Изобретение относится к радиоэлектронике и может быть использовано в приемниках навигационных сигналов ГЛОНАСС, GPS и ГАЛИЛЕО.
Известен способ поиска навигационных сигналов в частотно-временной области, включающий в себя проведение быстрого преобразования Фурье (БПФ) над N комплексными выборками (квадратуры I и Q) за интервал анализа Тан при поиске навигационного сигнала по задержке. Интервал анализа определяет полосу отдельной частотной ячейки, имеющей форму колокола, на выходе БПФ [1].
Такой способ формирования амплитудно-частотной характеристики квадратурного коррелятора имеет тот недостаток, что амплитудно-частотные характеристики соседних частотных ячеек пересекаются по уровню 0,4 по мощности, что снижает чувствительность анализатора БПФ и требует дополнительного увеличения мощности сигнала или времени анализа за счет некогерентного накопления сигнала.
Известен также способ поиска навигационных сигналов по частоте, включающий в себя когерентное накопление на временном интервале τког по каждой квадратуре и вычисление огибающей принимаемого сигнала [2].
Такой способ поиска по частоте, наиболее близкий к предлагаемому, имеет тот недостаток, что при поиске сигнала по частоте шаг поиска для уменьшения энергетических потерь должен быть меньше ширины полосы частотной ячейки, определяемой как Δf≈1/τког.
Предлагаемым изобретением решается задача увеличения шага поиска сигнала по частоте при фиксированном значении времени когерентного накопления в квадратурном корреляторе.
Для достижения этого технического результата в способ поиска навигационных сигналов по частоте, включающий в себя когерентное накопление на временном интервале τког по каждой квадратуре и вычисление огибающей принимаемого сигнала, дополнительно введены следующие операции:
разделение интервала когерентного накопления τког на две части, определение на каждом подынтервале значения корреляции, формирование из двух пар полученных значений квадратурных сигналов I1, Qi и I2, Q2 трех результирующих пар значений квадратурных сигналов I0, Qo, I+, Q+ и I-, Q, из которых первую пару формируют как сумму значений сигналов I1, I2 и Q1, Q2, вторую и третью пары формируют как сумму I1, Q1 и результатов поворота сигнала I2, Q2 на угол ±ϕ, для каждой результирующей пары квадратурных сигналов определение значений огибающей, выбор максимального по величине значения, которое является выходным сигналом на анализируемой частотно-временной позиции поиска.
Признаки, отличающие предлагаемый способ поиска навигационных сигналов по частоте от наиболее близкого к нему, известному по публикации в [2], характеризует разделение интервала когерентного накопления τког на две части, определение на каждом подинтервале значения корреляции, формирование из двух пар полученных значений квадратурных сигналов I1, Q1 и I2, Q2 трех результирующих пар значений квадратурных сигналов I0, Q0, I+, Q+ и I-, Q, из которых первую пару формируют как сумму значений сигналов I1, I2 и Q1, Q2, вторую и третью пары формируют как сумму I1, Q1 и результатов поворота сигнала I2, Q2 на угол ±ϕ, для каждой результирующей пары квадратурных сигналов определение значений огибающей, выбор максимального по величине значения, которое является выходным сигналом на анализируемой частотно-временной позиции поиска.
На фиг.1 приведена блок-схема устройства, реализующего предлагаемый способ поиска навигационных сигналов по частоте. Устройство содержит квадратурный коррелятор (1), перемножитель (2), опорный генератор (3), перемножитель (4), генератор ПСП (5), накопитель на интервале τког/2 (6), элемент задержки на время τког/2 (7), преобразователь (8), сумматор (9), вычислитель огибающей (10), блок выбора максимума (11).
Способ поиска навигационных сигналов по частоте реализуется следующим образом.
В квадратурном корреляторе 1, осуществляющем перемножение 2 входного сигнала с двумя квадратурами опорного сигнала 3, а затем перемножение 4 с кодовой дальномерной последовательностью, вырабатываемой генератором ПСП 5, вырабатываются на выходе накопителей 6 со временем накопления, равном половине когерентного интервала τког/2 корреляционные сигналы по квадратурам I и Q, которые задерживаются в элементе задержки 7 на время Тког/2 с тем, чтобы через интервал Тког получить по две пары накопленных сигналов I1, Q1 и I2, Q2. Указанные пары подаются на сумматоры 9.
В преобразователе 8 производится поворот вектора сигналов I2, Q2 на угол ±ϕ, что эквивалентно смещению частотной траектории сигнала на величину Δω=±ϕ/τког/2. В результате на выходе 9 формируются три результирующие пары I0, Q0, I+, Q+ и I-, Q-, которые формируются согласно следующим соотношениям:
I0=I1+I2
Q0=Q1+Q2
где



 .
.
формируются в преобразователе 8.
Для каждой пары результирующих значений I0, Q0; I+, Q+ и I-, Q- в вычислителе огибающей 10 вырабатываются значения модуля огибающей, соответственно Z0, Z+ и Z-, из которых определяется максимальное по величине Zвых=max (Z0; Z+; Z-). Это значение и является выходным сигналом на анализируемой позиции в частотно-временной области поиска.
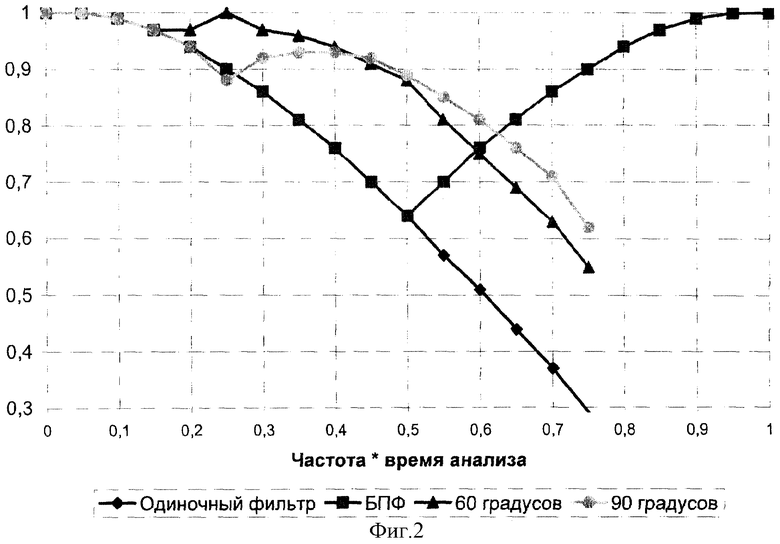
Параметр ϕ определяет форму результирующей амплитудно-частотной характеристики коррелятора. Наиболее удобными с точки зрения выполнения вычислений являются два значения параметра ϕ: ϕ=90° и ϕ=60°.
Получаемые при этом амплитудно-частотные характеристики коррелятора приведены на фиг.2. Для сравнения приведена амплитудно-частотная характеристика одной частотной ячейки на выходе БПФ. Аналогичная характеристика свойственна и обычному квадратурному коррелятору.
Из представленных графиков следует, что в предложенном способе поиска навигационных сигналов по частоте полоса амплитудно-частотной характеристики квадратурного коррелятора расширяется в зависимости от выбранного параметра ϕ на 20...25% по уровню 0,8, что снижает энергетический порог при поиске сигнала или уменьшает время его поиска.
Литература
1 (аналог). В. Shayevits, H. Cohen, J. Nir, E. Dochovny.
Very Efficient High Sensitivity Fully Coherent AGPS Signal Processing with Almost No Assistance Requirements. ION GPS 2002, 24-27 September 2002.
2 (прототип). II H. Choi, S.H. Park, D.J. Cho, S.J. Yun; Y.B. Kim, S.J. Lee.
A Novel Weak Signal Acquisition Scheme for Assisted GPS. ION GPS 2002, 24-27 September 2002.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2334357C1 |
| СПОСОБ ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2409892C2 |
| СПОСОБ ПРИЕМА ШУМОПОДОБНЫХ ЧАСТОТНО-МАНИПУЛИРОВАННЫХ СИГНАЛОВ С НЕПРЕРЫВНОЙ ФАЗОЙ | 2006 |
|
RU2323536C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ОРТОГОНАЛЬНЫХ ИГОЛЬЧАТЫХ ГЛАВНЫХ ЛЕПЕСТКОВ, СЕКТОРОВ И ПИКОЯЧЕЕК | 1998 |
|
RU2199182C2 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2017 |
|
RU2667484C1 |
| ЦИФРОВОЙ КОРРЕЛЯТОР ПРИЕМНИКА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2006 |
|
RU2310212C1 |
| СПОСОБ ПОДСТРОЙКИ РЕЗОНАНСНОЙ ЧАСТОТЫ ПОДВЕСА ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2308682C1 |
| МНОГОКОДОВЫЙ СИГНАЛ С УМЕНЬШЕННЫМ ОТНОШЕНИЕМ ПИКОВОГО ЗНАЧЕНИЯ К СРЕДНЕКВАДРАТИЧЕСКОМУ ЗНАЧЕНИЮ | 2009 |
|
RU2490812C2 |
Изобретение относится к радиоэлектронике и может быть использовано в приемниках навигационных сигналов ГЛОНАСС, GPS и ГАЛИЛЕО, в частности для поиска навигационных сигналов по частоте. Сущность способа состоит в том, что осуществляют когерентное накопление на временном интервале τког по каждой квадратуре и вычисление огибающей принимаемого сигнала, причем вырабатывают на временном интервале, равном τког/2, корреляционные сигналы I и Q, которые задерживают на время τког/2 и через интервал τког получают две пары значений квадратурных сигналов I1, Q1 и I2, Q2, из которых формируют три результирующие пары значений квадратурных сигналов I0 Q0, I+, Q+ и L, Q-, причем первую пару формируют как сумму значений сигналов I1, I2 и Q1, Q2, вторую и третью пары формируют как сумму I1, Q1 и результатов поворота сигнала I2, Q2 на угол ±ϕ, вычисляют значения огибающей Z0, Z+ и Z- для каждой результирующей пары квадратурных сигналов и выбирают максимальное по величине значение, которое является выходным сигналом на анализируемой частотно-временной позиции поиска. Технический результат - сокращение времени поиска сигнала за счет расширения полосы отдельного канала для увеличения шага поиска сигнала по частоте при фиксированном значении времени когерентного накопления в квадратурном корреляторе. 2 ил.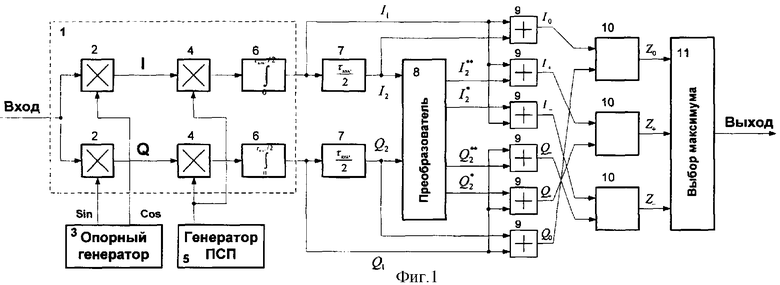
Способ поиска навигационных сигналов по частоте, включающий когерентное накопление на временном интервале τког по каждой квадратуре и вычисление огибающей принимаемого сигнала, отличающийся тем, что вырабатывают на временном интервале, равном τког/2, корреляционные сигналы I и Q, которые задерживают на время τког/2 и через интервал τког получают две пары значений квадратурных сигналов I1, Q1 и I2, Q2, из которых формируют три результирующие пары значений квадратурных сигналов I0, Q0, I+, Q+ и I-, Q-, причем первую пару формируют как сумму значений сигналов I1, I2 и Q1, Q2, вторую и третью пары формируют как сумму I1, Q1 и результатов поворота сигнала I2, Q2 на угол ±ϕ, вычисляют значения огибающей Z0, Z+ и Z- для каждой результирующей пары квадратурных сигналов и выбирают максимальное по величине значение, которое является выходным сигналом на анализируемой частотно-временной позиции поиска.
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2004 |
|
RU2280260C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2000 |
|
RU2178894C1 |
| WO 00/28346 А1, 18.05.2000 | |||
| US 5808582 A, 15.09.1998. | |||

