Предлагаемое изобретение относится к радиолокации, в частности к имитаторам радиолокационного сигнала сцены, на которой в широком диапазоне углов имеются подвижные по дальности и углу цели, и может быть использовано для исследования процессов обнаружения и сопровождения целей радиолокационной станцией (РЛС) в широком диапазоне дальностей и углов.
Известен имитатор цели [1], работающий в безэховой камере, в котором через приемную антенну принимается сигнал проверяемой РЛС, переносится на промежуточную частоту, задерживается по времени в соответствии с дальностью имитируемой цели, сдвигается по доплеровской частоте в соответствии с радиальной скоростью имитируемой цели, модулируется по амплитуде в соответствии с эффективной площадью рассеяния (ЭПР) цели и ее дальностью от проверяемой РЛС, переносится обратно на несущую частоту, излучается через передающую антенну в качестве имитируемого сигнала цели. Имитация углового движения цели может быть выполнена за счет управляемого механического перемещения антенны имитатора по сфере, центром которой является проверяемая РЛС.
Недостатком имитатора является достаточно большой поперечный размер безэховой камеры, который должен быть более 2Rбзsinβmах, где Rбз - дальность до границы между ближней и дальней зонами антенны РЛС, 2βmах - максимальный угловой разнос между имитируемыми целями, при этом число имитаторов эхо-сигнала для пространственно разнесенных по углу целей максимально и равно числу имитируемых целей сцены.
Известен имитатор цели [2], располагаемый в безэховой камере, содержащий большой эллиптический отражатель, установленный в дальней зоне антенны РЛС. Сама РЛС находится в одном из фокусов эллипсоида, в то время как во втором фокусе расположен излучающий элемент имитатора в виде многолучевой фазированной антенной решетки (ФАР). Множество СВЧ-сигналов модулируются по параметрам, соответствующим параметрам имитируемых целей, излучаются ФАР по независимым лучам и после переотражения от эллиптического отражателя принимаются антенной испытуемой РЛС. При этом каждый отраженный от эллиптического отражателя луч имитирует сигнал от отдельной цели или разрешаемого элемента сцены. Уровень сигналов, принимаемых антенной РЛС, определяется не только уровнем сигналов, сформированных имитатором в направлении лучей ФАР и отраженных от эллипсоида, но и рассогласованием переотраженного эллипсоидом луча имитатора относительно текущего направления оси визирования проверяемой РЛС.
Недостатком имитатора [2] является большой поперечный размер безэховой камеры, который в условиях имитации сигналов целей в широком угловом секторе сопоставим с поперечным размером безэховой камеры для имитатора [1].
Известно устройство имитации радиолокационного сигнала сцены матричного типа [3], которое устанавливается в дальней зоне проверяемой РЛС на торцевой стенке безэховой камеры, содержит множество антенн эхо-сигналов, которые облучаются РЛС подсвета и антенной проверяемой РЛС. Угловые положения антенн эхо-сигналов соответствуют угловым положениям элементов имитируемой сцены (целям). Каждая антенна эхо-сигналов соединена с соответствующим имитатором эхо-сигналов, формирующим сигнал одной из целей, задержанный в соответствии с дальностью цели, с длительностью, равной длительности зондирующего сигнала РЛС, сдвинутый по частоте на величину частоты доплера сигнала, отраженного целью, промодулированный по амплитуде в соответствии с дальностью цели, ее эффективной площадью рассеяния (ЭПР) и случайным законом амплитудной флюктуации. Эхо-сигнал имитатора через блок управляемых переключателей поступает на антенну, угловое положение которой соответствует имитируемой цели и излучаются. Управляемое соединение сигнала, сформированного имитатором эхо-сигнала, с излучающими антеннами эхо-сигнала через блок управляемых переключателей обеспечивает имитацию движения цели по углу.
Данное устройство обеспечивает имитацию нескольких целей и их движение в пространстве, но требуемые поперечные размеры безэховой камеры, так же как в устройствах [1] и [2], велики, при этом число антенн и имитаторов эхо-сигналов, имитирующих сигналы целей, отличающихся угловым положением, максимально и равно числу имитируемых целей сцены.
Целью прелагаемого изобретения является снижение требований к размерам безэховой камеры в поперечном направлении при одновременном снижении числа антенн и имитаторов эхо-сигналов.
Поставленная цель реализуется за счет увеличения пути, проходимого сигналом от антенны РЛС к антенне эхо-сигнала, с помощью последовательного отражения плоской волны сигнала РЛС в ближней зоне от двух плоских зеркал, расположенных между ними. Регулировкой угла наклона одного из отражающих зеркал относительно текущего положения оси антенны РЛС обеспечивается облучение антенн эхо-сигналов только на расчетных углах визирования антенны РЛС. При этом для множества разных по углу целей, находящихся в секторе сканирования антенны РЛС, может быть использован один или несколько общих для множества целей имитаторов эхо-сигнала.
Для решения поставленной цели в имитатор сцены [3], содержащий безэховую камеру, в одном торце которой размещается антенна проверяемой РЛС, а в противоположном - N пространственно разнесенных антенн эхо-сигналов, каждая из которых соединена с СВЧ-входом-выходом имитатора эхо-сигнала, номер которого одноименный номеру антенны эхо-сигнала, система управления, N+2 вход-выход которой через магистраль управления соединен с первыми входами-выходами N имитаторов эхо-сигналов, по которым вводятся управляющие данные о требуемой задержке, доплеровском сдвиге и амплитуде имитируемых сигналов, отличающийся тем, что между антенной РЛС и антеннами эхо-сигналов введены неподвижное и подвижное плоские зеркала, установленные в ближней зоне антенны РЛС, привод подвижного зеркала, при этом неподвижное зеркало переотражает плоскую волну сигнала, излучаемого антенной РЛС, в сторону подвижного зеркала, направление волны, переотраженной подвижным зеркалом, через привод подвижного зеркала регулируется углом наклона подвижного зеркала, датчик угла, механически соединенный с подвижным зеркалом, N приводов антенн эхо-сигнала, каждый из которых механически соединен с антенной эхо-сигнала и датчиком перемещения, номера которых одноименны номеру привода антенны эхо-сигнала, при этом привод каждой антенны смещает соответствующую антенну эхо-сигнала по дуге с центром, совпадающим с антенной РЛС, вход привода подвижного зеркала соединен с N+1 выходом системы управления, каждый из выходов системы управления с первого по N-й соединен с входом одноименного привода антенны эхо-сигнала, выход каждого датчика перемещения с первого по N-й соединен с одноименным входом системы управления, выход датчика угла соединен с N+1 входом системы управления, N+3 вход-выход которой является интерфейсным входом-выходом имитатора сцены, по которому вводятся исходные данные о положении, эффективной площади рассеяния и параметрах движения имитируемых целей по дальности и углу, текущие данные о угловом положении антенны РЛС.
Сущность изобретения поясняется дальнейшим описанием и чертежами имитатора сигнала сцены.
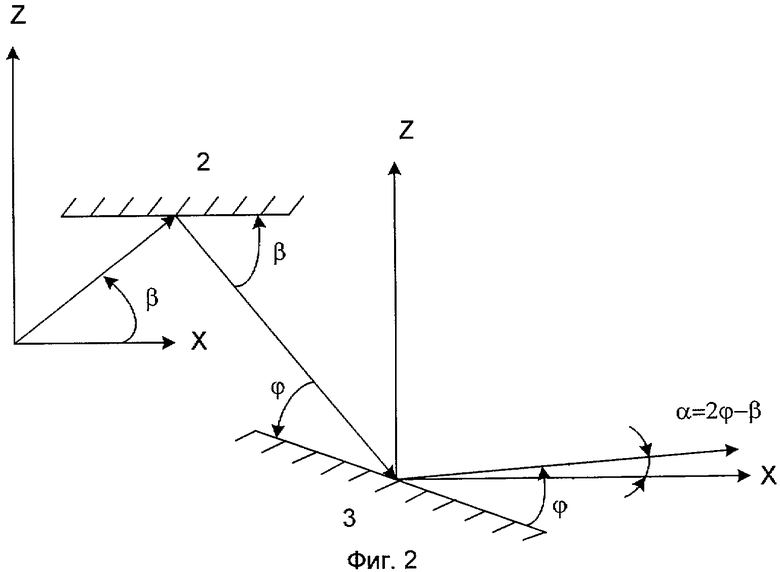
На фиг.1 изображена структура имитатора радиолокационного сигнала сцены.
На фиг.2 изображена геометрия, поясняющая расположение зеркал между проверяемой РЛС и имитатором.
На фиг.1 приняты следующие обозначения:
1 - антенна проверяемой РЛС (АРЛС);
2 - неподвижное зеркало;
3 - подвижное зеркало;
4 - датчик угла (ДУ);
5 - привод подвижного зеркала (ПРЗ);
6n - привод n-ной антенны эхо-сигнала (ПРАn);
7n - датчик положения n-ной антенны эхо-сигнала (ДПn);
8n - n-ная антенна эхо-сигнала (An);
9n - n-ный имитатор эхо-сигнала (ИЭСn);
10 - система управления (СУ);
11 - безэховая камера (БЭК).
На фиг.1 в безэховой камере 11 в одном торце размещается антенна проверяемой РЛС, а в противоположном - N пространственно разнесенных по углу антенн эхо-сигналов 81…8N, каждая n-я антенна 8n соединена с СВЧ-входом-выходом n-ного имитатора эхо-сигнала 9п, N+2 вход-выход системы управления 10 через магистраль управления соединен с первыми входами-выходами N имитаторов эхо-сигналов 91… 9N, между антенной РЛС 1 и антеннами эхо-сигналов 81… 8N в ближней зоне антенны РЛС 1 расположены неподвижное 2 и подвижное 3 плоские зеркала, неподвижное зеркало 2 переотражает плоскую волну сигнала, излучаемого антенной РЛС 1, в сторону подвижного зеркала 3, угол наклона которого регулируется приводом подвижного зеркала 5, датчик угла 4 механически соединен с подвижным зеркалом 5, выход каждого из N приводов антенн эхо-сигнала 6n механически соединен с антенной эхо-сигнала 8n и датчиком перемещения 7n, вход привода подвижного зеркала 5 соединен с N+1 выходом системы управления 10, каждый n-й выход системы управления 10 с первого по N-й соединен с входом одноименного привода антенны эхо-сигнала 8n, выход каждого n-ного датчика перемещения 7n с первого по N-й соединен с n-м входом системы управления 10, выход датчика угла 4 соединен с N+1 входом системы управления 10, N+3 вход-выход которой является интерфейсным входом-выходом имитатора радиолокационного сигнала сцены.
В качестве имитатора эхо-сигнала 9 может быть использован модуль 1879ВМ3 разработки ОАО «Модуль», г.Москва, либо построен по схеме [4, с.171, рис.6.21]. В качестве системы управления 10 может быть использована персональная ЭВМ типа Pentium, дополненная элементами сопряжения с управляемыми элементами.
Остальные элементы широко используются в радиолокации и не требуют пояснений по реализации.
Имитатор радиолокационного сигнала сцены, изображенный на фиг.1, работает следующим образом. Проверяемая РЛС через антенну 1 излучает сигналы в рабочем секторе углов β0±Δβ, при этом плоская волна антенны 1, излученная под углом β (фиг.2), отражается от плоского зеркала 2 в сторону подвижного зеркала 3, установленного под углом φ, в направлении α=2φ-β. При α=αn±Δϑ/2, где αn - угол направления на n-ную антенну эхо-сигнала 8n, Δϑ - ширина диаграммы направленности антенны РЛС, сигнал РЛС через антенну эхо-сигнала 8n поступает на имитатор эхо-сигнала 9n, где задерживается, сдвигается по доплеровской частоте и модулируется по амплитуде в соответствии с дальностью, радиальной скоростью, эффективной площадью рассеяния и случайным законом флюкруации n-ной цели, введенных на имитатор эхо-сигнала 9n с N+2 входа-выхода системы управления 10. Эхо-сигнал, сформированный имитатором эхо-сигнала 9n, через n-антенну эхо-сигнала 8n излучается обратно, переотражается подвижным 3 и неподвижными 2 зеркалами в сторону антенны РЛС 1 в качестве имитируемого сигнала n-й цели. Перестройкой угла наклона подвижного зеркала 3 на углы φn обеспечивается имитация множества сигналов сцены под углами βn=2φn-αn. Управление углом наклона φn подвижного зеркала и положением антенн эхо-сигналов αn производится системой управления 10 с учетом текущего направления антенны РЛС 1 β через соответствующие приводы 5 и 6n. Число антенн 8n и имитаторов эхо-сигнала 9n определяется наибольшим числом целей N, одновременно находящихся в пределах ширины диаграммы направленности антенны РЛС 1 при сканировании сцены. В процессе боевой работы система управления 10 вычисляет текущее положение каждой n-й цели на основании введенных в нее через N+3 вход-выход исходных координат и параметров движения по дальности и углу, формирует сигналы, управляющие приводами 5 и 6n, с учетом текущего значения угла β (направления антенны РЛС), приходящего с датчика углового положения антенны РЛС 1 (датчик угла и его связь с N+3 входом-выходом системы управления 10 не показана) на N+3 вход-выход, угла наклона φ подвижного зеркала 5, приходящего с датчика угла 4, и положений αn антенн эхо-сигнала 8n, приходящих с соответствующих датчиков положения 7n. При этом устраняются рассогласования положения целей βn относительно расчетных на углах β=βn±Δϑ/2.
Техническим преимуществом предлагаемого имитатора радиолокационного сигнала сцены перед прототипом является возможность имитации множества подвижных по дальности и углу целей в безэховой камере, имеющей продольный размер, равный дальности до границы между ближней и дальней зонами антенны РЛС, и поперечный размер, соответствующий удвоенной ширине диаграммы направленности антенны РЛС, при этом число антенн и имитаторов эхо-сигналов не более максимального числа одновременно облучаемых диаграммой направленности антенны РЛС целей во всем рабочем секторе сканирования.
Пользуясь сведениями, представленными в материалах описания, имитатор радиолокационной цели может быть изготовлен по существующей, известной в радиопромышленности технологии на базе известных комплектующих изделий и использован при проверках РЛС при стендовых испытаниях.
ЛИТЕРАТУРА
1. Патент США 5892479 от 06.04.99. "Electromagnetic target generator".
2. Патент США 4521780 от 04.06.85. "Target simulation system".
3. Патент США 4660041 от 21.4.87. "Radar scene simulator".
4. Ю.М.Перунов и др. Радиоэлектронное подавление информационных каналов систем управления оружием. М.: Радиотехника, 2003 г. (с.171, рис. 6.21).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР РАДИОЛОКАЦИОННОГО СИГНАЛА СЦЕНЫ | 2014 |
|
RU2549884C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОГО СИГНАЛА МОНОИМПУЛЬСНОЙ РЛС | 2008 |
|
RU2391682C1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489753C2 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2008 |
|
RU2412449C2 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| СПОСОБ МОДЕЛИРОВАНИЯ СИГНАЛА, ОТРАЖЕННОГО ОТ ЗЕМНОЙ ПОВЕРХНОСТИ, В РЕЖИМЕ КАРТОГРАФИРОВАНИЯ РЕАЛЬНЫМ ЛУЧОМ | 2013 |
|
RU2530544C1 |
| ИМИТАТОР СИГНАЛА РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2012 |
|
RU2522502C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЦЕЛЕЙ | 1997 |
|
RU2125275C1 |
| СИСТЕМА ВСТРОЕННОГО КОНТРОЛЯ И КАЛИБРОВКИ МОНОИМПУЛЬСНОЙ РЛС | 2011 |
|
RU2459219C1 |
Изобретение относится к радиолокации, в частности к имитаторам радиолокационного сигнала сцены, на которой в широком диапазоне углов имеются подвижные по дальности и углу цели, и может быть использовано для исследования процессов обнаружения и сопровождения целей радиолокационной станцией (РЛС) в широком диапазоне дальностей и углов. Достигаемым техническим результатом изобретения является снижение требований к размерам безэховой камеры в поперечном направлении при одновременном снижении числа антенн и имитаторов эхо-сигналов. Указанный результат достигается за счет последовательного отражения плоской волны сигнала, излученного антенной РЛС в ближней зоне, от неподвижного и подвижного зеркал, расположенных между антенной РЛС и антеннами эхо-сигналов. Регулировкой угла наклона подвижного зеркала обеспечивается облучение антенн эхо-сигналов только на расчетных углах визирования антенны РЛС. При этом число антенн и имитаторов эхо-сигналов не более максимального числа одновременно облучаемых диаграммой направленности антенны РЛС целей во всем рабочем секторе сканирования. 2 ил.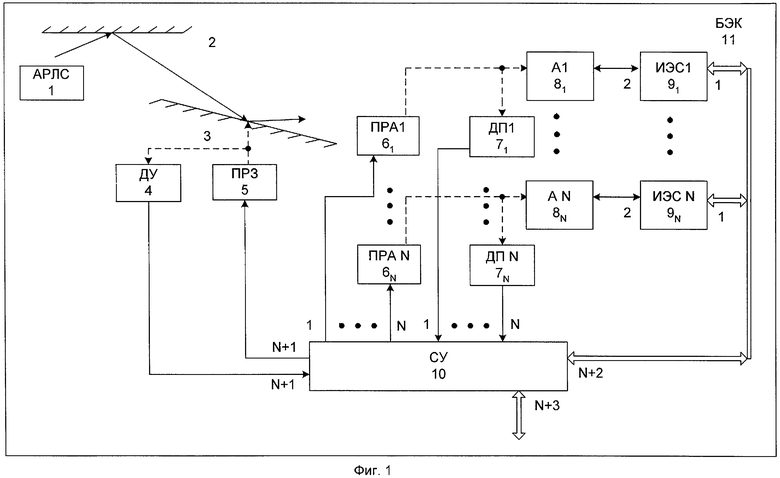
Устройство имитатора радиолокационного сигнала сцены, содержащее безэховую камеру, в одном торце которой размещается антенна проверяемой радиолокационной станции (РЛС), а в противоположном - N пространственно разнесенных антенн эхо-сигналов, каждая из которых соединена со сверхвысокочастотным (СВЧ) входом-выходом имитатора эхо-сигнала, номер которого одноименный номеру антенны эхо-сигнала, система управления, (N+2)-й вход-выход которой через магистраль управления соединен с первыми входами-выходами N имитаторов эхо-сигналов, по которым вводятся управляющие данные о требуемой задержке, доплеровском сдвиге и амплитуде имитируемых сигналов, отличающееся тем, что между антенной РЛС и антеннами эхо-сигналов введены неподвижное и подвижное плоские зеркала, установленные в ближней зоне антенны РЛС, привод подвижного зеркала, при этом неподвижное зеркало переотражает плоскую волну сигнала, излучаемого антенной РЛС, в сторону подвижного зеркала, направление волны, переотраженной подвижным зеркалом, через привод подвижного зеркала регулируется углом наклона подвижного зеркала, датчик угла, механически соединенный с подвижным зеркалом, N приводов антенн эхо-сигнала, каждый из которых механически соединен с антенной эхо-сигнала и датчиком перемещения, номера которых одноименны номеру привода антенны эхо-сигнала, при этом привод каждой антенны смещает соответствующую антенну эхо-сигнала по дуге с центром, совпадающим с антенной РЛС, вход привода подвижного зеркала соединен с N+1 выходом системы управления, каждый из выходов системы управления с первого по N-й соединен с входом одноименного привода антенны эхо-сигнала, выход каждого датчика перемещения с первого по N-й соединен с одноименным входом системы управления, выход датчика угла соединен с (N+1)-м входом системы управления, (N+3)-й вход-выход которой является интерфейсным входом-выходом имитатора сцены, по которому вводятся исходные данные о координатах, эффективной площади рассеяния и параметрах движения имитируемых целей по дальности и углу, текущие данные о угловом положении антенны РЛС.
| US 4660041 А, 21.04.1987 | |||
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2006 |
|
RU2317563C1 |
| СПОСОБ ИМИТАЦИИ ЦЕЛИ И ЕЕ ИМИТАТОР В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2234107C1 |
| СТАНЦИЯ РЕТРАНСЛЯЦИОННОГО ТИПА ОДНОКРАТНЫХ ИМИТИРУЮЩИХ ПОМЕХ ДОПЛЕРОВСКИМ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2001 |
|
RU2177160C1 |
| US 3732568 A, 08.05.1973 | |||
| EP 1960807 A1, 27.08.2008 | |||
| СМАЗОЧНОЕ МАСЛО ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1989 |
|
RU2012592C1 |
| US 2005195884 A1, 08.09.2005. | |||

