Текст описания в факсимильном виде (см. чертежи) Тж
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2003 |
|
RU2229671C1 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2004 |
|
RU2261411C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОТДЕЛЬНУЮ ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ ЦЕЛЕЙ | 2003 |
|
RU2253082C1 |
| СПОСОБ СКРЫТНОГО САМОНАВЕДЕНИЯ САМОЛЕТОВ НА ВОЗДУШНЫЕ ОБЪЕКТЫ | 2009 |
|
RU2408845C1 |
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА БЕСПИЛОТНОГО САМОЛЕТА-ИСТРЕБИТЕЛЯ | 2010 |
|
RU2418267C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |





Изобретение относится к системам наведения, в частности к системам самонаведения самолетов на наземные цели. Сущность изобретения заключается в том, что требуемые значения бортового пеленга и угловой скорости линии визирования цели в горизонтальной плоскости определяют по определенным соотношениям в зависимости от режима работы бортовой радиолокационной системы (БРЛС) от момента обнаружения цели до применения средств поражения. Сигнал управления в горизонтальной плоскости формируют в виде алгебраической суммы значения поперечного ускорения наводимого самолета и взвешенных на соответствующие коэффициенты усиления значений ошибок наведения по бортовому пеленгу и угловой скорости линии визирования в горизонтальной плоскости по приведенному в формуле изобретения закону. Реализация изобретения позволяет использовать один закон управления самолетом, обеспечивающий вывод самолета в точку, расположенную на заданной дальности, под заданным бортовым пеленгом и с требуемым значением угловой скорости линии визирования цели, что позволяет применять разнообразные средства поражения при любом режиме работы БРЛС. Кроме того, обеспечивается требуемая линейная разрешающая способность, точность наведения, экономичность и хорошее сопряжение различных режимов работы БРЛС. 14 ил.
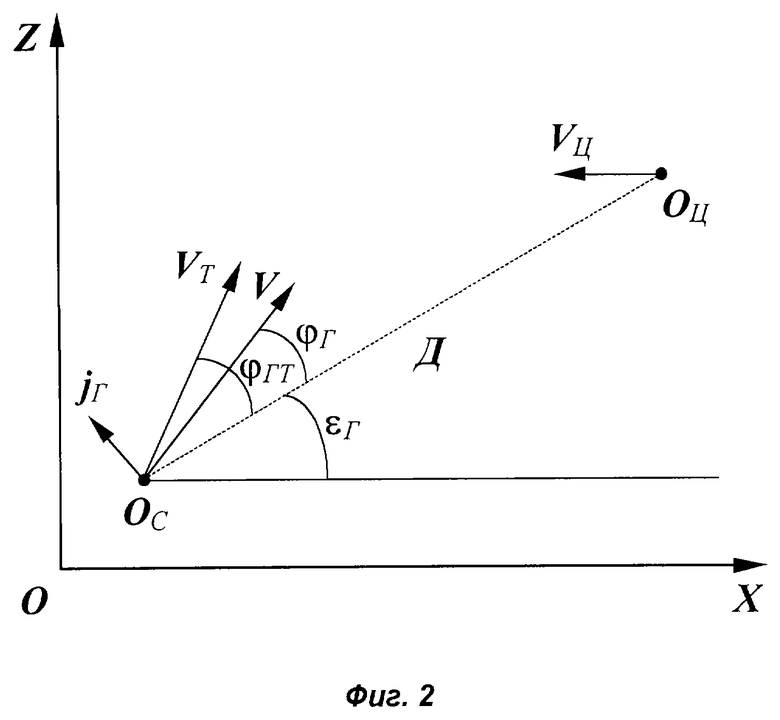
Универсальный способ наведения самолетов на наземные цели, заключающийся в том, что одновременно измеряют значения бортового пеленга наземной цели, угловой скорости линии визирования цели в горизонтальной плоскости, дальности от наводимого самолета до наземной цели и скорости их сближения, путевой скорости и угла сноса наводимого самолета, а также поперечного ускорения наводимого самолета в горизонтальной плоскости, потом определяют требуемые значения бортового пеленга и угловой скорости линии визирования цели в горизонтальной плоскости, отличающийся тем, что требуемые значения бортового пеленга и угловой скорости линии визирования цели в горизонтальной плоскости определяют по нижеприведенным соотношениям в зависимости от режима работы бортовой радиолокационной системы (БРЛС) от момента обнаружения цели до применения средств поражения, и формируют сигнал управления в горизонтальной плоскости в виде алгебраической суммы значения поперечного ускорения наводимого самолета и взвешенных на соответствующие коэффициенты усиления значений ошибок наведения по бортовому пеленгу и угловой скорости линии визирования в горизонтальной плоскости по закону
в котором Δг - сигнал управления самолетом в горизонтальной плоскости;
qϕг, qωг - коэффициенты, определяющие точность наведения по бортовому пеленгу и угловой скорости линии визирования цели в горизонтальной плоскости;
kjг - коэффициент, определяющий экономичность наведения в горизонтальной плоскости;
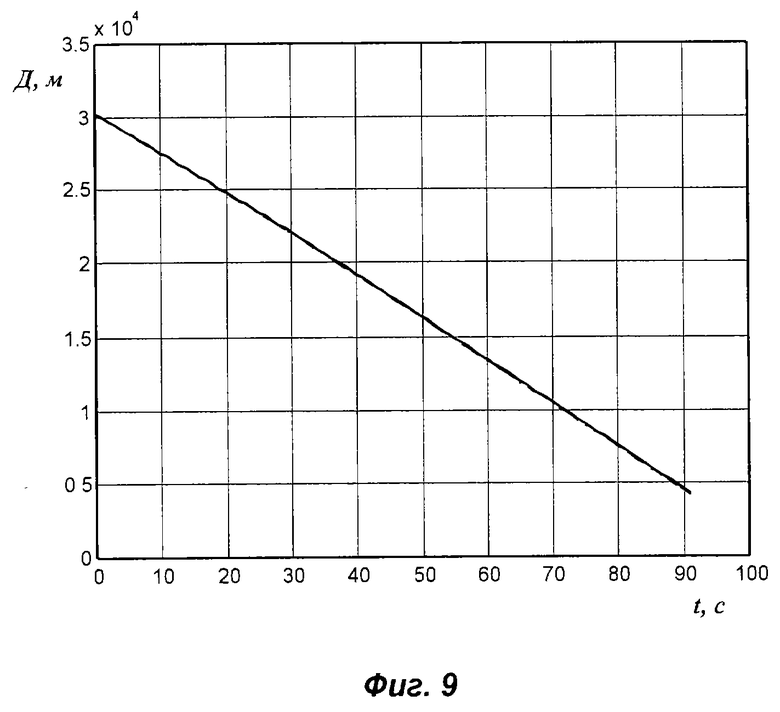
Д - значение дальности от наводимого самолета до наземной цели;
VСБ - значение скорости сближения наводимого самолета с наземной целью;
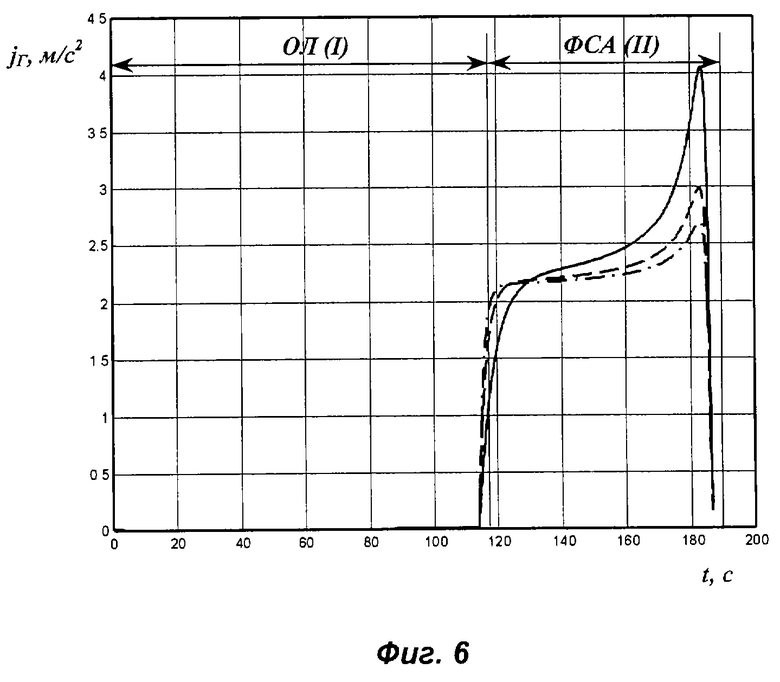
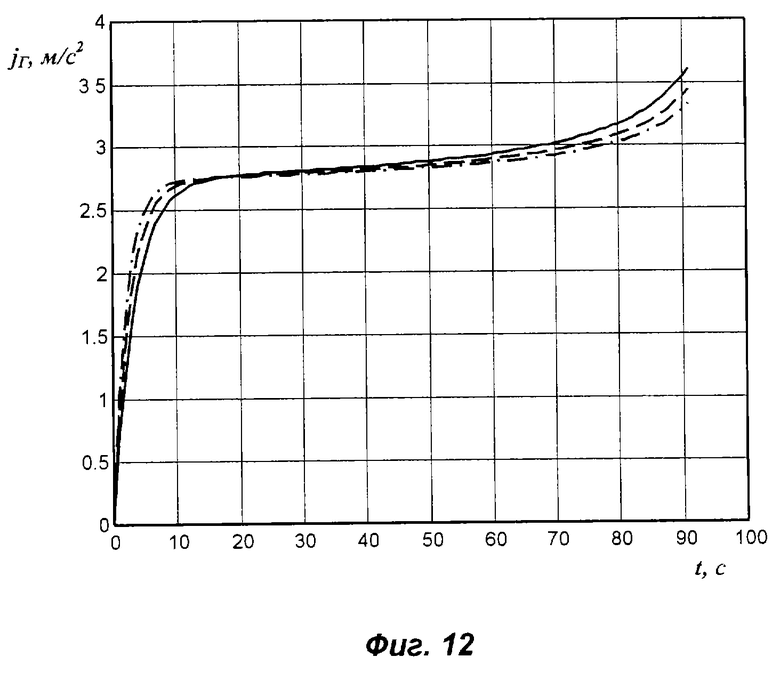
jГ - значение поперечного ускорения наводимого самолета в горизонтальной плоскости;
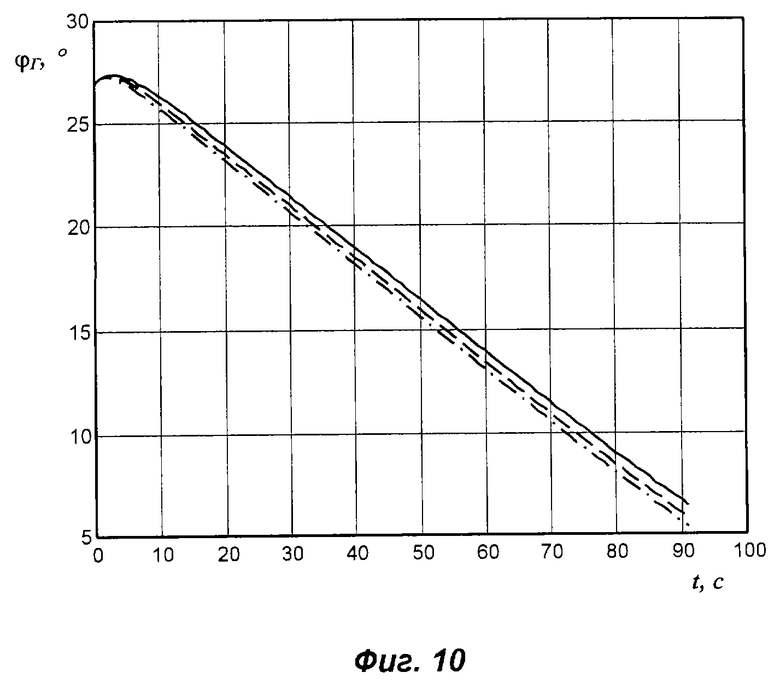
ϕг - значение бортового пеленга цели в горизонтальной плоскости;
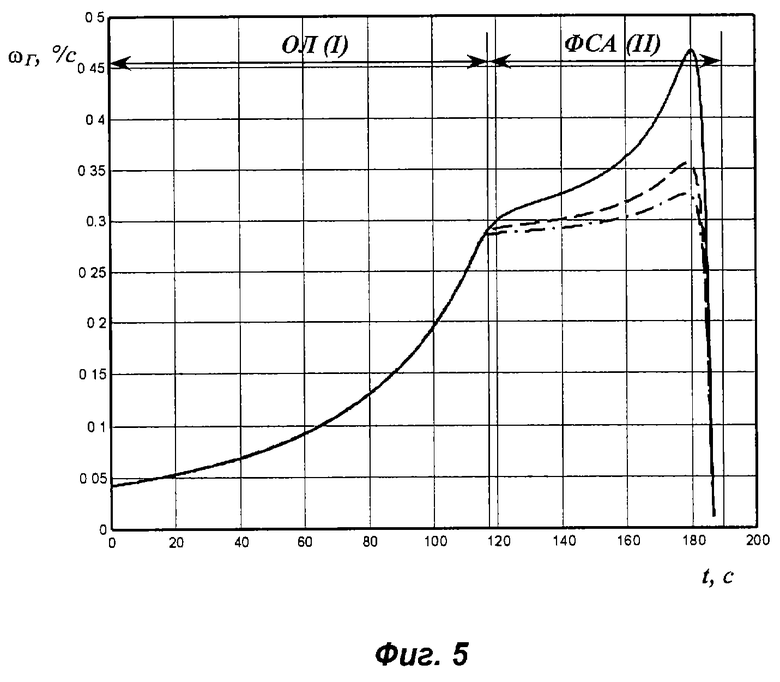
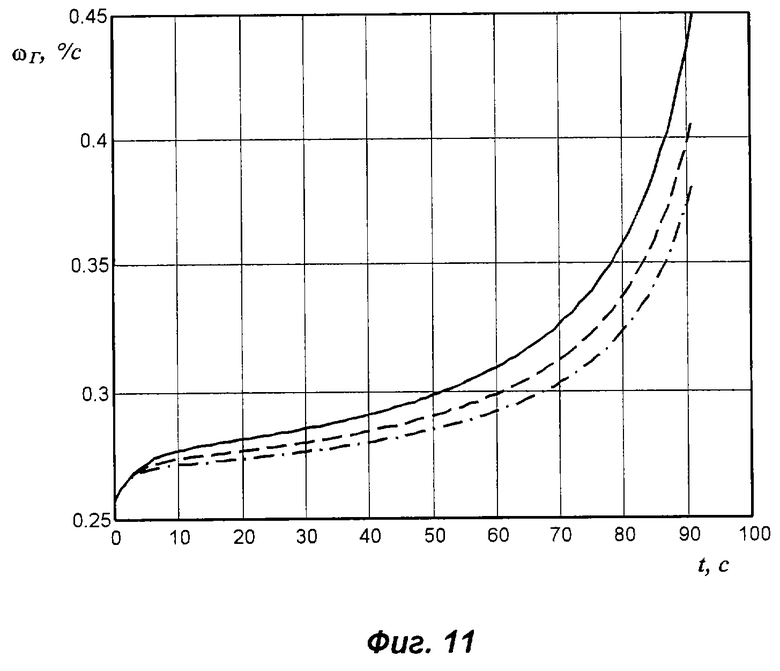
ωг - значение угловой скорости линии визирования цели в горизонтальной плоскости;
ϕгт - требуемые значения бортового пеленга цели в горизонтальной плоскости, зависящие от режимов работы БРЛС;
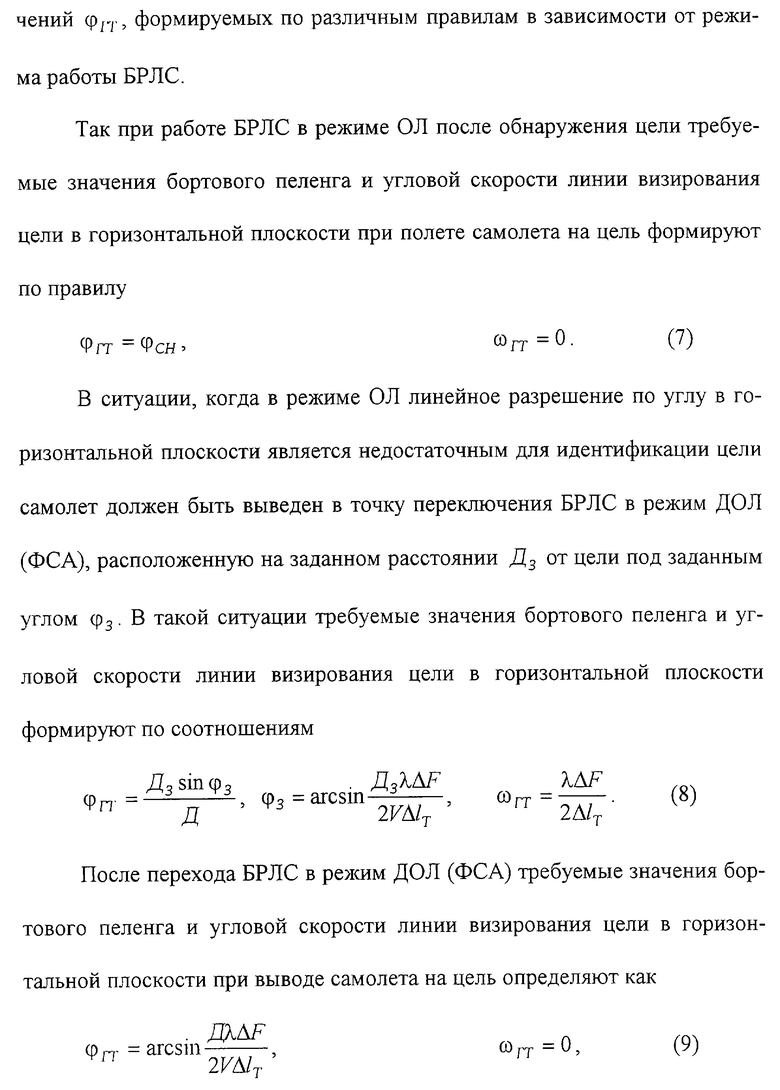
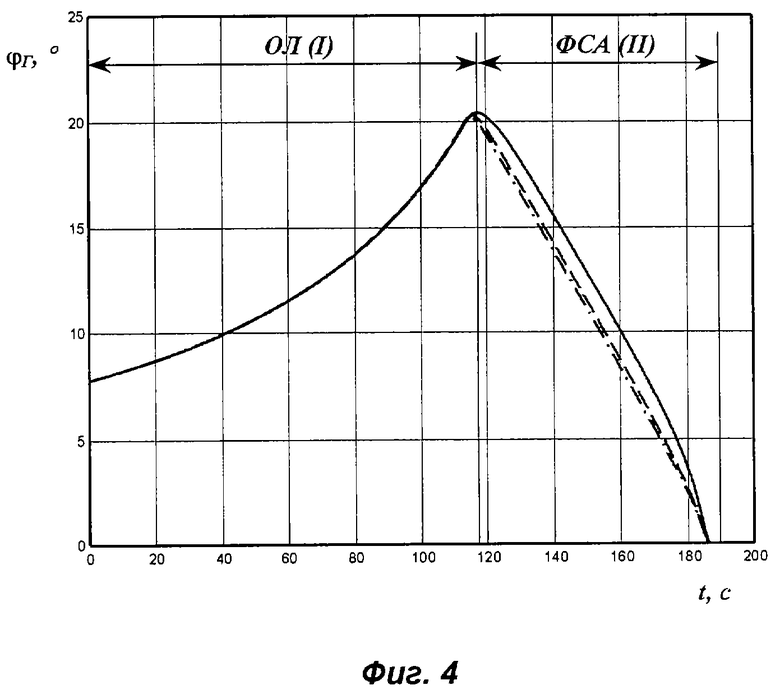
ωгт - требуемые значения угловой скорости линии визирования цели в горизонтальной плоскости, зависящие от режимов работы БРЛС и типа применяемого средства поражения, причем в режиме обычного луча (ОЛ) требуемые значения бортового пеленга и угловой скорости линии визирования цели в горизонтальной плоскости при выводе самолета на цель определяют как
ϕгт = ϕсн, ωгт = 0,
а при выводе самолета в точку переключения бортовой радиолокационной системы (БРЛС) в режим доплеровского "обужения" луча (ДОЛ), либо фокусированного синтезирования апертуры (ФСА) антенны - как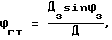

далее в режиме ДОЛ (ФСА) при выводе самолета на цель - как
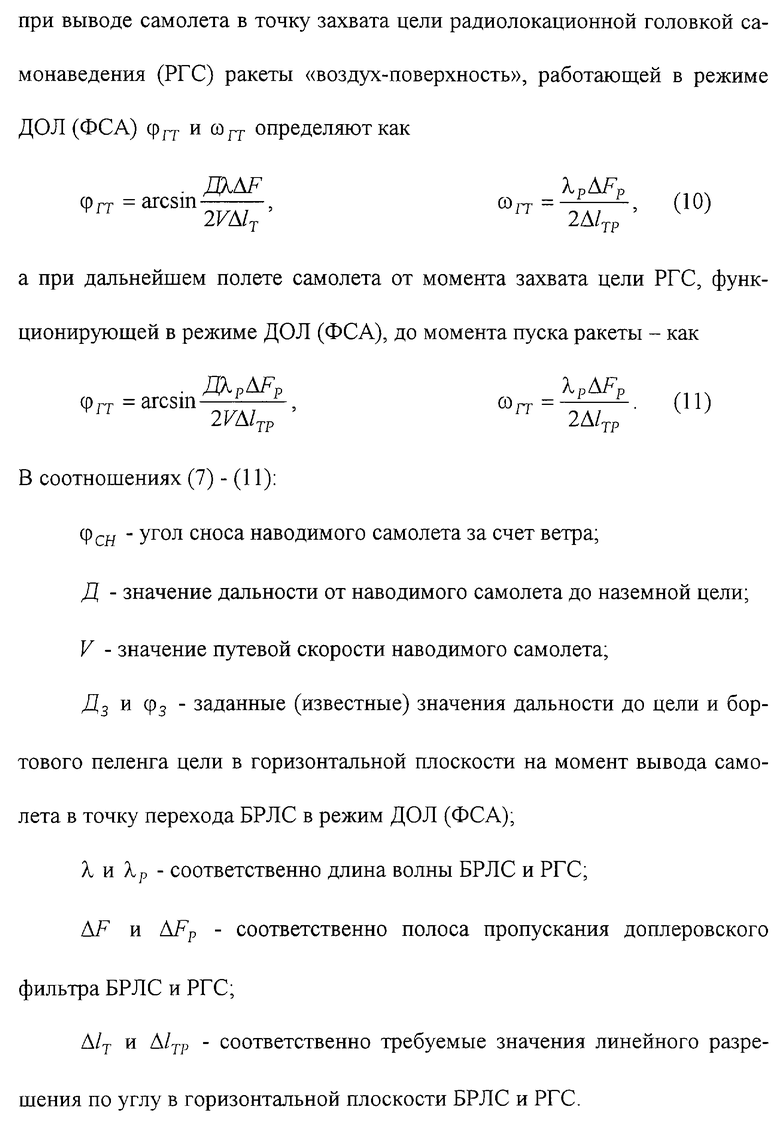
при выводе самолета в точку захвата цели радиолокационной головкой самонаведения (РГС) ракеты, функционирующей в режиме ДОЛ (ФСА), - как
а при дальнейшем полете самолета от момента захвата цели РГС, функционирующей в режиме ДОЛ (ФСА), до момента пуска ракеты - как
где ϕcн - угол сноса наводимого самолета за счет ветра;
Д - значение дальности от наводимого самолета до наземной цели;
V - значение путевой скорости наводимого самолета;
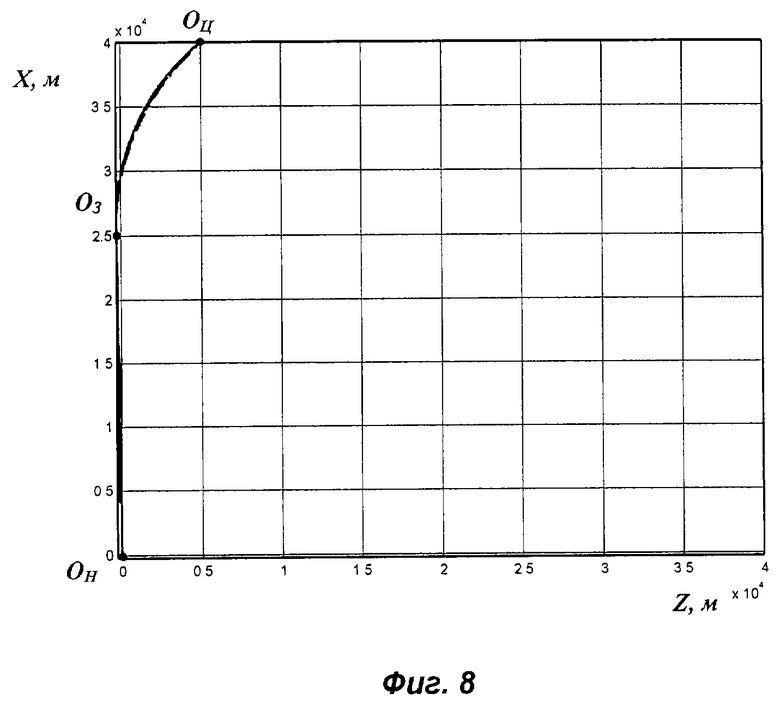
Дз и ϕз - значения дальности до цели и бортового пеленга цели в горизонтальной плоскости на момент вывода самолета в точку перехода БРЛС в режим ДОЛ (ФСА);
λ - длина волны БРЛС;
λp - длина волны РГС;
ΔF - полоса пропускания доплеровского фильтра БРЛС:
ΔFp - полоса пропускания доплеровского фильтра РГС;
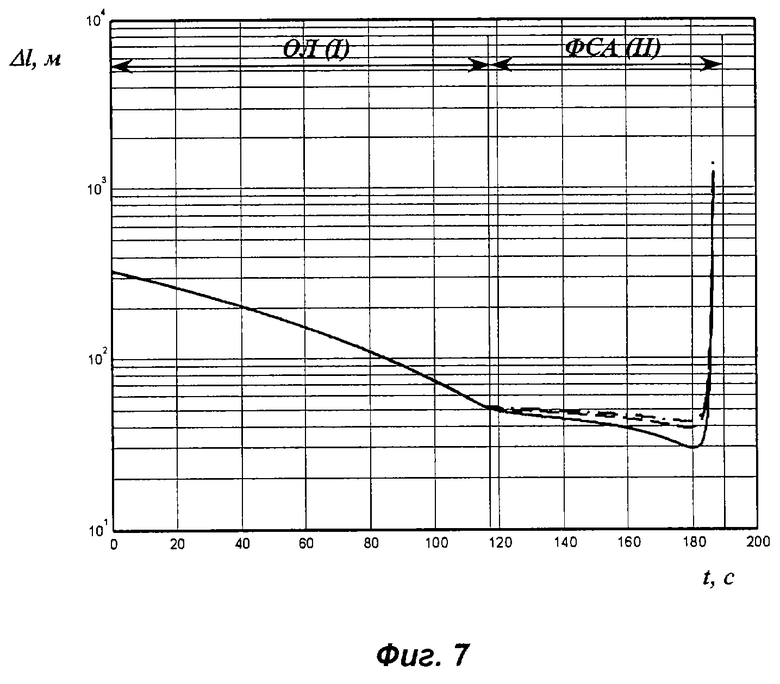
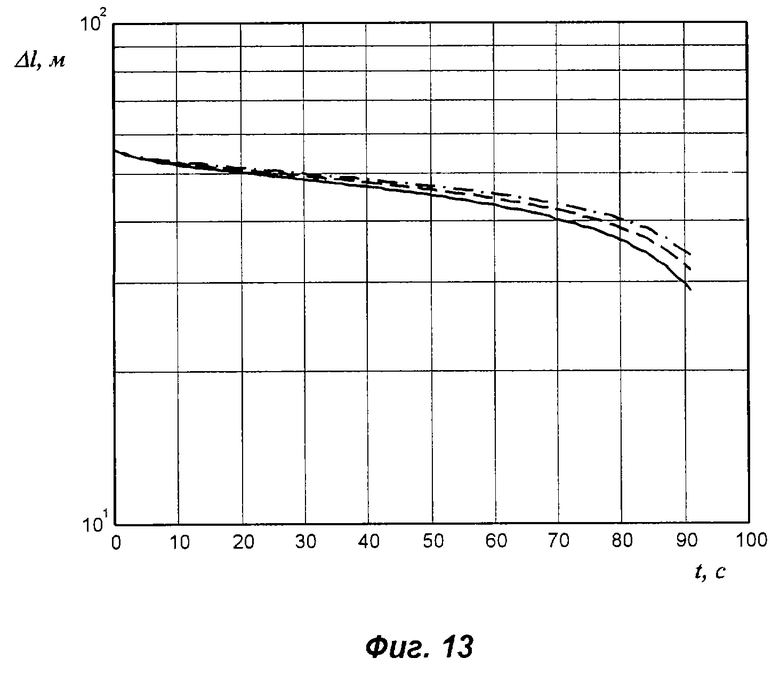
Δlт - требуемое значение линейного разрешения по углу в горизонтальной плоскости БРЛС;
Δlтр - требуемое значение линейного разрешения по углу в горизонтальной плоскости РГС.
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ САМОНАВОДЯЩЕЙСЯ РАКЕТЫ КЛАССА ВОЗДУХ - ПОВЕРХНОСТЬ | 1997 |
|
RU2111439C1 |
| СПОСОБ ПРОВЕДЕНИЯ СОСТЯЗАНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2261133C1 |
| US 4898341, 06.02.1990 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |

