Изобретение относится к электротехнике, преимущественно к электрическим машинам и измерительной технике, предназначено для определения частоты тока ротора асинхронного двигателя.
Аналоги способов определения частоты тока ротора асинхронного двигателя авторам неизвестны.
Задачей изобретения является создание способа определения частоты тока ротора асинхронного двигателя.
Поставленная задача решена за счет того, что способ определения частоты тока ротора асинхронного двигателя заключается в том, что в установившемся режиме функционирования асинхронного двигателя одновременно регистрируют мгновенные величины токов трех фаз питания статора, определяют модуль результирующего вектора тока статора is, затем одновременно проводят дискретное преобразование Фурье модуля результирующего вектора тока статора и одного из токов статора, получая амплитудно-частотные характеристики модуля результирующего вектора тока статора и одного из токов статора, из которых выделяют основную частотную составляющую fs0 модуля результирующего вектора тока статора в диапазоне частот от 0 до 50 Гц и основную, с наибольшей амплитудой, составляющую одного из токов статора с частотой fc питающей сети, используя которые определяют частоту тока ротора
fp=fc-2·fs0.
Модуль результирующего вектора тока статора определяют по выражению

где ia, ib, ic - мгновенные токи обмоток статора (Гармаш B.C. Метод контроля исправности стержней ротора короткозамкнутого асинхронного двигателя // ИВУЗ. Энергетика. 1990. №10. С.50-52).
Экспериментальные исследования показали, что для исключения случаев неправильного определения частоты тока ротора амплитудно-частотную характеристику модуля результирующего вектора тока статора необходимо определить в диапазоне частот от 0 до 50 Гц.
Данный способ определения частоты тока ротора прост в осуществлении и позволяет определять частоту тока ротора с достаточно высокой точностью.
На фиг.1 приведена схема устройства, реализующего рассматриваемый способ определения частоты тока ротора асинхронного двигателя.
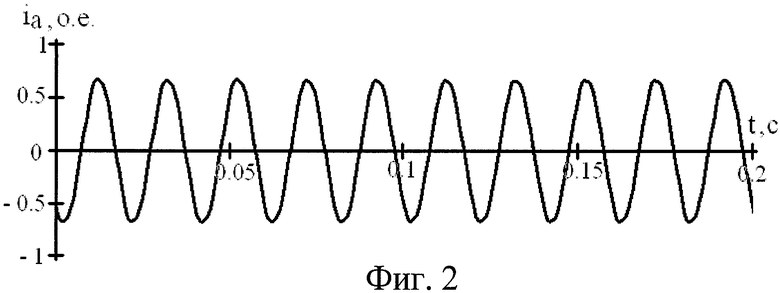
На фиг.2 приведена осциллограмма тока фазы А статора асинхронного двигателя.
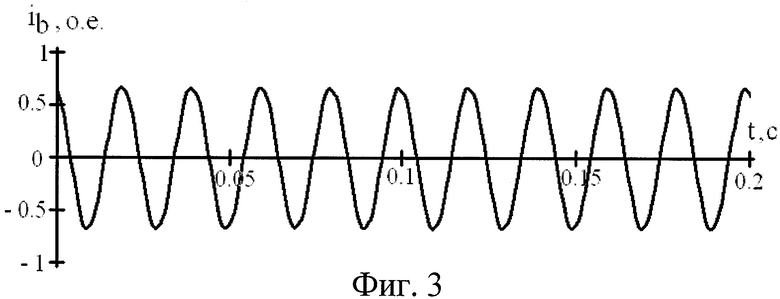
На фиг.3 приведена осциллограмма тока фазы В статора асинхронного двигателя.
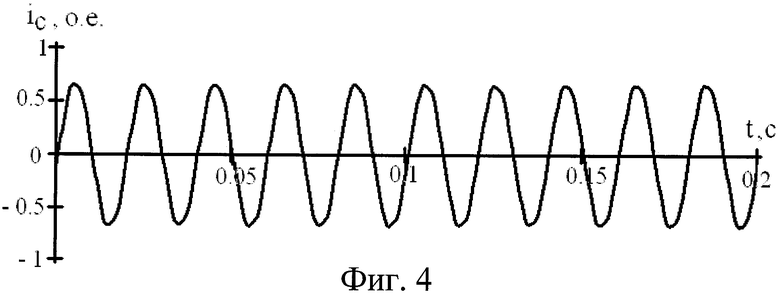
На фиг.4 приведена осциллограмма тока фазы С статора асинхронного двигателя.
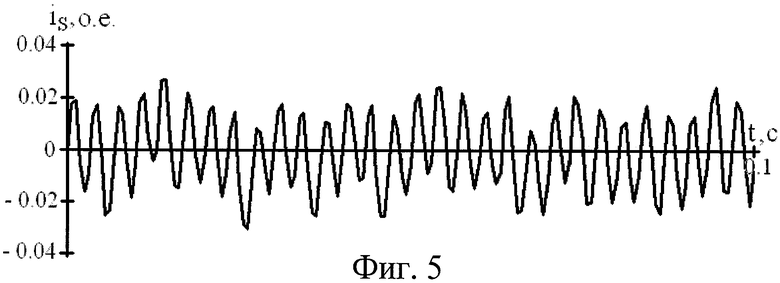
На фиг.5 приведена осциллограмма модуля результирующего вектора тока статора асинхронного двигателя.
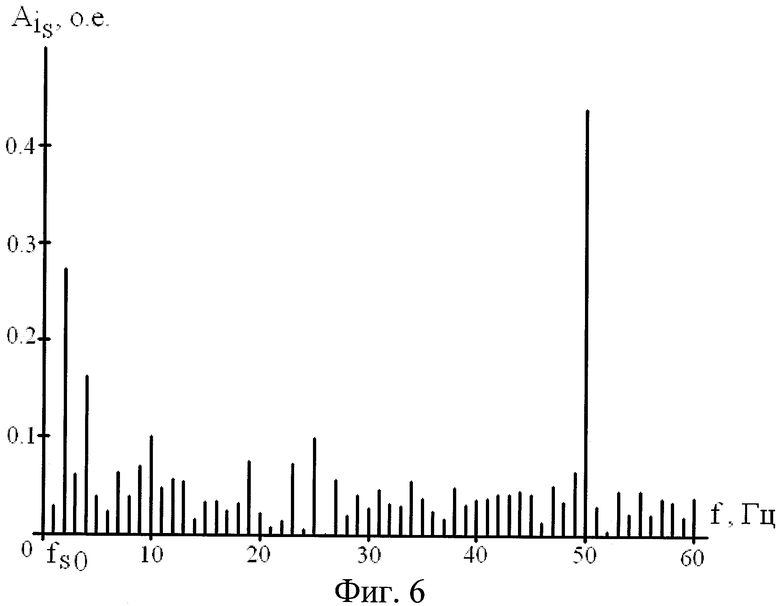
На фиг.6 приведена амплитудно-частотная характеристика модуля результирующего вектора тока статора асинхронного двигателя.
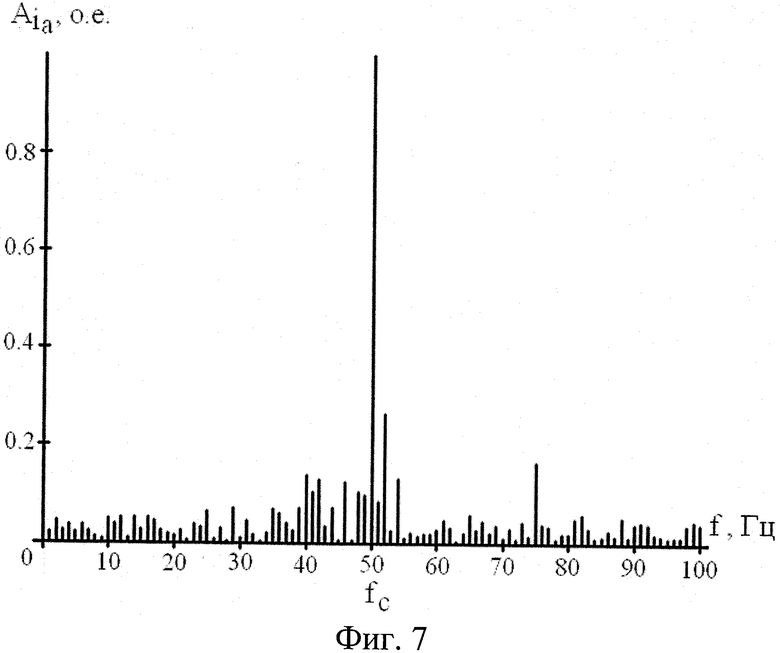
На фиг.7 приведена амплитудно-частотная характеристика тока одной из фаз статора асинхронного двигателя.
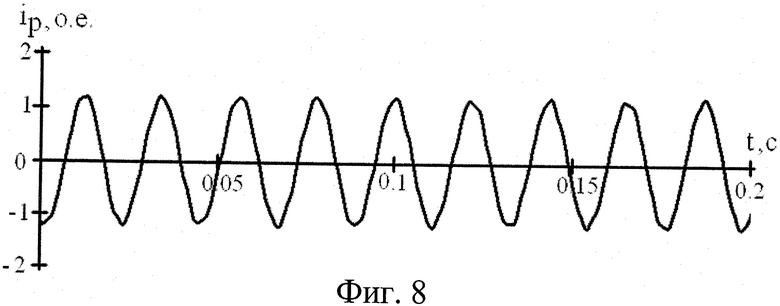
На фиг.8 приведена осциллограмма тока одной из фаз ротора асинхронного двигателя.
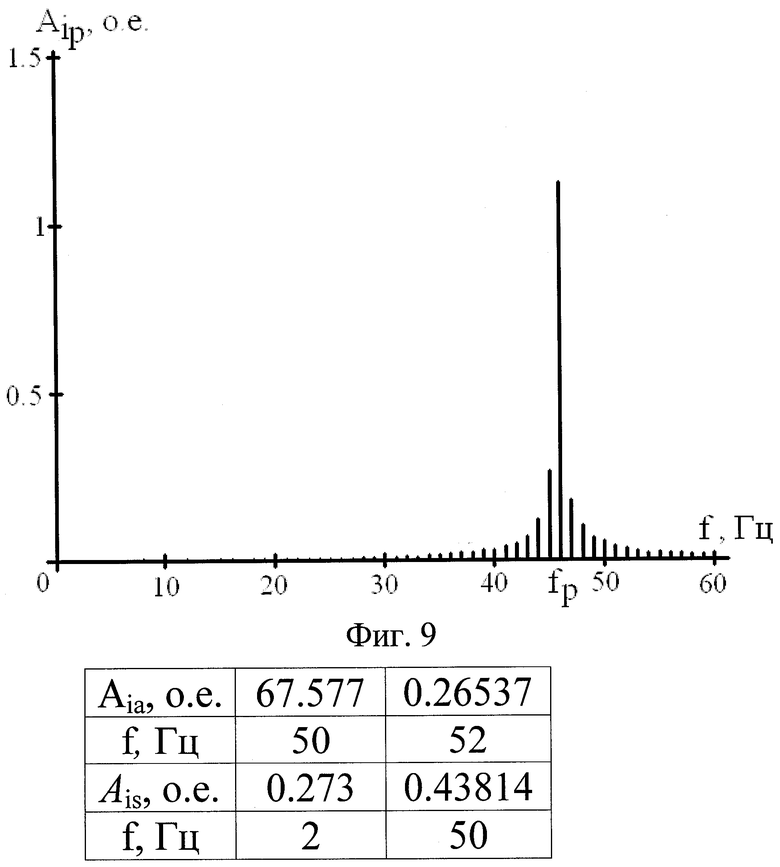
На фиг.9 приведена амплитудно-частотная характеристика тока одной из фаз ротора асинхронного двигателя.
В таблице (см. в граф. части) приведены наибольшие амплитуды и соответствующие им частоты амплитудно-частотных характеристик сигналов.
Заявленный способ может быть осуществлен с помощью устройства (фиг.1), содержащего первый датчик сигнала 1 (ДС1), подключенный к первой фазе статора асинхронного двигателя. К первому датчику сигнала 1 (ДС1) последовательно подключены программатор определения модуля результирующего вектора тока статора 2 (ПМРВТС), первый программатор дискретного преобразования Фурье 3 (ПДПФ1), первый программатор выделения основной частоты 4 (ПОЧ1) и программатор определения частоты тока ротора 5 (ПЧТР), который связан с дисплеем или ЭВМ (не показано на фиг.1). Второй датчик сигнала 6 (ДС2) подключен ко второй фазе статора асинхронного двигателя. Ко второму датчику сигнала 6 (ДС2) подключен программатор определения модуля результирующего вектора тока статора 2 (ПМРВТС). Третий датчик сигнала 7 (ДС3) подключен к третьей фазе статора асинхронного двигателя. К третьему датчику сигнала 7 (ДС3) подключен программатор определения модуля результирующего вектора тока статора 2 (ПМРВТС). К первому датчику сигнала 1 (ДС1) последовательно подключены второй программатор дискретного преобразования Фурье 8 (ПДПФ2), второй программатор выделения основной частоты 9 (ПОЧ2) и программатор определения частоты тока ротора 5 (ПЧТР).
В качестве датчиков сигнала 1 (ДС1), 6 (ДС2) и 7 (ДС3) могут быть использованы датчики тока - промышленный прибор КЭИ-0,1. Программатор определения модуля результирующего вектора тока статора 2 (ПМРВТС), программаторы дискретного преобразования Фурье 3 (ПДПФ1) и 8 (ПДПФ2), программаторы выделения основной частоты 4 (ПОЧ1) и 9 (ПОЧ2), программатор определения частоты тока ротора 5 (ПЧТР) могут быть выполнены на микроконтроллере серии 51 производителя amtel AT89S53.
Для проверки работоспособности предложенного способа определения скольжения первый датчик сигнала 1 (ДС1) подключили к фазе А статора питания универсального асинхронного двигателя с фазным ротором (2p=4, nc=1500 об/мин), второй датчик сигнала 6 (ДС2) подключили к фазе В статора, третий датчик сигнала 7 (ДСЗ) подключили к фазе С статора. Одновременно регистрировали мгновенные значения токов ia, ib, ic статора в установившемся режиме функционирования асинхронного двигателя в течение 1 с (фиг.2, фиг.3, фиг.4). Используя полученные значения в программаторе определения модуля результирующего вектора тока статора 2 (ПМРВТС), определили модуль результирующего вектора тока статора (фиг.5) по выражению (1). В программаторах дискретного преобразования Фурье 3 (ПДПФ1) и 8 (ПДПФ2) одновременно провели дискретное преобразование Фурье модуля результирующего вектора тока статора и тока ia питания фазы А обмотки статора и получили амплитудно-частотные характеристики модуля результирующего вектора тока статора в диапазоне частот от 0 до 50 Гц и тока ia питания фазы А обмотки статора. Зависимость амплитуды модуля результирующего вектора тока статора Ais, о.е. от частоты f, Гц приведена на фиг.6. Зависимость амплитуды тока одной из фаз питания Aia, о.е. от частоты f, Гц приведена на фиг.6. В таблице представлены наибольшие амплитуды токов и соответствующие им частоты. Далее в программаторах выделения основной частоты 4 (ПОЧ1) и 9 (ПОЧ2) выделили основную частотную составляющую fs0=2 Гц модуля результирующего вектора тока статора и основную составляющую с наибольшей амплитудой потребляемого тока с частотой питающей сети fc=50 Гц. Выделенные частоты fs0 и fc передали в программатор определения частоты тока ротора 5 (ПЧТР), где определили частоту тока ротора fp,
fp=fc-2·fs0=50-2·2=46 Гц.
Для проверки правильности определения частоты тока ротора в фазу А ротора асинхронного двигателя включили датчик тока (фиг.8). Частота тока ротора fp=46 Гц (фиг.9).
Таким образом, хорошо совпадают результаты расчета с экспериментальными данными.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2397505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ | 2009 |
|
RU2390036C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ТОКА РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2405161C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2624986C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2791428C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПО ТОКУ СТАТОРА | 2014 |
|
RU2559162C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2441249C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2021 |
|
RU2763849C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2495444C1 |
Изобретение относится к электротехнике, в частности к электрическим машинам измерительной техники. В установившемся режиме функционирования асинхронного электродвигателя одновременно регистрируют мгновенные величины токов трех фаз питания статора. Определяют модуль результирующего вектора тока статора. Затем одновременно проводят дискретное преобразование Фурье модуля результирующего вектора тока статора и одного из токов статора, получая амплитудно-частотные характеристики модуля результирующего вектора тока статора и одного из токов статора, из которых выделяют основную частотную составляющую fs0 модуля результирующего вектора тока статора в диапазоне частот от 0 до 50 Гц и основную, с наибольшей амплитудой, составляющую одного из токов статора с частотой fc питающей сети, используя которые определяют частоту тока ротора fp=fc-2·fs0. Модуль результирующего вектора тока статора определяют по выражению  , где ia, ib, ic - мгновенные токи обмоток статора. Технический результат заключается в повышении точности определения частоты тока ротора. 1 з.п. ф-лы, 9 ил., 1 табл.
, где ia, ib, ic - мгновенные токи обмоток статора. Технический результат заключается в повышении точности определения частоты тока ротора. 1 з.п. ф-лы, 9 ил., 1 табл.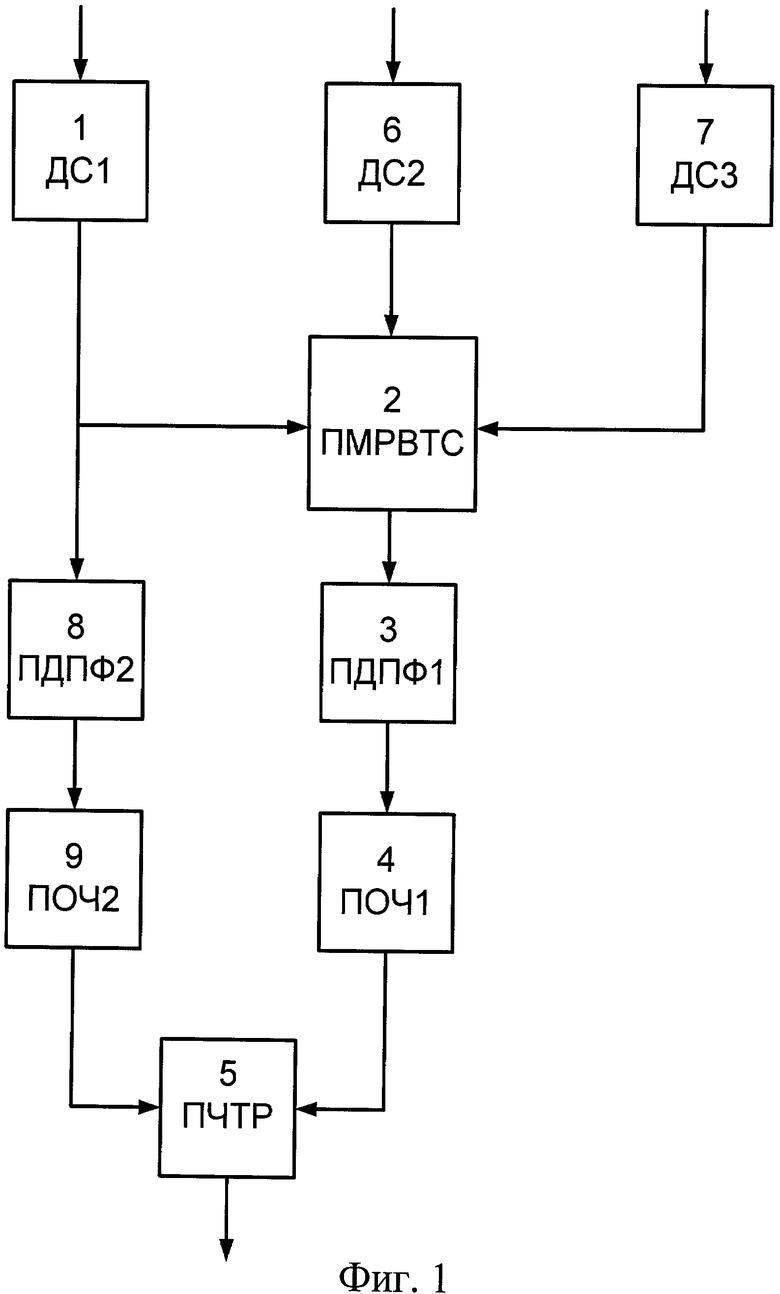
1. Способ определения частоты тока ротора асинхронного двигателя, отличающийся тем, что в установившемся режиме функционирования асинхронного электродвигателя одновременно регистрируют мгновенные величины токов трех фаз питания статора, определяют модуль результирующего вектора тока статора is, затем одновременно проводят дискретное преобразование Фурье модуля результирующего вектора тока статора и одного из токов статора, получая амплитудно-частотные характеристики модуля результирующего вектора тока статора и одного из токов статора, из которых выделяют основную частотную составляющую fs0 модуля результирующего вектора тока статора в диапазоне частот от 0 до 50 Гц и основную с наибольшей амплитудой составляющую одного из токов статора с частотой fc питающей сети, используя которые определяют частоту тока ротора
fp=fc-2·fs0.
2. Способ по п.1, отличающийся тем, что модуль результирующего вектора тока статора определяют по выражению
 ,
,
где ia, ib, ic - мгновенные токи обмоток статора.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЛИНЕЙНОЙ КОНДЕНСАТОРНОЙ БАТАРЕИ ДЛЯ ПОСТРОЕНИЯ ЕЕ МОДЕЛИ | 2007 |
|
RU2331079C1 |
| Измеритель нелинейного двухполюсника | 1982 |
|
SU1173343A1 |
| DE 10012503 A1, 19.10.2000 | |||
| Очистной узкозахватный комбайн | 1985 |
|
SU1257208A1 |

