Изобретение относится к легкой промышленности и, в частности, к оборудованию для сборки пружинных блоков, применяемых для изготовления мягкой мебели, сидений транспортных средств и т.п.
Известны механизмы для сборки пружинных блоков, в которых через накопители пружины формируются в блоки пружин различной конфигурации в зависимости от формы изготовляемой продукции, будь-то кресло или диван. Сформированные блоки сшиваются, после чего изделие поступает на обтяжку оболочкой (патент США №3071165, B21F 27/16, 1967).
Известен также автомат для сборки пружинных блоков, содержащий раму с установленными на ней устройством для укладки пружин в ряд, механизмом перемещения рядов пружин и устройством для сборки рядов пружин в блоки (патент США №3774652, B21F 27/16, 1973).
Известные механизмы характеризуются низкой производительностью.
Известен «Автомат для сборки пружинных блоков», принятый за прототип (патент РФ №2080198, МПК B21F 27/16, 33/04, опубл. 27.05.97, Бюл. №15), содержащий установленные на раме устройство для укладки пружин в ряд, механизм захвата и перемещения рядов пружин и устройство для сборки рядов пружин в блок посредством подачи и вращения соединительной спирали. Устройство для укладки пружин в ряд содержит накопитель с упорами, каретку с приводом возвратно-поступательного перемещения. Механизм перемещения рядов пружин выполнен в виде каретки перемещения ряда пружин, подпружиненных кулис, взаимодействующих с осью, закрепленной на каретке устройства для укладки пружин в ряд. Кулисы через системы рычагов связаны с кареткой перемещения рядов пружин, на которой размещен поворотный вал с закрепленными на нем рычагами захвата пружин и дополнительными кулисами. Устройство для сборки пружин в блок выполнено в виде установленных на раме по месту соединения соседних рядов пружин направляющих для соединительной спирали. Направляющие состоят из двух элементов, один из которых закреплен на раме, а другой - на двуплечем рычаге, подпружиненном относительно рамы и связанном посредством свободного плеча с поворотным валом механизма перемещения рядов пружин, а также узла подачи и вращения соединительной спирали.
Однако из-за сложности конструкции, включающей отдельные блоки захвата, перемещения и удержания пружин при их сшивке, автомат недостаточно надежен в работе, что отрицательно влияет на повышение производительности изготовления блоков пружин.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключается в повышении надежности и быстродействия механизма, повышении производительности при одновременном упрощении конструкции.
Технический результат достигается тем, что в механизме захвата, перемещения и удержания пружин для сшивки их в пружинный блок новым является то, что он содержит две поворотные в одной плоскости цанги, одна из которых, имеющая больший радиус поворота, выполнена с возможностью дополнительного поворота ее захватывающей части в плоскости поворота цанг при повороте их в противоположные стороны и возврата этой части в исходное фиксированное положение при возвратном движении цанг с обеспечением захвата опорных колец пружин и перемещения их, при этом рабочие участки цанг в конце возвратного движения образуют замкнутый контур для удержания опорных колец соединяемых пружин при их сшивке.
Цанги выполнены в виде зубчатых секторов с возможностью поворота в одной плоскости, их оси жестко закреплены на боковых пластинах, параллельных плоскости поворота зубчатых секторов, со смещением относительно друг друга по вертикали.
Цанга с большим радиусом поворота установлена своей. захватывающей частью на оси и подпружинена в упор.
Цанги выполнены с рабочими участками в виде гребенки с угловыми зубьями для обеспечения точечного прижима опорных колец соединяемых пружин с противоположных сторон.
Сущность изобретения поясняется на фиг.1, 2, где:
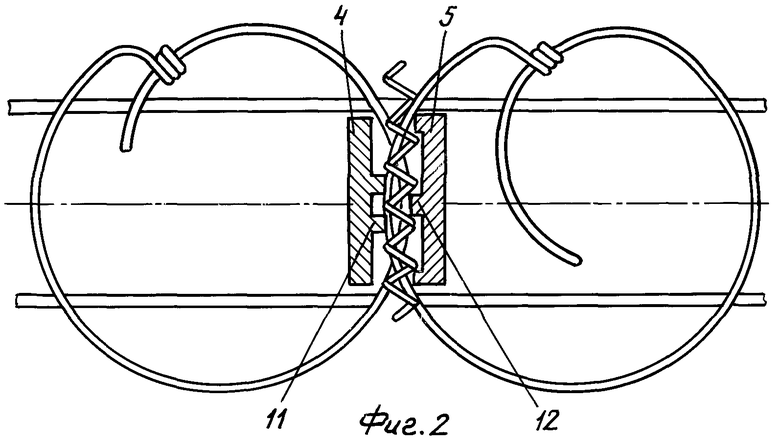
фиг.1 - кинематическая схема механизма захвата, перемещения и удержания пружин при сшивке их в пружинный блок;
фиг 2 - рабочие участки цанг.
Здесь:
1 - цанга с большим радиусом поворота;
2 - цанга с меньшим радиусом поворота;
3 - захватывающая часть цанги 1 с большим радиусом поворота;
4, 5 - рабочие участки цанг 1 и 2 соответственно;
6 - кронштейн, на котором закреплена захватывающая часть цанги с большим углом поворота 3;
7 - ось кронштейна 4;
8 - пружина, подпружинивающая захватывающую часть цанги 3;
9 - упор на зубчатом секторе цанги с большим радиусом поворота 1;
10 - пластины для крепления осей зубчатых секторов 1 и 2;
11, 12 - зубья рабочих участков 4 и 5 цанг;
а, в, с - 2-х конусные сшиваемые пружины;
О1 и О2 - оси вращения соответственно зубчатых секторов цанги с большим радиусом поворота 1 и цанги с меньшим радиусом поворота 2.
Механизм захвата, перемещения и удержания пружин для сшивки их в пружинный блок содержит две кинематически связанные между собой. цанги 1 и 2, выполненные в виде зубчатых секторов с возможностью поворота в одной плоскости, при этом цанга 1 имеет больший радиус поворота, а цанга 2 имеет меньший радиус поворота. Оси О1 и О2 соответственно цанг 1 и 2 жестко закреплены на боковых пластинах 10, установленных параллельно плоскости их поворота, при этом ось О2 цанги 2 смещена относительно оси О1 цанги 1 по вертикали.
Цанга 1 имеет захватывающую часть 3, выполненную с возможностью ее поворота в плоскости поворота цанг 1 и 2 при повороте их в противоположные стороны и возврата этой части в исходное фиксированное положение. При возвратном движении цанг 1 и 2 захватывающая часть 3 обеспечивает захват опорных колец пружин «в» и «с» и перемещает их в место сшивки, при этом рабочие участки 4, 5 соответственно цанг 1, 2 в конце возвратного движения образуют замкнутый контур для удержания опорных колец соединяемых пружин «в» и «с» при их сшивке. Захватывающая часть 3 цанги 1 установлена на оси 7 кронштейна 6 и подпружинена в упор 9. Рабочие участки 4, 5 выполнены в виде гребенок с угловыми зубьями 11, 12, обеспечивая при работе точечный прижим опорных колец соединяемых пружин с противоположных сторон, при этом шаг зубьев угловой гребенки соответствует шагу спирали, соединяющей опорные кольца пружин.
Цанги 1 и 2 на своих осях О1 и О2 закреплены между пластинами 10, установленными на станине механизма (не показано).
Механизм захвата, перемещения и удержания 2-х конусных пружин при сшивки их в пружинный блок работает следующим образом. При повороте цанг 1 и 2 вокруг осей О1 и O2 в противоположные стороны захватывающая часть 3 цанги 1, находясь в фиксированном положении на упоре 9, входит в контакт с опорными кольцами пружин (в) и (с). При дальнейшем движении цанги 1 вокруг оси O1 ее захватывающая часть 3 за счет усилия при контакте с пружинами выходит из фиксированного положения, поворачивается вокруг оси 7 в сторону движения цанги 1 и растягивает пружину 8. Пройдя внутрь опорного кольца пружины (с), захватывающая часть 3 усилием пружины 8 прижимается к упору 9 на зубчатом секторе 1, после чего начинается возвратный поворот цанг 1 и 2 вокруг осей О1 и О2. При возвратном повороте цанг 1 и 2 захватывающая часть 3 цанги 1 захватывает и продвигает пружины (с) и (в), а также пружину (а), соединенную с пружиной (в) соединительной спиралью (не показана). В конце движения рабочие участки 4 и 5 соответственно цанг 1 и 2 образуют замкнутый контур, в котором находятся соединяемые спиралью опорные кольца 2-х конусных пружин (в) и (с).
Угловые зубья 11, 12 рабочих участков 4, 5 цанг 1 и 2 обеспечивают при работе точечный прижим опорных колец соединяемых пружин с противоположных сторон, ориентируя сшивающую спираль внутри замкнутого контура.
Таким образом, предлагаемый механизм объединяет в себе несколько механизмов, обеспечивая путем осуществления поворота зубчатых секторов во взаимно противоположных направлениях несколько функций - захват опорных колец пружин, перемещение в зону сшивки и удержание их при сшивки в пружинный блок. Механизм компактный, надежный в работе, так как имеет минимальное количество подвижных частей, обеспечивает высокую производительность при сшивке пружин в пружинные блоки, что приводит к снижению энергоемкости и, следовательно, к повышению экономичности производства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ ОДНОВРЕМЕННОГО ИЗГОТОВЛЕНИЯ СКОБ И СКРЕПЛЕНИЯ ИМИ ЭЛЕМЕНТОВ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ, НАПРИМЕР ПРУЖИН И РАМОК ПРУЖИННЫХ МАТРАСОВ | 2001 |
|
RU2199414C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДВУХКОНУСНЫХ ПРУЖИН ДЛЯ МЕБЕЛИ (ВАРИАНТЫ) | 2003 |
|
RU2246372C1 |
| АВТОМАТ ДЛЯ СБОРКИ ПРУЖИННЫХ БЛОКОВ | 1993 |
|
RU2080198C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ И РЕЗКИ ПРОВОЛОКИ, ПРУТКОВ, ЛЕНТЫ И ДРУГИХ ПОДОБНЫХ МАТЕРИАЛОВ | 2003 |
|
RU2253531C1 |
| УСТРОЙСТВО СБОРКИ ПРУЖИННОГО БЛОКА, УЗЕЛ ФОРМИРОВАНИЯ СКОБЫ И УЗЕЛ ПОДАЧИ ДЛИННОМЕРНОГО МАТЕРИАЛА ДЛЯ НЕГО | 2004 |
|
RU2277028C1 |
| Роторное передающее устройство | 1991 |
|
SU1821331A1 |
| Устройство для заневоливания пружин | 1979 |
|
SU1015147A1 |
| Роторный автомат | 1984 |
|
SU1255392A1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Установка для очистки изделий | 1989 |
|
SU1622033A1 |
Изобретение относится к легкой промышленности и может быть использовано в оборудовании для сборки пружинных блоков, применяемых для изготовления мягкой мебели, сидений транспортных средств. Механизм содержит две поворотные в одной плоскости цанги, одна из которых, имеющая больший радиус поворота, выполнена с возможностью дополнительного поворота ее захватывающей части в плоскости поворота цанг при повороте их в противоположные стороны и возврата этой части в исходное фиксированное положение при возвратном движении цанг с обеспечением захвата опорных колец пружин и перемещения их. Рабочие участки цанг в конце возвратного движения образуют замкнутый контур для удержания опорных колец соединяемых пружин при их сшивке. Повышаются надежность, быстродействие механизма и производительность, упрощается конструкция. 3 з.п. ф-лы, 2 ил.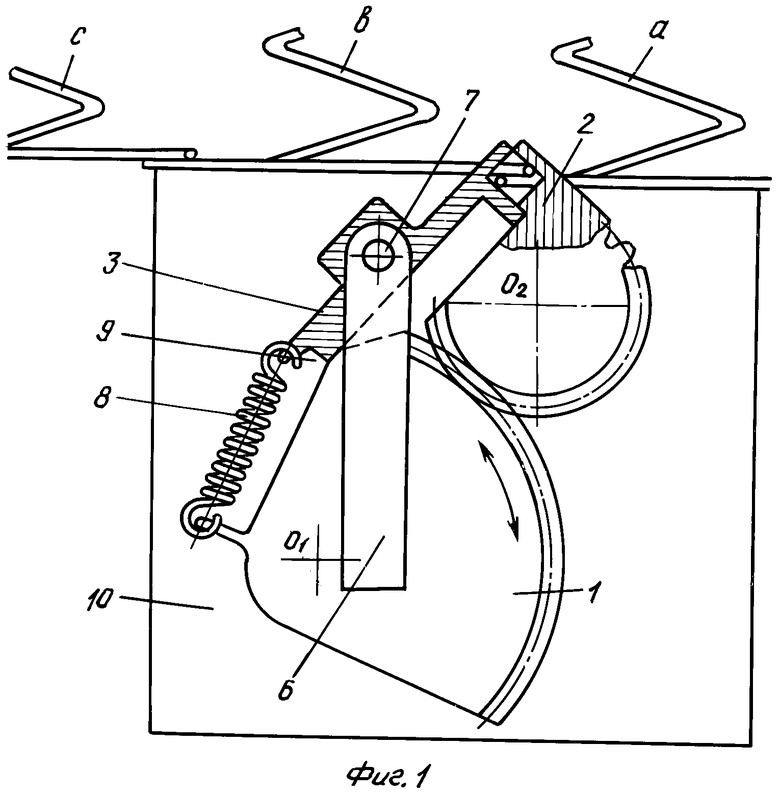
1. Механизм захвата, перемещения и удержания пружин при сшивке их в пружинный блок, отличающийся тем, что он содержит две поворотные в одной плоскости цанги, одна из которых, имеющая больший радиус поворота, выполнена с возможностью дополнительного поворота ее захватывающей части в плоскости поворота цанг при повороте их в противоположные стороны и возврата этой части в исходное фиксированное положение при возвратном движении цанг с обеспечением захвата опорных колец пружин и перемещения их, при этом рабочие участки цанг в конце возвратного движения образуют замкнутый контур для удержания опорных колец соединяемых пружин при их сшивке.
2. Механизм по п.1, отличающийся тем, что цанги выполнены в виде зубчатых секторов с возможностью поворота в одной плоскости, их оси жестко закреплены на боковых пластинах, параллельных плоскости поворота зубчатых секторов, со смещением относительно друг друга по вертикали.
3. Механизм по п.1, отличающийся тем, что цанга с большим радиусом поворота установлена своей захватывающей частью на оси и подпружинена в упор.
4. Механизм по п.1, отличающийся тем, что цанги выполнены с рабочими участками в виде гребенки с угловыми зубьями для обеспечения точечного прижима опорных колец соединяемых пружин с противоположных сторон.
| АВТОМАТ ДЛЯ СБОРКИ ПРУЖИННЫХ БЛОКОВ | 1993 |
|
RU2080198C1 |
| Устройство для подачи проволочных пружин к машине для сборки пружинных каркасов | 1979 |
|
SU923353A3 |
| RU 93016893 A, 27.11.1995 | |||
| RU 96121926 A1, 27.12.1998 | |||
| US 3740984 A, 26.06.1973. | |||

