Изобретение относится к области радиолокации и может использоваться для автономной посадки вертолета на горизонтальную и наклонную поверхность в условиях отсутствия оптической видимости и в сложных метеорологических условиях (СМУ) (дым при лесных пожарах, туман, снегопад и т.п.). Изобретение может быть использовано для создания автоматических систем посадки и взлета беспилотных вертолетов.
В настоящее время для обеспечения широкого круга различных задач вертолеты должны совершать взлеты и посадки на аэродромы, посадочные площадки малых размеров, в том числе необорудованные и расположенных на высотах до 3000-4000 м над уровнем моря, наклонные, вблизи отвесных скал, оврагов, горных хребтов, а также на палубу кораблей, платформ и т.д. в условиях отсутствия визуальной видимости и в сложных метеорологических условиях (СМУ). В этих условиях необходим точный расчет посадочной траектории, например из точки «висения». Поэтому появилась необходимость создания новых систем, обеспечивающих посадку на горизонтальные и наклонные поверхности, которые должны обеспечивать высокие точности, помехозащищенность, компактность, низкое энергопотребление.
Повышение требований к безопасности посадки вертолета в СМУ заставляет искать новые пути точных измерений положения вертолета относительно посадочной поверхности и разрабатывать эффективные средства контроля и управления посадкой вертолета. Одним из таких путей может быть новый радиолокационный способ посадки вертолета в СМУ. Существующие средства автоматизации управления вертолетом и особенно в режиме посадки не решают полностью эти проблемы. /Дегтярев В.М., Русанов А.К. Возможности радиолокационных систем посадки вертолета в горах. Вопросы радиоэлектроники, серия Радиолокационная техника (РЛТ), выпуск 2, 2011, с.48-58./ При создании беспилотных вертолетов, возникает много трудностей для обеспечения посадки таких вертолетов особенно в СМУ и на наклонную поверхность. Экипажу вертолета необходимо предоставить средства визуализации и необходимые символьные и графические данные для прогнозирования и принятия решений в ходе посадки, как в автоматическом, так и при ручном способе.
Посадка вертолета осуществляется из точки пространства, в которой экипаж принял решение о посадке, до момента касания шасси вертолета посадочной поверхности. При этом наиболее вероятна посадка вертолета на поверхность из точки зависания.
Координаты контрольных точек полета и параметры движения определяются средствами навигации в географической системе координат и определяются в следующем порядке:
- центр посадочной поверхности,
- начальная точка снижения,
- скорость и время снижения на посадочной глиссаде,
- точка зависания вертолета,
- направление снижения из точки зависания.
Посадка и взлет вертолета в СМУ при отсутствии визуальной видимости является сложным процессом, особенно при посадке на наклонную поверхность. Сильный меняющийся по направлению ветер, сложные условия видимости, туман, дождь, снегопад, грозовые разряды, недостаточный обзор нижней полусферы из кабины вертолета создают проблемы экипажу вертолета при посадке.
При создании беспилотных вертолетов возникло множество трудностей для обеспечения безопасности посадки, в том числе на наклонную поверхность таких вертолетов автоматическим способом в простых и особенно в СМУ /Дегтярев В.М., Русанов А.К. Возможности радиолокационных систем посадки вертолета в горах. Вопросы радиоэлектроники, серия Радиолокационная техника (РЛТ), выпуск 2, 2011, с.48-58./.
Для определения местоположения вертолета относительно посадочной площадки на них устанавливаются различные виды навигационных систем. Следует заметить, что для большинства вертолетов не требуется посадка на очень малые площадки (палубу корабля), поэтому система посадки должна быть более простой, обеспечивать посадку вертолетов не только на земную, но также на водную и наклонную поверхности в СМУ и быть автономной.
Известен способ /Дегтярев В.М., Офицеров П.Л. Комплексное использование радиолокационных и других средств для посадки вертолетов на палубу корабля. Вопросы радиоэлектроники, серия Радиолокационная техника (РЛТ), выпуск 1, 2010, с.28-35./ контроля посадки на посадочную поверхность малых размеров, например, палубу корабля в условиях качки (система КА8Т), заключающийся в использовании троса опускаемого с зависшего вертолета, который связан, например, со швартовочным устройством на палубе. После закрепления трос подтягивается палубной лебедкой, а пилот плавно снижает вертолет, совершая посадку.
К недостаткам данного способа относятся:
1. Неавтономность, требующая наличия на палубе швартовочного устройства и лебедки, а также обслуживающего персонала, осуществляющего процесс закрепления троса (швартовки).
2. Сложность осуществления способа, заключающаяся в закреплении троса (швартовки) в СМУ, при наличии сильного ветра, качки и других внешних воздействий.
Известен способ /Дегтярев В.М., Офицеров П.Л. Комплексное использование радиолокационных и других средств для посадки вертолетов на палубу корабля. Вопросы радиоэлектроники, серия Радиолокационная техника (РЛТ), выпуск 1, 2010, с.28-35/, основанный на совместном использовании акустических и радиоволн (радиоакустические локаторы (РАЛ)), позволяющий повысить точность измерения на небольших расстояниях (до 100 м) в СМУ не за счет повышения точности измерения времени, а путем использования сигнала, имеющего малую скорость распространения. Способ заключается в том, что на посадочной площадке корабля располагаются три передатчика РАЛ, работающих в одном радиодиапазоне, но разных акустических диапазонах, три приемника, расположенные на вертолете, принимают общий радиосигнал и три акустических сигнала от передатчиков, что позволяет измерить 9 расстояний и вычислить координаты трех точек посадочной опоры вертолета относительно посадочной площадки, вычислить высоту, удаление и направление на посадочную площадку, а также курс, тангаж и крен вертолета в определенный момент времени.
К недостаткам данного способа относятся:
1. Неавтономность, требующая наличия на посадочной площадке трех РАЛ передатчиков.
2. Сложность реализации и высокая стоимость.
Известен способ /патент РФ №2019471, кл. B64F 1/8/ с использованием телевизионной системы, заключающийся в том, что на посадочной площадке устанавливаются три светомаяка, подключенных к генератору мельканий, расположенных в вершинах равностороннего треугольника со стороной 5-10 м, работающих в ИК диапазоне и обеспечивающих световые потоки в сферических углах, достаточных для обнаружения их с борта вертолета, как на этапе подлета, так и на этапе снижения. На борту вертолета установлены переключаемые с помощью коммутатора две телевизионные камеры, оптическая ось первой камеры совпадает с продольной осью вертолета и используется на этапе подлета для определения расстояния до светомаяков, а оптическая ось второй телевизионной камеры расположена перпендикулярно оси первой и используется на этапе снижения для определения высоты и скорости снижения. Во время зависания и снижения вертолета информация со второй телевизионной камеры используется для расчета координат центра тяжести треугольника, образованного светомаяками и формирования телевизионного индекса, который выводится на устройство отображения информации, на которое также поступает информация о высоте и скорости снижения. Пилот осуществляет посадку, совмещая на экране устройства отображения телевизионный индекс с центром треугольника в вершинах которого расположены отметки от светомаяков.
К недостаткам данного способа относятся:
1. Неавтономность, требующая наличия на посадочной площадке светомаяков и генератора мельканий.
2. Снижение точности в условиях отсутствия визуальной видимости и в сложных метеоусловиях.
3. Невозможность посадки на наклонную поверхность.
4. Большие габариты наземной аппаратуры.
Известен оптико-локационный способ /Патент РФ №2322683, кл. G01S 13/93, от 20.04.2008 г./ обеспечения безопасности полетов вертолета, заключающийся в получении информации о направлении и расстоянии до препятствий в зоне кругового обзора путем излучения К идентичных модулей, содержащих передающую и приемную оптические системы, в совокупности всех оптических передатчиков в плоском угле 360° в плоскости, перпендикулярной вертикальной оси вертолета, при этом каждый из оптических передатчиков излучает короткие световые импульсы с частотой модулятора через оптическую систему в секторе с плоским углом 360°/К, приеме оптического сигнала, отраженного препятствием, находящимся в секторе приемной оптической системы, оптическим приемником излучения, обработки его совместно с сигналами с поступающих со всех модуляторов оптических передатчиков системой обработки информации, определения расстояний и секторов приема сигналов от препятствия путем сравнения сигналов с оптических приемников и модуляторов системой обработки информации, формировании на основе этой информации световых и звуковых сигналов для предупреждения пилота о направлении и расстоянии до препятствия.
К недостаткам данного способа относятся:
1. Отсутствие возможности определения условий сближения вертолета с препятствием при полете и посадке, так как не учитывается время достижения вертолетом предельного расстояния до преграды, отсутствует информация о выполнении команды «отворот» при достижении предельного значения расстояния до препятствия, отсутствует информация о величине вертикальной скорости посадки вертолета, а также информация о превышении скорости вертикальной посадки вертолета в случае превышения текущей скорости посадки заданных значений.
2. Невозможность использования способа в сложных метеорологических условиях.
Наиболее близким по технической сущности к заявленному способу является «Способ обеспечения безопасности полета и посадки вертолета и устройство для его осуществления» /Патент РФ №2384862 C2 G01S 113/93)/. Это изобретение относится к области оптико-локационной техники и может быть использовано в части обеспечения безопасности полета и посадки вертолета. Суть изобретения заключается в том, что в данном способе-прототипе излучают и принимают отраженные электромагнитные сигналы, определяют скорость снижения вертолета, сравнивают ее с заданной и выдают информацию в случае превышения заданного значения. При этом осуществляется получение информации о направлении и расстоянии до препятствий в зоне кругового обзора, путем излучения совокупности всех оптических передатчиков в плоском угле 360° в плоскости, перпендикулярной вертикальной оси вертолета, приеме оптического сигнала, отраженного препятствием, находящимся в центре приема, обработке его совместно с сигналами поступающими с модуляторов оптических передатчиков, определения расстояний и секторов приема сигналов от препятствия путем сравнения сигналов с оптических приемников и модуляторов, формировании на основе этой информации световых и звуковых сигналов для предупреждения летчика о направлении и расстоянии до препятствия, определяют текущую вертикальную скорость посадки вертолета (на основе измерения расстояний) и осуществляют выдачу информации о вертикальной скорости посадки вертолета, сравнивают текущее значение вертикальной скорости посадки вертолета с заданным значением и осуществляют выдачу информации о превышении вертикальной скорости над заданным значением.
Этот данный описанный способ, принятый за прототип обладает следующими недостатками:
1. Невозможность работы в сложных метеорологических условиях из-за затухания оптического излучения в дожде, при тумане, снеге и т.п.
2. Сложность определения скорости снижения вертолета, связанную с необходимостью изменения зоны обзора всех оптических передатчиков в пространстве (~ на 90°) от положения, когда они располагались в плоском угле 360° перпендикулярно вертикальной оси вертолета для решения задачи обнаружения объектов.
3. Способ и устройство принятые за прототип не обеспечивают посадку на наклонную поверхность.
4. Параметры отраженного сигнала зависят от рельефа местности, угла падения энергии, а при посадке на водную поверхность изменяются от балльности, появления брызг, изменения углов облучения по отношению к направлению волн, что делает невозможным применение способа при посадке на неровную поверхность.
Целью изобретения является создание автономного, помехозащищенного радиолокационного способа посадки вертолета с помощью пилота или автоматического устройства (автопилота) на горизонтальную, наклонную и неровную поверхность в сложных метеорологических условиях и при отсутствии визуальной видимости и малогабаритного устройства, осуществляющего этот способ. Поставленная цель изобретения достигается тем, что в способе посадки вертолета, включающим излучение и прием отраженных электромагнитных сигналов, определение скорости снижения вертолета, сравнение ее с заданной и выдачу информации в случае превышения заданного значения дополнительно осуществляют круговое сканирование поверхности, излучают и принимают отраженные радиолокационные сигналы в продольной и поперечной плоскостях относительно вертолета последовательно через 90°, измеряют протяженность облучаемых площадок в каждом из четырех положений диаграммы направленности, расположенных по две в продольной и поперечной плоскостях, вычисляют сигналы разностей полученных значений протяженностей облучаемых площадок в продольной и поперечной плоскостях, которые выводят на индикатор, формируют сигнал разрешения снижения при достижении равенства протяженностей площадок в продольной и поперечной плоскостях, в процессе снижения на основе измерений протяженности облучаемых площадок вычисляют значения интервала высот в каждый интервал времени равный одному обороту антенны по формуле:
ΔH=H1-H2,
где ΔH - интервал высот, пройденный вертолетом за один оборот антенны
H1 - высота вертолета в момент времени t1 в начале оборота антенны
H2 - высота вертолета в момент времени t2 в конце оборота антенны, где высота вертолета рассчитывается по формуле:
где H - высота вертолета
l - значение протяженности облучаемой площадки
α - угол наклона диаграммы направленности антенны относительно оси вращения
β - ширина диаграммы направленности антенны,
и используя значение вычисленного интервала высот, рассчитывают скорость снижения вертолета:

где V - скорость снижения вертолета
Δt - время одного оборота антенны.
Целесообразно, когда в способе посадки вертолета при круговом сканировании излучают и принимают отраженные радиолокационные сигналы в четырех плоскостях, последовательно через 45°, измеряют протяженность облучаемых площадок в каждом из восьми положений диаграммы направленности антенны, что позволит уменьшить интервал времени измерения скорости посадки в восемь раз.
Рекомендуется в способе посадки вертолета для минимального обужения зоны обзора в процессе снижения вертолета уменьшить угол наклона антенны до значения, равного половине ширины диаграммы направленности антенны.
В способе посадки вертолета, если вертолет оборудован автопилотом, все данные могут передаваться на автопилот.
Цель достигается тем, что в бортовой системе посадки вертолета, осуществляющей способ, содержащей антенну, соединенную с приемопередатчиком, а также формирователь сигнала разрешения снижения и схему сравнения, в нее дополнительно введены механически связанное с антенной устройство наклона, образующее совместно с антенной и приемопередатчиком антенное устройство, устройство вращения и датчик углового положения, механически связанные с антенным устройством, формирователь импульса протяженности облучаемой площадки, со входом которого связан выход приемопередатчика, а выход его соединен с третьим входом преобразователя длительность/код, выход преобразователя длительность/код соединен с первым входом оперативного запоминающего устройства, второй вход которого соединен с первым выходом синхронизатора и первым входом вычислителя скорости снижения, вход синхронизатора соединен с выходом датчика углового положения, а второй выход синхронизатора соединен со вторым входом приемопередатчика и первым входом преобразователя длительность/код, второй вход которого соединен с третьим выходом синхронизатора и вторым входом вычислителя скорости снижения, первый выход оперативного запоминающего устройства соединен с первым входом схемы вычитания в продольной плоскости и третьим входом вычислителя скорости снижения, второй выход оперативного запоминающего устройства соединен со вторым входом схемы вычитания в продольной плоскости и четвертым входом вычислителя скорости снижения, третий выход оперативного запоминающего устройства соединен с первым входом схемы вычитания в поперечной плоскости и пятым входом вычислителя скорости снижения, четвертый выход оперативного запоминающего устройства соединен со вторым входом схемы вычитания в поперечной плоскости и шестым входом вычислителя скорости снижения, а его седьмой вход соединен со входом устройства наклона и первым выходом индикатора, первый выход схемы вычитания в продольной плоскости соединен с первым входом формирователя сигнала разрешения снижения, а ее второй выход соединен с первым входом индикатора, первый выход схемы вычитания в поперечной плоскости соединен со вторым входом формирователя сигнала разрешения снижения, а ее второй выход со вторым входом индикатора, выход вычислителя скорости снижения соединен с третьим входом индикатора и первым входом схемы сравнения, а второй ее вход соединен со вторым выходом индикатора, выход схемы сравнения соединен с четвертым входом индикатора, а его пятый вход соединен с выходом формирователя сигнала разрешения снижения.
Из известного уровня техники не выявлены решения, имеющие признаки совпадающие с отличительными признаками предлагаемых технических решений. Поэтому можно считать, что предлагаемые технические решения соответствуют условию изобретательского уровня.
Радиолокационный способ посадки вертолета и устройство для его осуществления выгодно отличается от прототипа, ниже приводятся основные преимущества:
1. В предлагаемом способе и устройстве обеспечивается посадка вертолета не только на горизонтальную, но и на наклонную поверхность вследствие того, что при круговом сканировании поверхности излучают и принимают отраженные радиолокационные сигналы в продольной и поперечной плоскостях относительно вертолета последовательно через 90°, измеряют протяженность облучаемых площадок в каждом из четырех положений ДНА, расположенных по две в продольной и поперечной плоскостях, вычисляют сигналы разностей полученных значений протяженностей облучаемых площадок в продольной и поперечной плоскостях, которые выводят на индикатор или автопилот, формируют сигнал разрешения снижения при достижении равенства протяженностей площадок в продольной и поперечной плоскостях, в процессе снижения на основе измерений протяженности облучаемых площадок вычисляют значения интервала высот в каждый интервал времени, равный одному обороту антенны.
2. Контроль посадки вертолета может осуществляться в любое время суток в простых и сложных метеоусловиях, за счет использования радиолокационного диапазона.
3. Повышение помехозащищенности способа от воздействия активных и пассивных помех, расположенных в пределах облучаемой площадки и области ограниченной диаграммой направленности антенны, поскольку границы, и следовательно, начало и конец облучаемой площадки, не будут существенно нарушаться в зависимости от уровня и характера помеховых сигналов. Измеряемые сигналы, т.е. начало и конец облучаемой площадки не будут зависеть от несущей частоты, и параметров радиоимпульсов, длительности импульса, частоты повторения, поляризации, модуляции и т.п.
4. Одним из достоинств предлагаемого способа и устройства для его осуществления является то, что одновременно определяют высоту полета с помощью измерения протяженности облучаемых площадок, этот способ ранее никогда не использовался. Как известно измерение высоты полета вертолета выполняется с помощью дополнительного прибора - радиовысотомера, однако возможности его не всегда обеспечивают требуемые точности замера высоты полета, например, при необходимости посадки на взволнованную водную поверхность.
5. Обеспечивается возможность посадки вертолета на водную поверхность при различном волнении, появлении брызг, изменении углов облучения по отношению к направлению морских волн из-за снижения уровня помех и отсутствия флюктуации параметра «протяженность облучаемой площадки» лежащего в основе формирования траектории и вычисления скорости посадки вертолета.
6. В состав предлагаемой автономной системы входит одна антенна совмещенная с малогабаритным приемо-передатчиком, что обеспечивает снижение массогабаритных характеристик по сравнению с устройством принятым за прототип, в состав которого входит несколько десятков антенн, приемо-передатчиков и сложных связей между ними.
Таким образом, наличие новых факторов и признаков в совокупности с известными обеспечивает у заявляемого решения новые свойства не совпадающие со свойствами известных технических решений.
Сущность изобретения поясняется чертежами, где представлено:
Фиг.1. Расположение облучаемых площадок при круговом сканировании ДНА посадочной поверхности, имеющей наклон в продольной плоскости в режиме «висения» при отсутствии крена и тангажа вертолета.
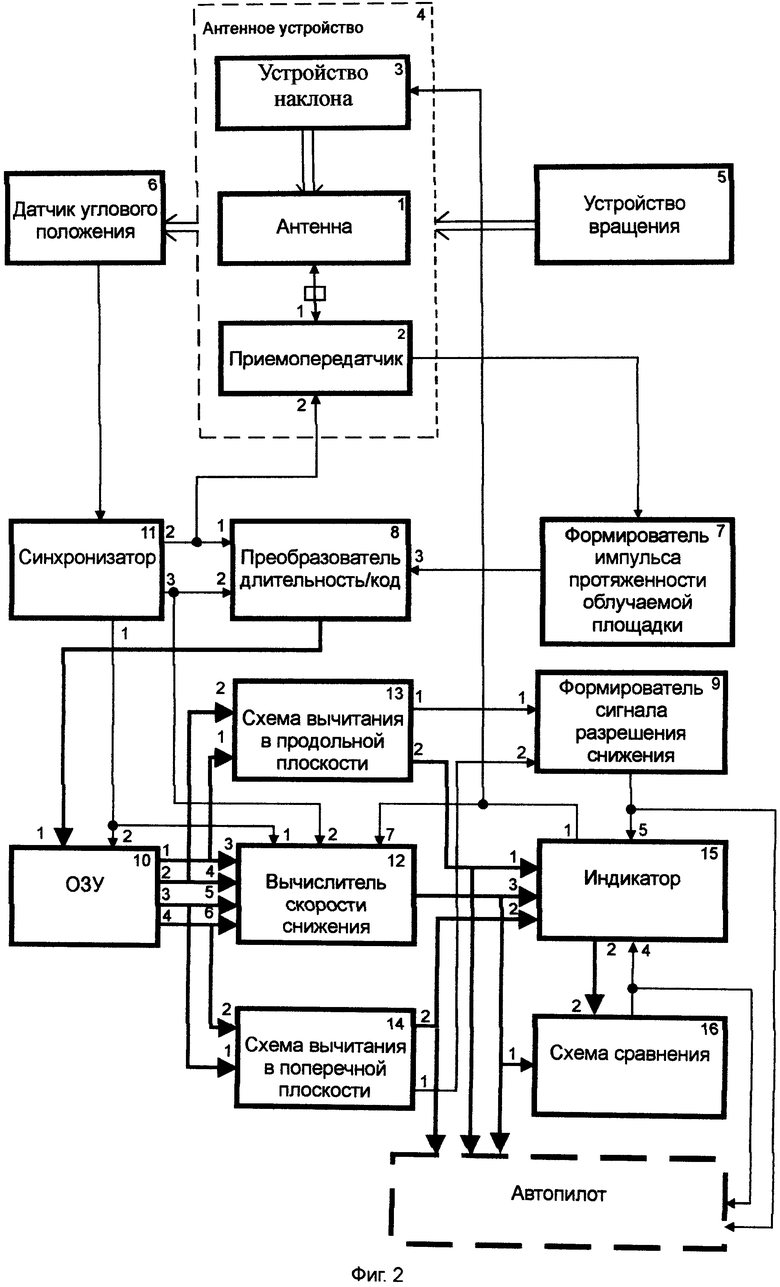
Фиг.2. Функциональная схема устройства, реализующая заявленный способ.
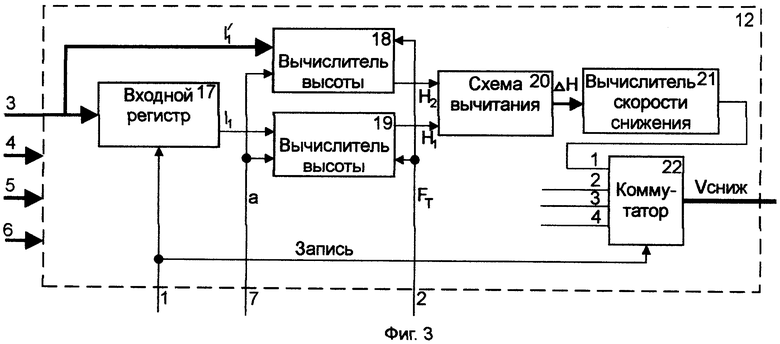
Фиг.3. Функциональная схема вычислителя скорости снижения.
Фиг.4. Положение вертолета в режиме «висения» перед посадкой на наклонную поверхность и расположение облучаемых площадок в продольной плоскости при отсутствии тангажа.
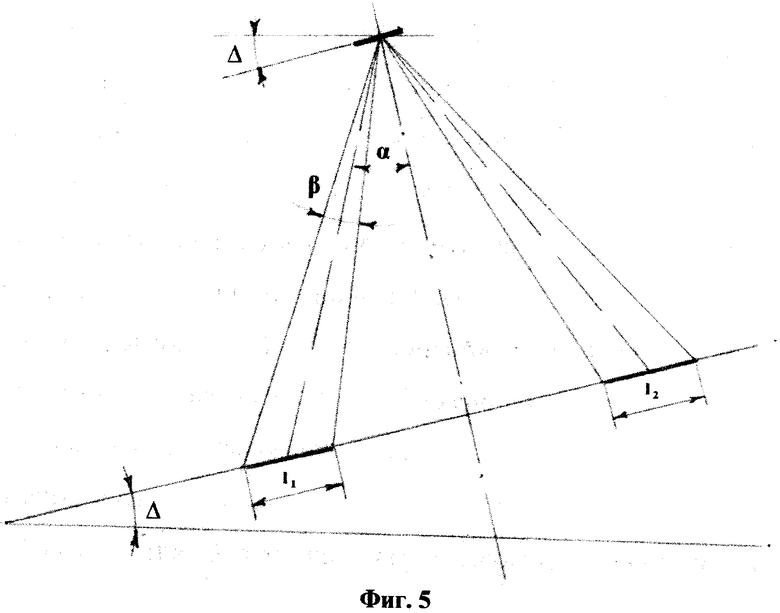
Фиг.5. Положение вертолета в режиме «висения» перед посадкой на наклонную поверхность и расположение облучаемых площадок в продольной плоскости при изменении угла тангажа.
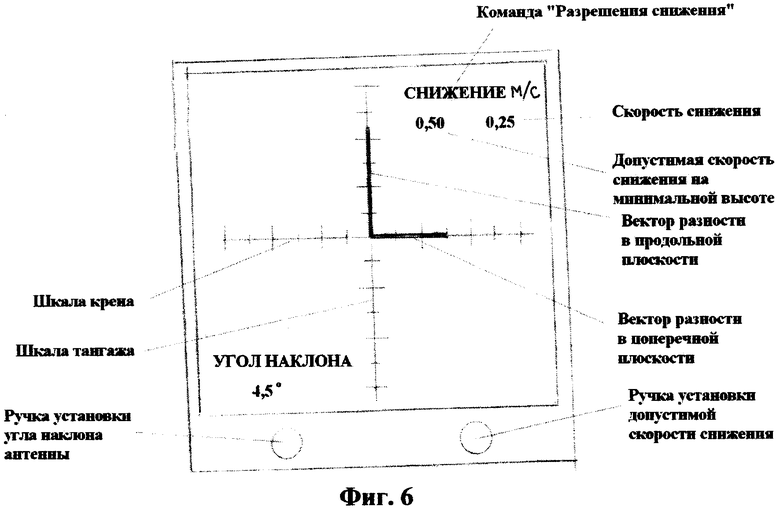
Фиг.6. Расположение экрана с отображаемой на нем информацией и ручек управления на передней панели индикатора.
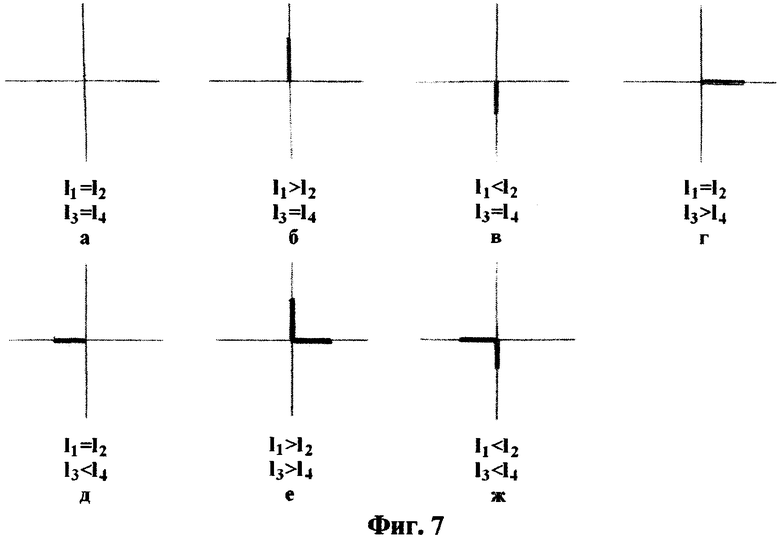
Фиг.7. Изображение на экране индикатора векторов разности в продольной и поперечной плоскостях в зависимости от протяженности облучаемых площадок.
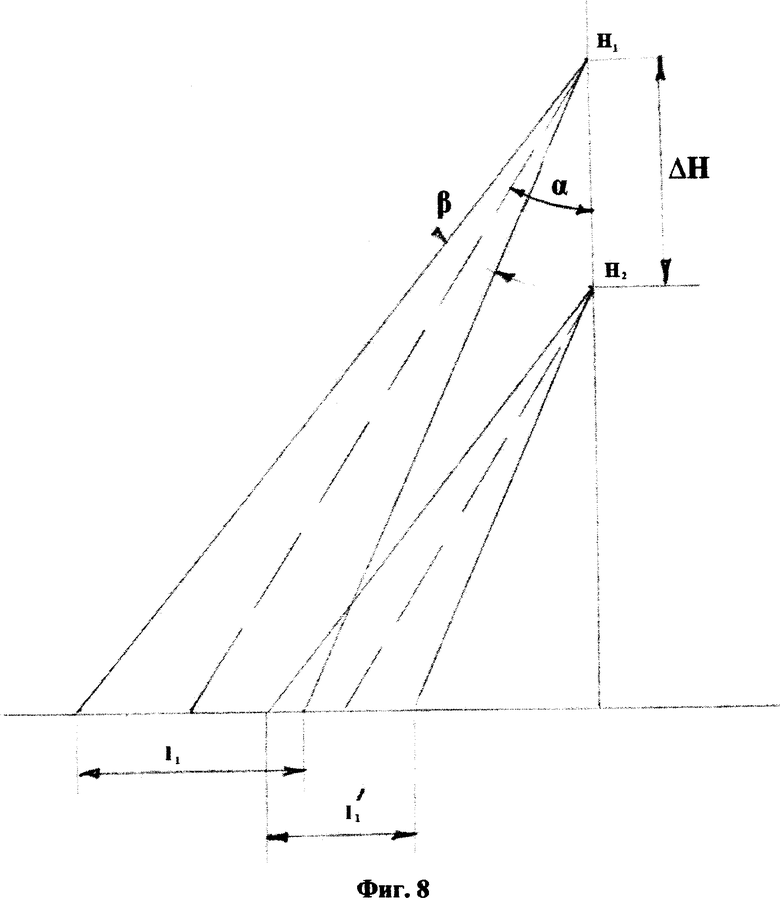
Фиг.8. Изменение протяженности облучаемой площадки при посадке в зависимости от высоты.
Предлагаемый способ характеризуется тем, что в режиме «висения» вертолета при отсутствии крена и тангажа с помощью вращающейся антенны, диаграмма направленности которой осуществляет круговое сканирование поверхности (фиг.1), излучают и принимают отраженные сигналы в продольной и поперечной плоскостях последовательно через 90°, устанавливают на высоте зависания Н угол наклона антенны α, определяющий зону обзора в пределах облучаемых площадок, измеряют протяженность облучаемых площадок в каждом из четырех положений диаграммы направленности расположенных по две в продольной и поперечной плоскостях, вычисляют сигналы разностей полученных значений протяженностей облучаемых площадок в продольной и поперечной плоскостях и используют их в качестве сигналов ошибок, которые выводятся на индикатор или автопилот и используются для изменения пространственного положения вертолета в обеих плоскостях, а при этом величина сигнала ошибок в каждой плоскости контролируется пилотом по индикатору или с помощью автопилота и при достижении нулевых значений сигналов ошибок в продольной и поперечной плоскостях формируют поступающий на индикатор или автопилот сигнал разрешения снижения вертолета из точки зависания для посадки со скоростью допустимой для каждого диапазона высот с учетом загрузки вертолета, центровки и т.п., а также формируют звуковые и световые сигналы для предупреждения пилота о начале и в процессе снижения вертолета, на основе измерений протяженности облучаемых площадок вычисляют значения интервала высот в каждый интервал времени равный одному обороту антенны по формуле:
ΔH=H1-H2,
где ΔH - интервал высот, пройденный вертолетом за один оборот антенны
H1 - высота вертолета в момент времени t1 в начале оборота антенны
H2 - высота вертолета в момент времени t2 в конце оборота антенны,
где высота вертолета рассчитывается по формуле:
где H - высота вертолета
l - значение протяженности облучаемой площадки
α - угол наклона диаграммы направленности антенны относительно оси вращения
β - ширина диаграммы направленности антенны.
и используя значение вычисленного интервала высот, рассчитывают скорость снижения вертолета:

где V - скорость снижения вертолета
Δt - время одного оборота антенны.
Значения скорости вертолета в вертикальной плоскости выводятся на экран индикатора или выводятся на автопилот.
Возможен вариант когда осуществляется излучение и прием отраженных сигналов, например, в каждом из 8 положений диаграммы направленности антенны, расположенных через 45°. При этом измеряют протяженность облучаемых площадок в каждом положении, вычисляют сигналы разностей полученных значений протяженностей облучаемых площадок в четырех плоскостях, в том числе в продольной и поперечной, при этом сигналы разностей в продольной и поперечной плоскостях используют для формирования сигнала разрешения снижения. Информация, полученная при обработке восьми облучаемых площадок позволяет уменьшить интервал времени измерения скорости посадки в восемь раз.
Предлагаемая система поясняется чертежом функциональной схемы, где на фиг.2 приведен пример выполнения схемы.
Антенна 1 соединена с приемопередатчиком 2, устройство наклона 3, механически связанное с антенной 1 и приемопередатчик 2 образуют антенное устройство 4, механически связанное с устройством вращения 5 и датчиком углового положения 6, выход приемопередатчика 2 соединен со входом формирователя импульса протяженности облучаемой площадки 7, выход которого соединен с третьим входом преобразователя длительность/код 8, выход преобразователя длительность/код 8 соединен с первым входом оперативного запоминающего устройства (ОЗУ) 10, второй вход которого соединен с первым выходом синхронизатора 11 и первым входом вычислителя скорости снижения 12, вход синхронизатора 11 соединен с выходом датчика углового положения 6, а второй выход синхронизатора 11 соединен со вторым входом приемопередатчика 2 и первым входом преобразователя длительность/код 8, второй вход которого соединен с третьим выходом синхронизатора 11 и вторым входом вычислителя скорости снижения 12, первый выход ОЗУ 10 соединен с первым входом схемы вычитания в продольной плоскости 13 и третьим входом вычислителя скорости снижения 12, второй выход ОЗУ 10 соединен со вторым входом схемы вычитания в продольно плоскости 13 и четвертым входом вычислителя скорости снижения 12, третий выход ОЗУ 10 соединен с первым входом схемы вычитания в поперечной плоскости 14 и пятым входом вычислителя скорости снижения 12, четвертый выход ОЗУ 10 соединен со вторым входом схемы вычитания в поперечной плоскости 14 и шестым входом вычислителя скорости снижения 12, а его седьмой вход соединен со входом устройства наклона 3 и первым выходом индикатора 15, первый выход схемы вычитания в продольной плоскости 13 соединен с первым входом формирователя сигнала разрешения снижения 9, а ее второй выход соединен с первым входом индикатора 15, первый выход схемы вычитания в поперечной плоскости 14 соединен со вторым входом формирователя сигнала разрешения снижения 9, а ее второй выход со вторым входом индикатора 15, выход вычислителя скорости снижения 12 соединен с третьим входом индикатора 15 и первым входом схемы сравнения 16, а второй ее вход соединен со вторым выходом индикатора 15, выход схемы сравнения 16 соединен с четвертым входом индикатора 15, а его пятый вход соединен с выходом формирователя сигнала разрешения снижения 9.
Формирователь импульса протяженности облучаемой площадки 7 может быть выполнен, например, на микросхеме 597СА3, представляющей собой компаратор, на один из входов которого подается видеосигнал с выхода приемопередатчика 2, а на другой пороговое напряжение, устанавливаемое выше уровня шумов приемника. При превышении видеосигналом порогового напряжения на выходе компаратора появляется логический сигнал, поступающий на вход преобразователя длительность/код 8.
Преобразователь длительность/код 8 может быть выполнен, например, на двоичном счетчике, состоящем из двух последовательно соединенных микросхем 1533ИЕ5, на вход которого через логический элемент И, на микросхеме 1533ЛИ1, поступают тактовые импульсы Fт с синхронизатора 11. На другой вход логического элемента И подается импульс протяженности облучаемой площадки с выхода формирователя импульса протяженности облучаемой площадки 7. Сброс счетчика осуществляется импульсом запуска передатчика (ИЗП), поступающим с выхода синхронизатора 11.
Формирователь сигнала разрешения снижения 9 представляет собой логический элемент ИЛИ, и может быть выполнен на микросхеме 1533ЛЛ1.
ОЗУ 10 может быть выполнено, например, на четырех микросхемах 1533ИР22 и представляет собой четыре регистра хранения с параллельным вводом информации. Информационные входы регистров соединены параллельно и на них подается код длительности облучаемой площадки с выхода преобразователя длительность/код 8. На входы синхронизации регистров подается четырехразрядный позиционный код углового положения антенны с выхода синхронизатора 11, по которому осуществляется запись в регистры кода длительности облучаемой площадки последовательно в каждом из четырех положений ДНА.
В состав синхронизатора 11 может входить формирователь ИЗП, выполненный, например, на микросхеме 1533АГ3, на вход которого поступают импульсы углового положения с датчика углового положения 6. Эти импульсы также поступают на входы последовательно соединенных двоичного счетчика, который может быть выполнен на микросхеме 1533ТМ2 и дешифратора на микросхеме 1533ЛИ1 с помощью которого формируется четырехразрядный позиционный код углового положения, который необходим для работы ОЗУ 10 и вычислителя скорости снижения 12. Для формирования тактовой частоты Fт, поступающей на преобразователь длительность/код 8 и вычислитель скорости снижения 12 может использоваться кварцевый генератор, выполненный на микросхеме 1533ЛН1.
Вычислитель скорости снижения 12 (фиг.3) может состоять, например, из четырех идентичных каналов обработки информации о протяженности облучаемых площадок l1-l4, каждый из которых может содержать входной регистр 17, на микросхеме 1533ИР22, запись информации в который осуществляется импульсом записи с первого выхода синхронизатора 11. Код протяженности облучаемой площадки со входа регистра 17 поступает на вход вычислителя высоты 18, а с выхода - на вход вычислителя высоты 19, на которые также поступает код угла наклона антенны. По данным протяженности облучаемой площадки l1 и углу наклона антенны вычислитель высоты 19 вычисляет высоту, на которой находился вертолет в начале периода сканирования, а вычислитель 18 вычисляет высоту в конце периода сканирования. Данные о высоте в начале и в конце периода сканирования поступают на схему вычитания 20, которая выполнена и работает аналогично схеме вычитания в продольной плоскости 13, на ее выходе образуется код разности высот, т.е. снижение за один период сканирования. Этот код поступает на вход вычислителя скорости снижения 21, который по данным разности высот и времени одного периода сканирования вычисляет скорость снижения. Эта информация поступает на первый вход коммутатора 22, на остальные входы которого поступают данные о скорости снижения с трех остальных каналов, полученные путем обработки информации о протяженности площадок l2-l4. Переключение каналов осуществляется импульсом записи с первого выхода синхронизатора 11, при этом в течении четверти периода сканирования с выхода коммутатора 22 будет выдаваться информация о скорости снижения, полученная путем последовательной обработки данных о протяженности облучаемых площадок l1-l4.
Схема вычитания в продольной плоскости 13 может состоять, например, из сумматора, выполненного на двух микросхемах 533ИМ3, на один вход которого подается код длительности облучаемой площадки l1, а на второй через преобразователь кода, выполненный на двух микросхемах 1533ЛН1 и двух микросхемах 533ИМ3, код длительности облучаемой площадки l2, находящихся в продольной плоскости. На выходе сумматора образуется код разности длительностей облучаемых площадок, который поступает на индикатор 15 или на автопилот. При равенстве кодов длительности облучаемых площадок, т.е. при нулевом коде разности, на выходе логического элемента ИЛИ, выполненного на микросхемах 1533ЛН1 и 1533ЛА2 образуется сигнал равенства площадок в продольной плоскости, поступающий на формирователь сигнала разрешения снижения 9.
Схема вычитания в поперечной плоскости 14 работает аналогично.
В состав индикатора 15 может входить устройство отображения информации выполненное, например, на основе цветной жидкокристаллической матрицы (ЖКМ), графический процессор, служащий для формирования на экране графической и цифробуквенной информации и ручки управления.
Схема сравнения 16 сравнивает коды текущей и допустимой скорости снижения, вырабатывает сигнал превышения допустимой скорости снижения и может быть выполнена на двух микросхемах 1533СП1.
Работа предлагаемой системы, осуществляющей способ, выполняется следующим образом (фиг.4). Перед посадкой вертолета, на наклонную поверхность, имеющую угол наклона Δ в режиме «висения» при отсутствии крена и тангажа, устройство вращения 5, механически связанное с антенным устройством 4, обеспечивает вращение устройства в горизонтальной плоскости, при этом антенна 1, входящая в состав антенного устройства 4, имеющая ширину ДНА в вертикальной плоскости β, осуществляет круговое сканирование поверхности. Угол наклона антенны α, определяющий зону обзора в пределах облучаемых площадок, изменяется с помощью механически связанного с антенной 1 устройства наклона 3, входящего в состав антенного устройства 4, на которое поступает устанавливаемый пилотом сигнал наклона антенны с индикатора 15. Антенна 1 и приемопередатчик 2, входящий также в состав антенного устройства 4, на который поступают ИЗП с синхронизатора 11, осуществляют излучение и прием отраженных сигналов в каждом из четырех положений ДНА (два в продольной и два в поперечной плоскости), которые определяются с помощью механически связанного с антенным устройством датчиком углового положения 6.
Видеосигнал с выхода приемопередатчика 2 поступает на формирователь импульса протяженности облучаемой площадки 7 состоящий из компаратора, на первый вход которого подается видеосигнал, а на второй вход подается пороговое напряжение, которое устанавливается выше уровня шумов приемника. Когда видеосигнал от площадки в пределах ДНА превысит пороговое напряжение на выходе компаратора появится импульс протяженности облучаемой площадки, т.е. логический сигнал, длительность которого будет пропорциональна протяженности облучаемой площадки.
Импульс протяженности облучаемой площадки поступает на вход преобразователя длительность/код 8, который состоит из временного селектора на логическом элементе И, выход которого соединен со входом двоичного счетчика. На один вход логического элемента И поступают тактовые импульсы Fт с синхронизатора 11, а на другой вход подается импульс протяженности облучаемой площадки, за время действия которого двоичный счетчик производит отсчет тактовых импульсов и на его выходе образуется код длительности облучаемой площадки, поступающий в ОЗУ 10. Сброс счетчика осуществляется импульсом ИЗП, поступающим с синхронизатора 11.
Формирователь сигнала разрешения снижения 9 представляет собой логический элемент ИЛИ на входы которого поступают сигналы равенства площадок, а на выходе которого формируется сигнал разрешения снижения при условии, что протяженности облучаемых площадок равны одновременно в продольной и поперечной плоскости. Сигнал разрешения снижения поступает на индикатор 15 или автопилот, а также на формирователь звукового сигнала предупреждения пилота.
ОЗУ 10 состоит из четырех регистров хранения с параллельным вводом информации, информационные входы D которых соединены параллельно и на них подается код длительности облучаемой площадки с выхода преобразователя длительность/код 8. На входы синхронизации C регистров подается четырехразрядный позиционный код с выхода синхронизатора 11, с помощью которого осуществляется запись в регистры кода длительности облучаемой площадки последовательно в каждом из четырех положений ДНА. Коды длительности облучаемых площадок l1 и l2 поступают соответственно на входы 1 и 2 схемы вычитания в продольной плоскости 13, l3 и l4 соответственно на входы 1 и 2 схемы вычитания в поперечной плоскости 14.
В состав синхронизатора 11 входит формирователь ИЗП, представляющий собой ждущий мультивибратор, который формирует из поступающих на него импульсов углового положения с выхода датчика углового положения 6, импульсы, имеющие параметры, необходимые для запуска приемопередатчика 2.
Импульсы углового положения поступают также на вход последовательно соединенных двухразрядного двоичного счетчика и дешифратора, на выходе которого формируется четырехразрядный позиционный код углового положения. Наличие импульса на каждом из четырех выходов дешифратора соответствует нахождению ДНА в одном из четырех секторов, расположенных между положениями ДНА, при которых производится облучение площадок, а длительность импульса определяется временем перемещения ДНА из положения, когда облучалась одна площадка к положению в котором облучалась следующая площадка, что соответствует ¼ периода сканирования ДНА. Эти импульсы используются как импульсы записи информации о протяженности облучаемой площадки в ОЗУ 10, а также необходимы для работы вычислителя скорости снижения 12.
Для формирования тактовой частоты Fт, необходимой для работы преобразователя длительность/код 8 и вычислителя скорости снижения 12 используется кварцевый генератор, представляющий собой автоколебательный мультивибратор, состоящий из последовательно соединенных инверторов, в цепь обратной связи которых включен кварцевый резонатор, определяющий частоту генерации.
Для определения скорости снижения вертолета используется вычислитель скорости снижения 12 (фиг.3), имеющий четыре одинаковых канала обработки, на входы которых поступают коды длительности облучаемых площадок с выхода ОЗУ 10, импульсы записи и тактовая частота с выхода синхронизатора 11, а также код угла наклона антенны из индикатора 15. Во время снижения, когда вертолет находится на высоте H1 (фиг.8), а ДНА находится в угловом положении, обеспечивающим облучение одной из площадок, например l1, в начале периода сканирования, на вход 3 вычислителя скорости снижения 12 поступает код длительности этой площадки, который записывается в его входной регистр 17 и хранится в нем до поступления новой информации о протяженности облучаемой площадки 

H1 - высота вертолета в начале периода сканирования,
H2 - высота вертолета в конце периода сканирования,
l1 - протяженность облучаемой площадки в начале периода сканирования,
α - угол наклона антенны относительно оси вращения,
β - ширина ДНА.
Данные о высоте вертолета в начале периода сканирования H1 и в конце периода сканирования H2, то есть за время одного оборота антенны, поступают на входы схемы вычитания 20, которая выполнена и работает аналогично схеме вычитания в продольной плоскости 13, на выходе которой формируется код разности высот ΔH=H1-H2, который соответствует пути, пройденному вертолетом при посадке за один период сканирования. Этот код поступает на вход вычислителя скорости снижения 21, который по данным разности высот ΔH и времени одного периода сканирования tскан вычисляет скорость снижения 
Эта информация поступает на первый вход коммутатора 22, на входы 2-4 которого поступают данные о скорости снижения с трех остальных каналов, полученные путем обработки информации о протяженности площадок l2-l4, которые работают аналогично. Переключение каналов осуществляется импульсом записи с первого выхода синхронизатора 11, при этом в течении четверти периода сканирования с выхода коммутатора 22 будет выдаваться информация о скорости снижения, полученная путем последовательной обработки данных о протяженности облучаемых площадок l1-l4. Обновление информации о скорости снижения, полученной при обработке данных о протяженности одной из облучаемых площадок, будет происходить через отрезок времени, равный времени одного периода сканирования (одного оборота антенны).
Схема вычитания в продольной плоскости 13 состоит из сумматора, на один вход которого поступает код длительности облучаемой площадки l1 с выхода 1 ОЗУ 10, а на второй вход поступает код с выхода преобразователя кода, на вход которого поступает код длительности облучаемой площадки l2 с выхода 2 ОЗУ 10. Преобразователь кода преобразует код длительности облучаемой площадки l2 в дополнительный код, который с помощью сумматора суммируется с кодом длительности облучаемой площадки l1, в результате на выходе сумматора образуется код разности облучаемых площадок в продольной плоскости, который поступает на первый вход индикатора 15 и на вход логического элемента ИЛИ. При равенстве кодов длительности облучаемых площадок l1 и l2, т.е. при нулевом коде разности, на выходе логического элемента ИЛИ образуется сигнал равенства площадок в продольной плоскости, который поступает на первый вход формирователя сигнала разрешения снижения 9.
Схема вычитания в поперечной плоскости 14 работает аналогично.
Индикатор 15 (фиг.6) состоит из устройства отображения информации на основе цветной ЖКМ, графического процессора и ручек управления.
Коды разности облучаемых площадок (сигналы ошибок) выводятся на устройство отображения информации в виде линий (векторов) расположенных по осям прямоугольной системы координат от центра к краю изображения, длина которых пропорциональна разности протяженностей облучаемых площадок, а направление зависит от соотношения протяженности этих площадок. Так как протяженности облучаемых площадок зависят от угла наклона антенны, угла наклона посадочной площадки и пространственного положения вертолета, т.е. зависят от крена (в поперечной плоскости) и тангажа (в продольной плоскости), то будем считать ось Х шкалой крена, а ось Y шкалой тангажа.
Наблюдая изображение векторов на экране индикатора пилот может изменять пространственное положение вертолета (меняя углы крена и тангажа) таким образом, при котором длины векторов будут равны нулю (фиг.7а), т.е. добиваясь равенства облучаемых площадок в продольной и поперечной плоскостях, при котором выдается команда разрешения снижения и на экране появляется надпись «СНИЖЕНИЕ».
Если вектор разности в продольной плоскости расположен в положительной части шкалы тангажа (от центра вверх) (фиг.7б), т.е. разность протяженностей облучаемых площадок l1-l2 положительна (l1>l2), то для обеспечения равенства площадок пилоту необходимо увеличить угол тангажа на величину Δ (фиг.5), при этом длина вектора на экране будет уменьшаться и при равенстве площадок будет равна нулю.
Если вектор разности в продольной плоскости расположен в отрицательной части шкалы тангажа (от центра вниз) (фиг.7в), т.е. разность протяженностей облучаемых площадок l1-l2 отрицательна (l1<l2), то для обеспечения равенства площадок пилоту необходимо уменьшить угол тангажа, при этом длина вектора на экране будет уменьшаться и при равенстве площадок будет равна нулю.
Если вектор в поперечной плоскости расположен в положительной части шкалы крена (от центра вправо) (фиг.7г), т.е. разность протяженностей облучаемых площадок l3-l4 положительна (l3>l4), то для обеспечения равенства площадок пилоту необходимо увеличить угол крена, при этом длина вектора на экране будет уменьшаться и при равенстве площадок будет равна нулю.
Если вектор разности в поперечной плоскости расположен в отрицательной части шкалы крена (от центра влево) (фиг.7д), т.е. разность протяженностей облучаемых площадок l3-l4 отрицательна (l3<l4), то для обеспечения равенства площадок пилоту необходимо уменьшить угол крена, при этом длина вектора на экране будет уменьшаться и при равенстве площадок будет равна нулю.
Если протяженности облучаемых площадок не равны одновременно в продольной и поперечной плоскостях, то одновременно будут наблюдаться два вектора разности (фиг.7е, ж), длина которых будет зависеть от разности, а расположение от соотношения протяженностей облучаемых площадок.
Так как длины векторов разности в продольной и поперечной плоскостях зависят от угла наклона антенны, угла наклона посадочной поверхности и пространственного положения вертолета, а для осуществления посадки требуется изменение углов крена и тангажа, то на соответствующую шкалу могут быть нанесены численные значения углов. Таким образом по длине вектора на соответствующей шкале пилот может определить на какую величину он должен изменить угол крена и тангажа, а по его направлению может определить нужно увеличить или уменьшить соответствующий угол, чтобы обеспечить равенство облучаемых площадок в продольной и поперечной плоскостях для осуществления посадки.
На передней панели индикатора расположены ручки управления, с помощью которых устанавливаются угол наклона антенны и допустимая скорость снижения.
Схема сравнения 16 сравнивает код текущей скорости снижения с выхода вычислителя скорости снижения 12 с кодом допустимой скорости снижения, поступающим из индикатора 15. Когда код текущей скорости снижения превышает код допустимой скорости снижения, на выходе схемы сравнения 16 вырабатывается сигнал превышения допустимой скорости снижения, который поступает на четвертый вход индикатора 15, а также используется для формирования звукового сигнала предупреждения пилота или поступает на автопилот.
Для увеличения объема получаемой информации возможно излучать и принимать отраженные радиолокационные сигналы в четырех плоскостях, последовательно через 45°, измерять протяженность облучаемых площадок в каждом из восьми положений ДНА, расположенных по две в каждой плоскости.
При оборудовании вертолета посадочной РЛС с электронным сканированием, обладающей возможностью быстрого вращения диаграммы направленности антенны, возможно для определения скорости снижения вертолета фиксировать время равное одному или нескольким положениям диаграммы направленности с дальнейшим накоплением и усреднением полученных результатов измерений.
Как только авиация перешла от простых визуальных полетов к приборному пилотированию в сложных метеоусловиях, при отсутствии видимости естественного горизонта и наземных ориентиров, остро встала проблема выполнения посадки как на горизонтальные, так и на наклонные поверхности малых размеров. При расположении посадочной площадки, например, вблизи отвесных скал, оврагов, ущелий, горных хребтов или необходимости посадки на объекты типа «буровая платформа» необходимо для минимального обужения зоны обзора в процессе снижения вертолета уменьшить угол наклона антенны до значения, равного половине ширины ДНА.
Реализация предлагаемого радиолокационного способа и устройства позволяет обеспечить безопасность посадки и регулярность полетов вертолетов за счет следующих факторов:
1. Возможность посадки в любое время суток в простых и сложных метеоусловиях, в том числе на необорудованные площадки.
2. Радиолокационное устройство посадки вертолета является автономным устройством.
3. Обеспечение посадки не только на горизонтальную, но и на наклонную поверхность, а также на водную поверхность.
4. Помехозащищенность радиолокационной системы от активных и пассивных помех.
5. Малая масса и габариты системы, что обеспечивает возможность оборудования широкого класса вертолетов, включая беспилотные.
6. Вертолет, оборудованный предлагаемой системой будет обеспечивать регулярность полетов и, следовательно, экономический эффект при эксплуатации.

Изобретение относится к области радиолокационной техники и может быть использовано для создания автоматических систем посадки и взлета беспилотных вертолетов. Технический результат заключается в обеспечении возможности автономной посадки вертолета на горизонтальную, наклонную и неровную поверхность в условиях отсутствия оптической видимости и в сложных метеорологических условиях. Для этого осуществляют круговое сканирование поверхности, излучают и принимают отраженные сигналы в продольной и поперечной плоскостях относительно вертолета последовательно через 90°, измеряют протяженность облучаемых площадок, расположенных по две в продольной и поперечной плоскостях, вычисляют сигналы разностей полученных значений в каждой плоскости, которые выводят на индикатор, формируют сигнал разрешения снижения при равенстве протяженностей площадок в продольной и поперечной плоскостях, в процессе снижения на основе измерения протяженностей облучаемых площадок вычисляют вертикальную скорость вертолета. Предлагаемый радиолокационный способ позволяет осуществить также выдачу сигнала разрешения снижения и измерение вертикальной скорости снижения, а также имеет высокую помехозащищенность. 2 н. и 3 з.п. ф-лы, 8 ил.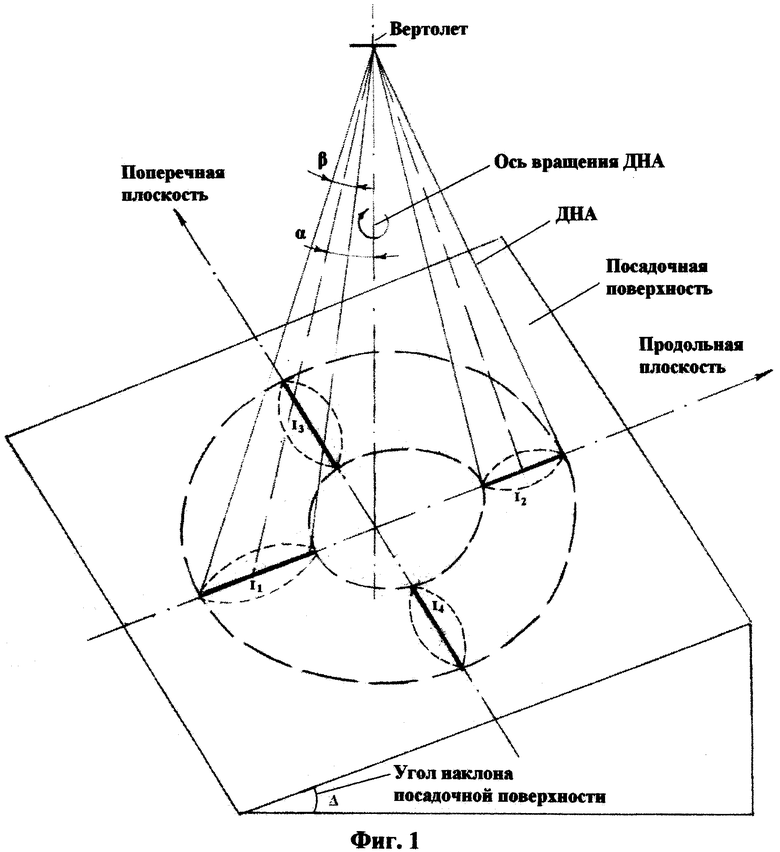
1. Способ посадки вертолета, включающий излучение и прием отраженных электромагнитных сигналов, определение скорости снижения вертолета, сравнение ее с заданной и выдачу информации в случае превышения заданного значения, отличающийся тем, что осуществляют круговое сканирование поверхности, излучают и принимают отраженные радиолокационные сигналы в продольной и поперечной плоскостях относительно вертолета последовательно через 90°, измеряют протяженность облучаемых площадок в каждом из четырех положений диаграммы направленности, расположенных по две в продольной и поперечной плоскостях, вычисляют сигналы разностей полученных значений протяженностей облучаемых площадок в продольной и поперечной плоскостях, которые выводят на индикатор, формируют сигнал разрешения снижения при достижении равенства протяженностей площадок в продольной и поперечной плоскостях, в процессе снижения на основе измерений протяженности облучаемых площадок вычисляют значения интервала высот в каждый интервал времени, равный одному обороту антенны по формуле:
ΔH=H1-H2,
где ΔH - интервал высот, пройденный вертолетом за один оборот антенны,
H1 - высота вертолета в момент времени t1 в начале оборота антенны,
H2 - высота вертолета в момент времени t2 в конце оборота антенны,

где H - высота вертолета,
l - значение протяженности облучаемой площадки,
α - угол наклона диаграммы направленности антенны относительно оси вращения,
β - ширина диаграммы направленности антенны;
и используя значение вычисленного интервала высот, рассчитывают скорость снижения вертолета:

где: V - скорость снижения вертолета,
Δt - время одного оборота антенны.
2. Способ посадки вертолета по п.1, отличающийся тем, что при круговом сканировании излучают и принимают отраженные радиолокационные сигналы в четырех плоскостях, последовательно через 45°, измеряют протяженность облучаемых площадок в каждом из восьми положений диаграммы направленности антенны, что позволит уменьшить интервал времени измерения скорости посадки в восемь раз.
3. Способ посадки вертолета по п.1 и/или 2, отличающийся тем, что для минимального обужения зоны обзора в процессе снижения вертолета уменьшают угол наклона антенны до значения, равного половине ширины диаграммы направленности антенны.
4. Способ посадки вертолета по пп.1, 2, 3, отличающийся тем, что при оборудовании вертолета автопилотом все данные могут передаваться на автопилот.
5. Бортовая система посадки вертолета, осуществляющая способ по п.1, содержащая антенну, соединенную с приемопередатчиком, а также формирователь сигнала разрешения снижения и схему сравнения, отличающаяся тем, что в нее дополнительно введены механически связанное с антенной устройство наклона, образующее совместно с антенной и приемопередатчиком антенное устройство, устройство вращения и датчик углового положения, механически связанные с антенным устройством, формирователь импульса протяженности облучаемой площадки, со входом которого связан выход приемопередатчика, а выход его соединен с третьим входом преобразователя длительность/код, выход преобразователя длительность/код соединен с первым входом оперативного запоминающего устройства, второй вход которого соединен с первым выходом синхронизатора и первым входом вычислителя скорости снижения, вход синхронизатора соединен с выходом датчика углового положения, а второй выход синхронизатора соединен со вторым входом приемопередатчика и первым входом преобразователя длительность/код, второй вход которого соединен с третьим выходом синхронизатора и вторым входом вычислителя скорости снижения, первый выход оперативного запоминающего устройства соединен с первым входом схемы вычитания в продольной плоскости и третьим входом вычислителя скорости снижения, второй выход оперативного запоминающего устройства соединен со вторым входом схемы вычитания в продольной плоскости и четвертым входом вычислителя скорости снижения, третий выход оперативного запоминающего устройства соединен с первым входом схемы вычитания в поперечной плоскости и пятым входом вычислителя скорости снижения, четвертый выход оперативного запоминающего устройства соединен со вторым входом схемы вычитания в поперечной плоскости и шестым входом вычислителя скорости снижения, а его седьмой вход соединен со входом устройства наклона и первым выходом индикатора, первый выход схемы вычитания в продольной плоскости соединен с первым входом формирователя сигнала разрешения снижения, а ее второй выход соединен с первым входом индикатора, первый выход схемы вычитания в поперечной плоскости соединен со вторым входом формирователя сигнала разрешения снижения, а ее второй выход со вторым входом индикатора, выход вычислителя скорости снижения соединен с третьим входом индикатора и первым входом схемы сравнения, а второй ее вход соединен со вторым выходом индикатора, выход схемы сравнения соединен с четвертым входом индикатора, а его пятый вход соединен с выходом формирователя сигнала разрешения снижения.
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА И ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384862C2 |
| УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ВЕРТОЛЕТА | 2006 |
|
RU2322683C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2363009C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ВЫСОТЫ И МЕСТНОЙ ВЕРТИКАЛИ ДЛЯ ВЕРТОЛЕТОВ И КОСМИЧЕСКИХ АППАРАТОВ ВЕРТИКАЛЬНОЙ ПОСАДКИ | 1995 |
|
RU2083998C1 |
| US 20100228408 A1, 09.09.2010 | |||

