Изобретение относится к навигационной аппаратуре, которая предназначена для контроля пространственного положения траектории ствола обсаженных и необсаженных скважин в процессе их строительства.
Известен способ определения азимута и зенитного угла скважины (патент РФ №2100594, Е 21 В 47/02, приор. 09.02.1996, опубл. 27.12.1997), включающий измерение ускорения силы тяжести по двум взаимно перпендикулярным осям, измерение угловой скорости относительно одной из вышеназванных осей посредством трехстепенного гироскопа, определение начальной ориентации осей чувствительности измерителей ускорения в азимуте, вычисление азимута и зенитного угла скважины, при котором оси чувствительности измерителей ускорений и ось чувствительности измерителя угловой скорости стабилизируют относительно оси, совпадающей с продольной осью скважинного прибора, на каждом шаге работы вычислителя при движении скважинного прибора в скважине определяют азимут и зенитный угол скважины по формулам. Измерения производятся в режиме непрерывного движения скважинного прибора.
Недостатком известного способа является недостаточный диапазон измерений азимутального угла, ограниченный зенитным углом 75.0 град.
Известен гироскопический инклинометр (патент РФ №2100594, Е 21 В 47/02, приор. 09.02.1996, опубл. 27.12.1997), состоящий из скважинного прибора, наземного пульта и вычислителя, соединенных геофизическим кабелем, причем скважинный прибор содержит одноосный стабилизатор, на котором установлены два измерителя ускорений с взаимно перпендикулярными осями чувствительности, расположенными также перпендикулярно оси стабилизатора, и трехстепенной гироскоп. Одноосный стабилизатор обеспечивает стабилизацию чувствительных элементов при вращении скважинного прибора вокруг продольной оси.
Недостатками известного гироскопического инклинометра являются сложность конструкции скважинного прибора, ограниченный диапазон измерений азимутального угла, а также необходимость начальной выставки гироинклинометра перед измерениями в скважине с помощью специального оборудования.
Известен способ определения азимута и зенитного угла скважины (патент РФ №2159331, Е 21 В 47/022, пр. 05.10.99, опубл. 20.11.2000 года), выбранный в качестве прототипа, включающий измерение ускорения силы тяжести по двум взаимно перпендикулярным осям посредством акселерометров, измерение угловой скорости относительно одной из измерительных осей посредством трехстепенного гироскопа, измерение температуры внутри скважинного прибора, стабилизацию осей чувствительности акселерометров и трехстепенного гироскопа относительно оси, совпадающей с продольной осью скважинного прибора посредством одноосного гиростабилизатора, измерение угла поворота корпуса скважинного прибора относительно этих осей посредством синусно-косинусного вращающегося трансформатора, определение начальной ориентации осей чувствительности акселерометров в азимуте, измерение длительности такта работы, нормирование информации гироскопа, акселерометров и датчика угла поворота, формирование управляющих воздействий на гироскоп по стабилизированной оси, введение добавок, компенсирующих дрейф одноосного гиростабилизатора, формирование матрицы ориентации, вычисление на каждом такте работы вычислителя при движении скважинного прибора в скважине азимута и зенитного угла по формулам.
Недостатком известного способа является то, что измеряют угловую скорость относительно одной из измерительных осей посредством гироскопа при непрерывном движении, что увеличивает погрешности измерений вследствие вибраций гироскопа в процессе движения скважинного прибора, кроме того, при использовании способа необходима начальная выставка прибора.
Для использования этого способа требуется сложная конструкция скважинного прибора - реализация стабилизированной платформы, на которую устанавливаются чувствительные элементы - гироскоп и акселерометры. Реализация стабилизированной платформы приводит к увеличению себестоимости прибора, снижает его надежность и ремонтопригодность.
Стабилизированная платформа устраняет пространственное вращение чувствительных элементов от вращения корпуса скважинного прибора, возникающее под действием закрученного геофизического кабеля, стабилизирует пространственное положение чувствительных элементов при непрерывном движении скважинного прибора.
Известен также гироинклинометр (патент №2078204, Е 21 В 47/02, опубл. БИ №12 - 1997 г.), включающий многокомпонентный акселерометр, блок двухкомпонентного гироскопического датчика угловой скорости (ДУС), трехстепенной гироскоп с датчиком угла по внешней оси, причем соответствующие оси чувствительности двухкомпонентного ДУС и акселерометров параллельны между собой и перпендикулярны продольной оси скважинного прибора, по которой также направлена внешняя ось трехстепенного гироскопа.
Гироинклинометр не требует начальной выставки в устье скважины и работает в режиме непрерывного движения. По существу он является также двухрежимным прибором, но режим аналитического гирокомпасирования обеспечивается блоком акселерометров и блоком двухкомпонентного ДУС, а измерения в режиме движения обеспечиваются блоком акселерометров и трехстепенным гироскопом, положение главной оси которого в азимуте определяется во время работы двухкомпонентного ДУС и запоминается ПЭВМ.
При непрерывном движении трехстепенной гироскоп работает в режиме свободного гироскопа.
Высокая производительность измерений известным гироинклинометром обеспечивается избыточным количеством гироскопических чувствительных элементов, что увеличивает массогабаритные характеристики прибора и его себестоимость.
Известен гироскопический инклинометр (патент РФ N 2130118, приоритет от 30.04.97 года, опубл. БИ №13-1999 г.), взятый в качестве прототипа, который для измерения параметров искривления скважины содержит наземный прибор, соединенный каротажным кабелем со скважинным прибором, состоящим из магнитосферического гироскопа, аналого-цифрового преобразователя и приемопередающего устройства, обеспечивающих передачу по геофизическому кабелю через наземный прибор в ПЭВМ измеренной информации в виде трех проекций ускорения силы тяжести и двух проекций скорости вращения скважинного прибора в инерциальном пространстве на оси приборной системы координат. Этот гироскопический инклинометр работает только на остановках в режиме многоточечных измерений.
Недостатком известного гироскопического инклинометра является низкая производительность измерений, а схемно-алгоритмическое построение обеспечивает его точные характеристики только при остановках скважинного прибора. Гироинклинометр бесплатформенной структуры при измерениях на высоких скоростях движения имеет большие динамические погрешности.
При измерениях траектории скважины глубиной 3 000 м с дискретностью 10 метров таким многоточечным прибором необходимо затратить около 15 часов времени (300 точек измерений по 3 минуты стоянки на каждой точке с учетом времени движения между точками).
Задача изобретения - повышение точности и производительности измерений траектории скважины двухрежимным бесплатформенным гироскопическим инклинометром при его непрерывном движении в скважине и вращении вокруг продольной оси под действием закрученного геофизического кабеля.
Поставленная задача решается тем, что в способе измерения траектории скважины по азимуту двухрежимным бесплатформенным инклинометром, включающем измерение проекций ускорения силы тяжести на измерительные оси скважинного прибора, проекций угловой скорости вращения Земли на соответствующие оси чувствительности скважинного прибора, измерение угла отклонителя скважинного прибора при его непрерывном движении и вращении вокруг продольной оси под действием закрученного геофизического кабеля, в первой точке измерения азимута траектории скважины гироскоп включают в режим датчика угловой скорости на остановке и определяют азимут скважины, например, по формуле:

ψ - широта места расположения скважины;
ω - угловая скорость вращения Земли;
ωх, ωу - проекции угловой скорости вращения Земли на соответствующие оси чувствительности скважинного прибора;
gx, gy, gz - проекции ускорения силы тяжести на измерительные оси скважинного прибора;
затем по команде с пульта оператора переводят гироскоп в режим датчика угла, а скважинный прибор - в режим непрерывного движения, при котором производят измерение углов прокачки, и определяют приращение углов прокачки между тактами измерений по формуле:

Δαi ' - приращение угла прокачки между тактами измерений;
α1 - значения углов прокачки, пересчитанные к углу отклонителя, равному, например, 90.0 град, полученные в первом такте;
αi - значения углов прокачки, пересчитанные к углу отклонителя, равному, например, 90.0 град, полученные в последующих тактах;
i - номер такта измерения, начиная со второго измерения;
затем из полученного приращения угла прокачки по оси Х вычитают величину угла видимого ухода гироскопа от вращения Земли и получают приращение угла прокачки по оси Х за счет искривления траектории скважины:

Δαi " - изменение угла прокачки по оси Х за счет вращения Земли в течение такта работы вычислителя;
причем приращение угла прокачки по оси Х от вращения Земли получают по формуле (4):

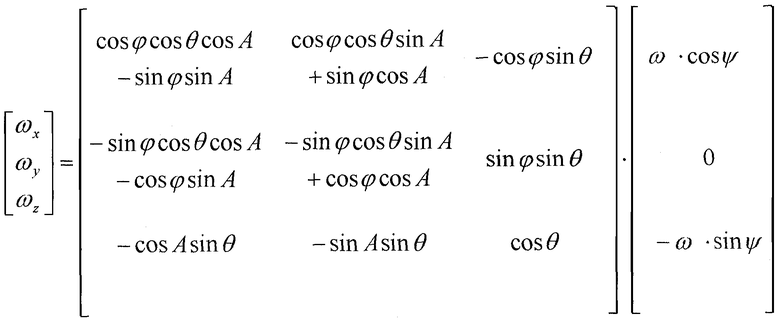
а составляющие угловых скоростей получают по формуле (5):
где:
α, β - углы прокачки по осям X и Y соответственно;
Δt - длительность такта;
А - азимут траектории скважины в точке съема измеренной информации;
θ - зенитный угол траектории в точке съема измеренной информации;
ϕ - угол отклонителя скважинного прибора в момент съема измеренной информации;
а изменение азимута траектории скважины уточняют в соответствии с функциональной зависимостью, полученной при калибровке инклинометра на стенде,

затем приращение азимутального угла ΔАi суммируют с полной величиной азимута, полученной на остановке в предыдущей точке траектории, и непрерывное движение скважинного прибора осуществляют до тех пор, пока величины углов прокачки не достигнут максимально допустимых значений, затем скважинный прибор останавливают, гироскоп переводят в режим датчика угловой скорости и вновь определяют полную величину азимута траектории скважины, и так попеременно используя режимы работы гироскопа, измеряют траекторию скважины любой кривизны.
Поставленная задача достигается тем, что в бесплатформенный гироскопический инклинометр, содержащий наземный прибор, соединенный каротажным кабелем с скважинным прибором, содержащим магнитосферический гироскоп, включающий датчики угла - датчики момента по двум измерительным осям, последовательно соединенные блок выработки составляющих ускорения и передающее устройство, введены два блока управления режимами работы гироскопа по осям Х и Y, первый и второй входы каждого из которых соединены соответственно с выходом передающего устройства и управляющими выходами магнитосферического гироскопа, а выходы подключены к информационным входам передающего устройства, при этом каждый из блоков управления содержит электронный коммутатор, преобразователь напряжения обратной связи, первый и второй сумматоры напряжений, два источника тока для питания двух обмоток датчика угла - датчика момента, дифференциальный усилитель, полосовой фильтр, фазочувствительный выпрямитель и интегродифференцирующее звено, причем первые входы электронных коммутаторов являются первыми входами блоков управления, второй вход электронного коммутатора по оси Х соединен с выходом интегродифференцирующего звена по оси Y, а второй вход электронного коммутатора по оси Y - с выходом интегродифференцирующего звена по оси X, выход электронного коммутатора каждого блока управления соединен через преобразователь напряжения обратной связи с входами сумматоров, выходы которых соединены с первыми входами источников тока, вторые входы которых подключены к входам соответствующих обмоток датчиков угла - датчиков момента, выходы которых соединены с входами дифференциального усилителя, выход которого подключен через полосовой фильтр к входу фазочувствительного выпрямителя, выход которого соединен с входом интегродифференцирующего звена, причем выходы фазочувствительного выпрямителя и интегродифференцирующего звена являются выходами устройств управления режимами работы магнитосферического гироскопа.
Наличие указанных признаков позволяет сделать вывод о новизне технического решения.
При сравнении заявленного решения с другими техническими решениями в данной области техники не выявлена совокупность признаков, отличающих заявленное решение от прототипа, что позволяет сделать вывод о соответствии технического решения критерию "изобретательский уровень".
Таким образом, заявленное решение является новым, имеет изобретательский уровень, промышленно применимо.
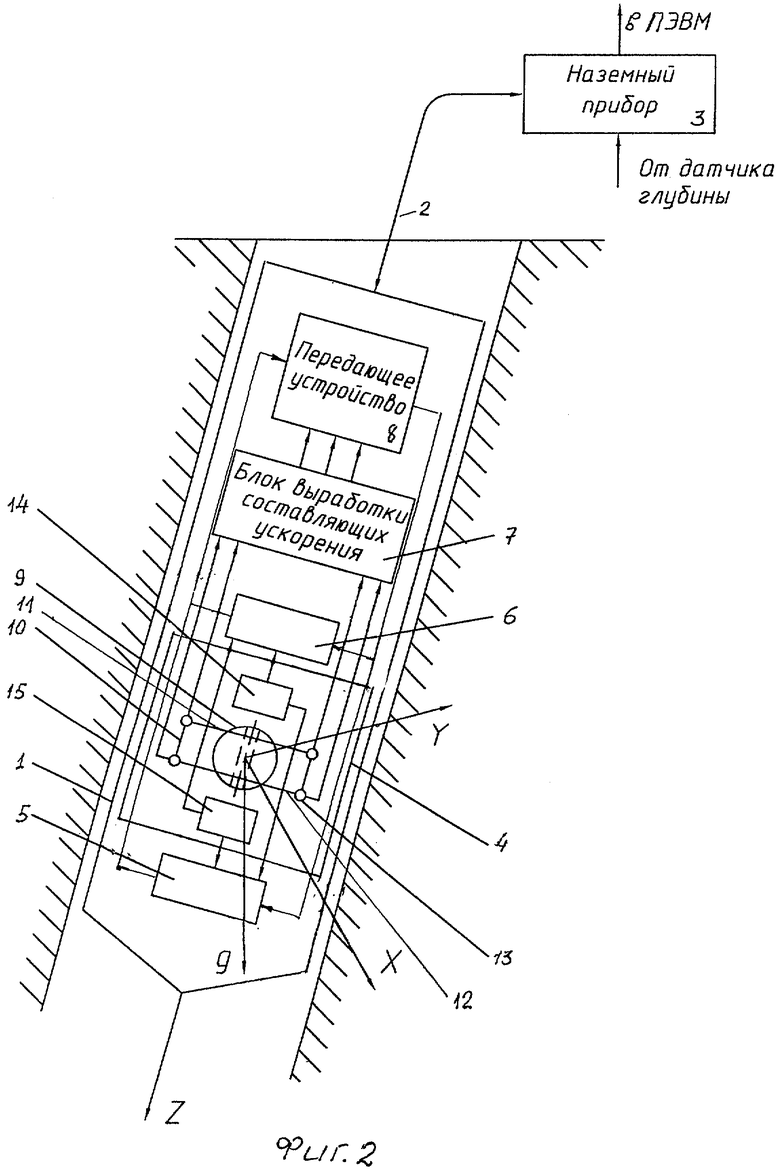
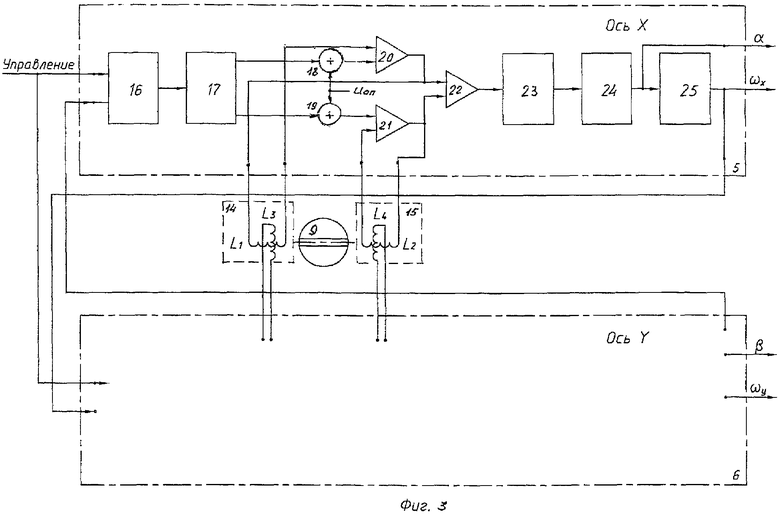
Сущность изобретения поясняется чертежами, где на фиг.1 показаны результаты измерений траектории скважины по азимуту в диапазоне глубин 2300 м - 1600 м, на фиг.2 - блок-схема гироскопического инклинометра, а на фиг.3 - блок-схема блоков управления режимами работы гироскопа по осям Х и Y соответственно.
Способ измерения траектории скважины по азимуту осуществляют следующим образом.
Измерения проводились в диапазоне глубин скважины 2300-1600 м, которая имела постоянное искривление по азимуту 0,13 град/м (фиг.1).
Инклинометр устанавливают на забое в точке А, на глубине 2300 м и включают в режим ДУС, а скважинный прибор удерживают в неподвижном положении в течение времени 3 мин. После получения измеренной информации азимут траектории на забое вычисляют по формуле (1).
После индикации на дисплее наземной ПЭВМ вычисленного азимута гироинклинометр по команде с пульта оператора переводят в режим датчика угла, для чего от ПЭВМ подают команду управления в виде логического нуля на входы блоков управления режимами работы гироскопа, и скважинный прибор переводят в режим непрерывного движения. В диапазоне от точки А до точки В инклинометр работает по приращениям углов прокачки, определяемым по формуле (2)
Из полученного приращения угла прокачки по оси Х вычитают величину угла видимого ухода гироскопа от вращения Земли и получают приращение угла прокачки по оси Х за счет искривления траектории скважины (3), а изменение азимута траектории скважины уточняют в соответствии с функциональной зависимостью, полученной при калибровке инклинометра на стенде по формуле (4). Затем приращение азимутального угла ΔАi суммируют с полной величиной азимута, полученной на остановке в предыдущей точке траектории, и непрерывное движение скважинного прибора осуществляют до тех пор, пока величины углов прокачки не достигнут максимально допустимых значений, затем скважинный прибор останавливают, гироскоп переводят в режим датчика угловой скорости и вновь определяют полную величину азимута траектории скважины.
По достижении углами прокачки предельных значений, например, в точке В на табло дисплея ПЭВМ загорается сигнал СТОП, по которому скважинный прибор останавливают, инклинометр переключают в режим ДУС (на блоки управления режимами работы гироскопа подается команда логическая единица) и в неподвижном положении определяют азимут траектории в точке В, при этом углы прокачки обнуляют. Новый измеренный азимут представляют точкой В1. Инклинометр опять переводят в режим датчика угла, скважинный прибор переводят в режим непрерывного движения до достижения углами прокачки максимально допустимых значений. Таким образом, может быть измерена траектория скважины любой кривизны без начальной выставки прибора перед началом работы.
Гироскопический инклинометр (фиг.2) содержит скважинный прибор 1, каротажным кабелем 2 соединенный с наземным прибором 3.
Скважинный прибор 1 содержит трехстепенной магнитосферический гироскоп 4, блок управления 5 режимами работы гироскопа 4 по оси Х и блок управления 6 режимами работы гироскопа по оси Y, блок выработки составляющих ускорения 7, передающее устройство 8.
Трехстепенной магнитосферический гироскоп 4 содержит ротор 9, магниторезонансный подвес 10 ротора 9 с верхним 11 и нижним 12 статорами подвеса. На верхнем и нижнем статорах 11 и 12 расположены по четыре полюса с электромагнитными катушками 13, которые образуют четыре оси неортогонального подвеса. Гироскоп 4 имеет двухкоординатные датчики угла - датчики момента 14 и 15 по осям Х и Y, реализованные на обмотках L1-L4 (фиг.3); при этом на обмотках L1 и L2 реализовано измерение угла рассогласования (угла прокачки) α ротора 9 гироскопа и корпусом гироскопа 4 по оси X, а на обмотках L3 и L4 измерение угла рассогласования (угла прокачки) β по оси Y. Эти же обмотки служат датчиками момента по соответствующим осям. Входы блоков управления режимами работы гироскопа 5 и 6 соединены с выходом передающего устройства 8, а выходы по углам прокачки α и β и угловым скоростям ωх и ωу через передающее устройство 8 с наземным прибором 3. Продольная ось гироскопа 4 совпадает с продольной осью скважинного прибора Z, оси Х и Y связаны с корпусом гироскопа 4 и корпусом скважинного прибора 1 и перпендикулярны оси Z.
В состав блока 5 управления режимами работы гироскопа (фиг.3) по оси Х входит:
16 - электронный коммутатор;
17 - преобразователь напряжения обратной связи по угловой скорости;
18, 19 - первый и второй сумматоры;
20, 21 - источники тока для питания обмоток L1 и L2 соответственно датчиков угла - датчиков момента 14 и 15;
22 - дифференциальный усилитель;
23 - полосовой фильтр;
24 - фазочувствительный выпрямитель;
25 - интегродифференцирующее звено с усилением входного сигнала.
Схема блока управления 6 режимами работы гироскопа 4 по оси Y аналогична схеме блока управления 5 по оси X.
На первые входы блоков управления 5 и 6 подключен выход передающего устройства 8, по которому передаются от ПЭВМ команды управления режимами работы гироскопа 4, на второй вход блоков управления 5 и 6 подключена обратная связь по угловым скоростям соответственно ωу и ωх.
Гироскопический инклинометр работает следующим образом.
Скважинный прибор 1 устанавливают в начальную точку измерения траектории в скважине и включают в режим датчика угловой скорости (ДУС). На первые входы блоков управления 5 и 6 подается сигнал (логическая 1), при этом электронный коммутатор 16 подключает на вход преобразователя 17 по оси Х с выхода блока управления 6 по оси Y постоянное напряжение обратной связи, пропорциональное величине угловой скорости, а на вход преобразователя блока управления 6 - напряжение выхода блока 5 по оси X.
Преобразователь 17 преобразует пришедшее на его вход постоянное напряжение обратной связи в напряжение частотой 600 Гц и подает его на первые входы сумматоров 18 и 19, на вторые входы которых подаются опорные напряжения датчика угла частотой 3.3 кГц. Суммарным напряжением запитываются обмотки L1 и L2 датчиков угла - датчиков момента 14 и 15. В обмотках L1 и L2 создается магнитный поток, разворачивающий ротор 9 гироскопа 4 в такое положение, чтобы угол α - угол между осью ротора 9 и осью датчика угла - датчика момента 14 и 15 был равен нулю. При этом на вход дифференциального усилителя 22 поступает разность напряжений частотой 3.3 кГц, которая фильтруется полосовым фильтром 23, выпрямляется фазочувствительным выпрямителем 24 и выдается в ПЭВМ. Переходный процесс, заключающийся в совмещении осей ротора и датчика угла - датчика момента, длится 2,5-3,0 минуты, в течение которых скважинный прибор 1 неподвижен. В конце переходного процесса на вход интегродифференцирующего звена 25 поступает напряжение, близкое к нулю, а с его выхода - пропорциональное угловой скорости вращения Земли ωх.
С выхода блока 25 измеренная угловая скорость ωх и измеренные проекции ускорения силы тяжести с выхода блока 7 через передающее устройство 8 поступают в ПЭВМ для вычисления азимутального угла А оси скважины в месте установки скважинного прибора 1.
Затем гироскоп 4 переводят в режим датчика угла (ДУ), а скважинный прибор 1 - в режим непрерывного движения.
При включении режима датчика угла (ДУ) на первые входы электронного коммутатора 16 поступает сигнал (логический ноль), при котором постоянное напряжение обратной связи, пропорциональное угловой скорости вращения Земли, не поступает на вход преобразователя 17, а на входы сумматоров 18 и 19 поступает только опорное напряжение датчика угла частотой 3.3 кГц, которое питает обмотки L1 и L2 датчика угла - датчика момента 14 и 15, с выходов которых напряжение, пропорциональное углу рассогласования между осями ротора 9 и датчика угла - датчика момента, поступает на дифференциальный усилитель 22, фильтруется на полосовом фильтре 23, выпрямляется на фазочувствительном выпрямителе 24 и выдается через наземный прибор 3 в ПЭВМ. В ПЭВМ при непрерывном движении скважинного прибора 1 происходит определение приращений углов α и β, определение приращений углов прокачки от вращения Земли, определение приращений углов прокачки от искривления скважины. При достижении углами прокачки предельных значений 15.0 градусов на дисплее ПЭВМ загорается сигнал СТОП. По этому сигналу оператор останавливает скважинный прибор 1, переводит магнитосферический гироскоп 4 в режим работы ДУС, в результате которого определяется новое значение азимута А, углы α и β обнуляются и по окончанию режима ДУС скважинный прибор 1 переводится в режим непрерывного движения, во время которого измерение азимута производится по приращениям. Чередование режимов работы ДУ и ДУС гироскопа обеспечивает измерение траектории скважины любой кривизны.
Основные преимущества предлагаемого способа измерения траектории скважины по азимуту и двухрежимного бесплатформенного гироскопического инклинометра для его осуществления заключаются в существенном повышении производительности измерений, а также высокой инструментальной точности измерений приращений азимута - единицы угловых секунд.
Сравнительный расчет производительности измерений по способу прототипа и предложенному способу показывает следующее: на измерение траектории скважины длиной 3000 метров при остановках скважинного прибора через 10 метров и стоянке в останова от 2.0 до 3.0 минут прототипу необходимо затратить от 10 до 15 часов.
При использовании предлагаемого способа двухрежимному бесплатформенному инклинометру при искривлении той же скважины на 90.0 градусов и при движении скважинного прибора со скоростью 5000 м/час необходимо затратить не более 1,5 часа, из них 1,2 часа на спуск и подъем скважинного прибора и на 6 остановок по 3,0 минуты - 0,3 часа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1997 |
|
RU2130118C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1995 |
|
RU2095563C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| Гироскопический инклинометр | 1980 |
|
SU901485A1 |
Изобретение относится к навигационной аппаратуре, которая предназначена для контроля пространственного положения траектории ствола обсаженных и необсаженных скважин в процессе их строительства. Техническим результатом является повышение точности и производительности измерений траектории скважины. Для этого способ включает измерение проекций ускорения силы тяжести на измерительные оси скважинного прибора, проекций угловой скорости вращения Земли на соответствующие оси чувствительности скважинного прибора, измерение угла отклонителя скважинного прибора при его непрерывном движении и вращении вокруг продольной оси под действием закрученного геофизического кабеля. При этом в первой точке измерения азимута траектории скважины гироскоп включают в режим датчика угловой скорости на остановке и определяют азимут скважины. Затем по команде с пульта оператора гироскоп переводят в режим датчика угла, а скважинный прибор - в режим непрерывного движения, при котором производят измерение углов прокачки, и определяют приращение углов прокачки между тактами измерений. Затем из полученного приращения угла прокачки по оси Х вычитают величину угла видимого ухода гироскопа от вращения Земли и получают приращение угла прокачки по оси Х за счет искривления траектории скважины. При этом изменение азимута траектории скважины уточняют в соответствии с функциональной зависимостью, полученной при калибровке инклинометра на стенде. Затем приращение азимутального угла суммируют с полной величиной азимута, полученной на остановке в предыдущей точке траектории, и непрерывное движение скважинного прибора осуществляют до тех пор, пока величины углов прокачки не достигнут максимально допустимых значений, затем скважинный прибор останавливают, гироскоп переводят в режим датчика угловой скорости и вновь определяют полную величину азимута траектории скважины. Устройство содержит наземный прибор, соединенный каротажным кабелем с скважинным прибором, содержащим магнитосферический гироскоп, включающий датчики угла - датчики момента по двум измерительным осям, последовательно соединенные блок выработки составляющих ускорения и передающее устройство. Причем в скважинный прибор введены два блока управления режимами работы гироскопа по осям Х и Y, первый и второй входы каждого из которых соединены соответственно с выходом передающего устройства и управляющими выходами магнитосферического гироскопа, а выходы подключены к информационным входам передающего устройства, при этом каждый из блоков управления содержит электронный коммутатор, преобразователь напряжения обратной связи, первый и второй сумматоры напряжений, два источника тока для питания двух обмоток датчика угла - датчика момента, дифференциальный усилитель, полосовой фильтр, фазочувствительный выпрямитель и интегродифференцирующее звено, причем первые входы электронных коммутаторов являются первыми входами блоков управления, второй вход электронного коммутатора по оси Х соединен с выходом интегродифференцирующего звена по оси Y, а второй вход электронного коммутатора по оси Y - с выходом интегродифференцирующего звена по оси X, выход электронного коммутатора каждого блока управления соединен через преобразователь напряжения обратной связи с входами сумматоров, выходы которых соединены с первыми входами источников тока, вторые входы которых подключены к входам соответствующих обмоток датчиков угла - датчиков момента, выходы которых соединены с входами дифференциального усилителя, выход которого подключен через полосовой фильтр к входу фазочувствительного выпрямителя, выход которого соединен с входом интегродифференцирующего звена, причем выходы фазочувствительного выпрямителя и интегродифференцирующего звена являются выходами устройств управления режимами работы магнитосферического гироскопа. 2 н.п.ф-лы, 3 ил.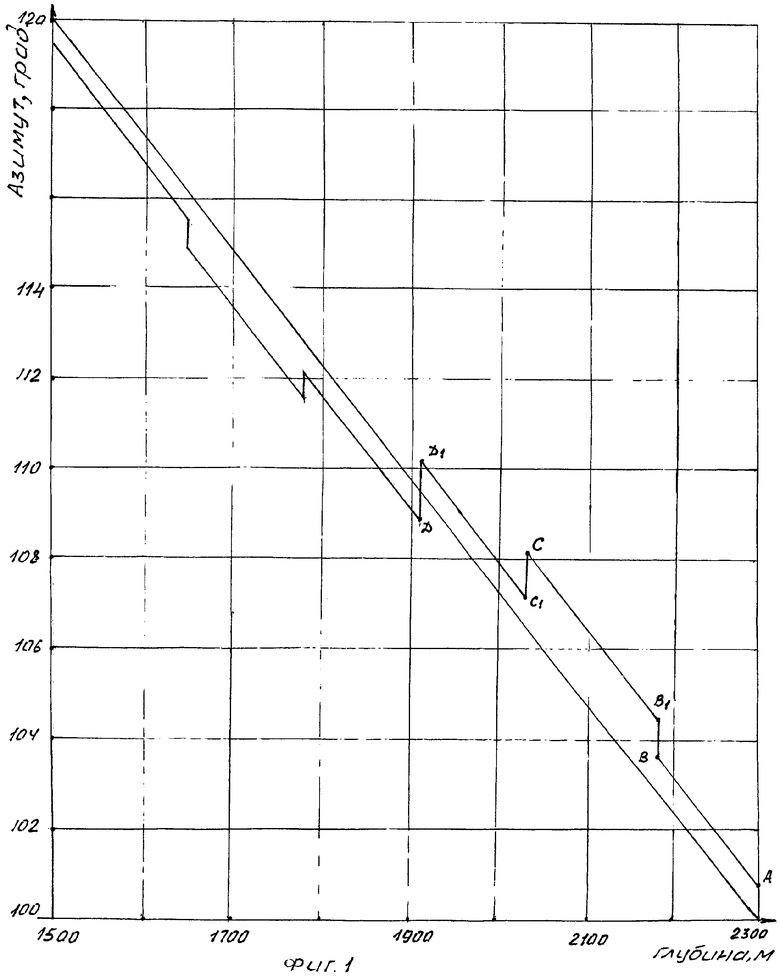

где ψ - широта места расположения скважины;
ω - угловая скорость вращения Земли;
ωх, ωy - проекции угловой скорости вращения Земли на соответствующие оси чувствительности скважинного прибора;
gx, gy, gz - проекции ускорения силы тяжести на измерительные оси скважинного прибора,
затем по команде с пульта оператора гироскоп переводят в режим датчика угла, а скважинный прибор - в режим непрерывного движения, при котором производят измерение углов прокачки, и определяют приращение углов прокачки между тактами измерений по формуле

где Δαi ' - приращение угла прокачки между тактами измерений;
α1 - значение угла прокачки, пересчитанное к углу отклонителя, равному, например, 90.0°, полученное в первом такте;
αi - значения углов прокачки, пересчитанные к углу отклонителя, равному, например, 90.0°, полученные в последующих тактах измерений;
i - номер такта измерения, начиная со второго,
затем из полученного приращения угла прокачки по оси Х вычитают величину угла видимого ухода гироскопа от вращения Земли и получают приращение угла прокачки по оси Х за счет искривления траектории скважины

где Δαi " - изменение угла прокачки по оси Х за счет вращения Земли в течение такта работы вычислителя,
причем приращение угла прокачки по оси Х от вращения Земли получают по формуле

а составляющие угловых скоростей определяют по формуле

где α, β - углы прокачки по осям Х и Y соответственно;
Δt - длительность такта работы вычислителя;
А - азимут траектории скважины в точке съема измеренной информации;
θ - зенитный угол траектории в точке съема измеренной информации;
ϕ - угол отклонителя скважинного прибора в момент съема измеренной информации,
при этом изменение азимута траектории скважины уточняют в соответствии с функциональной зависимостью, полученной при калибровке инклинометра на стенде,

затем приращение азимутального угла ΔAi суммируют с полной величиной азимута, полученной на остановке в предыдущей точке траектории, и непрерывное движение скважинного прибора осуществляют до тех пор, пока величины углов прокачки не достигнут максимально допустимых значений, затем скважинный прибор останавливают, гироскоп переводят в режим датчика угловой скорости и вновь определяют полную величину азимута траектории скважины.
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |

