Изобретение относится к области железнодорожного транспорта и, в частности, может использоваться при вождении соединенных поездов без объединения тормозных магистралей.
Соединение составов в единый поезд без объединения тормозных магистралей нередко применяется для увеличения грузоподъемности. Такое движение имеет определенные преимущества, так как при соединении двух составов не затрачивается время на соединение двух магистралей, их подзарядку и опробование. Для разъединения поезда может потребоваться только притормаживание ведомого состава, что можно выполнить достаточно быстро. Однако при этом возникают затруднения в синхронном управлении таких составов. Блок хвостового вагона (БХВ), имеющий функции: а) измерения значения давления в тормозной магистрали хвостового вагона, б) определения начала торможения, в) определения величины разрядки тормозной магистрали, способствует вождению таких составов. Для стандартного БХВ просто обязательно наличие приемопередатчика для передачи указанных данных из-за его предназначения.
Несмотря на разработку регламентов на управление подобными поездами в силу разных причин возникают аварийные ситуации. В частности, действующая Инструкция под №277 не описывает алгоритм выполнения торможения поездов для таких случаев. А факторами для возникновения этого состояния могут стать, например, непрохождение команд по радиоканалу или разрыв тормозной магистрали (ТМ) одного из составов. При разрыве ведущего состава ведомый состав об этом узнает с определенным временным запозданием. Это является одной из сложностей существующих способов вождения поездов без объединения тормозных магистралей. В случае разрыва в тормозной магистрали первого поезда тормозная волна распространяется к 1-му локомотиву и блоку хвостового вагона. Скорость распространения тормозной волны ограничена скоростью звука. Поэтому в начале изменение давления достигнет только ближайших к разрыву вагонов, и они начнут тормозить. При этом возникает ситуация, когда части первого состава уже тормозят, а второй состав продолжает движение. Получается так, что, чтобы начать торможение второму поезду (если программой не предусмотрено иное), волна должна дойти до 1-го локомотива или БХВ. Блок (устройство) хвостового вагона с ведущего состава информирует о произошедшем изменении давления также ведомый локомотив, тормозная магистраль которого является автономной.
Затем система управления ведущего локомотива должна определить факт того, что произошло срабатывание тормозов в его составе. А только потом подается сигнал по радиоканалу на второй локомотив. При приеме соответствующей радиокоманды торможение выполняется приставкой к крану машиниста с дистанционным управлением. При этом кран производит разрядку тормозной магистрали 2-го поезда на величину требуемого режима торможения. Имеющийся здесь недостаток это большой промежуток времени от разрыва магистрали первого состава (особенно в хвостовой части) до начала разрядки на втором составе.
Пневматическая тормозная система имеет определенную инерционность. Обычное торможение, выполняемое вторым составом, приводит к задержке времени приведения в действие тормозов, примерно в 3-10 сек. Это связано с тем, что в пневматической схеме управления торможением присутствуют емкости, наполнение и опорожнение которых требует времени.
Кроме того, обычный метод торможения не спасает от возможного набегания второго состава на оторвавшуюся часть впереди идущего и выдавливания вагонов. При таком развитии ситуации может быть недостаточно и экстренного торможения, предлагаемого в недавно предложенном решении, применяемого при разрыве магистрали одного из составов (пат. RU №2354569, В61С 17/12, от 02.05.2007, прототип). Здесь используется принцип контроля продольных усилий на автосцепках локомотивов. Однако не каждый локомотив на практике оснащен такой автосцепкой, а водить соединенные составы в едином поезде можно, используя пневматическое торможение и БХВ.
Возникает необходимость в дальнейшем уточнении путей минимизации последствий от разрыва тормозной магистрали. Для этого предлагается уменьшить время срабатывания и увеличить глубину разрядки тормозной магистрали второго локомотива относительно хвостового вагона ведущего состава.
Задача изобретения - уменьшение последствий описанных аварийных ситуаций путем расширения алгоритма действий при торможении.
Указанная задача решается тем, что в способе управления тормозами соединенных поездов, включающего разрядку уравнительного резервуара, дополнительно осуществляют разрядку управляющей (уравнительной) камеры крана машиниста темпом 1-4 кгс/см2 в секунду, таким образом, чтобы величина разрядки тормозной магистрали второго локомотива превышала разрядку тормозной магистрали хвостового вагона первого состава на заданную величину, например на величину 0,1-0,4 кгс/см2, в зависимости от тормозной эффективности составов.
Технический результат достигается в предложенном способе благодаря тому, что осуществляется непрерывный контроль давлений в тормозных магистралях соединенного поезда. Его величина может резко измениться только при обрыве тормозной магистрали в одном из составов. Степень аварийности при разрыве первого состава гораздо выше. При такой аварийной обстановке с помощью устройства хвостового вагона осуществляют передачу на второй локомотив всеми доступными средствами (по радиоканалу БХВ, по проводам, индуктивным образом, инфракрасным или другими устройствами) зафиксированного времени начала торможения и величины разрядки тормозной магистрали, значения давления в тормозной магистрали хвостового вагона первого поезда. Принятые вторым локомотивом данные обрабатываются блоком управления (БУ), и с помощью исполнительного устройства регулятора локомотивного торможения (РЛТ) или крана машиниста с дистанционным управлением осуществляется воздействие на управляющую камеру крана машиниста: темп разрядки управляющей камеры примерно 1-4 кгс/см2 в секунду, устанавливающий дополнительное увеличение разрядки тормозной магистрали второго локомотива на величину Δрдоп - от 0,1 до 0,4 кгс/см2 в зависимости от тормозной эффективности первого и второго составов. Под темпом разрядки понимается скорость изменения давления в объеме. Одинаковое изменение давления может происходить за разное время, например от нескольких суток (утечки) до секунды (экстренное торможение). Но и при экстренном торможении параметры истечения воздуха должны быть контролируемы в заданных пределах.
Таким образом, реакция на разрыв начинается ведомым локомотивом после прихода соответствующей команды торможения или с ведущего локомотива, или с блока хвостового вагона первого состава, или с блока хвостового вагона второго состава в соответствии с заложенным алгоритмом управления срабатыванием на сброс тяги. Затем проводится торможение ведомым локомотивом темпом экстренного торможения указанным выше образом. Причем для этого дополнительно выполняют разрядку управляющей (уравнительной) камеры крана машиниста.
Подробные пояснения предлагаемого способа даются ниже с использованием соответствующих фигур.
На фиг.1 представлена схема, поясняющая предлагаемый алгоритм действий при вождении грузовых поездов с распределенными по их длине локомотивами.
Здесь соединенный грузовой поезд повышенной длины с распределенными по их длине локомотивами (показан только ведущий (Л1)-1 и ведомый или подталкивающий (Л2)-2) содержит установленные на каждом локомотиве блоки контроля и управления 3, приемопередающее устройство 4 и блоки хвостового вагона 5, установленные на автосцепках 7 последних вагонов. Место разрыва тормозной магистрали 6 относится к ведущему составу. Датчики давления, пути, датчик №418 (обрыва ТМ), скорости и ускорений, имеющиеся на локомотивах и блоках хвостового вагона 5, не показаны.
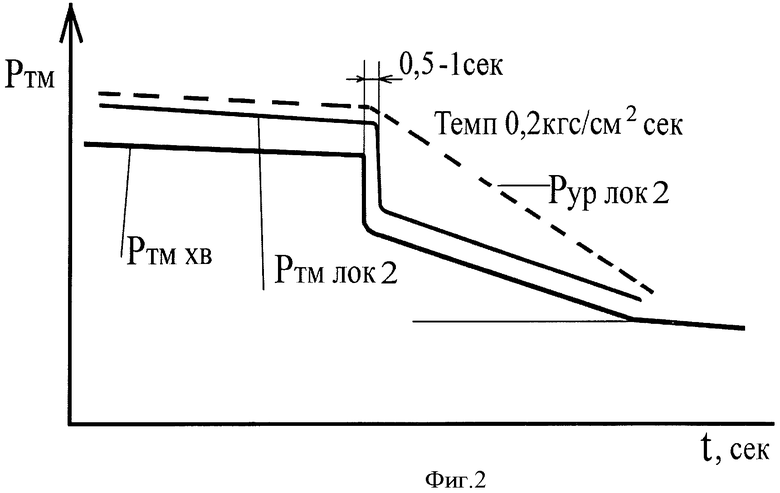
На фиг.2 в качестве иллюстрации приведена качественная зависимость изменения давления в тормозной магистрали хвостового вагона первого состава, тормозной магистрали и уравнительного резервуара второго локомотива от времени. Эта зависимость поясняет возникновение составляющих времен задержки и поясняет реализацию способа.
Здесь: Ртм - давление в тормозной магистрали, кгс/см2,
t - время в секундах,
Ртм хв - давление в хвостовом вагоне ведущего состава,
Ртм лок 2 - давление в тормозной магистрали ведомого локомотива,
Рур лок 2 - давление в уравнительном резервуаре ведомого локомотива.
Для оценки времени задержки срабатывания на торможение второго локомотива были использованы следующие предположения:
Δt1 - время распространения воздушной волны от места разрыва до локомотива Л1,
Δt2 - время, необходимое системе локомотива на идентификацию процесса самопроизвольного самоторможения и подачи соответствующей команды торможения на радиомодем,
Δt3 - время передачи радиокоманды с локомотива Л1 на локомотив Л2,
Δt4 - время на разрядку тормозной магистрали 2-го состава, чтобы его тормозные приборы переключились на режим торможения и начала наполнения тормозных цилиндров воздухом до 0,4 кгс/см2,
tзадер=Δt1+Δt2+Δt3+Δt4, при этом Δt1 зависит от длины состава и состояния тормозной системы поезда. Если длину состава взять 1000 м и эксплуатационную скорость тормозной волны порядка 200 м/с, то Δt1 - около 5 с,
Δt2 - это время определяется срабатыванием датчика №418 (сигнализатора обрыва тормозной магистрали) и принимается от 1 до 3 с,
Δt3 - время передачи команды в интервале порядка 1 с. Здесь время берется с запасом, так как возможен недостаточно хороший электромагнитный фон и команда вообще может не пройти или пройти с большой задержкой,
Δt4 - определяется временем разрядки уравнительного резервуара крана машиниста, темп разрядки которого принимается порядка 0,2 кгс/см2с. Для того чтобы привести в действия тормоза, требуется разрядить уравнительный резервуар и управляющую камеру на 0,2÷0,3 кгс/см2с, т.е времени на это потребуется порядка 1-1,5 с.
Отсюда следует tзaдep=8÷10 с. За это время тормозные цилиндры основной массы вагонов будут наполнены - тормозная эффективность поезда будет приближена к максимальной.
Команды управления тягой и пневматическими тормозами вырабатываются блоком управления на всех локомотивах с учетом поступающих для анализа параметров.
Ведущий и ведомый локомотивы, а также БХВ ведут контроль давлений соответствующими датчиками. При этом ведомый локомотив 2 учитывает команды, полученные по радиосвязи с ведущего локомотива 1, и формирует собственные команды для своих исполнительных устройств. Этим обеспечивается ведение составного поезда с распределенной тягой.
Осуществление предлагаемых шагов, например, в случае разрыва ведущего состава для поезда из ведущего и ведомого составов с локомотивами 1 и 2, представленных на схеме фиг.1, выполняется описанной ниже последовательностью действий.
Если при движении возникает разрыв автосцепки на одном из вагонов ведущего состава, то тормозная магистраль сообщается с атмосферой. При разрыве начинают тормозить вагоны по разные стороны от места разрыва, изменяя силу сопротивления движению, что сказывается на скорости движения. Если расстояние до головного локомотива меньше, чем до локомотива, установленного в середине состава, то изменения давления и скорости будут зафиксированы именно им. Автоматически последует команда на сброс тяги ведущему локомотиву при установлении факта изменения давления и скорости. Если первым изменения давления зафиксирует БХВ ведущего состава, то он передаст соответствующие сведения для сброса тяги локомотивам и затем ведомый локомотив по команде применит торможение ступенью выше, чем 0,6 кгс/см2, но высоким темпом, величиной, превышающей на 0,1-0,4 кгс/см2 разрядку БХВ ведущего состава одновременно со своим БХВ. При этом разрядка проводится за счет дополнительной разрядки уравнительной камеры крана машиниста. Как видно из приведенных зависимостей, вышеописанные шаги уменьшают время срабатывания на торможение до величины примерно половины секунды, достаточной чтобы при торможении второго состава на указанную величину избежать выдавливания вагонов первого состава.
Эти действия в случае разрыва ведущего состава и его торможения позволят избежать усугубления приведенной аварийной ситуации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЖДЕНИЯ СОЕДИНЕННЫХ ПОЕЗДОВ | 2007 |
|
RU2354569C2 |
| СПОСОБ КОНТРОЛЯ ТОРМОЗА ПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2338652C2 |
| СПОСОБ ЗАРЯДКИ И ОПРОБОВАНИЯ ТОРМОЗОВ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2009 |
|
RU2422308C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВОЖДЕНИЯ СОСТАВОВ | 2007 |
|
RU2411147C2 |
| МНОГОТИПОВОЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС | 2009 |
|
RU2395405C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИСПЫТАНИЯ ТОРМОЗНОГО ОБОРУДОВАНИЯ ВАГОНОВ | 2009 |
|
RU2414366C2 |
| Система управления автотормозами соединенных поездов | 1980 |
|
SU931544A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2008 |
|
RU2385247C1 |
| Способ опробирования автотормозов в грузовых поездах и устройство для его реализации | 2019 |
|
RU2744643C1 |
| СПОСОБ И СИСТЕМА РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ | 2014 |
|
RU2571000C2 |
Изобретение относится к области автоматически действующих тормозов для замедления движения рельсовых транспортных средств. Осуществляют управление по радиоканалу (4) тяговыми и тормозными параметрами соединенных поездов с распределенными по их длине локомотивами (1, 2) с головного локомотива (1), посредством разрядки уравнительного резервуара крана машиниста. Дополнительно осуществляют разрядку управляющей (уравнительной) камеры крана машиниста второго локомотива (2) темпом 1-4 кгс/см2 в секунду таким образом, чтобы разрядка тормозной магистрали второго локомотива (2) превышала разрядку тормозной магистрали хвостового вагона первого состава на заданную величину, например на величину 0,1-0,4 кгс/см2, в зависимости от тормозной эффективности составов. Достигается повышение безопасности эксплуатации рельсовых транспортных средств. 2 ил.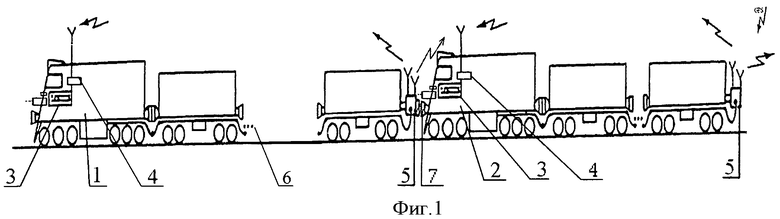
Способ управления тормозами соединенных поездов с распределенными по их длине локомотивами, включающий управление по радиоканалу тяговыми и тормозными параметрами с головного локомотива посредством разрядки уравнительного резервуара крана машиниста, отличающийся тем, что дополнительно осуществляют разрядку управляющей (уравнительной) камеры крана машиниста второго локомотива темпом 1-4 кгс/см2 в 1 с, таким образом, чтобы разрядка тормозной магистрали второго локомотива превышала разрядку тормозной магистрали хвостового вагона первого состава на заданную величину, например, на величину 0,1-0,4 кгс/см2, в зависимости от тормозной эффективности составов.
| СПОСОБ ВОЖДЕНИЯ СОЕДИНЕННЫХ ПОЕЗДОВ | 2007 |
|
RU2354569C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВОЖДЕНИЯ ГРУЗОВЫХ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ С РАСПРЕДЕЛЕННЫМИ ПО ИХ ДЛИНЕ ЛОКОМОТИВАМИ | 2003 |
|
RU2238860C1 |
| Способ получения полимера-носителя для гель-иммобилизованных металлокомплексных каталитических систем | 1981 |
|
SU1070880A1 |
| JP 4207905 А, 29.07.1992 | |||
| US 6401015 В2, 04.06.2002 | |||
| СПОСОБ МНОГОКРАТНОГО РАДИОПРИЕМА | 1924 |
|
SU945A1 |

