Изобретение относится к системам самонаведения, в частности к системам самонаведения летательных аппаратов (ЛА) на наземные объекты с помощью радиолокационных средств, установленных на борту ЛА, использующих синтезирование апертуры (СА) антенны или доплеровское обужение луча (ДОЛ).
Специфической особенностью самонаведения в этом случае является формирование криволинейной траектории полета ЛА в горизонтальной плоскости с таким расчетом, чтобы бортовой пеленг наземного объекта был отличен от нуля и изменялся по закону, обеспечивающему постоянное линейное разрешение РЛС поперек линии визирования:

где  - параметры РЛС, в частном случае:
- параметры РЛС, в частном случае:
где ϕгт - требуемое значение углового смещения вектора путевой скорости ЛА относительно линии визирования наземного объекта в горизонтальной плоскости;
Д - значение дальности от наводимого ЛА до наземного объекта;
V - значение путевой скорости наводимого ЛА;
λ - длина волны бортовой РЛС;
ΔF - полоса пропускания доплеровского фильтра бортовой РЛС;
Δlт - значение требуемого линейного разрешения в горизонтальной плоскости.
Известно несколько способов наведения ЛА на наземные объекты, из них наиболее близким техническим решением - прототипом является способ пропорционального наведения летательных аппаратов на наземные объекты (см. патент РФ №2148235, МПК7 F 41 G 7/22), который заключается в измерении скорости сближения наводимого ЛА и наземного объекта, угловой скорости линии визирования наземного объекта в горизонтальной плоскости, а также поперечного ускорения наводимого ЛА в горизонтальной плоскости и формировании сигнала управления в горизонтальной плоскости по соотношению

где N0 - постоянный коэффициент, называемый навигационным параметром;
 - значение скорости сближения наводимого ЛА с наземным объектом;
- значение скорости сближения наводимого ЛА с наземным объектом;
ωг - значение угловой скорости линии визирования в горизонтальной плоскости;
Δωгтр - значение требуемого приращения угловой скорости линии визирования в горизонтальной плоскости, называемое требуемым смещением;
jг - значение поперечного ускорения наводимого ЛА в горизонтальной плоскости.
Навигационный параметр N0 учитывает дальности начала Д0и конца Дк наведения:
а требуемое смещение "Δωгтр" рассчитывают из условия обеспечения стабилизации требуемого линейного разрешения в горизонтальной плоскости:
где Куст - коэффициент, определяющий точность наведения и стабилизацию линейного разрешения в горизонтальной плоскости;
обозначения остальных параметров те же, что и в выражении (1).
Недостатком известного способа является то, что в нем отсутствует контроль степени соответствия истинного значения бортового пеленга наземного объекта в горизонтальной плоскости его требуемому значению, определяющему заданную величину поперечного линейного разрешения бортовой радиолокационной станции (БРЛС). Это приводит к потере информации о степени соответствия реальной траектории полета ЛА требуемой траектории и к невозможности ее текущей коррекции в горизонтальной плоскости, что приводит к снижению качества стабилизации величины линейного разрешения БРЛС в горизонтальной плоскости.
Задачей настоящего изобретения является разработка способа пропорционального наведения летательных аппаратов на наземные объекты, обеспечивающего повышение качества стабилизации величины линейного разрешения в горизонтальной плоскости БРЛС с синтезированием апертуры антенны или доплеровским обужением луча путем непрерывного контроля посредством БРЛС степени соответствия текущей траектории ЛА в горизонтальной плоскости требуемой и ее необходимой коррекции при сохранении высокой точности наведения, высокой экономичности процесса управления и адаптации к дальности начала наведения.
Поставленная задача достигается тем, что в способе пропорционального наведения летательных аппаратов на наземные объекты, заключающемся в том, что измеряют значения поперечного ускорения наводимого летательного аппарата (ЛА) в горизонтальной плоскости, в отличие от прототипа, измеряют значения углового отклонения вектора путевой скорости ЛА от линии визирования наземного объекта, значения дальности от наводимого ЛА до наземного объекта, значения скорости наводимого ЛА, формируют сигнал управления в горизонтальной плоскости в виде разности требуемой угловой скорости условной точки наведения, умноженной на адаптивный навигационный параметр, и поперечного ускорения наводимого ЛА в горизонтальной плоскости, адаптивный навигационный параметр формируют в зависимости от разности текущего значения углового отклонения вектора путевой скорости ЛА от линии визирования наземного объекта в горизонтальной плоскости и требуемого углового смещения условной точки наведения в горизонтальной плоскости относительно линии визирования наземного объекта с учетом коэффициентов, определяющих точность, экономичность наведения и адаптацию к дальности начала наведения.
Предлагаемый способ наведения осуществляет следующий алгоритм траекторного управления в горизонтальной плоскости:

где ΔГ - сигнал управления в горизонтальной плоскости;
ϕГ - значение угла между вектором путевой скорости ЛА и линией визирования наземного объекта в горизонтальной плоскости;
jГ - значение поперечного ускорения наводимого ЛА в горизонтальной плоскости;
ϕГТ - требуемое угловое смещение условной точки наведения относительно линии визирования наземного объекта в горизонтальной плоскости, которое рассчитывают по соотношению (1);
 - требуемая угловая скорость линии визирования условной точки наведения в горизонтальной плоскости, которую рассчитывают по соотношению:
- требуемая угловая скорость линии визирования условной точки наведения в горизонтальной плоскости, которую рассчитывают по соотношению:
К1, К2 - коэффициенты, определяющие точность отслеживания ЛА требуемого углового смещения и требуемой угловой скорости линии визирования условной точки наведения, экономичность наведения и адаптацию к дальности начала наведения, которые рассчитывают по соотношениям

где D и D - значения дальности от наводимого ЛА до наземного объекта и скорости ее изменения соответственно;
qϕ - штраф за точность управления по угловой координате;
qω - штраф за точность управления по угловой скорости;
κj - штраф за значение бокового ускорения ЛА.
Содержание штрафов qϕ, qω и κj раскрыто в книге: В.И.Меркулов, В.Н.Лепин. "Авиационные системы радиоуправления", М.: Радио и связь, 1997, стр.188-192. Методика их выбора - в том же источнике, стр.69-72, а пример использования методики - в том же источнике, стр.285-289.
На чертеже приведена упрощенная структурная схема возможного варианта системы наведения ЛА на наземные объекты, реализующей предлагаемый способ наведения, где:
1 - антенная система БРЛС;
2 - приемник/передатчик БРЛС;
3 - угломер БРЛС;
4 - вычислитель сигнала управления;
5 - система управления;
6 - летательный аппарат;
7 - автоматический селектор дальности и скорости сближения БРЛС;
8 - вычислитель требуемого углового смещения линии визирования условной точки наведения;
9 - акселерометр;
10 - измеритель путевой скорости летательного аппарата;
11 - вычислитель требуемой угловой скорости линии визирования условной точки наведения в горизонтальной плоскости.
Принцип работы приведенного варианта системы наведения заключается в следующем.
С помощью приемника/передатчика 2 и антенной системы 1 бортовой когерентной РЛС осуществляют облучение наземного объекта зондирующим сигналом, прием отраженного сигнала, его пространственную селекцию и оптимальную фильтрацию. С выхода приемника 2 сигнал поступает на входы угломера 3, автоматического селектора дальности и скорости сближения 7, измерителя скорости 10 наводимого ЛА.
В селекторе 7 по времени запаздывания отраженного сигнала измеряют дальность до наземного объекта и путем дифференцирования текущей дальности вычисляют скорость сближения с ним ЛА. В измерителе скорости 10 путем измерения доплеровского смещения частоты отраженного от подстилающей поверхности сигнала определяют путевую скорость наводимого ЛА, а в угломере 3 посредством узкополосной доплеровской фильтрации, на основании значений путевой скорости и углового положения луча антенны определяют значения угла между вектором путевой скорости ЛА и линией визирования наземного объекта в горизонтальной плоскости.
В вычислителе 8 по соотношению (1) формируют требуемые значения углового смещения линии визирования условной точки наведения в горизонтальной плоскости, а в вычислителе 11 путем дифференцирования из полученных значений углового смещения по соотношению (6) формируют значения требуемой угловой скорости линии визирования условной точки наведения. При помощи акселерометра 9 измеряют собственное поперечное ускорение ЛА в горизонтальной плоскости.
В вычислитель сигнала управления 4 поступают значения угла между вектором путевой скорости ЛА и линией визирования наземного объекта и скорости сближения с ним, значения требуемого угла смещения и угловой скорости линии визирования условной точки наведения, значения поперечного ускорения ЛА в горизонтальной плоскости. На основании измеренных и сформированных значений указанных параметров вычислитель 4 по соотношению (5) определяет сигнал управления в горизонтальной плоскости. В системе управления 5 происходит преобразование сформированного сигнала управления в соответствующие управляющие воздействия, которые поступают на управляющие органы самого ЛА 6 и определяют направление его движения в горизонтальной плоскости.
Рассмотрим, как происходит формирование сигнала управления в горизонтальной плоскости при использовании заявляемого способа наведения в динамике.
В начале процесса управления, когда фактический угол между вектором путевой скорости ЛА и линией визирования наземного объекта в горизонтальной плоскости может сильно отличаться от требуемого, разность (ϕг-ϕгт) велика, наведение будет осуществляться по угловому рассогласованию. При этом знак угловой скорости линии визирования условной точки наведения, а значит и ЛА по отношению к линии визирования цели, может быть как положительным, так и отрицательным в зависимости от знака начальной разности (ϕг-ϕгт). После окончания отработки углового рассогласования (ϕг-ϕгт≈0) управление ЛА осуществляется по угловой скорости  с одновременным контролем выполнения равенства ϕГ=ϕГТ. При любом отклонении от требуемой траектории появляется сигнал углового рассогласования (ϕг-ϕгт) возвращающий ЛА на заданную в горизонтальной плоскости траекторию полета.
с одновременным контролем выполнения равенства ϕГ=ϕГТ. При любом отклонении от требуемой траектории появляется сигнал углового рассогласования (ϕг-ϕгт) возвращающий ЛА на заданную в горизонтальной плоскости траекторию полета.
Условная точка наведения в процессе полета ЛА стремится к наземному объекту, поэтому расчетная траектория проходит через наземный объект, обеспечивая наведение ЛА на него, а необходимый запас располагаемых перегрузок ЛА позволяет отрабатывать случайные угловые рассогласования на любом участке траектории, что создает высокую степень стабилизации заданного поперечного линейного разрешения БРЛС.
Для оценки работоспособности и эффективности предлагаемого способа наведения было проведено математическое моделирование системы наведения на наземный объект.
Результаты моделирования подтвердили работоспособность заявляемого способа пропорционального наведения ЛА на наземные объекты.
Предлагаемый способ наведения позволяет обеспечить на начальном участке наведения вывод ЛА на требуемую траекторию, обеспечивающую заданную величину линейного разрешения БРЛС в горизонтальной плоскости и последующую текущую коррекцию траектории полета ЛА, обеспечивающую высокое качество стабилизации линейного разрешения.
Выбор значений коэффициентов K1 и К2 по соотношениям (7) для заданного типа наводимого ЛА позволяет обеспечить требуемую точность стабилизации линейного разрешения и допустимые промах и затраты на управление ЛА.
Кроме того, предлагаемый способ наведения позволяет обеспечить требуемое разрешение и точность наведения ЛА при реальных ограничениях на величину угловой скорости линии визирования условной точки наведения и располагаемые поперечные перегрузки ЛА.
Технический результат от использования предлагаемого изобретения по сравнению с прототипом заключается в следующем. За счет введения текущей коррекции траектории по данным измерений БРЛС обеспечивается повышение качества стабилизации линейного разрешения в горизонтальной плоскости при использовании режимов СА или ДОЛ при одновременном сохранении высокой точности и экономичности наведения.
Использование заявляемого способа наведения ЛА на наземные объекты не налагает никаких дополнительных ограничений на элементную базу и не предъявляет никаких существенных требований к быстродействию и объему памяти вычислителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2003 |
|
RU2229671C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ НАВЕДЕНИЯ САМОЛЕТОВ НА НАЗЕМНЫЕ ЦЕЛИ | 2002 |
|
RU2210801C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К НАЗЕМНОМУ ОБЪЕКТУ | 2012 |
|
RU2521890C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2016 |
|
RU2664258C2 |
| СПОСОБ ИНДИВИДУАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ | 2020 |
|
RU2742626C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2021 |
|
RU2773672C1 |
Изобретение относится к системам для самонаведения летательных аппаратов (ЛА) с бортовыми радиолокационными станциями (БРЛС), использующими синтезирование апертуры антенны (СА) или доплеровское обужение луча (ДОЛ) на наземные объекты. Технический результат - повышение качества стабилизации линейного разрешения в горизонтальной плоскости при одновременном сохранении высокой точности и экономичности наведения ЛА на наземные объекты. Для этого измеряют значения поперечного ускорения наводимого ЛА в горизонтальной плоскости, измеряют значения угла между вектором путевой скорости ЛА и линией визирования наземного объекта, значения дальности от наводимого ЛА до наземного объекта, значения скорости наводимого ЛА. Формируют сигнал управления в горизонтальной плоскости в виде разности требуемой угловой скорости условной точки наведения, умноженной на адаптивный навигационный параметр, и поперечного ускорения наводимого ЛА в горизонтальной плоскости. При этом адаптивный навигационный параметр формируют в зависимости от разности текущего значения угла между вектором путевой скорости ЛА и линией визирования наземного объекта в горизонтальной плоскости и требуемого углового смещения условной точки наведения в горизонтальной плоскости относительно линии визирования наземного объекта с учетом коэффициентов, определяющих точность, экономичность наведения и адаптацию к дальности начала наведения. 1 ил.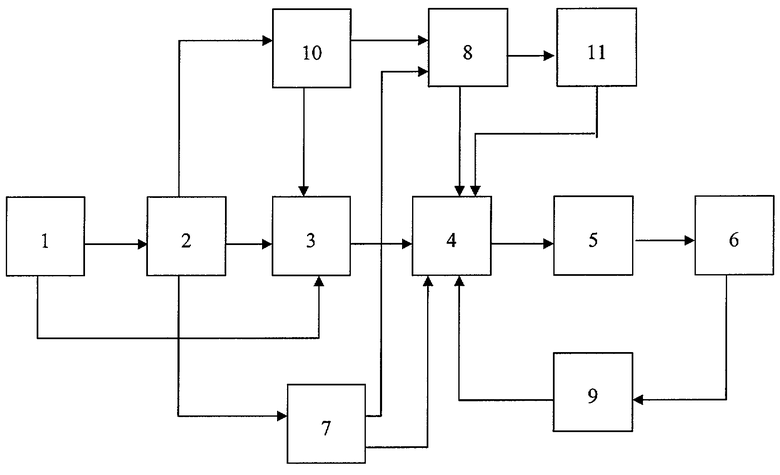
Способ пропорционального наведения летательных аппаратов на наземные объекты, заключающийся в том, что измеряют значения поперечного ускорения наводимого летательного аппарата (ЛА) в горизонтальной плоскости, отличающийся тем, что измеряют значения угла между вектором путевой скорости ЛА и линией визирования наземного объекта, значения дальности от наводимого ЛА до наземного объекта, значения скорости наводимого ЛА, формируют условную точку наведения с требуемым угловым смещением условной точки наведения относительно линии визирования наземного объекта в горизонтальной плоскости и требуемой угловой скоростью линии визирования условной точки наведения в горизонтальной плоскости и формируют сигнал управления в горизонтальной плоскости по соотношению
где ΔГ - сигнал управления в горизонтальной плоскости;
ϕГ - значение угла между вектором путевой скорости ЛА и линией визирования наземного объекта в горизонтальной плоскости;
jг - значение поперечного ускорения наводимого ЛА в горизонтальной плоскости;
ϕГТ - требуемое угловое смещение условной точки наведения относительно линии визирования наземного объекта в горизонтальной плоскости;
 - требуемая угловая скорость линии визирования условной точки наведения в горизонтальной плоскости, которую рассчитывают по соотношению
- требуемая угловая скорость линии визирования условной точки наведения в горизонтальной плоскости, которую рассчитывают по соотношению
К1, К2 - коэффициенты, определяющие точность отслеживания ЛА требуемого углового смещения и требуемой угловой скорости линии визирования условной точки наведения, экономичность наведения и адаптацию к дальности начала наведения, которые рассчитывают по соотношениям

где D и D - значения дальности от наводимого ЛА до наземного объекта и скорости ее изменения соответственно;
qϕ - штраф за точность управления по угловой координате;
qω - штраф за точность управления по угловой скорости;
κj - штраф за значение бокового ускорения ЛА.
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ НА ЦЕЛЬ | 1999 |
|
RU2148236C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОНАВОДЯЩИМСЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ | 1998 |
|
RU2146798C1 |
| СПОСОБ ПРОВЕДЕНИЯ СОСТЯЗАНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2261133C1 |
| US 4899955 А, 13.02.1990. | |||

