окружающим наземную станцию 1 пространством. В отсутствие ветровых нагрузок беспилотный летательный аппарат 2 в режиме висения располагается практически вертикально над наземной станцией 1, удерживаемый натянутым малорастяжимым силовым тросом 5 привязи 4. При воздействии ветра или воздушных нагрузок, связанных с передвижением наземной станции 1, управление и стабилизация положения привязного беспилотного летательного аппарата 2 осуществляется автоматически с помощью управляющего троса 14. В зависимости от воздействия воздушного потока 12 на беспилотный летательный аппарат 2 (при его кабрировании либо пикировании) соответственно изменяются параметры сигналов датчиков, в частности датчика 16 вертикали (углового положения) силового троса 5. Датчик 16 через усилитель 17 связан с электрическим двигателем 18 привода барабанного механизма 15, который, вращая находящийся на его оси барабан, наматывает/сматывает с него управляющий трос 14, обеспечивая соответственное уменьшение/увеличение длины троса 14. При этом изменяется угловое положение беспилотного летательного аппарата 2 относительно горизонтали и происходит его стабилизация относительно воздушного потока 12.
При завершении работы комплекса по сигналу оператора с пульта управления 21 на привод барабанного механизма 13 регулирования длины привязи 4 осуществляется притягивание силовым тросом 5 беспилотного летательного аппарата 2 к наземной станции 1. Электродвигатель 8 привода движителя беспилотного летательного аппарата 2 при этом процессе не отключается. Беспилотный летательный аппарат 2 при достижении наземной станции 3 размещается и фиксируется в ложементе 22, предназначенном для его транспортировки и хранения. При этом электродвигатель 8 привода винтов 9 отключается автоматически или оператором комплекса.
Использование предлагаемой конструкции БАК и предлагаемого способа управления БПЛА позволяют упростить структуру комплекса и его системы управления, отказаться от использования типовых вертолетных агрегатов в БПЛА, уменьшить вес БПЛА и БАК, увеличить долю полезной нагрузки и уменьшить стоимость БАК.
Благодаря простоте конструкции БАК может быть реализован в виде мобильного переносного комплекса, который может переноситься и эксплуатироваться одним/двумя операторами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| БЕСПИЛОТНЫЙ ПРИВЯЗНОЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2018 |
|
RU2683133C1 |
| СПОСОБ УПРАВЛЕНИЯ МАРШРУТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2751367C1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2403182C1 |
| СИСТЕМА ВОЗДУШНОГО НАБЛЮДЕНИЯ | 2010 |
|
RU2428355C1 |
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |
| Пост наблюдения на базе привязного беспилотного летательного аппарата | 2023 |
|
RU2807768C1 |
| Способ защиты наземных объектов от самонаводящихся на инфракрасное излучение высокоточных боеприпасов | 2018 |
|
RU2682144C1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС ДЛЯ ПРОТИВОДЕЙСТВИЯ МИКРО- И МИНИ-БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТАМ ПРОТИВНИКА | 2021 |
|
RU2802236C2 |
| Система автоматической намотки-размотки кабеля привязных БПЛА | 2023 |
|
RU2819974C1 |
Изобретение относится к области авиации, в частности к способу управления беспилотным летательным аппаратом (БПЛА) и беспилотным авиационным комплексам (БАК). БАК содержит наземную станцию, БПЛА с движителем, привязь, включающую силовой трос, связывающий наземную станцию с БПЛА, и многофункциональный кабель, а также механизм для регулирования длины привязи, и систему управления положением и стабилизации БПЛА, включающую датчики его пространственного положения. При управлении БПЛА обеспечивают режим его движителя, при котором подъемная сила превышает вес БПЛА вместе с привязью. Высоту подъема БПЛА задают длиной силового троса, а управление положением и стабилизацию БПЛА осуществляют с помощью отдельного управляющего троса, длину которого изменяют по сигналу датчиков, фиксирующих пространственное положение БПЛА. Механизм для регулирования длины управляющего троса может быть установлен на наземной станции комплекса или в носовой части летательного аппарата. В последнем случае управляющий трос может быть присоединен к силовому тросу. БПЛА связан с силовым тросом через шарнирный механизм. Использование предлагаемой конструкции БАК и предлагаемого способа управления БПЛА позволяют упростить структуру комплекса и его системы управления, отказаться от использования типовых вертолетных агрегатов в БПЛА, уменьшить вес БПЛА и БАК, увеличить долю полезной нагрузки. 2 н. и 4 з.п. ф-лы, 3 ил.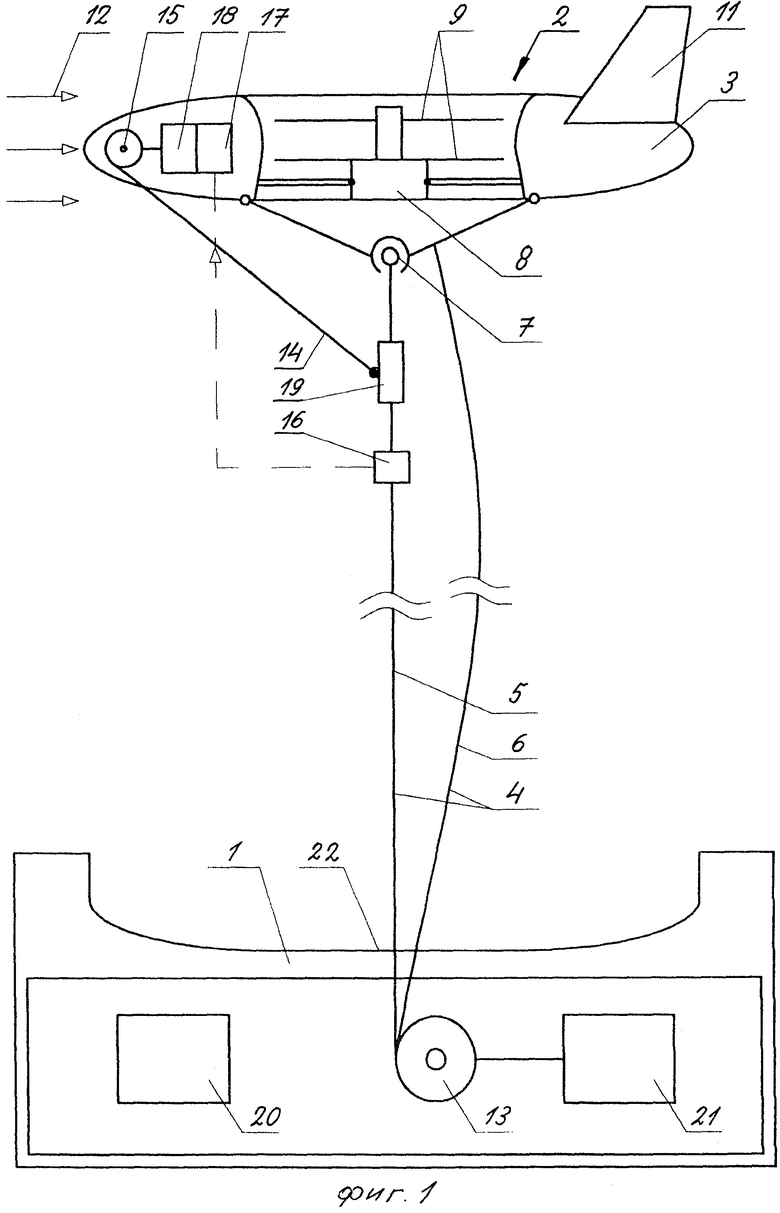
1. Способ управления беспилотным привязным летательным аппаратом, включающий его подъем на заданную высоту, управление положением и стабилизацию беспилотного летательного аппарата с использованием датчиков его пространственного положения, отличающийся тем, что обеспечивают режим беспилотного летательного аппарата, при котором его подъемная сила превышает вес летательного аппарата вместе с привязью для получения натяга силового троса привязи, при этом высоту подъема беспилотного летательного аппарата задают длиной силового троса привязи, а стабилизацию углового положения беспилотного летательного аппарата осуществляют с помощью отдельного управляющего троса, длину которого изменяют по сигналу датчиков пространственного положения беспилотного летательного аппарата.
2. Беспилотный авиационный комплекс, содержащий наземную станцию, беспилотный летательный аппарат с движителем и его приводом, привязь, включающую силовой трос, связывающий наземную станцию с беспилотным летательным аппаратом, и многофункциональный кабель, а также механизм для регулирования длины привязи, и систему управления положением и стабилизации беспилотного летательного аппарата, включающую датчики его пространственного положения, отличающийся тем, что система управления положением и стабилизации беспилотного летательного аппарата снабжена дополнительно хотя бы одним управляющим тросом и механизмом для регулирования длины управляющего троса, установленными с возможностью изменения углового положения беспилотного летательного аппарата при изменении длины управляющего троса, при этом привод механизма для регулирования длины управляющего троса связан с датчиками пространственного положения беспилотного летательного аппарата.
3. Беспилотный авиационный комплекс по п.2, отличающийся тем, что механизм для регулирования длины управляющего троса установлен на наземной станции, а управляющий трос присоединен к беспилотному летательному аппарату со смещением относительно его центра тяжести.
4. Беспилотный авиационный комплекс по п.2, отличающийся тем, что механизм для регулирования длины управляющего троса установлен в носовой части беспилотного летательного аппарата, при этом управляющий трос присоединен к силовому тросу через жесткий элемент и связан с беспилотным летательным аппаратом со смещением относительно его центра тяжести.
5. Беспилотный авиационный комплекс по п.2, отличающийся тем, что механизм для регулирования длины привязи беспилотного летательного аппарата снабжен тормозным устройством, обеспечивающим постоянный натяг силового троса при наматывании и сматывании привязи.
6. Беспилотный авиационный комплекс по п.2, отличающийся тем, что силовой трос связан с беспилотным летательным аппаратом через шарнирный механизм.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| RU 227806 C1, 20.06.2006 | |||
| Способ изготовления электродов для электрических печей | 1936 |
|
SU51966A1 |
| АЭРОСТАТНОЕ УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОБЗОРА МЕСТНОСТИ | 2000 |
|
RU2182544C2 |

