Техническое решение относится к горному делу, а именно к технике контроля направленного горизонтального бурения, и может быть использовано для определения горизонтального положения и поворота инструмента для формирования наклонных и горизонтальных скважин вокруг оси для последующего управления траекторией его движения.
Известен аппарат для указания правильного или неправильного положения спины по заявке на изобретение №97105405, кл. А63В 23/02, опубл. в БИ №11, 1999 г., включающий указатель наклона, соединенный с оголовьем повязкой для волос, ушным зажимом или другим подходящим средством для крепления к голове человека. Указатель наклона состоит из основного корпуса, жестко закрепленного на оголовье или подобном ему предмете, и корпуса указателя, установленного с возможностью перемещения по меньшей мере в одном направлении из начального положения, которое указывает правильное положение головы относительно основного корпуса, по существу в или на поверхности, по существу параллельной или совпадающей с горизонтальной плоскостью, в результате чего корпус указателя обеспечивает перемещение относительно основного корпуса, когда происходит определенная степень отклонения от правильного положения головы и возврат в начальное положение, когда положение головы снова становится правильным. Подвижным корпусом является ртутный шарик или ему подобный, который при отклонении от правильного положения головы замыкает электронную схему, или где положение подвижного корпуса указывается датчиком расстояния, и что электронная схема выполнена с возможностью подачи слышимого звука, вибрации, светового сигнала или тому подобного.
Недостатком данного аппарата является отсутствие автономного источника питания, что ограничивает возможности его применения, также с помощью данного аппарата невозможно определять направление поворота объекта вокруг оси.
Наиболее близким решением по технической сущности и совокупности существенных признаков является устройство для контроля за положением отклонителя ствола скважины по патенту РФ № 2052091, кл. Е21В 47/02, опубл. БИ № 17, 2000 г., которое содержит расположенную над отклонителем диамагнитную трубу, инклинометр с датчиками зенитного угла и азимута и фиксатор положения инклинометра относительно отклонителя, цилиндр с герметичной тороидальной полостью, в которой соосно размещены металлическое кольцо и разомкнутый в точке кольцевой резисторный элемент. Цилиндр жестко закреплен внутри корпуса инклинометра соосно с ним и выполнен из непроводящего электрический ток материала, а в тороидальную полость введена ртуть для замыкания в процессе измерений металлического кольца и кольцевого резисторного элемента.
Недостаток устройства заключается в передаче информации на поверхность земли по проводному каналу связи, что ограничивает возможности применения устройства и снижает его надежность из-за воздействия на инструмент ударно-вращательных нагрузок. Также при воздействии указанных нагрузок ртуть не гарантированно замыкает между собой в процессе измерений металлическое кольцо и кольцевой резисторный элемент, что снижает точность устройства.
Техническая задача устройства для определения положения инструмента для формирования наклонных и горизонтальных скважин заключается в повышении его надежности и точности, а также в расширении возможностей применения указанного устройства в условиях воздействия на него больших ударно-вращательных нагрузок за счет передачи информации на поверхность земли по беспроводному каналу связи.
Поставленная техническая задача решается тем, что в устройство для определения положения инструмента для формирования наклонных и горизонтальных скважин по первому варианту (далее - устройство), содержащее ртутный датчик, согласно техническому решению дополнительно введены два ртутных датчика и три мультивибратора, СВЧ-генератор, передающая антенна, приемник электромагнитных сигналов, три активных фильтра и три световых индикатора положения инструмента. При этом выход первого ртутного датчика соединен со входом первого мультивибратора, выход второго ртутного датчика - со входом второго мультивибратора, а выход третьего ртутного датчика - со входом третьего мультивибратора. Выходы указанных мультивибраторов соединены соответственно с первым, вторым и третьим входами СВЧ-генератора, выход которого соединен со входом передающей антенны. Приемник электромагнитных сигналов расположен на поверхности земли, причем каждый из трех выходов этого приемника соединен соответственно со входом одного из трех активных фильтров, а выход каждого активного фильтра - соответственно со входом одного из трех световых индикаторов положения инструмента. Оси первого и третьего ртутных датчиков симметричны относительно оси второго ртутного датчика и лежат с ней в одной плоскости, составляя каждая с плоскостью ориентации устройства, перпендикулярной оси второго ртутного датчика, угол α, при котором происходит гарантированное срабатывание первого и третьего ртутных датчиков.
Указанная совокупность признаков позволяет повысить надежность устройства за счет использования беспроводного канала связи между передающей антенной и приемником электромагнитных сигналов, а также расширить область применения данного устройства, так как отсутствие проводов даст возможность размещать его на любых объектах, в том числе подвергающихся ударно-вращательным нагрузкам. Точность предлагаемого устройства повышается за счет размещения ртутных датчиков указанным выше способом, который исключает случайное размыкание или замыкание контактов каждого ртутного датчика при воздействии на инструмент ударно-вращательных нагрузок.
Во втором варианте исполнения в устройство, содержащее ртутный датчик, согласно техническому решению дополнительно введены два ртутных датчика и три мультивибратора, акустический излучатель, приемник акустических сигналов, три активных фильтра и три световых индикатора положения инструмента. При этом выход первого ртутного датчика соединен со входом первого мультивибратора, выход второго ртутного датчика - со входом второго мультивибратора, а выход третьего ртутного датчика - со входом третьего мультивибратора. Выходы указанных мультивибраторов соединены соответственно с первым, вторым и третьим входами акустического излучателя. Приемник акустических колебаний расположен на поверхности земли, причем каждый из трех выходов этого приемника соединен соответственно со входом одного из трех активных фильтров, а выход каждого активного фильтра - соответственно со входом одного из трех световых индикаторов положения инструмента. Оси первого и третьего ртутных датчиков симметричны относительно оси второго ртутного датчика и лежат с ней в одной плоскости, составляя каждая с плоскостью ориентации устройства, перпендикулярной оси второго ртутного датчика, угол α, при котором происходит гарантированное срабатывание первого и третьего ртутных датчиков.
Указанная совокупность признаков позволяет повысить надежность устройства за счет использования беспроводного канала связи между акустическим излучателем и приемником акустических сигналов, а также расширить область применения данного устройства, так как отсутствие проводов даст возможность размещать его на любых объектах, в том числе подвергающихся ударно-вращательным нагрузкам. Точность предлагаемого устройства повышается за счет размещения ртутных датчиков указанным выше способом, который исключает случайное размыкание или замыкание контактов каждого ртутного датчика при воздействии на инструмент ударно-вращательных нагрузок.
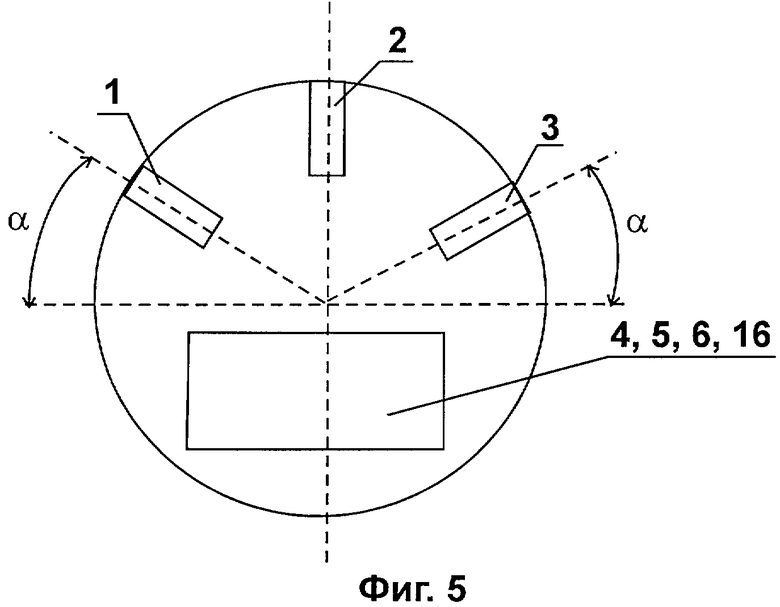
Сущность технического решения поясняется примером конкретного исполнения устройства и чертежами: на фиг.1 изображена структурная схема устройства по первому варианту исполнения; на фиг.2 - то же, по второму варианту исполнения; на фиг.3 показано размещение на плате ртутных датчиков и мультивибраторов, выполненное по первому варианту исполнения; на фиг.4 показано размещение на плате СВЧ-генератора и передающей антенны, выполненное по первому варианту исполнения; на фиг.5 показано размещение на плате ртутных датчиков, мультивибраторов и акустического излучателя, выполненное по второму варианту исполнения.
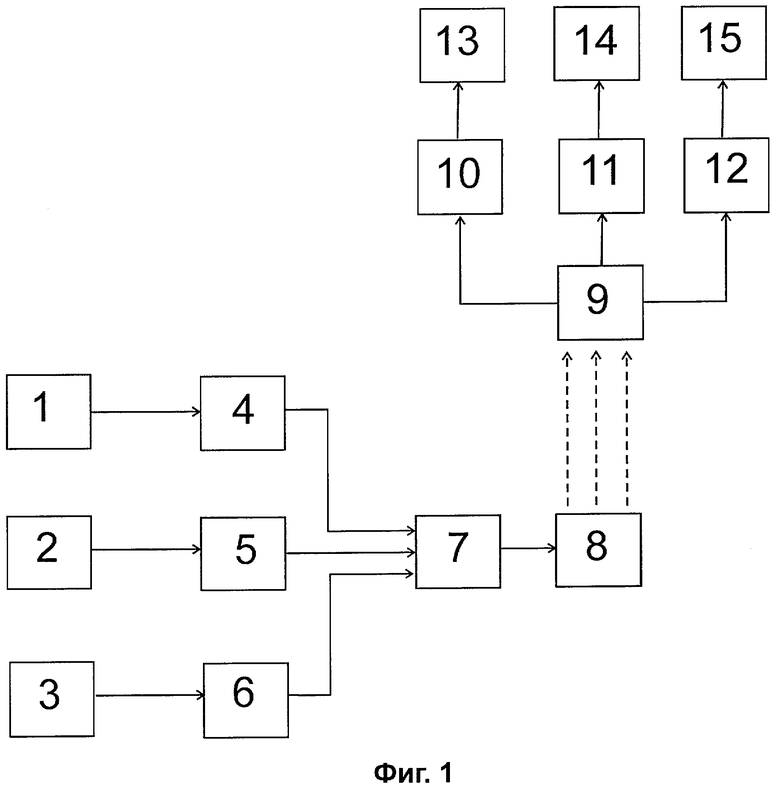
Структурная схема устройства по первому варианту исполнения (фиг.1) содержит: первый ртутный датчик 1, второй, средний, ртутный датчик 2, третий ртутный датчик 3, первый мультивибратор 4, второй мультивибратор 5, третий мультивибратор 6, СВЧ-генератор 7, передающую антенну 8, приемник 9 электромагнитных сигналов, первый активный фильтр 10, второй активный фильтр 11, третий активный фильтр 12, первый световой индикатор 13, второй световой индикатор 14 и третий световой индикатор 15 положения инструмента (далее световые индикаторы 13-15). Выход первого ртутного датчика 1 соединен со входом первого мультивибратора 4. Выход второго, среднего, ртутного датчика 2 соединен со входом второго мультивибратора 5, а выход третьего ртутного датчика 3 - со входом третьего мультивибратора 6. Выходы мультивибраторов 4, 5 и 6 соединены соответственно с первым, вторым и третьим входами СВЧ-генератора 7, выход которого соединен со входом передающей антенны 8. Приемник 9 электромагнитных сигналов расположен на поверхности земли, при этом каждый из трех выходов указанного приемника 9 соединен соответственно со входом одного из трех активных фильтров 10, 11 и 12, а выход каждого активного фильтра 10, 11 и 12 - соответственно со входом одного из трех световых индикаторов 13, 14 и 15. Оси первого 1 и третьего 3 ртутных датчиков симметричны относительно оси второго, среднего, ртутного датчика 2 и лежат с ней в одной плоскости, составляя каждая с плоскостью ориентации устройства, перпендикулярной оси второго ртутного датчика 2, угол α, при котором происходит гарантированное срабатывание первого 1 и третьего 3 ртутных датчиков.
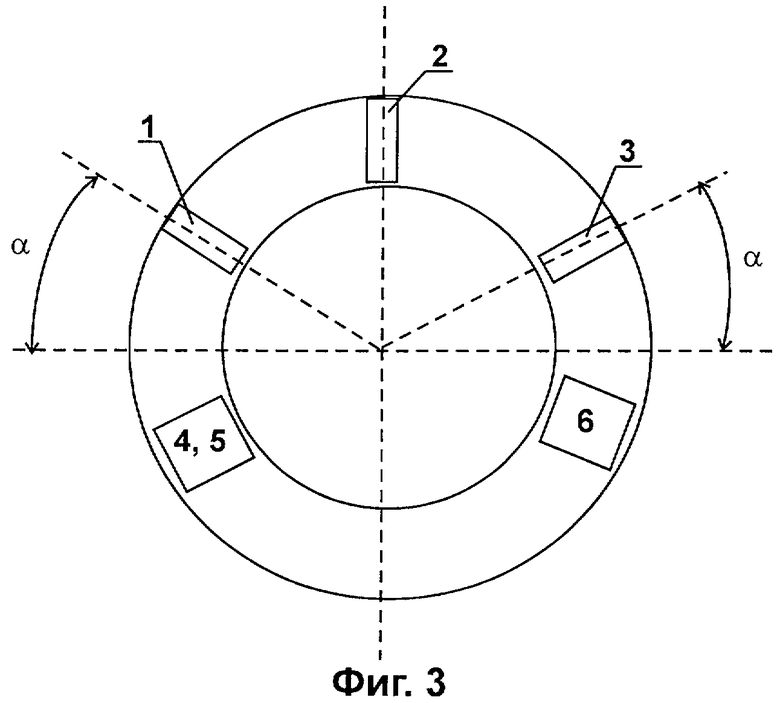
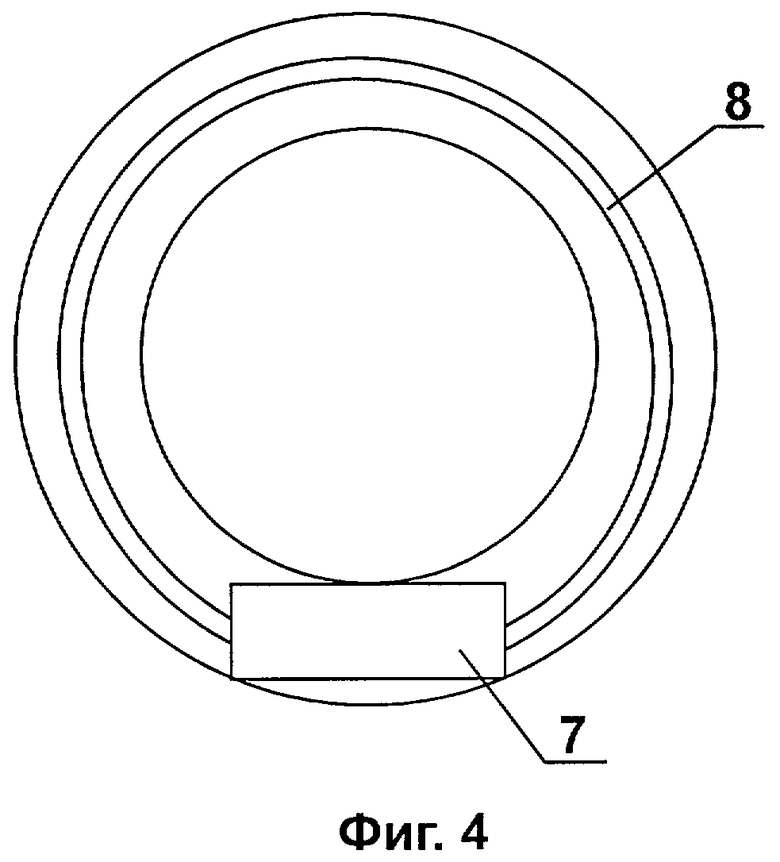
Ртутные датчики 1, 2 и 3 и мультивибраторы 4, 5 и 6 расположены на плате, например, в виде кольца из стеклотекстолита (на фиг.3 поз. не обозначено) таким образом, чтобы его можно было надеть на инструмент для формирования наклонных и горизонтальных скважин (далее - инструмент). На второй плате в виде кольца из стеклотекстолита (на фиг.4 поз. не обозначено) аналогичных размеров размещены СВЧ-генератор 7 и передающая антенна 8. Между кольцами для герметизации помещено, например, кольцо из диэлектрика, и вся конструкция соединена с помощью винтов. Плоскость инструмента, относительно которой ориентировано устройство, перпендикулярна оси второго, среднего, ртутного датчика 2, когда его контакты замкнуты. Для правильной работы устройство должно оставаться неподвижным относительно корпуса инструмента, а для уменьшения влияния корпуса инструмента на работу передающей антенны 8 необходимо изолировать от него плату, на которой расположен СВЧ-генератор 7 с передающей антенной 8, радиочастотным материалом.
Устройство по первому варианту работает следующим образом. Изначально каждый ртутный датчик 1, 2 и 3 находится в замкнутом состоянии. Для этого угол α (фиг.3) должен быть таков, чтобы обеспечивалось гарантированное срабатывание первого ртутного датчика 1 и третьего ртутного датчика 3. Погрешность определения положения инструмента равна углу α, который зависит от типа ртутных датчиков 1, 2, 3. Когда контакты всех ртутных датчиков 1, 2 и 3 замкнуты, запускаются все три мультивибратора 4, 5 и 6. Это означает, что плоскость инструмента, относительно которой ориентировано устройство, расположена горизонтально, о чем информирует срабатывание первого 13, второго 14 и третьего 15 световых индикаторов.
При повороте инструмента против часовой стрелки на угол, превышающий угол α, но меньший 90°, происходит гарантированное размыкание контактов первого ртутного датчика 1, а контакты второго 2 и третьего 3 ртутных датчиков остаются замкнутыми, при этом срабатывают только второй 5 и третий 6 мультивибраторы. При повороте инструмента по часовой стрелке на этот же угол происходит гарантированное размыкание контактов третьего ртутного датчика 3, а контакты первого 1 и второго 2 ртутных датчиков остаются замкнутыми, при этом происходит срабатывание только первого 4 и второго 5 мультивибраторов. С выходов мультивибраторов 4, 5 и 6 электромагнитные сигналы поступают на СВЧ-генератор 7 и запускают его. Электромагнитные колебания, создаваемые СВЧ-генератором 7, излучаются передающей антенной 8 и на поверхности земли принимаются с помощью приемника 9 электромагнитных сигналов, на выходе которого активные фильтры 10, 11 и 12 выделяют принятые электромагнитные сигналы по частоте. Частота электромагнитного сигнала зависит от положения плоскости инструмента, относительно которой устройство ориентировано. При этом оператор по срабатыванию только второго 14 и третьего 15 световых индикаторов определяет поворот инструмента против часовой стрелки, а по срабатыванию только первого 13 и второго 14 световых индикаторов - поворот по часовой стрелке. Горизонтальное положение инструмента определяют по одновременному срабатыванию всех трех световых индикаторов 13, 14 и 15.
Поворот инструмента вокруг оси на угол больше 90° по часовой стрелке приводит к размыканию контактов второго 2 и третьего 3 ртутных датчиков, при этом сигналы на входах второго 5 и третьего 6 мультивибраторов отсутствуют, и соответственно сработает только первый световой индикатор 13.
Поворот инструмента вокруг оси на угол больше 90° против часовой стрелки приводит к размыканию контактов первого 1 и второго 2 ртутных датчиков, при этом сигналы на входах первого 4 и второго 5 мультивибраторов отсутствуют, и соответственно сработает только третий световой индикатор 15.
Поворот инструмента вокруг оси на 180° приводит к размыканию контактов всех ртутных датчиков 1, 2 и 3, при этом сигналы на входах мультивибраторов 4, 5 и 6 отсутствуют, и соответственно ни один из световых индикаторов 13, 14, 15 не срабатывает.
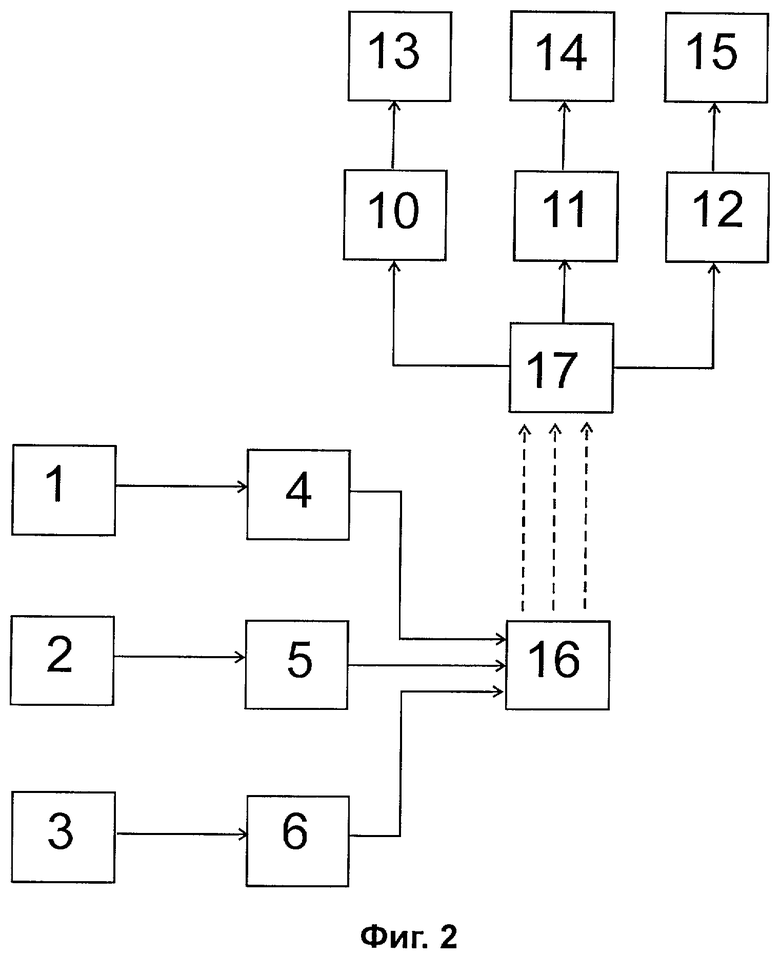
Структурная схема устройства по второму варианту исполнения (фиг.2) содержит: первый ртутный датчик 1, второй, средний, ртутный датчик 2, третий ртутный датчик 3, первый мультивибратор 4, второй мультивибратор 5, третий мультивибратор 6, акустический излучатель 16, приемник 17 акустических сигналов, первый активный фильтр 10, второй активный фильтр 11, третий активный фильтр 12, первый световой индикатор 13, второй световой индикатор 14 и третий световой индикатор 15 положения инструмента (далее световые индикаторы 13-15). Выход первого ртутного датчика 1 соединен со входом первого мультивибратора 4. Выход второго, среднего, ртутного датчика 2 соединен со входом второго мультивибратора 5, а выход третьего ртутного датчика 3 - со входом третьего мультивибратора 6. При этом выходы указанных мультивибраторов 4, 5 и 6 соединены соответственно с первым, вторым и третьим входами акустического излучателя 16. Приемник 17 акустических сигналов расположен на поверхности земли и каждый из трех его выходов соединен соответственно со входом одного из трех активных фильтров 10, 11 и 12, а выход каждого активного фильтра 10, 11 и 12 - соответственно со входом одного из трех световых индикаторов 13, 14 и 15. Оси первого 1 и третьего 3 ртутных датчиков симметричны относительно оси второго ртутного датчика 2 и лежат с ней в одной плоскости, составляя каждая с плоскостью ориентации устройства, перпендикулярной оси второго ртутного датчика 2, угол α, при котором происходит гарантированное срабатывание первого 1 и третьего 3 ртутных датчиков.
Ртутные датчики 1, 2, 3 вместе с мультивибраторами 4, 5, 6 и акустическим излучателем 16 расположены на плате, например, в виде круга из стеклотекстолита (на фиг.5 поз. не обозначен). Диаметр круга определяется внутренним диаметром инструмента. Вся конструкция помещена в полость инструмента так, чтобы его плоскость, относительно которой ориентируют устройство, располагалась перпендикулярно оси второго, среднего, ртутного датчика 2, когда его контакты замкнуты. Для правильной работы устройство должно оставаться неподвижным относительно корпуса инструмента.
Устройство по второму варианту работает следующим образом.
Каждый ртутный датчик 1, 2 и 3 изначально находится в замкнутом состоянии. Для этого угол α (фиг.5) должен быть таков, чтобы обеспечивалось гарантированное срабатывание первого ртутного датчика 1 и третьего ртутного датчика 3. Погрешность определения положения инструмента равна углу α, который зависит от типа ртутных датчиков 1, 2, 3. Когда контакты всех ртутных датчиков 1, 2 и 3 замкнуты, запускаются все три мультивибратора 4, 5 и 6. Это означает, что плоскость инструмента, относительно которой ориентировано устройство, расположена горизонтально, о чем информирует одновременное срабатывание первого 13, второго 14 и третьего 15 световых индикаторов.
При повороте инструмента против часовой стрелки на угол, превышающий угол α, но меньший 90°, происходит гарантированное размыкание контактов первого ртутного датчика 1, а контакты второго 2 и третьего 3 ртутных датчиков остаются замкнутыми, при этом срабатывают только второй 5 и третий 6 мультивибраторы. При повороте инструмента по часовой стрелке на этот же угол происходит гарантированное размыкание контактов третьего ртутного датчика 3, а контакты первого 1 и второго 2 ртутных датчиков остаются замкнутыми, при этом происходит срабатывание только первого 4 и второго 5 мультивибраторов. С выходов мультивибраторов 4, 5 и 6 электромагнитные сигналы поступают на акустический излучатель 16, который преобразует электромагнитные сигналы в акустические колебания заданной частоты. Последние принимают на поверхности земли любым приемником 17 акустических колебаний. Далее акустические колебания с помощью одного из трех активных фильтров 10, 11, 12 выделяют по частоте. Частота электромагнитного сигнала зависит от положения плоскости инструмента, относительно которой устройство ориентировано. При этом оператор по срабатыванию только второго 14 и третьего 15 световых индикаторов определяет поворот инструмента против часовой стрелки, а по срабатыванию первого 13 и второго 14 световых индикаторов - поворот по часовой стрелке. Горизонтальное положение инструмента определяют по одновременному срабатыванию всех трех световых индикаторов 13, 14 и 15 положения инструмента.
Поворот инструмента вокруг оси на угол больше 90° по часовой стрелке приводит к размыканию контактов второго 2 и третьего 3 ртутных датчиков, при этом сигналы на входах второго 5 и третьего 6 мультивибраторов отсутствуют, и соответственно сработает только первый световой индикатор 13.
Поворот инструмента вокруг оси на угол больше 90° против часовой стрелки приводит к размыканию контактов первого 1 и второго 2 ртутных датчиков, при этом сигналы на входах первого 4 и второго 5 мультивибраторов отсутствуют, и соответственно сработает только третий световой индикатор 15.
Поворот инструмента вокруг оси на 180° приводит к размыканию контактов всех ртутных датчиков 1, 2 и 3, при этом сигналы на входах мультивибраторов 4, 5 и 6 отсутствуют, и соответственно ни один из световых индикаторов 13, 14, 15 не срабатывает.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ РАДИОЛУЧЕВАЯ СИСТЕМА ОБНАРУЖЕНИЯ | 1998 |
|
RU2155382C2 |
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1968 |
|
SU220091A1 |
| ДАТЧИК ПРЕПЯТСТВИЯ /ВАРИАНТЫ/ | 2012 |
|
RU2527196C2 |
| РАДИОЛОКАЦИОННЫЙ ПРИБОР ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ДЛЯ СЛАБОВИДЯЩИХ И СЛЕПЫХ ЛЮДЕЙ | 2018 |
|
RU2679924C1 |
| Передатчик универсальный для систем оповещения | 2018 |
|
RU2679613C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОЛОЖЕНИЯ БУРИЛЬНОГО ИНСТРУМЕНТА, СИСТЕМА БЕСТРАНШЕЙНОГО ПОДЗЕМНОГО БУРЕНИЯ И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ БУРИЛЬНОГО ИНСТРУМЕНТА | 1996 |
|
RU2175368C2 |
| АВТОМОБИЛЬНОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ СИГНАЛОВ РАДАРНЫХ УСТАНОВОК КОНТРОЛЯ СКОРОСТИ ДВИЖЕНИЯ НА АВТОТРАССАХ | 1993 |
|
RU2084910C1 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2516244C2 |
| РАДИОЛОКАТОР | 1984 |
|
SU1841061A1 |
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1999 |
|
RU2149424C1 |
Изобретение относится к горному делу - к технике контроля направленного горизонтального бурения, используется для определения горизонтального положения и поворота инструмента для формирования наклонных и горизонтальных скважин вокруг оси для последующего управления траекторией его движения. Техническим результатом изобретения является повышение надежности и точности, расширение возможности применения устройства за счет передачи информации по беспроводному каналу связи. Устройство по первому варианту содержит три ртутных датчика (РД), соединенных каждый с одним из трех мультивибраторов, соединенных с соответствующими входами СВЧ-генератора, выход которого соединен со входом передающей антенны. Приемник электромагнитных сигналов (ЭМС) расположен на земле. Его три выхода соединены соответственно с входами трех активных фильтров, каждый соединенный выходом с соответствующим входом одного из трех световых индикаторов положения инструмента. Оси первого и третьего РД симметричны относительно оси второго РД и лежат с ней в одной плоскости, составляя каждая с плоскостью ориентации устройства, перпендикулярной оси второго РД, угол α, при котором происходит гарантированное срабатывание первого и третьего РД. По второму варианту устройство содержит те же элементы, а вместо передающей антенны, СВЧ-генератора и приемника ЭМС содержит акустический излучатель и приемник его колебаний. Частота ЭМС зависит от положения плоскости инструмента, относительно которой устройство ориентировано. 2 н.п. ф-лы, 5 ил.
1. Устройство для определения положения инструмента для формирования наклонных и горизонтальных скважин, содержащее ртутный датчик, отличающееся тем, что в него дополнительно введены два ртутных датчика и три мультивибратора, СВЧ-генератор, передающая антенна, приемник электромагнитных сигналов, три активных фильтра и три световых индикатора положения инструмента, при этом выход первого ртутного датчика соединен со входом первого мультивибратора, выход второго ртутного датчика - со входом второго мультивибратора, а выход третьего ртутного датчика - со входом третьего мультивибратора, при этом выходы указанных мультивибраторов соединены соответственно с первым, вторым и третьим входами СВЧ-генератора, выход которого соединен со входом передающей антенны, а приемник электромагнитных сигналов расположен на поверхности земли, причем каждый из трех выходов этого приемника соединен соответственно со входом одного из трех активных фильтров, а выход каждого активного фильтра - соответственно со входом одного из трех световых индикаторов положения инструмента, при этом оси первого и третьего ртутных датчиков симметричны относительно оси второго ртутного датчика и лежат с ней в одной плоскости, составляя каждая с плоскостью ориентации устройства, перпендикулярной оси второго ртутного датчика, угол α, при котором происходит гарантированное срабатывание первого и третьего ртутных датчиков.
2. Устройство для определения положения инструмента для формирования наклонных и горизонтальных скважин, содержащее ртутный датчик, отличающееся тем, что в него дополнительно введены два ртутных датчика и три мультивибратора, акустический излучатель, приемник акустических сигналов, три активных фильтра и три световых индикатора положения инструмента, при этом выход первого ртутного датчика соединен со входом первого мультивибратора, выход второго ртутного датчика - со входом второго мультивибратора, а выход третьего ртутного датчика - со входом третьего мультивибратора, при этом выходы указанных мультивибраторов соединены соответственно с первым, вторым и третьим входами акустического излучателя, а приемник акустических колебаний расположен на поверхности земли, причем каждый из трех выходов этого приемника соединен соответственно со входом одного из трех активных фильтров, а выход каждого активного фильтра -соответственно со входом одного из трех световых индикаторов положения инструмента, при этом оси первого и третьего ртутных датчиков симметричны относительно оси второго ртутного датчика и лежат с ней в одной плоскости, составляя каждая с плоскостью ориентации устройства, перпендикулярной оси второго ртутного датчика, угол а, при котором происходит гарантированное срабатывание первого и третьего ртутных датчиков.
| RU 2052091 C1, 10.01.1996 | |||
| СПОСОБ ПРОВОДКИ ГОРИЗОНТАЛЬНЫХ СКВАЖИН | 1988 |
|
RU1572097C |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1997 |
|
RU2130118C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| СПОСОБ ПРОВОДКИ СТВОЛА ГОРИЗОНТАЛЬНОЙ СКВАЖИНЫ НА ОСНОВЕ ГЕОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ | 2006 |
|
RU2313668C1 |
| Регулятор содержания углекислоты в топочном газе | 1941 |
|
SU65635A1 |
| Способ монтажа портального крана | 1935 |
|
SU49107A1 |
| RU 94023712 A1, 20.02.1996 | |||
| US 4582147 A, 15.04.1986 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ТЕМПЕРАТУРЫ СОДЕРЖИМОГО СОСУДА | 1992 |
|
RU2043747C1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ГИБКИХ ТРУБ | 2013 |
|
RU2541366C1 |

