Изобретение относится к радиоэлектронике, к системам с использованием сигналов с расширенным спектром и может быть использовано в приемниках навигационных сигналов GPS, ГЛОНАСС и Галилео.
Известен способ поиска навигационных сигналов в частотно-временной области, включающий в себя вычисление быстрого преобразования Фурье (БПФ) по N комплексным отсчетам, представляющим собой результат когерентного интегрирования на интервале τн корреляции принимаемого сигнала и сформированной реплики. Интервал когерентного интегрирования определяет полосу отдельной частотной ячейки, имеющей форму колокола [1].
Такой способ поиска навигационных сигналов имеет существенное ограничение в ширине полосы разрешения по частоте из-за ограничения в длительности интервала когерентного накопления входного сигнала, которое, в свою очередь, обусловлено незнанием границ символов принимаемой навигационной информации и их значений.
Известен способ поиска навигационных сигналов, включающий формирование комплексных отсчетов, каждый из которых есть результат корреляции принимаемого сигнала и реплики на временном интервале, соответствующем области неопределенности по частоте, запоминание указанных отсчетов на интервале, соответствующем длительности нескольких символов цифровой информации и определяющем полосу разрешения по частоте, выполнение быстрого преобразования Фурье для всех комбинаций информационных символов, в том числе и при повторении этих комбинаций при сдвигах в пределах неопределенности границ информационных символов, а также для анализируемых позиций по задержке, некогерентного суммирования и выделения из всех комбинаций одной, имеющей максимальное значение накопленного сигнала [2].
Этому способу поиска навигационных сигналов, наиболее близкому к предложенному, присущи следующие недостатки:
- последовательное соединение операции когерентного интегрирования принимаемого сигнала на интервале τн, где τн определяется шириной зоны неопределенности по частоте ΔFразр и БПФ с полосой разрешения ΔFразр, приводит к ухудшению энергетических характеристик на краях частотного спектра БПФ;
- при некогерентном суммировании объем требуемой памяти увеличивается из-за того, что поиск максимума проводится по всем возможным комбинациям информационных символов;
- при выделении максимально вероятной последовательности не учитывается возможная корреляция сигналов при единичных сдвигах по задержке, частоте, а также сдвигов границ информационных символов.
Предлагаемым изобретением решается задача повышения эффективности поиска принимаемого сигнала по частоте и задержке, а также сокращения требуемого объема памяти при некогерентном накоплении.
Для достижения этого результата в способ поиска навигационных сигналов, включающий формирование комплексных отсчетов, каждый из которых есть результат корреляции принимаемого сигнала и реплики на временном интервале, соответствующем области неопределенности по частоте, запоминание указанных отсчетов на интервале, соответствующем длительности нескольких символов цифровой информации и определяющем полосу разрешения по частоте, выполнение быстрого преобразования Фурье для всех комбинаций информационных символов, в том числе и при повторении этих комбинаций при сдвигах в пределах неопределенности границ информационных символов, а также для анализируемых позиций по задержке, некогерентного суммирования и выделения из всех комбинаций одной, имеющей максимальное значение накопленного сигнала, вводят перенос по частоте всех комбинаций последовательностей сигнала на новые частоты, сдвинутые относительно исходной срединной частоты интервала неопределенности вверх и вниз на четверть интервала неопределенности, при этом для дальнейшей обработки из всех спектральных компонент на выходе быстрого преобразования Фурье берут половину спектральных компонент, примыкающих к сдвинутым частотам, по каждой спектральной компоненте проводят отбор максимального значения сигнала из всех сигналов, соответствующих всем возможным комбинациям информационных символов, из отобранных сигналов формируют таблицу, из которой с учетом корреляции сигналов в соседних ячейках определяют наиболее вероятную комбинацию по частоте и задержке принимаемого сигнала и фазе символа цифровой информации, а также уточняют значения частоты и задержки.
Признаки, отличающие предлагаемый способ поиска навигационного сигнала от наиболее близкого к нему, известного по публикации [2], характеризуют операции переноса по частоте всех комбинаций сигнала на новые срединные частоты, использования n/2 примыкающих к новым срединным частотам спектральных составляющих, отбора перед некогерентным суммированием максимальных по всем комбинациям сигнала значений и формирования таблицы, из которой с учетом корреляции сигналов в соседних ячейках выделяют наиболее вероятную комбинацию по частоте и задержке принимаемого сигнала и фазе символа цифровой информации, а также уточняют значения частоты и задержки.
На фиг.1 приведена блок-схема устройства, реализующего предлагаемый способ поиска навигационного сигнала. Устройство содержит квадратурный коррелятор (1), формирователь реплик сигнала (2), память на (n+w-1) отсчетов (3), перемножители (4), первый коммутатор (5), линию задержки (6), формирователь комбинаций информационных символов (7), второй коммутатор (8), комплексные перемножители (9), третий коммутатор (10), быстрый преобразователь Фурье (БПФ) (11), выделитель максимума (12), четвертый коммутатор (13), сумматор с обратной связью (14), таблица (15).
Способ поиска навигационных сигналов реализуется следующим образом. Входной сигнал, преобразованный к срединной частоте f0 интервала поиска по частоте Δfn в квадратурных корреляторах (1), перемножается с репликой сигнала, получаемой с выхода формирователя реплик сигнала (2). Число различных реплик равно «k», реплики отличаются сдвигом по задержке. Шаг сдвига равен Δ (в долях символа ПСП) и общий анализируемый интервал по задержке составляет k·Δ. В квадратурных корреляторах (1) производят интегрирование в пределах ε1÷τu+ε1, где ε1=l·Δ, l∈0÷k-1, произведения входного сигнала и реплики сигнала. Интервал интегрирования τu определяют шириной диапазона поиска по частоте Δfn,  . Результаты интегрирования, представляющие собой комплексные отсчеты ul,t, заносят в память (3). Число комплексных отсчетов для каждой фиксированной задержки, l·Δ, составляет (n+m-1), где n определяет длительность интервала когерентного накопления и соответственно ширину полосы разрешения ΔFpaзp на выходе БПФ,
. Результаты интегрирования, представляющие собой комплексные отсчеты ul,t, заносят в память (3). Число комплексных отсчетов для каждой фиксированной задержки, l·Δ, составляет (n+m-1), где n определяет длительность интервала когерентного накопления и соответственно ширину полосы разрешения ΔFpaзp на выходе БПФ,  , a «m» - число комплексных отсчетов на длительности информационного символа τc,
, a «m» - число комплексных отсчетов на длительности информационного символа τc,  .
.
Таким образом, на интервале когерентного накопления располагаются  информационных символов. Как правило, значения «n» и «m» выбирают кратными, и отношение обычно находится в пределах 3÷6.
информационных символов. Как правило, значения «n» и «m» выбирают кратными, и отношение обычно находится в пределах 3÷6.
При поиске навигационных сигналов априори неизвестно значение информационных символов, модулирующих навигационный сигнал, а также границ этих символов. Полноценное когерентное накопление на интервале n·τи с минимумом энергетических потерь возможно при «угадывании» передаваемых информационных символов и их границ. Такое «угадывание» осуществляется путем перебора всех возможных вариантов расположения информационных символов. С учетом того, что при дальнейшей обработке сигнала не имеет значения, взяты ли символы в прямом или инверсном виде, общее число анализируемых комбинаций составит:

Указанная комбинаторика реализуется путем формирования  комбинаций в формирователе комбинаций информационных символов (7) и размножения указанных комбинаций путем введения задержек
комбинаций в формирователе комбинаций информационных символов (7) и размножения указанных комбинаций путем введения задержек  . Последовательность проверки всех комбинаций реализуется первым коммутатором (5), с выхода которого информационная последовательность поступает на перемножители (4), на которых осуществляется снятие модуляции с последовательности комплексных отсчетов ul,t с «k» выходов памяти (3). Таким образом, общее количество комбинаций анализируемых последовательностей равно
. Последовательность проверки всех комбинаций реализуется первым коммутатором (5), с выхода которого информационная последовательность поступает на перемножители (4), на которых осуществляется снятие модуляции с последовательности комплексных отсчетов ul,t с «k» выходов памяти (3). Таким образом, общее количество комбинаций анализируемых последовательностей равно
Второй коммутатор (8) обеспечивает последовательность дальнейшей обработки по «k» задержкам в квадратурных корреляторах (1). По каждой отдельной последовательности из «n» комплексных отсчетов проводят преобразование с помощью БПФ (11) из временной области в частотную для дальнейшего анализа спектрального состава сигнала.
Так как последовательность комплексных отсчетов формируется на выходе коррелятора (1), который имеет частотную характеристику для спектральной плотности мощности
изображенную на фиг.2а, то при анализе частот, отстоящих от f0 на величину, близкую к  будет фиксироваться уменьшение спектральной мощности, что на выходе БПФ приведет к неравнозначности сравнения спектральных компонент. По результатам моделирования это эквивалентно энергетическим потерям порядка 3,9 дБ.
будет фиксироваться уменьшение спектральной мощности, что на выходе БПФ приведет к неравнозначности сравнения спектральных компонент. По результатам моделирования это эквивалентно энергетическим потерям порядка 3,9 дБ.
Уменьшить потери можно, уменьшая интервал интегрирования, например, вдвое. Но это приведет к увеличению последовательности комплексных отсчетов вдвое, а также к увеличению размерности БПФ, что эквивалентно увеличению вдвое памяти (3) и более чем в два раза усложнению БПФ. Во многих приложениях это неприемлемо.
Эта проблема решается за счет применения последовательного гетеродинирования спектра сигнала на  и выделения тех участков спектра, которые примыкают к новым срединным частотам
и выделения тех участков спектра, которые примыкают к новым срединным частотам  и
и  , как показано на фиг.2б. То есть при переносе спектра комбинаций последовательностей на срединную частоту
, как показано на фиг.2б. То есть при переносе спектра комбинаций последовательностей на срединную частоту  из всех спектральных компонент на выходе БПФ (11) для дальнейшей обработки берут спектральные компоненты, находящиеся в пределах
из всех спектральных компонент на выходе БПФ (11) для дальнейшей обработки берут спектральные компоненты, находящиеся в пределах  , и, соответственно для срединной частоты
, и, соответственно для срединной частоты  берут спектральные компоненты, находящиеся в пределах
берут спектральные компоненты, находящиеся в пределах  . Как показывает моделирование, это позволяет улучшить энергетические характеристики при поиске навигационных сигналов на 2,9 дБ. Перенос спектра сигнала с выхода второго коммутатора (8) на частоты
. Как показывает моделирование, это позволяет улучшить энергетические характеристики при поиске навигационных сигналов на 2,9 дБ. Перенос спектра сигнала с выхода второго коммутатора (8) на частоты  производится в 4 комплексном перемножителе (9), на который поочередно подают частоты смещения
производится в 4 комплексном перемножителе (9), на который поочередно подают частоты смещения  и
и  .
.
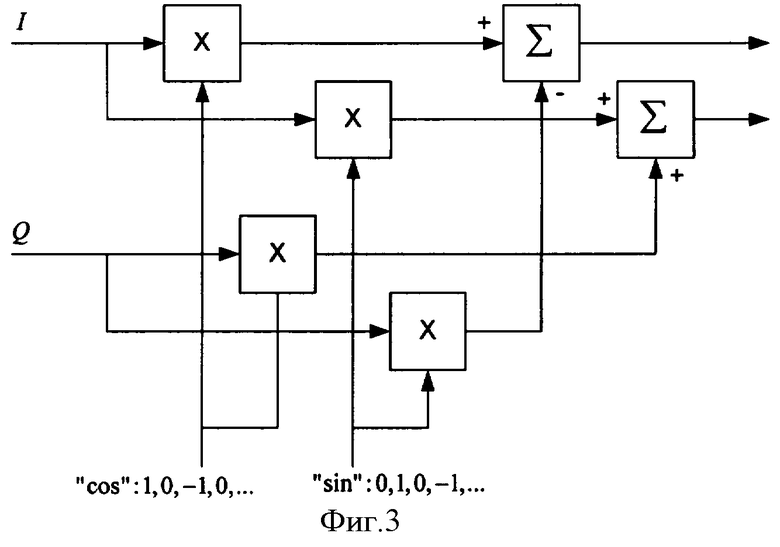
Комплексный перемножитель осуществляет перемножение входного комплексного сигнала
uil=Ai(cos2πf0t+jsin2πf0t),
где Ai - последовательность отсчетов, на сигнал с частотой смещения :

Результирующий сигнал имеет вид:
Заменяя время t на дискретную последовательность
t=i·τu
и учитывая, что

получим, что значения  ,
,  .
.
В результате структуру комплексного перемножителя можно привести к виду:


Блок-схема комплексного перемножителя приведена на фиг.3.
Процедура обработки запомненных в памяти (3) отсчетов состоит из следующих операций:
1) для фиксированной последовательности на выходе БПФ (11) отбирают n/2 спектральных отчетов, которые поступают на соответствующие каждому спектральному отсчету выделители максимума (12). Не изменяя установку по сдвигу частоты, l-ю последовательность перемножают со всеми возможными комбинациями информационных символов. Максимальные значения сигналов по каждой спектральной компоненте отбирают на выделителях максимума (12) и через четвертый коммутатор (13) подают на сумматор с обратной связью (14). После этого выделители максимума (12) обнуляют.
2) Повторяют операцию "1" «m» раз, варьируя возможные сдвиги границ информационных символов с помощью линии задержки (6) и коммутатора (5).
3) Повторяют операции "1" и "2" при другом сдвиге частоты на  .
.
4) Повторяют операции "1", "2" и "3" «k» раз для других сдвигов по задержке, которые формируются в блоках (1) и (2).
В результате выполнения операций "1"-"4" выделяют n·m·k величин, которые аккумулируют в сумматорах с обратной связью (14).
Сумматоры с обратной связью (14) осуществляют некогерентное накопление сигнала при повторении операций "1"-"4", но с другими запомненными в памяти (3) последовательностями входного сигнала. Число повторений NN определяется требуемым отношением сигнал/шум на выходе при заданном на входе. Выходы с (14) фактически образуют таблицу (15) с координатами по задержке «1», частоте «i» и сдвигу границ информационных символов «j». Определение глобального максимума в (15) сразу определяет положение сигнала в указанных трех координатах. Однако более вероятна ситуация, когда глобальный максимум не четко выражен, и искомый сигнал распределен по соседним ячейкам. В этом случае проводят интерполяцию, с помощью которой можно уточнить положение сигнала по соответствующей координате. Более того, наличие корреляции между ячейками позволяет отбраковывать ложные одиночные выбросы, если, конечно, они не превышают сумму коррелированных сигналов. Таким образом, формирование выходной таблицы позволяет улучшить опознание сигнала и повысить точность определения частотно-временных параметров сигнала.
Предлагаемый способ поиска навигационных сигналов повышает эффективность поиска принимаемого сигнала по частоте и задержке, а также сокращает требуемый объем памяти при некогерентном накоплении.
Литература
1. В.Shayevits, H.Cohen, J.Nir, E.Dochovny. Very Efficient High Sensitivity Fully Coherent AGPS Signal Processing with Almost No Assistance Requirements. ION GPS 2002, 24-27 September 2002.
2. Nesreen I. Ziedan. GNSS Receivers for Weak Signals, chapter 3.2, 3.3. ARTECH HOUSE, 2006.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ ПО ЧАСТОТЕ | 2006 |
|
RU2332793C1 |
| УСТРОЙСТВО ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2334357C1 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
| ПРИЕМНИК СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИГНАЛОВ С БЛОКОМ БЫСТРОГО И ВЫСОКОЧУВСТВИТЕЛЬНОГО ПОИСКА | 2010 |
|
RU2444027C2 |
| ЦИФРОВОЙ МОДЕМ КОМАНДНОЙ РАДИОЛИНИИ ЦМ КРЛ | 2013 |
|
RU2548173C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЫСТРОЙ СИНХРОНИЗАЦИИ В СИСТЕМАХ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1989 |
|
SU1841074A1 |
| ЦИФРОВОЙ КОРРЕЛЯТОР ПРИЕМНИКА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2006 |
|
RU2310212C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 1999 |
|
RU2157050C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ АВТОПОДСТРОЙКИ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 1999 |
|
RU2168267C2 |
Изобретение относится к радиоэлектронике, может быть использовано в приемниках навигационных сигналов GPS, ГЛОНАСС и Галилео. Технический результат способа заключается в повышении эффективности поиска принимаемого сигнала по частоте и задержке, а также сокращении требуемого объема памяти при некогерентном накоплении. Способ поиска навигационных сигналов включает формирование и запоминание комплексных отсчетов взаимнокорреляционной функции для нескольких анализируемых позиций по задержке, выполнение быстрого преобразования Фурье для всех комбинаций информационных символов, в том числе при сдвигах границ информационных символов, некогерентное суммирование и выделение одной комбинации, имеющей максимальное значение накопленного сигнала, производят перенос по частоте всех комбинаций последовательностей сигнала на новые частоты, сдвинутые относительно исходной срединной частоты интервала неопределенности вверх и вниз на четверть интервала неопределенности, из всех спектральных компонент на выходе быстрого преобразования Фурье берут половину спектральных компонент, примыкающих к сдвинутым частотам, по каждой спектральной компоненте проводят отбор максимального значения сигнала для всех комбинаций информационных символов, из отобранных сигналов формируют таблицу, по ней определяют наиболее вероятную комбинацию частоты, задержки и фазы символа цифровой информации принимаемого сигнала и уточняют значения частоты и задержки. 3 ил.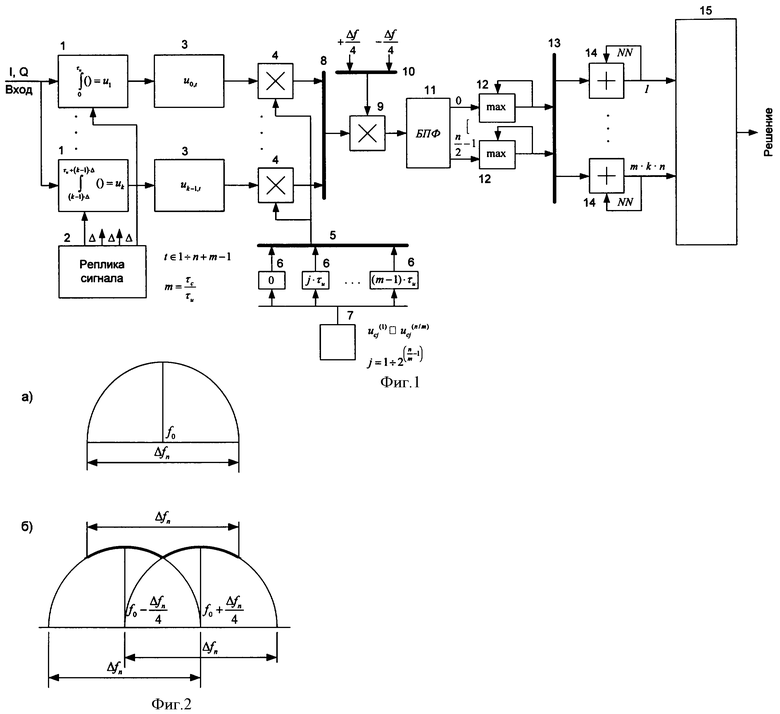
Способ поиска навигационных сигналов, включающий формирование комплексных отсчетов, каждый из которых есть результат корреляции принимаемого и символов ПСП на временном интервале, соответствующем области неопределенности по частоте, запоминание указанных отсчетов на интервале, соответствующем длительности нескольких символов цифровой информации и определяющем полосу разрешения по частоте, выполнение быстрого преобразования Фурье для всех комбинаций информационных символов, в том числе и при повторении этих комбинаций при сдвигах в пределах неопределенности границ информационных символов, а также для анализируемых позиций по задержке, некогерентного суммирования и выделения из всех комбинаций одной, имеющей максимальное значение накопленного сигнала, отличающийся тем, что при некогерентном суммировании производят перенос по частоте всех комбинаций последовательностей сигнала на новые частоты, сдвинутые относительно исходной срединной частоты интервала неопределенности вверх и вниз на четверть интервала неопределенности, при этом для дальнейшей обработки из всех спектральных компонент на выходе быстрого преобразования Фурье берут половину спектральных компонент, примыкающих к сдвинутым частотам, по каждой спектральной компоненте проводят отбор максимального значения сигнала из всех сигналов, соответствующих всем возможным комбинациям информационных символов, из отобранных сигналов формируют таблицу, из которой с учетом корреляции сигналов в соседних ячейках определяют наиболее вероятную комбинацию по частоте и задержке принимаемого сигнала и фазе символа цифровой информации, а также уточняют значения частоты и задержки.
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2004 |
|
RU2280260C1 |
| СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИОННЫХ СООБЩЕНИЙ ПО РАДИОНАВИГАЦИОННОМУ КАНАЛУ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1999 |
|
RU2158933C1 |
| US 2006274822 A1, 07.12.2006 | |||
| CH 101132191 A, 27.02.2008. | |||

