Область техники
Настоящее изобретение относится к ультразвуковому дефектоскопическому устройству и программе ультразвуковой дефектоскопии. В частности, настоящее изобретение относится к ультразвуковому дефектоскопическому устройству и программе ультразвуковой дефектоскопии, позволяющим осуществлять совокупность методов ультразвуковой дефектоскопии.
Уровень техники
Из уровня техники известно, что коррозионное растрескивание под напряжением происходит в сварных соединениях труб возвратной системы легководного атомного реактора. Кроме того, существующие тепловые электростанции подвержены возрастным ухудшениям; в действительности, в европейских странах и в США происходили аварии, когда трубы высокотемпературного пара стареющих тепловых электростанций разрушались вследствие растрескивания в зоне нагрева, вызванного появлением ползучих пустот и их соединением. Исходя из этих проблем, растет потребность в неразрушающем контроле сварного соединения толстой трубы, например сварного соединения трубопровода электростанции, в частности необходимость в определении размеров для нахождения производящего конца и завершающего конца дефекта и точного измерения высоты дефекта.
В качестве методов ультразвуковой дефектоскопии, позволяющих измерять высоту дефекта, можно указать, например, метод нормальной дефектоскопии, предусматривающий нормальную передачу ультразвуковой волны на дефектоскопическую поверхность нормальным зондом и прием ультразвуковой волны нормальным зондом оттуда, метод наклонной дефектоскопии, согласно которому ультразвуковая волна наклонно падает на дефектоскопическую поверхность и принимают эхо-сигнал края (Непатентный документ 1), метод TOFD (Time of Flight Diffraction), согласно которому обеспечивается падение продольной волны от одного из пары наклонных зондов, расположенных напротив друг друга, и дифрагированная волна, генерируемая на краю дефекта, принимается другим зондом (Непатентный документ 2), и, дополнительно, метод измерения, именуемый методом SPOD (Short Path of Diffraction), предложенный авторами изобретения (Непатентный документ 3). При этом согласно методу SPOD наклонный зонд объединяется с нормальным зондом, обеспечивается наклонное падение импульса ультразвуковой волны на дефектоскопическую поверхность, дифрагированная волна, генерируемая на краю дефекта, принимается нормальным зондом над дефектом, и высота дефекта определяется на основании разности между временами прибытия составляющей, которая непосредственно распространяется над дефектом, и составляющей, которая распространяется над дефектом после отражения на задней поверхности контролируемой детали.
Помимо вышеописанных методов ультразвуковой дефектоскопии, также предложены, например, метод использования вторичной ползущей волны, которая генерируется, когда ультразвуковая поперечная волна отражается на задней поверхности образца, и метод ультразвуковой дефектоскопии с использованием фазированного матричного зонда.
Непатентный документ 1: The Japanese Society for Non-Destructive Inspection, "Flaw Height Measuring Method by Tip Echo Techniques Standardized by The Japanese Society for Non-Destructive Inspection", опубликованный 1 июня 1997 г.
Непатентный документ 2: The Japanese Society for Non-Destructive Inspection, "Flaw Height Measuring Method by TOFD Method Standardized by The Japanese Society for Non-Destructive Inspection", опубликованный 1 декабря 2001 г.
Непатентный документ 3: FUKUTOMI Hiroyuki, LIN Shan, OGATA Takashi "Proposal of Simple Flaw Sizing Method in Ultrasonic Flaw Detection Test", Program & Abstracts of Second Academic Lecture, The Japan Society of Maintenology, 2005.
Сущность изобретения
Задачи изобретения
Однако, поскольку вышеописанные методы ультразвуковой дефектоскопии имеют преимущества и недостатки, соответственно, более пригодный метод ультразвуковой дефектоскопии нужно выбирать согласно условиям исследования. Например, нормальная дефектоскопия пригодна для контроля стальной пластины и т.п. Однако, поскольку ультразвуковая волна нормально падает на образец, возникает проблема в том, что трудно обнаружить позицию дефекта. Кроме того, наклонную дефектоскопию также можно применять к аустенитной нержавеющей стали, инконелю (зарегистрированный торговый знак Special Metals Corporation) и т.п. Однако возможны случаи, когда слабость краевого эхо-сигнала свидетельствует о коррозионном растрескивании под напряжением в сварном соединении деталей из нержавеющей стали. В этом случае контролеры должны обладать богатым опытом и хорошими навыками. Однако в действительности разные контролеры имеют разные опыт и навыки, что иногда не позволяет произвести точное измерение.
Хотя метод TOFD позволяет точно измерять высоту дефекта, этим методом трудно измерить позицию дефекта. Кроме того, метод TOFD также имеет недостаток в том, что, поскольку образец, высоту дефекта в котором можно точно измерить, ограничивается углеродистой сталью и т.п., метод TOFD нельзя применять к толстым структурам, состоящим из материала, имеющего большое кристаллическое зерно, например аустенитной нержавеющей стали, инконеля и т.п., поскольку методом TOFD трудно зарегистрировать дифрагированную волну.
Метод SPOD очень хорош по сравнению с традиционным методом ультразвуковой дефектоскопии, поскольку он обеспечивает более высокую чувствительность дефектоскопии, чем другие методы, поскольку он позволяет принимать слабую дифрагированную волну на более короткой траектории пучка и применим к толстым структурам из нержавеющей стали и т.п., к которым нельзя применять метод TOFD. Независимо от вышеозначенных преимуществ метод SPOD имеет тот недостаток, что имеет область, которую трудно обнаружить этим методом, и что методом SPOD труднее контролировать периферию участка усиления сварного соединения, чем методом наклонной дефектоскопии.
Вышеприведенное описание предусматривает осуществление дефектоскопического исследования совместно с другими методами измерений, когда присутствие или отсутствие дефекта и высота дефекта анализируются дефектоскопическим исследованием, благодаря чему более точную ультразвуковую дефектоскопию можно реализовать путем компенсации дефектов дефектоскопического исследования и других методов измерений.
Однако для переключения совокупности методов ультразвуковой дефектоскопии сложные задачи, например изменение позиции, где располагается зонд, изменение режима соединения дефектоскопа и зонда в ультразвуковом дефектоскопическом устройстве и т.п., необходимо решать каждый раз при переключении методов. Однако контролерам трудно осуществлять дефектоскопическое исследование на одном и том же образце с использованием совокупности методов дефектоскопии. Соответственно, непрактично осуществлять дефектоскопическое исследование на одном и том же образце с использованием совокупности методов ультразвуковой дефектоскопии, поскольку контроль требует времени, а также задача переключения трудна. Кроме того, для реализации совокупности традиционных методов дефектоскопии импульсный приемник должен быть снабжен совокупностью блоков приема и блоков передачи. Импульсный приемник, имеющий совокупность каналов, обычно дорог, что, соответственно, удорожает дефектоскопическое исследование.
Соответственно, задачей настоящего изобретения является обеспечение устройства ультразвукового дефектоскопического исследования и программы ультразвукового дефектоскопического исследования, которые позволяют выбирать оптимальный метод ультразвуковой дефектоскопии согласно условиям исследования путем простого переключения совокупности методов ультразвуковой дефектоскопии и дополнительно позволяют быстро и точно измерять высоту дефекта на основании совокупности результатов измерений с меньшим разбросом от контролера к контролеру.
Средства решения задачи
Для решения задачи ультразвуковое дефектоскопическое устройство по п.1 включает в себя наклонный зонд, нормальный зонд и схему коммутации, позволяющую по выбору переключать соединение наклонного зонда и нормального зонда с блоком передачи и блоком приема дефектоскопа. В ультразвуковом дефектоскопическом устройстве по п.1 схема коммутации может выбирать наклонный режим дефектоскопии для передачи и приема ультразвукового пучка только наклонным зондом, режим SPOD для передачи ультразвукового пучка наклонным зондом и приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, режим одновременного выполнения метода наклонной дефектоскопии и метода SPOD для передачи ультразвукового пучка наклонным зондом и приема отраженной волны наклонным зондом, а также приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом и нормальный режим дефектоскопии для передачи и приема ультразвукового пучка только нормальным зондом.
Ультразвуковое дефектоскопическое устройство по п.2 включает в себя первый наклонный зонд, второй наклонный зонд, расположенный напротив первого наклонного зонда, и схему коммутации, позволяющую по выбору переключать соединение соответствующих наклонных зондов с блоком передачи и блоком приема дефектоскопа. В ультразвуковом дефектоскопическом устройстве по п.2 схема коммутации может выбирать наклонный режим дефектоскопии для передачи и приема ультразвукового пучка только первым наклонным зондом, режим TOFD для передачи ультразвукового пучка первым наклонным зондом и приема поверхностной волны и дифрагированной волны вторым наклонным зондом, режим одновременного выполнения метода наклонной дефектоскопии и метода TOFD для передачи ультразвукового пучка первым наклонным зондом и приема отраженной волны первым наклонным зондом, а также приема поверхностной волны и дифрагированной волны вторым наклонным зондом и наклонный режим дефектоскопии для передачи и приема ультразвукового пучка только вторым наклонным зондом.
Ультразвуковое дефектоскопическое устройство по п.3 включает в себя первый наклонный зонд, нормальный зонд, второй наклонный зонд, расположенный напротив первого наклонного зонда через нормальный зонд, и схему коммутации, позволяющую по выбору переключать соединение соответствующих наклонных зондов с блоком передачи и блоком приема дефектоскопа. В ультразвуковом дефектоскопическом устройстве по п.3 схема коммутации может выбирать наклонный режим дефектоскопии для передачи и приема ультразвукового пучка только первым наклонным зондом, режим SPOD для передачи ультразвукового пучка первым наклонным зондом и приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, режим одновременного выполнения метода наклонной дефектоскопии и метода SPOD для передачи ультразвукового пучка первым наклонным зондом и приема отраженной волны первым нормальным зондом, а также приема дифрагированной волны нормальным зондом, нормальный режим дефектоскопии для передачи и приема ультразвукового пучка только нормальным зондом, режим TOFD для передачи ультразвукового пучка первым наклонным зондом и приема поверхностной волны и дифрагированной волны вторым наклонным зондом, режим одновременного выполнения метода наклонной дефектоскопии и метода TOFD для передачи ультразвукового пучка первым наклонным зондом и приема отраженной волны первым наклонным зондом, а также приема поверхностной волны и дифрагированной волны вторым наклонным зондом и наклонный режим дефектоскопии для передачи и приема ультразвукового пучка только вторым наклонным зондом.
Кроме того, предпочтительно, чтобы ультразвуковое дефектоскопическое устройство, отвечающее настоящему изобретению, имело средство оценки времени пика для оценивания времени появления пика эхо-сигнала на основании параметров образца, предварительно заданных согласно режиму дефектоскопии, выбранному схемой коммутации, и средство отображения руководства для отображения позиции появления пика эхо-сигнала, оцененной средством оценки времени пика на временную ось блока отображения для отображения регистрируемого эхо-сигнала посредством курсора.
Кроме того, предпочтительно, чтобы ультразвуковое дефектоскопическое устройство, отвечающее настоящему изобретению, имело средство отображения увеличенной формы волны для отображения области предварительно указанного диапазона на блок отображения в увеличенном виде, причем отображаемая позиция курсора располагается в центре области.
Кроме того, предпочтительно, чтобы средство отображения руководства ультразвукового дефектоскопического устройства, отвечающего настоящему изобретению, изменяло цвет линии формы волны блока отображения или цвет фона формы волны в соответствии с каждым режимом дефектоскопии.
Кроме того, предпочтительно, чтобы средство отображения руководства ультразвукового дефектоскопического устройства, отвечающего настоящему изобретению, предписывало блоку отображения одновременно отображать формы волны, формируемые совокупностью методов ультразвуковой дефектоскопии, когда ультразвуковое дефектоскопическое исследование выполняется над образцами совокупностью методов ультразвуковой дефектоскопии.
Программа ультразвуковой дефектоскопии по п.8 предписывает компьютеру, который управляет схемой коммутации для произвольного переключения соединения наклонного зонда и нормального зонда с блоком передачи и блоком приема импульсного приемника, выполнять процесс выбора цепи для управления переключением схемы коммутации согласно выбранному режиму дефектоскопии, посредством блока ввода, из наклонного режима дефектоскопии для передачи и приема ультразвукового пучка только наклонным зондом, режима SPOD для передачи ультразвукового пучка наклонным зондом и приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, режима одновременного выполнения метода наклонной дефектоскопии и метода SPOD для передачи ультразвукового пучка наклонным зондом и приема отраженной волны наклонным зондом, а также приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, и нормального режима дефектоскопии для передачи и приема ультразвукового пучка только нормальным зондом.
Программа ультразвуковой дефектоскопии по п.9 предписывает компьютеру, который управляет схемой коммутации для произвольного переключения соединения первого наклонного зонда и второго наклонного зонда, расположенного напротив первого наклонного зонда, с блоком передачи и блоком приема импульсного приемника, для выполнения процесса выбора цепи для управления переключением схемы коммутации согласно выбранному режиму дефектоскопии, посредством блока ввода, из наклонного режима дефектоскопии для передачи и приема ультразвукового пучка только первым наклонным зондом, режима TOFD для передачи ультразвукового пучка первым наклонным зондом и приема поверхностной волны и дифрагированной волны вторым наклонным зондом, режима одновременного выполнения метода наклонной дефектоскопии и метода TOFD для передачи ультразвукового пучка первым наклонным зондом и приема отраженной волны первым наклонным зондом, а также приема поверхностной волны и дифрагированной волны вторым наклонным зондом и наклонного режима дефектоскопии для передачи и приема ультразвукового пучка только вторым наклонным зондом.
Программа ультразвуковой дефектоскопии по п.10 предписывает компьютеру, который управляет схемой коммутации для произвольного переключения соединения первого наклонного зонда, нормального зонда и второго наклонного зонда, расположенного напротив первого наклонного зонда, с блоком передачи и блоком приема импульсного приемника, для выполнения процесса выбора цепи для управления переключением схемы коммутации согласно выбранному режиму дефектоскопии, посредством блока ввода, из наклонного режима дефектоскопии для передачи и приема ультразвукового пучка только наклонным зондом, режима SPOD для передачи ультразвукового пучка первым наклонным зондом и приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, режима одновременного выполнения метода наклонной дефектоскопии и метода SPOD для передачи ультразвукового пучка первым наклонным зондом и приема отраженной волны первым наклонным зондом, а также приема дифрагированной волны нормальным зондом, нормального режима дефектоскопии для передачи и приема ультразвукового пучка только нормальным зондом, режима TOFD для передачи ультразвукового пучка первым наклонным зондом и приема поверхностной волны и дифрагированной волны вторым наклонным зондом, режима одновременного выполнения метода наклонной дефектоскопии и метода TOFD для передачи ультразвукового пучка первым наклонным зондом и приема отраженной волны первым наклонным зондом, а также приема поверхностной волны и дифрагированной волны вторым наклонным зондом и наклонного режима дефектоскопии для передачи и приема ультразвукового пучка только вторым наклонным зондом.
В программе ультразвуковой дефектоскопии согласно настоящему изобретению в блоке памяти предварительно сохраняются параметры соответствующих выбранных режимов дефектоскопии, которые необходимы для оценивания времени появления пика эхо-сигнала, регистрируемого в выбранном режиме дефектоскопии, и компьютеру предписывается выполнять процесс оценки времени пика для предписания блоку арифметических операций вычислять время появления пика эхо-сигнала с использованием параметров из блока памяти в качестве входных значений и процесс отображения руководства для отображения курсора, который показывает позицию появления пика эхо-сигнала, оцененную в процессе оценки времени пика, на временную ось регистрируемого эхо-сигнала, отображаемого на блоке отображения.
Преимущество изобретения
Ультразвуковое дефектоскопическое устройство и программа ультразвуковой дефектоскопии, отвечающие настоящему изобретению, позволяют выбирать оптимальный метод ультразвуковой дефектоскопии из совокупности методов ультразвуковой дефектоскопии согласно условиям исследования только посредством операции переключения схемы коммутации. Кроме того, контролер может выполнять совокупность методов дефектоскопии последовательно или одновременно, по необходимости, только посредством простой операции переключения переключателей режима дефектоскопии, что позволяет сократить время исследования. Кроме того, поскольку совокупность ультразвуковых дефектоскопических исследований можно легко выполнять на одном и том же образце, можно компенсировать недостатки методов ультразвуковой дефектоскопии, а также добиваться синергетического эффекта. В результате можно более быстро осуществлять более точное дефектоскопическое исследование. Можно избирательно выполнять следующие шаблоны методов дефектоскопии. Например, согласно изобретению по п.1 можно избирательно выполнять четыре шаблона режимов дефектоскопии, использующие метод наклонной дефектоскопии, метод SPOD, комбинацию метода наклонной дефектоскопии и метода SPOD и метод нормальной дефектоскопии. Ультразвуковое дефектоскопическое устройство по п.2 позволяет избирательно выполнять четыре шаблона режимов дефектоскопии, использующие метод наклонной дефектоскопии с разных направлений, метод TOFD и комбинацию метода наклонной дефектоскопии и метода TOFD. Кроме того, ультразвуковое дефектоскопическое устройство по п.3 позволяет избирательно выполнять семь шаблонов режимов дефектоскопии, использующих метод наклонной дефектоскопии с разных направлений, метод SPOD, комбинацию метода SPOD и метода наклонной дефектоскопии, метод нормальной дефектоскопии, метод TOFD и комбинацию метода TOFD и метода наклонной дефектоскопии. Соответственно, можно выбирать метод дефектоскопии, наиболее пригодный в условиях исследований, и легко выполнять его в комбинации с совокупностью методов дефектоскопии. В результате, поскольку измерение можно выполнять с использованием преимуществ соответствующих методов, можно выполнять более точное ультразвуковое дефектоскопическое исследование.
Кроме того, достаточно, чтобы каждый дефектоскоп имел, по меньшей мере, один комплект блока передачи и блока приема и чтобы каждый комплект блока передачи и блока приема мог работать во всех режимах дефектоскопии. Соответственно, поскольку не требуется обеспечивать совокупность блоков приема, можно использовать импульсный приемник, имеющий минимальную производительность одного канала для приема. Таким образом, можно снизить стоимость импульсного приемника, а также стоимость дефектоскопического исследования.
Кроме того, согласно ультразвуковому дефектоскопическому устройству по п.4, поскольку необходимые параметры предварительно задаются согласно выбранному режиму дефектоскопии, время появления пика эхо-сигнала, которое используется как точка отсчета для анализа формы волны, можно вычислять согласно соответствующим методам ультразвуковой дефектоскопии, и курсор, показывающий время появления оценочного пика эхо-сигнала, можно отображать на временную ось блока отображения. Поскольку контролер может предварительно находить позицию, в которой появляется форма волны, подлежащая регистрации в каждом методе дефектоскопии, он может очень легко наблюдать форму волны, рассматривая ее в центральном участке отображаемого курсора.
Кроме того, согласно ультразвуковому дефектоскопическому устройству по п.7, поскольку заранее определенная область, включающая в себя участок курсора в своем центре, отображается в увеличенном виде, контролер может легко удостовериться, присутствует ли дефект и эхо-сигнал от цели, наблюдая форму волны на участке, отображаемом в увеличенном виде.
Кроме того, согласно ультразвуковому дефектоскопическому устройству по п.8, поскольку контролер может распознать, каким методом дефектоскопии получена форма волны, на основании цвета фона, контролер с меньшей вероятностью ошибется в выборе выполняемого метода дефектоскопии.
Кроме того, согласно ультразвуковому дефектоскопическому устройству по п.9, поскольку контролер может одновременно наблюдать формы волны, полученные совокупностью методов ультразвуковой дефектоскопии на одном экране, более точную ультразвуковую дефектоскопию можно реализовать, дополняя информацию, которую нельзя получить путем выполнения только одного метода дефектоскопии, информацией, полученной другим методом дефектоскопии.
Краткое описание чертежей
Фиг.1 - блок-схема, демонстрирующая пример ультразвукового дефектоскопического устройства согласно первому варианту осуществления.
Фиг.2 - блок-схема, демонстрирующая пример компьютера согласно первому варианту осуществления.
Фиг.3 - вид сверху держателя зонда.
Фиг.4 - вид сбоку в вертикальной проекции держателя зонда.
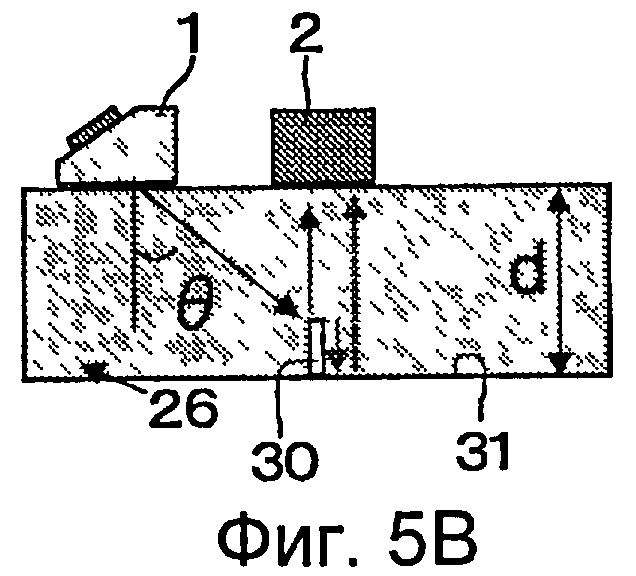
Фиг.5A-5C - схемы, демонстрирующие пиковые времена эхо-сигналов. На Фиг.5A показано время пика эхо-сигнала, измеренное методом наклонной дефектоскопии. На Фиг.5B показано время пика эхо-сигнала, измеренное методом SPOD. На Фиг.5C показано время пика эхо-сигнала, измеренное методом нормальной дефектоскопии.
Фиг.6 - блок-схема последовательности операций, демонстрирующая пример процесса, выполняемого согласно программе ультразвуковой дефектоскопии, отвечающей настоящему изобретению.
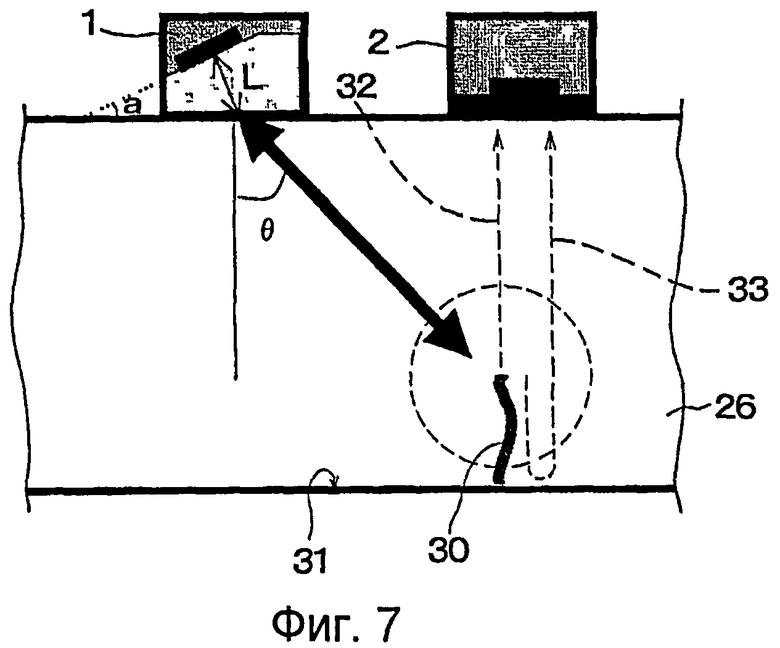
Фиг.7 - вид, демонстрирующий пример времени задержки в наклонном клине и угла преломления ультразвукового пучка.
Фиг.8 - блок-схема последовательности операций, демонстрирующая пример процесса отображения руководства.
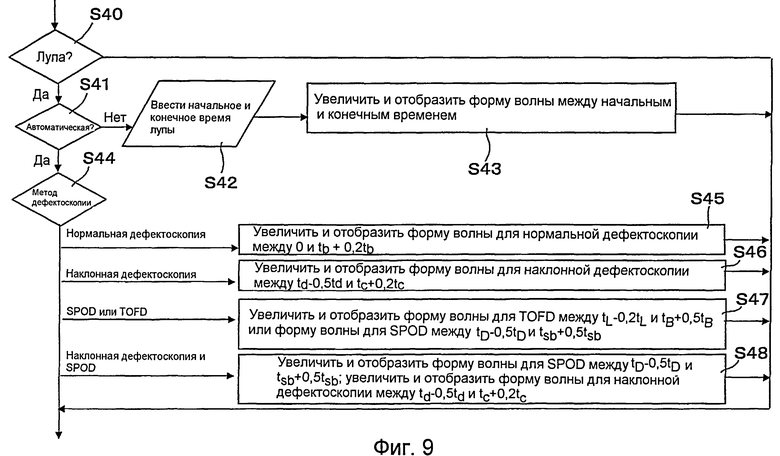
Фиг.9 - блок-схема последовательности операций, демонстрирующая пример процесса отображения увеличения формы волны.
Фиг.10A-10D - изображения, демонстрирующие примеры курсоров, отображаемых в процессе отображения руководства. На Фиг.10A показана форма волны, измеренная методом наклонной дефектоскопии. На Фиг.10B показана форма волны, измеренная методом SPOD. На Фиг.10C показана форма волны, измеренная методом наклонной дефектоскопии и методом SPOD. На Фиг.10D показана форма волны, измеренная методом нормальной дефектоскопии.
Фиг.11 - блок-схема, демонстрирующая пример ультразвукового дефектоскопического устройства согласно второму варианту осуществления.
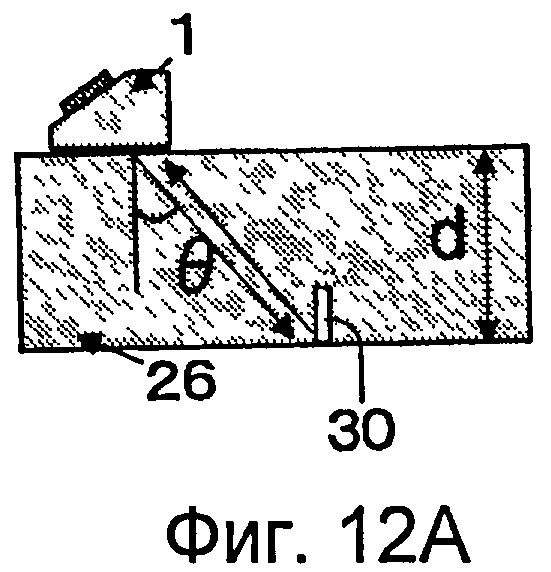
Фиг.12A и 12B - схемы, демонстрирующие пиковые времена эхо-сигналов. На Фиг.12A показано время пика эхо-сигнала, измеренное методом наклонной дефектоскопии. На Фиг.12B показано время пика эхо-сигнала, измеренное методом TOFD.
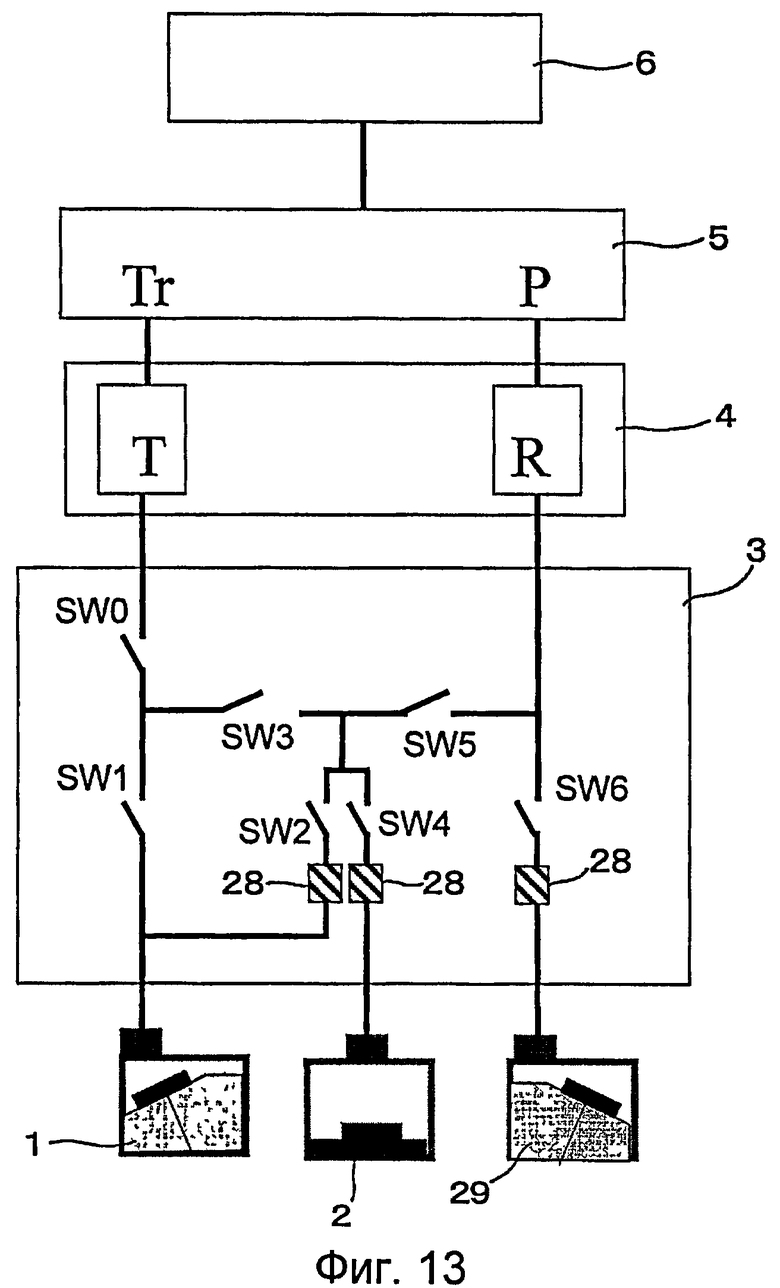
Фиг.13 - блок-схема, демонстрирующая пример ультразвукового дефектоскопического устройства согласно третьему варианту осуществления.
Перечень условных обозначений
1 Наклонный зонд (первый наклонный зонд)
2 Нормальный зонд
29 Наклонный зонд (второй наклонный зонд)
3 Схема коммутации
4 Импульсный приемник
5 А/Ц преобразователь
6 Персональный компьютер
7 Устройство отображения
14 Средство выбора цепи
15 Средство оценки времени пика
16 Средство отображения руководства
17 Средство отображения увеличенной формы волны
26 Образец
27 Курсор
Предпочтительные варианты осуществления изобретения
Настоящее изобретение будет подробно описано ниже в предпочтительных вариантах осуществления, показанных на чертежах.
На Фиг.1-10 показан первый вариант осуществления настоящего изобретения. В ультразвуковом дефектоскопическом устройстве согласно первому варианту осуществления используется персональный компьютер 6, который собирает данные и действия в качестве контроллера и запрограммирован так, чтобы управлять наклонным зондом 1 и нормальным зондом 2 через импульсный приемник 4 и схему 3 коммутации, подключенную через А/Ц преобразователь 5. Наклонный зонд 1 и нормальный зонд 2 подключены к блоку Т передачи и блоку R приема импульсного приемника 4 через схему 3 коммутации, что позволяет их переключать по выбору. При этом наклонный зонд 1 и нормальный зонд 2 могут передавать и принимать ультразвуковой пучок соответственно и действовать как передающий зонд или приемный зонд в зависимости от режима, выбранного схемой 3 коммутации.
Согласно Фиг.2 персональный компьютер 6 имеет блок 7 отображения, блок 8 ввода, например клавиатуру, мышь и т.п., блок (ЦП) 9 арифметических операций, оперативную память (ОЗУ) 10 и внешнюю память 11, например жесткий диск и т.п. для осуществления функции, соответствующей дефектоскопу. Заметим, что оперативная память 10 и внешняя память 11 в целом называются просто памятью. Кроме того, компьютер 6 реализует средство 14 выбора цепи, средство 15 оценки времени пика, средство 16 отображения руководства и средство 17 отображения увеличенной формы волны на компьютере путем выполнения программы, хранящейся во внешней памяти 11. В компьютере 6 средство 14 выбора цепи выполняет процесс выбора цепи для управления переключением переключателей SW0-SW4, выдавая сигнал для изменения соединительной конфигурации переключателей на схему 3 коммутации, которая выбирает передающий зонд и приемный зонд согласно выбранному режиму дефектоскопии с блока 8 ввода; средство 15 оценки времени пика выполняет процесс оценки времени пика для предварительного сохранения параметров, необходимых для вычисления времени появления эхо-сигнала, подлежащего регистрации в режиме дефектоскопии, выбранном в средстве 14 выбора цепи, и предписания блоку 9 арифметических операций вычислить время появления пика эхо-сигнала с использованием сохраненных параметров в качестве входных значений; средство 16 отображения руководства выполняет процесс отображения руководства для предписания временной оси регистрируемого эхо-сигнала, отображаемой на блоке 7 отображения, отображать курсор 27, показывающий позицию появления пика эхо-сигнала, оцененную средством 15 оценки времени пика; и средство 17 отображения увеличенной формы волны выполняет процесс отображения увеличенной формы волны для отображения области предварительно указанного диапазона в увеличенном виде, при этом позиция отображения курсора 27 отображается средством 16 отображения руководства в центре области. Вышеперечисленные аппаратные ресурсы электрически связаны, например, через шину 12 и подключены к А/Ц преобразователю 5 через интерфейс (I/F) 13 ввода/вывода.
Согласно варианту осуществления, хотя функция, соответствующая дефектоскопу, обеспечивается компьютером 6, А/Ц преобразователем 5 и импульсным приемником 4, компьютер 6 можно использовать только для сбора данных с использованием независимого дефектоскопа. Импульсный приемник 4 управляет передающим зондом и приемным зондом на основании команды от ЦП 9 компьютера 6 или под непосредственным управлением импульсного приемника 4. В блоке 7 отображения время, необходимое для возвращения отраженной импульсной волны, показано на горизонтальной оси, и интенсивность ультразвуковой волны, т.е. высота эхо-сигнала, которая отражается и возвращается, показана на вертикальной оси; далее она называется просто формой волны.
Согласно варианту осуществления, показанному на Фиг.3 и 4, наклонный зонд 1 и нормальный зонд 2 соединены друг с другом пластинчатой соединительной деталью 18 и способны перемещаться на одно и то же расстояние в одном и том же направлении одновременно, сохраняя заранее определенный зазор между собой. При выполнении метода SPOD эхо-сигнал, который непосредственно распространяется над дефектом дифрагированной волны, и эхо-сигнал, который распространяется над дефектом после однократного отражения на задней поверхности, появляются одновременно с одной и той же разностью времен прибытия без нарушения независимо от интенсивности сигнала. В результате позицию высоты дефекта или саму высоту дефекта можно просто найти, соединив зонд 1 для передачи с зондом 2 для приема соединительной деталью 18 и перемещая их, сохраняя заранее определенный интервал между ними. При этом промежуток между наклонным зондом 1 и нормальным зондом 2 предпочтительно регулировать путем размещения соединительной детали 18 таким образом, чтобы позиция ее присоединения к, по меньшей мере, одному из зондов могла изменяться. С этой целью соединительная деталь 18 имеет прорезь 22, сформированную в продольном направлении, и может регулировать промежуток между наклонным зондом 1 и нормальным зондом 2 путем фиксации с возможностью линейного перемещения любого из зондов 1, 2, соединенных друг с другом, с использованием прорези 22. Таким образом, один из зондов, например наклонный зонд 1, крепится к одному концу соединительной детали 18 зажимным винтом 19 таким образом, чтобы его угол можно было регулировать, тогда как другой зонд, например нормальный зонд 2, присоединяется к соединительной детали 18 посредством зажимного винта 20, проходящего через прорезь 22, и стопора 21, что позволяет регулировать угол нормального зонда 2. Наклонный зонд 1 удерживается соединительной деталью 18 путем фиксации зажимного винта 19 на кондукторе 23, который зажимает обе стороны наклонного зонда 1, посредством сварки, клея и т.п. Аналогично, нормальный зонд 2 также удерживается соединительной деталью 18 путем фиксации зажимного винта 20 на кондукторе 24, который зажимает обе стороны нормального зонда 2 посредством сварки, клея и т.п. Кроме того, нормальный зонд 2 располагается относительно соединительной детали 18 путем фиксации зажимного винта 20 на стопоре 21 и фиксации стопора 21 на соединительной детали 18. Винт 25 располагается на стопоре 21, и стопор 21 объединяется с соединительной деталью 18 за счет трения, обусловленного затяжкой винта 25, что позволяет фиксировать позицию нормального зонда 2. Соответственно, позиция, в которой зафиксирован нормальный зонд 2, перемещается в диапазоне прорези 22 путем ослабления зажимного винта 20, что позволяет регулировать промежуток между наклонным зондом 1 и нормальным зондом 2.
Кроме того, хотя в качестве ультразвукового пучка предпочтительно использовать продольную волну, ультразвуковой пучок не ограничивается продольной волной, и также можно использовать поперечную волну. Причина, почему используется продольная волна, заключается в том, что она с меньшей вероятностью подвергается влиянию металлической структуры в силу своей большой длины волны, а также из-за того, что она быстрее достигает зонда, чем поперечная волна. Однако, поскольку поперечную волну также можно принимать, продольная волна может дополняться поперечной волной, когда продольную волну невозможно принимать по той или иной причине.
Передающий зонд и приемный зонд также могут измерять дефект, независимо выполняя сканирование. Например, дефект также можно обнаруживать, перемещая передающий зонд, в то же время фиксируя приемный зонд над дефектом, или, наоборот, перемещая приемный зонд, в то же время фиксируя передающий зонд над дефектом.
Схема 3 коммутации может управлять совокупностью переключателей на основании команды от ЦП 9 компьютера 6 или под непосредственным управлением импульсного приемника 4, благодаря чему переключатели электрически включаются и выключаются.
В частности, схема 3 коммутации согласно варианту осуществления устроена так, что соединение любого или обоих из наклонного зонда 1 и нормального зонда 2 с блоком передачи и блоком приема импульсного приемника 4, которое образует дефектоскоп, по выбору переключается путем комбинирования пяти переключателей SW0-SW4, которые могут электрически включаться и выключаться, что позволяет избирательно осуществлять четыре режима дефектоскопии, описанных ниже. Таким образом, переключатели SW0 и SW1 вставлены между блоком Т передачи импульсного приемника 4 и наклонным зондом 1 последовательно, переключатель SW4 вставлен между блоком R приема и нормальным зондом 2 последовательно, а также переключатель SW2, который соединяет блок R приема и наклонный зонд 1, располагается рядом с переключателем SW4, и дополнительно переключатель SW3 способен соединять переднюю сторону переключателя SW1 и передние стороны переключателей SW4 и SW2. Здесь переключатель SW0 является главным переключателем источника питания, который включается, когда дефектоскопическое исследование начинается, и выключается, после того как исследование заканчивается. Кроме того, позиция 28 обозначает регулируемый усилитель, который при необходимости может усиливать слабую дифрагированную волну.
(1) Первый режим
Когда переключатели SW1 и SW2 включаются и переключатели SW3 и SW4 выключаются, только наклонный зонд 1 подключается к блоку Т передачи и блоку R приема импульсного приемника 4 и только наклонный зонд 1 передает и принимает ультразвуковой пучок, благодаря чему выполняется так называемый наклонный режим дефектоскопии для приема краевого эхо-сигнала от дефекта 30, как показано на Фиг.5A.
(2) Второй режим
Когда переключатели SW1 и SW4 включаются и переключатели SW2 и SW3 выключаются, наклонный зонд 1 подключается к блоку T передачи импульсного приемника 4 и нормальный зонд 2 подключается к блоку R приема импульсного приемника 4 соответственно. При этом, как показано на Фиг.5B, выполняется так называемый режим SPOD, в котором нормальный зонд 2 принимает дифрагированную волну 32, которая генерируется на конце дефекта 30 ультразвуковой волной, падающей от наклонного зонда 1, и непосредственно распространяется над дефектом 30, и дифрагированную волну 33, которая распространяется над дефектом 30 после однократного отражения на задней поверхности 31.
(3) Третий режим
Когда переключатели SW1, SW2 и SW4 включаются и переключатель SW3 выключается, наклонный зонд 1 подключается к блоку T передачи и к блоку R приема и одновременно нормальный зонд 2 подключается к блоку R приема соответственно. В результате одновременно выполняются так называемый метод наклонной дефектоскопии и метод SPOD, в котором наклонный зонд 1 порождает падающую ультразвуковую волну и принимает концевой эхо-сигнал, и одновременно нормальный зонд 2 принимает дифрагированную волну 32, которая генерируется на конце дефекта 30 и непосредственно распространяется над дефектом 30, и дифрагированную волну 33, которая распространяется над дефектом после однократного отражения на задней поверхности 31.
(4) Четвертый режим
Когда переключатели SW3 и SW4 включаются и переключатели SW1 и SW2 выключаются, выполняется так называемый нормальный режим дефектоскопии, в котором только нормальный зонд 2 подключается к блоку T передачи и блоку R приема импульсного приемника 4 и только нормальный зонд 2 порождает падающую ультразвуковую волну и принимает краевой эхо-сигнал, как показано на Фиг.5C.
Кроме того, когда форма волны отображается на блоке 7 отображения, она может отображаться, как в обычном дефектоскопе. Однако предпочтительно, чтобы блок 7 отображения имел функцию отображения формы волны для оценки времени появления пика регистрируемого эхо-сигнала, которое отличается для разных режимов дефектоскопии и предварительного отображения позиции, в которой появляется пик регистрируемого эхо-сигнала, на временной оси блока отображения посредством курсора. В блоке 7 отображения горизонтальная ось показывает время, необходимое для возвращения отраженной импульсной волны, и вертикальная ось показывает интенсивность, т.е. высоту эхо-сигнала, ультразвуковой волны, которая отражается и возвращается. Согласно варианту осуществления временная ось формы волны, т.е. горизонтальная ось синхронизируется с переключением схемы коммутации задающим сигналом импульсного приемника 4 для возбуждения зонда.
Когда параметр для прогнозирования траектории пучка предварительно определяется или предполагается в материале, в котором предположительно ультразвуковая волна имеет, по существу, фиксированную скорость, время распространения, т.е. время прихода эхо-сигнала, можно определить путем вычисления. Таким образом, для вычисления и оценивания времени, когда эхо-сигнал, подлежащий регистрации, т.е. позиция, в которой высота эхо-сигнала максимальна, появляется в каждом дефектоскопическом исследовании, параметры, необходимые для оценки времени приема отраженной волны, например толщину образца, скорость распространения ультразвуковой волны в образце, время задержки в наклонном клине, угол падения ультразвуковой волны, оценочную высоту дефекта и т.п., нужно выбирать и предварительно задавать для каждого метода дефектоскопического исследования.
Выбор вышеописанных режимов дефектоскопии и оценивание и отображение позиции появления пика эхо-сигнала, регистрируемого в каждом режиме дефектоскопии, можно реализовать путем выполнения программы ультразвуковой дефектоскопии на компьютере, которая будет описанный ниже. На Фиг.6 показана последовательность операций процесса, выполняемого программой ультразвуковой дефектоскопии согласно варианту осуществления. В ультразвуковом дефектоскопическом устройстве согласно варианту осуществления сначала выбирается (S1) метод ультразвуковой дефектоскопии, подлежащий выполнению, а затем параметры, необходимые для выбранного режима дефектоскопии, вводятся или выбираются из базы данных (S2). Время появления эхо-сигнала в выбранном методе ультразвуковой дефектоскопии вычисляется и отображается на блоке 7 отображения посредством курсора 27 (S3). Затем изображение отображается в увеличенном виде, причем курсор 27 показывает оценочную позицию появления эхо-сигнала в центре изображения (S4), и последовательность операций заканчивается окончательным определением конца работы (S5).
Сначала выбирается (S1) метод ультразвуковой дефектоскопии, подлежащий выполнению в начале процесса. Согласно варианту осуществления, например, кнопки выбора отображаются на блоке 7 отображения и выбор метода производится путем выбора кнопок выбора посредством блока 8 ввода, например мыши и т.п. Хотя на кнопках выбора отображаются метки, например "нормальная дефектоскопия", "наклонная дефектоскопия", "метод SPOD" и "наклонная дефектоскопия и метод SPOD", метки этим не ограничиваются. Когда какой-либо из методов ультразвуковой дефектоскопии выбран, средство 14 выбора цепи выполняет управление переключением схемы 3 коммутации согласно выбранному методу ультразвуковой дефектоскопии. Управление переключением схемы коммутации можно осуществлять с использованием известной технологии, и способ его осуществления ничем конкретно не ограничивается. Кроме того, соответствующие переключатели можно включать и выключать вручную по своему усмотрению. Информация, указывающая, какой метод дефектоскопии выбран, сохраняется, например, в оперативной памяти 10 в качестве параметра и используется до окончания процесса.
Затем задаются параметры (S2). Вариант осуществления предусматривает (1) толщину образца, (2) скорость распространения ультразвуковой волны в образце, (3) время задержки в наклонном клине, (4) угол падения ультразвукового пучка и (5) оценочную высоту дефекта в качестве параметров согласно четырем режимам дефектоскопии. Здесь не требуется вводить все параметры во всех методах дефектоскопии и достаточно надлежащим образом ввести необходимые параметры согласно выбранному методу дефектоскопии. Эти параметры, например, сохраняются в оперативной памяти 10 путем отображения экрана ввода параметров на блоке 7 отображения и их ввода контролером.
Пример определения параметров описан ниже.
(1) Толщину d образца можно измерить толщиномером.
(2) Скорость c ультразвуковой волны в образце уникальным образом определяется материалом образца 26.
(3) Время задержки td в наклонном клине - это параметр, который необходим для метода наклонной дефектоскопии и метода SPOD и который можно определить согласно Выражению 1, например, в случае, показанном на Фиг.7.
<Выражение 1>
Td=L/C1
Здесь L обозначает расстояние распространения ультразвуковой волны в клине и C1 обозначает скорость продольной волны в клине.
(4) Угол падения θ - это параметр, который необходим для метода наклонной дефектоскопии и метода SPOD. Например, угол падения θ можно определить из угла наклона, обозначенного символом "a" на Фиг.7, и материала наклонного клина.
(5) Оценочная высота дефекта "h" - это параметр, который необходим для метода SPOD и который предварительно оценивается. Например, поскольку высота дефекта первоначально составляет от 2 до 3 мм, значения можно вводить. Кроме того, высоту дефекта можно задать равной заранее определенному проценту (например, от 10 до 20%) от толщины образца 26. Кроме того, когда высота дефекта уже измерена другим методом дефектоскопии, можно ввести измеренное значение. В результате, можно осуществить более точное ультразвуковое дефектоскопическое исследование методом SPOD на основании значений, измеренных методом нормальной дефектоскопии и методом наклонной дефектоскопии.
Заметим, что поскольку эти параметры приведены только в качестве примера, параметры этим не ограничиваются. Кроме того, примеры параметров, которые задаются, например, для каждого материала и конечного продукта, можно предварительно конфигурировать в виде базы данных и хранить во внешней памяти 11 и т.п., чтобы не приходилось задавать параметры каждый раз.
Затем выполняется процесс отображения руководства. В ультразвуковом дефектоскопическом исследовании эхо-сигнал, подлежащий регистрации, т.е. позиция, в которой высота эхо-сигнала максимальна, существует в каждом методе дефектоскопии, подлежащем выполнению, и контролер измеряет высоту дефекта и т.п. на основании времени появления эхо-сигнала. В ультразвуковом дефектоскопическом устройстве, отвечающем настоящему изобретению, время появления эхо-сигнала, подлежащего регистрации, оценивается в каждом методе дефектоскопии, и курсор 27, который указывает время появления, отображается на временной оси формы волны для поддержки операции анализа формы волны, осуществляемой контролером.
На Фиг.8 показана подробная блок-схема последовательности операций процесса отображения руководства согласно варианту осуществления. Сначала производится определение, какой из методов дефектоскопии выбран (S30). Затем времена, т.е. моменты достижения пика, в которые эхо-сигналы соответствующих форм волны максимальны, вычисляются из входных параметров (S31, S33, S35 и S37). Здесь под моментами достижения пика эхо-сигналов соответствующих форм волны подразумевается донный эхо-сигнал в нормальной дефектоскопии, угловой эхо-сигнал дефекта в отверстии дна в наклонной дефектоскопии и краевой эхо-сигнал и эхо-сигнал, отраженный на его дне в методе SPOD.
Время появления tb донного эхо-сигнала в методе нормальной дефектоскопии определяется из выражения 2 (см. Фиг.5C).
<Выражение 2>
tb=2d/c
Время появления tc углового эхо-сигнала дефекта в отверстии дна в методе наклонной дефектоскопии определяется из выражения 3 (см. Фиг.5A).
<Выражение 3>
tc=2d/(c cosθ)+2td
Время появления tD эхо-сигнала дифрагированной волны, которая распространяется непосредственно от конца дефекта к дефектоскопической поверхности в методе SPOD, определяется из выражения 4. Кроме того, время появления tsb донного эхо-сигнала дифрагированной волны, которая распространяется к дефектоскопической поверхности после однократного отражения на дне, определяется из выражения 5 (см. Фиг.5B).
[Выражение 4]

[Выражение 5]
tsb=(d-h)/(c cosθ)+(d+h)/cL+td=tD+2h/cL,
где cL - скорость продольной волны.
После вычисления времени появления эхо-сигнала в выбранном методе дефектоскопии в вышеописанном процессе осуществляется (S32, S34, S36, S38) процесс для отображения курсора 27, например знака "▲" в позицию координаты, соответствует которой форма волны, отображающаяся вдоль временной оси блока 7 отображения. На Фиг.10A-10D показаны примеры, в которых позиции, в которых появление пиков регистрируемых эхо-сигналов обусловлено процессом отображения руководства, в соответствующих режимах дефектоскопии: на Фиг.10A показано время появления углового эхо-сигнала дефекта в отверстии дна в методе наклонной дефектоскопии; на Фиг.10B показано время появления краевого эхо-сигнала в методе SPOD; на Фиг.10C показано время появления углового эхо-сигнала и краевого эхо-сигнала дефекта в отверстии дна в методе наклонной дефектоскопии и методе SPOD, и на Фиг.10D показано время появления донного эхо-сигнала в методе нормальной дефектоскопии соответственно.
Экран, отображаемый на блоке 7 отображения, можно разделить на четыре участка, чтобы формы волны эхо-сигналов в ультразвуковой дефектоскопии, осуществляемой в режимах с первого по четвертый, могли отображаться на одном экране. В частности, совокупность форм волны может отображаться на экране одновременно путем сохранения форм волны при приеме эхо-сигналов соответствующими методами дефектоскопии и непрерывном их отображении как есть. Соответственно, контролер может измерять размер, высоту и т.п. дефекта, одновременно наблюдая результаты, полученные четырьмя методами дефектоскопии на максимуме. При этом экран не нужно делить на четыре участка и можно делить на два или три участка, и можно выбирать методы дефектоскопии, подлежащие отображению.
Кроме того, предпочтительно изменять соответствующие формы волны, подлежащие отображению, и их цвета фона в соответствующих методах дефектоскопии. Например, можно использовать один и тот же цвет фона и формы волны можно отображать линиями разного цвета. Кроме того, согласно варианту осуществления метод дефектоскопии отображается как титул формы волны, чтобы контролер не перепутал данные.
Теперь перейдем к описанию процесса отображения увеличенной формы волны (S4). На Фиг.9 показана подробная блок-схема последовательности операций процесса отображения увеличенной формы волны. Согласно варианту осуществления временные области до и после курсора 27, который отображается в процессе отображения руководства и действует как начало отсчета, отображаются в увеличенном виде; далее это также называется экранной лупой.
При выборе экранной лупы (S40: Да) производится выбор, отображается ли она автоматически или вручную (S41). Здесь увеличенное отображение экрана дисплея, т.е. лупа, означает отображение формы волны в увеличенном виде, причем курсор 27, который отображается в процессе отображения руководства, располагается в центре формы волны, что можно осуществлять известными методами обработки изображений. Например, периферийные пиксели (100×100 пикселей) вокруг курсора 27 отображаются в увеличенном виде (400×400 пикселей), отображение этим не ограничивается. Увеличенный экран может отображаться в том же окне или в другом окне. Кроме того, согласно варианту осуществления предусмотрено два шаблона, т.е. шаблон, в котором контролер вручную осуществляет процесс отображения увеличенной формы волны, оперируя блоком ввода, например мышью, и шаблон, в котором процесс отображения увеличенной формы волны выполняется автоматически, из-за чего может быть выбран любой из шаблонов. Однако шаблоны этим не ограничиваются, и можно обеспечить любой шаблон.
Когда процесс отображения увеличенной формы волны осуществляется вручную (S41: Нет), назначается интервал времени для осуществления увеличенного отображения. В частности, когда начальное время и конечное время временной оси вводятся как участок формы волны, который желательно увеличить (S42), форма волны, имеющая заданный интервал времени, отображается в увеличенном виде (S43). Согласно варианту осуществления заданный интервал времени может отображаться путем увеличения только горизонтальной оси в несколько раз без изменения диапазона вертикальной оси. Заметим, что метод ручной настройки не ограничивается вышеописанным и участок формы волны может отображаться в увеличенном виде путем увеличения его периферийного участка вокруг позиции, отмеченной с помощью мыши и т.п.
Согласно автоматическому методу настройки (S41: Да) производится определение, выбран ли какой-либо из методов дефектоскопии (S44). Согласно варианту осуществления, например, в нормальной дефектоскопии форма волны между 0 и tb+0,2tb увеличивается и отображается (S45), в наклонной дефектоскопии форма волны между td-0,5td и tc+0,2tc (S46), в методе SPOD форма волны между tD-0,5tD и tsb+0,5tsb увеличивается и отображается (S47), и в наклонной дефектоскопии и методе SPOD форма волны наклонной дефектоскопии между td-0,5td и tc+0,2tc и форма волны SPOD между tD-0,5tD и tsb+0,5tsb увеличиваются и отображаются (S48).
В этом случае интервал времени для осуществления увеличенного отображения служит лишь для примера, но не ограничения, т.е. его можно выбирать по необходимости. Кроме того, интервал времени можно задавать как параметр в зависимости от условий исследований, например, образца 26, например толщины образца.
Заметим, что в вышеописанном ультразвуковом дефектоскопическом исследовании высота дефекта измеряется на основании времен распространения соответствующих определенных форм волны. Хотя это не показано, ультразвуковое дефектоскопическое устройство, отвечающее настоящему изобретению, имеет средство измерения высоты дефекта, и высота дефекта измеряется по расчетной формуле, описанной ниже. Методы оценки высоты дефекта hr соответствующими методами дефектоскопии согласно варианту осуществления описаны ниже.
Формула измерения высоты дефекта для метода нормальной дефектоскопии представлена выражением 6.
[Выражение 6]
hr=(tb-tD N)c/2,
где tD N - время появления краевого эхо-сигнала.
Формула измерения высоты дефекта для метода наклонной дефектоскопии представлена выражением 7.
[Выражение 7]
hr=(tc-tD A)c cosθ/2,
где tD A - время появления краевого эхо-сигнала.
Формула измерения высоты дефекта для метода SPOD представлена выражением 8.
[Выражение 8]
hr=(tsb-tD)cL/2
Как описано выше, с помощью ультразвукового дефектоскопического устройства, отвечающего варианту осуществления, дефектоскопическое исследование можно выполнять совокупностью методов ультразвуковой дефектоскопии, только когда контролер выбирает методы дефектоскопии, отображаемые в блоке 7 отображения компьютера. Здесь предполагается, что соответствующие методы дефектоскопии выполняются конкретно согласно технологии существующего метода дефектоскопии, как описано выше.
На Фиг.11 и 12 показан второй вариант осуществления настоящего изобретения. Во втором варианте осуществления второй наклонный зонд 29 используется вместо нормального зонда 2 согласно первому варианту осуществления, метод TOFD можно выполнять вместо метода SPOD согласно первому варианту осуществления и ультразвуковое дефектоскопическое исследование можно выполнять методом наклонной дефектоскопии с двух направлений, с помощью двух наклонных зондов, т.е. второго наклонного зонда 29 и первого наклонного зонда 1, методом TOFD и комбинированным методом наклонной дефектоскопии и TOFD под управлением схемы 3 коммутации. Заметим, что конфигурация переключателей схемы 3 коммутации такова, что переключатели SW0 и SW1 вставлены между блоком Т передачи импульсного приемника 4 и первым наклонным зондом 1 последовательно, переключатель SW6 и регулируемый усилитель 28 вставлены последовательно между блоком R приема и вторым наклонным зондом 29, а также переключатель SW2 и регулируемый усилитель 28 для соединения блока R приема и первого наклонного зонда 1 располагаются рядом с переключателем SW6 и дополнительно переключатель SW3 призван соединять переднюю сторону переключателя SW1 и передние стороны переключателей SW2 и SW6.
(1) Первый режим
Когда переключатель SW1 и переключатель SW2 включаются, и переключатели SW3 и SW6 выключаются, только первый наклонный зонд 1 подключается к блоку T передачи и блоку R приема импульсного приемника 4 и только первый наклонный зонд 1 передает и принимает ультразвуковой пучок, благодаря чему можно выполнять так называемый наклонный режим дефектоскопии для приема краевого эхо-сигнала, как показано на Фиг.12A.
(2) Второй режим
Когда переключатели SW1 и SW6 включаются и переключатели SW2 и SW3 выключаются, первый наклонный зонд 1 подключается к блоку T передачи импульсного приемника 4 и второй наклонный зонд 29 подключается к блоку R приема импульсного приемника 4 соответственно, благодаря чему можно выполнять так называемый режим TOFD, в котором дифрагированная волна и поверхностная волна, порожденные ультразвуковой волной, падающей от первого наклонного зонда 1, принимаются вторым наклонным зондом 29, как показано на Фиг.12B.
(3) Третий режим
Когда переключатели SW1, SW2 и SW6 включаются и переключатель SW3 выключается, первый наклонный зонд 1 подключается к блоку T передачи и блоку R приема импульсного приемника 4 и второй наклонный зонд 29 подключается к блоку R приема импульсного приемника 4 соответственно, благодаря чему режим дефектоскопии можно выполнять посредством комбинации так называемого метода наклонной дефектоскопии и метода TOFD, в которой первый наклонный зонд 1 порождает падающую ультразвуковую волну и принимает краевой эхо-сигнал и второй наклонный зонд 29 принимает дифрагированную волну от дефекта 30.
(4) Четвертый режим
Когда переключатели SW3 и SW6 включаются и переключатели SW1 и SW2 выключаются, только второй наклонный зонд 29 подключается к блоку T передачи и блоку R приема импульсного приемника 4, благодаря чему можно выполнять так называемый наклонный режим дефектоскопии, в котором только второй наклонный зонд 29 порождает падающую ультразвуковую волну и принимает краевой эхо-сигнал. В частности, обеспечивается падение ультразвуковой волны с другого направления, чем в первом наклонном режиме дефектоскопии.
Параметры, используемые в процессе оценки времени пика, выполняемом во втором варианте осуществления, почти такие же, как в первом варианте осуществления. Однако зазор между зондами, используемый в методе TOFD, т.е. расстояние между первым наклонным зондом 1 и вторым наклонным зондом 29 предварительно задается вместо параметра "оценочная высота дефекта", используемого в методе SPOD.
Теперь поясним процесс оценки времени пика в режиме TOFD, который характерен для второго варианта осуществления. Время пика эхо-сигнала в методе TOFD означает донный эхо-сигнал и боковой эхо-сигнал, т.е. эхо-сигнал, порожденный поверхностной волной. Заметим, что время появления tB донного эхо-сигнала в методе TOFD определяется из выражения 9.
[Выражение 9]

Кроме того, время появления tL бокового эхо-сигнала определяется из выражения 10.
<Выражение 10>
tL=2s/cL+2td,
где s - величина половины зазора между зондами и cL - скорость продольной волны.
Кроме того, процесс отображения увеличения, который выполняется при выборе метода TOFD, отображает форму волны между tL-0,2tL и tB+0,5tB в режиме лупы. Здесь увеличенный диапазон приведен лишь для примера, и диапазон не ограничивается этим примером.
Кроме того, метод измерения высоты дефекта в методе TOFD представлен Выражением 11.
[Выражение 11]

Заметим, что t1, t2 обозначают моменты времени, когда эхо-сигналы появляются на верхнем и нижнем концах дефекта соответственно.
На Фиг.13 показан третий вариант осуществления настоящего изобретения. Третий вариант осуществления реализует вышеописанные первый и второй варианты осуществления посредством одного ультразвукового дефектоскопического устройства. В третьем варианте осуществления первый наклонный зонд 1, нормальный зонд 2 и второй наклонный зонд 29, расположенный напротив первого наклонного зонда 1 через нормальный зонд 2, избирательно переключаются между блоком T передачи и блоком R приема схемы 3 коммутации, что позволяет выполнять все режимы дефектоскопии, реализованные первым и вторым вариантами осуществления, т.е. семь режимов.
Схема 3 коммутации согласно варианту осуществления имеет семь переключателей с SW0 по SW6. Главный выключатель питания SW0 и перекидной переключатель SW1 вставлены между блоком T передачи импульсного приемника 4 и первым наклонным зондом 1 последовательно, тогда как переключатель SW6 вставлен последовательно между блоком R приема и вторым наклонным зондом 29. Кроме того, переключатели SW3 и SW5 вставлены последовательно с проводящим проводом, соединяющим блок T передачи и блок R приема до переключателя SW1 и до переключателя SW6, тогда как первый наклонный зонд 1 подключен между переключателями SW3 и SW5 через переключатель SW2 и регулируемый усилитель 28, а также нормальный зонд 2 подключен между переключателями SW3 и SW5 через переключатель SW4 и регулируемый усилитель 28.
(1) Первый режим
Когда переключатели SW1, SW2 и SW5 включаются и переключатели SW3, SW4 и SW6 выключаются, наклонный режим дефектоскопии выполняется с использованием только первого наклонного зонда 1.
(2) Второй режим
Когда переключатели SW1, SW4 и SW5 включаются и переключатели SW2, SW3 и SW6 выключаются, выполняется режим SPOD, который использует первый наклонный зонд 1 для передачи и нормальный зонд 2 для приема.
(3) Третий режим
Когда переключатели SW1, SW2, SW4 и SW5 включаются и переключатели SW3 и SW6 выключаются, режим дефектоскопии, который использует первый наклонный зонд 1 для передачи/приема и нормальный зонд 2 для приема, выполняется посредством комбинации метода наклонной дефектоскопии и метода SPOD.
(4) Четвертый режим
Когда переключатели SW3, SW4 и SW5 включаются и переключатели SW1, SW2 и SW6 выключаются, выполняется нормальный режим дефектоскопии, использующий только нормальный зонд 2.
(5) Пятый режим
Когда переключатели SW1 и SW6 включаются и переключатели SW2, SW3, SW4 и SW5 выключаются, выполняется режим TOFD, который использует первый наклонный зонд 1 для передачи и второй наклонный зонд 29 для приема.
(6) Шестой режим
Когда переключатели SW1, SW2, SW5 и SW6 включаются и переключатели SW3 и SW4 выключаются, режим дефектоскопии, который использует первый наклонный зонд 1 для передачи/приема и второй наклонный зонд 29 для приема, выполняется посредством комбинации метода наклонной дефектоскопии и метода TOFD.
(7) Седьмой режим
Когда переключатели SW3, SW5 и SW6 включаются и переключатели SW1, SW2 и SW4 выключаются, выполняется наклонный режим дефектоскопии, который использует только второй наклонный зонд 29.
Таким образом, третье ультразвуковое дефектоскопическое устройство и программа ультразвуковой дефектоскопии позволяют просто выбирать различные методы ультразвуковой дефектоскопии, например метод наклонной дефектоскопии в другом направлении, метод нормальной дефектоскопии, метод TOFD, метод SPOD и комбинации этих методов путем переключения шаблонов переключателя схемы коммутации.
Хотя вышеописанные варианты осуществления являются предпочтительными примерами настоящего изобретения, настоящее изобретение никоим образом не ограничивается ими и допускает различные модификации и варианты осуществления в пределах объема, который не отклоняется от сути настоящего изобретения. Например, ультразвуковое дефектоскопическое устройство, отвечающее настоящему изобретению, также можно использовать для фазированного матричного метода, использующего, например, фазированный матричный зонд. Кроме того, конфигурация проиллюстрированной схемы коммутации, например позиции переключателей, предназначена для иллюстрации, но не ограничения. Таким образом, можно использовать любую конфигурацию схемы, в которой зонды подключаются к импульсному приемнику 4 и отключаются от него путем включения и выключения переключателей.













Использование: для ультразвуковой дефектоскопии. Сущность заключается в том, что ультразвуковое дефектоскопическое устройство содержит наклонный зонд, нормальный зонд и схему коммутации, позволяющую по выбору переключать соединение наклонного зонда и нормального зонда с блоком передачи и блоком приема дефектоскопа, при этом схема коммутации может выбирать наклонный режим дефектоскопии для передачи и приема ультразвукового пучка только наклонным зондом, режим SPOD для передачи ультразвукового пучка наклонным зондом и приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, режим одновременного выполнения метода наклонной дефектоскопии и метода SPOD для передачи ультразвукового пучка наклонным зондом и приема отраженной волны наклонным зондом, а также приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, и нормальный режим дефектоскопии для передачи и приема ультразвукового пучка только нормальным зондом. Технический результат: обеспечение возможности выбора оптимального метода ультразвуковой дефектоскопии. 6 н. и 15 з.п. ф-лы, 19 ил.
1. Ультразвуковое дефектоскопическое устройство, содержащее наклонный зонд, нормальный зонд и схему коммутации, позволяющую по выбору переключать соединение наклонного зонда и нормального зонда с блоком передачи и блоком приема дефектоскопа, в котором схема коммутации может выбирать наклонный режим дефектоскопии для передачи и приема ультразвукового пучка только наклонным зондом, режим SPOD для передачи ультразвукового пучка наклонным зондом и приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, режим одновременного выполнения метода наклонной дефектоскопии и метода SPOD для передачи ультразвукового пучка наклонным зондом и приема отраженной волны наклонным зондом, а также приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, и нормальный режим дефектоскопии для передачи и приема ультразвукового пучка только нормальным зондом.
2. Ультразвуковое дефектоскопическое устройство по п.1, содержащее средство оценки времени пика для оценивания времени появления пика эхо-сигнала на основании параметров образца, предварительно заданных согласно режиму дефектоскопии, выбранному схемой коммутации, и средство отображения руководства для отображения позиции появления пика эхо-сигнала, оцененной средством оценки времени пика на временную ось блока отображения для отображения зарегистрированного пика эхо-сигнала посредством курсора.
3. Ультразвуковое дефектоскопическое устройство по п.2, содержащее средство оценки времени пика для оценивания времени появления пика эхо-сигнала на основании параметров образца, предварительно заданных согласно режиму дефектоскопии, выбранному схемой коммутации, и средство отображения руководства для отображения позиции появления пика эхо-сигнала, оцененной средством оценки времени пика на временную ось блока отображения для отображения зарегистрированного пика эхо-сигнала посредством курсора.
4. Ультразвуковое дефектоскопическое устройство по п.2, в котором средство отображения руководства изменяет цвет фона формы волны на блоке отображения в зависимости от выбранного режима дефектоскопии.
5. Ультразвуковое дефектоскопическое устройство по п.2, которое предписывает блоку отображения одновременно отображать формы волны, формируемые совокупностью методов ультразвуковой дефектоскопии, когда ультразвуковое дефектоскопическое исследование выполняется над образцами совокупностью методов ультразвуковой дефектоскопии.
6. Ультразвуковое дефектоскопическое устройство, содержащее первый наклонный зонд, второй наклонный зонд, расположенный напротив первого наклонного зонда, и схему коммутации, позволяющую по выбору переключать соединение соответствующих наклонных зондов с блоком передачи и блоком приема дефектоскопа, в котором схема коммутации может выбирать наклонный режим дефектоскопии для передачи и приема ультразвукового пучка только первым наклонным зондом, режим TOFD для передачи ультразвукового пучка первым наклонным зондом и приема поверхностной волны и дифрагированной волны вторым наклонным зондом, режим одновременного выполнения метода наклонной дефектоскопии и метода TOFD для передачи ультразвукового пучка первым наклонным зондом и приема отраженной волны первым наклонным зондом, а также приема поверхностной волны и дифрагированной волны вторым наклонным зондом, и наклонный режим дефектоскопии для передачи и приема ультразвукового пучка только вторым наклонным зондом.
7. Ультразвуковое дефектоскопическое устройство по п.6, содержащее средство оценки времени пика для оценивания времени появления пика эхо-сигнала на основании параметров образца, предварительно заданных согласно режиму дефектоскопии, выбранному схемой коммутации, и средство отображения руководства для отображения позиции появления пика эхо-сигнала, оцененной средством оценки времени пика на временную ось блока отображения для отображения зарегистрированного пика эхо-сигнала посредством курсора.
8. Ультразвуковое дефектоскопическое устройство по п.7, содержащее средство отображения увеличенной формы волны для отображения области предварительно указанного диапазона на блок отображения в увеличенном виде, причем отображаемая позиция курсора располагается в центре области.
9. Ультразвуковое дефектоскопическое устройство по п.7, в котором средство отображения руководства изменяет цвет фона формы волны на блоке отображения в зависимости от выбранного режима дефектоскопии.
10. Ультразвуковое дефектоскопическое устройство по п.7, которое предписывает блоку отображения одновременно отображать формы волны, формируемые совокупностью методов ультразвуковой дефектоскопии, когда ультразвуковое дефектоскопическое исследование выполняется над образцами совокупностью методов ультразвуковой дефектоскопии.
11. Ультразвуковое дефектоскопическое устройство, содержащее первый наклонный зонд, нормальный зонд, второй наклонный зонд, расположенный напротив первого наклонного зонда через нормальный зонд, и схему коммутации, позволяющую по выбору переключать соединение соответствующих наклонных зондов с блоком передачи и блоком приема дефектоскопа, в котором схема коммутации может выбирать наклонный режим дефектоскопии для передачи и приема ультразвукового пучка только первым наклонным зондом, режим SPOD для передачи ультразвукового пучка первым наклонным зондом и приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, режим одновременного выполнения метода наклонной дефектоскопии и метода SPOD для передачи ультразвукового пучка первым наклонным зондом и приема отраженной волны первым нормальным зондом, а также приема дифрагированной волны нормальным зондом, нормальный режим дефектоскопии для передачи и приема ультразвукового пучка только нормальным зондом, режим TOFD для передачи ультразвукового пучка первым наклонным зондом и приема поверхностной волны и дифрагированной волны вторым наклонным зондом, режим одновременного выполнения метода наклонной дефектоскопии и метода TOFD для передачи ультразвукового пучка первым наклонным зондом и приема отраженной волны первым наклонным зондом, а также приема поверхностной волны и дифрагированной волны вторым наклонным зондом, и наклонный режим дефектоскопии для передачи и приема ультразвукового пучка только вторым наклонным зондом.
12. Ультразвуковое дефектоскопическое устройство по п.11, содержащее средство оценки времени пика для оценивания времени появления пика эхо-сигнала на основании параметров образца, предварительно заданных согласно режиму дефектоскопии, выбранному схемой коммутации, и средство отображения руководства для отображения позиции появления пика эхо-сигнала, оцененной средством оценки времени пика на временную ось блока отображения для отображения зарегистрированного пика эхо-сигнала посредством курсора.
13. Ультразвуковое дефектоскопическое устройство по п.12, содержащее средство отображения увеличенной формы волны для отображения области предварительно указанного диапазона на блок отображения в увеличенном виде, причем отображаемая позиция курсора располагается в центре области.
14. Ультразвуковое дефектоскопическое устройство по п.12, в котором средство отображения руководства изменяет цвет фона формы волны на блоке отображения в зависимости от выбранного режима дефектоскопии.
15. Ультразвуковое дефектоскопическое устройство по п.12, которое предписывает блоку отображения одновременно отображать формы волны, формируемые совокупностью методов ультразвуковой дефектоскопии, когда ультразвуковое дефектоскопическое исследование выполняется над образцами совокупностью методов ультразвуковой дефектоскопии.
16. Компьютером считываемый носитель, содержащий сохраненную на нем программу ультразвуковой дефектоскопии, которая, когда исполняется на компьютере, предписывает компьютеру, который управляет схемой коммутации для произвольного переключения соединения наклонного зонда и нормального зонда с блоком передачи и блоком приема импульсного приемника, выполнять процесс выбора цепи для управления переключением схемы коммутации согласно выбранному режиму дефектоскопии, посредством блока ввода, из наклонного режима дефектоскопии для передачи и приема ультразвукового пучка только наклонным зондом, режима SPOD для передачи ультразвукового пучка наклонным зондом и приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, режима одновременного выполнения метода наклонной дефектоскопии и метода SPOD для передачи ультразвукового пучка наклонным зондом и приема отраженной волны наклонным зондом, а также приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, и нормального режима дефектоскопии для передачи и приема ультразвукового пучка только нормальным зондом.
17. Компьютером считываемый носитель по п.16, причем в блоке памяти предварительно сохраняются параметры соответствующих выбранных режимов дефектоскопии, которые необходимы для оценивания времени появления пика эхо-сигнала, регистрируемого в выбранном режиме дефектоскопии, и компьютеру предписывается выполнять процесс оценки времени пика для предписания блоку арифметических операций вычислять время появления пика эхо-сигнала с использованием параметров из блока памяти в качестве входных значений и процесс отображения руководства для отображения курсора, который показывает позицию появления пика эхо-сигнала, оцененную в процессе оценки времени пика, на временную ось регистрируемого эхо-сигнала, отображаемого на блоке отображения.
18. Компьютером считываемый носитель, содержащий сохраненную на нем программу ультразвуковой дефектоскопии, которая, когда исполняется на компьютере, предписывает компьютеру, который управляет схемой коммутации для произвольного переключения соединения первого наклонного зонда и второго наклонного зонда, расположенного напротив первого наклонного зонда, с блоком передачи и блоком приема импульсного приемника, выполнять процесс выбора цепи для управления переключением схемы коммутации согласно выбранному режиму дефектоскопии, посредством блока ввода, из наклонного режима дефектоскопии для передачи и приема ультразвукового пучка только первым наклонным зондом, режима TOFD для передачи ультразвукового пучка первым наклонным зондом и приема поверхностной волны и дифрагированной волны вторым наклонным зондом, режима одновременного выполнения метода наклонной дефектоскопии и метода TOFD для передачи ультразвукового пучка первым наклонным зондом и приема отраженной волны первым наклонным зондом, а также приема поверхностной волны и дифрагированной волны вторым наклонным зондом, и наклонного режима дефектоскопии для передачи и приема ультразвукового пучка только вторым наклонным зондом.
19. Компьютером считываемый носитель по п.18, при этом в блоке памяти предварительно сохраняются параметры соответствующих выбранных режимов дефектоскопии, которые необходимы для оценивания времени появления пика эхо-сигнала, регистрируемого в выбранном режиме дефектоскопии, и компьютеру предписывается выполнять процесс оценки времени пика для предписания блоку арифметических операций вычислять время появления пика эхо-сигнала с использованием параметров из блока памяти в качестве входных значений и процесс отображения руководства для отображения курсора, который показывает позицию появления пика эхо-сигнала, оцененную в процессе оценки времени пика, на временную ось регистрируемого эхо-сигнала, отображаемого на блоке отображения.
20. Компьютером считываемый носитель, содержащий сохраненную на нем программу ультразвуковой дефектоскопии, которая, когда исполняется на компьютере, предписывает компьютеру, который управляет схемой коммутации для произвольного переключения соединения первого наклонного зонда, нормального зонда, и второго наклонного зонда, расположенного напротив первого наклонного зонда, с блоком передачи и блоком приема импульсного приемника, выполнять процесс выбора цепи для управления переключением схемы коммутации согласно выбранному режиму дефектоскопии, посредством блока ввода, из наклонного режима дефектоскопии для передачи и приема ультразвукового пучка только наклонным зондом, режима SPOD для передачи ультразвукового пучка первым наклонным зондом и приема дифрагированной волны, распространяющейся по дефектоскопической поверхности над дефектом, нормальным зондом, режима одновременного выполнения метода наклонной дефектоскопии и метода SPOD для передачи ультразвукового пучка первым наклонным зондом и приема отраженной волны первым наклонным зондом, а также приема дифрагированной волны наклонным зондом, нормального режима дефектоскопии для передачи и приема ультразвукового пучка только нормальным зондом, режима TOFD для передачи ультразвукового пучка первым наклонным зондом и приема поверхностной волны и дифрагированной волны вторым наклонным зондом, режима одновременного выполнения метода наклонной дефектоскопии и метода TOFD для передачи ультразвукового пучка первым наклонным зондом и приема отраженной волны первым наклонным зондом, а также приема поверхностной волны и дифрагированной волны вторым наклонным зондом, и наклонного режима дефектоскопии для передачи и приема ультразвукового пучка только вторым наклонным зондом.
21. Компьютером считываемый носитель по п.20, при этом в блоке памяти предварительно сохраняются параметры соответствующих выбранных режимов дефектоскопии, которые необходимы для оценивания времени появления пика эхо-сигнала, регистрируемого в выбранном режиме дефектоскопии, и компьютеру предписывается выполнять процесс оценки времени пика для предписания блоку арифметических операций вычислять время появления пика эхо-сигнала с использованием параметров из блока памяти в качестве входных значений и процесс отображения руководства для отображения курсора, который показывает позицию появления пика эхо-сигнала, оцененную в процессе оценки времени пика, на временную ось регистрируемого эхо-сигнала, отображаемого на блоке отображения.
| Способ ультразвукового контроля изделий | 1989 |
|
SU1705735A1 |
| Способ ультразвукового теневого контроля изделий | 1987 |
|
SU1430877A1 |
| Способ ультразвукового томографического контроля изделий | 1990 |
|
SU1817019A1 |
| Ультразвуковой способ определения размера дефекта | 1977 |
|
SU648904A1 |
| Способ ультразвукового контроля | 1982 |
|
SU1051418A1 |
| JP 2001228126 A, 24.08.2001 | |||
| JP 2006162321 A, 22.06.2006 | |||
| JP 2001215218 A, 10.08.2001 | |||
| Стенд для исследования конструкций бульдозерного оборудования | 1982 |
|
SU1046644A1 |

