Изобретение относится к способу и устройству для разгрузки роликовых тележек с поддонов и их транспортирование, так называемых подкатных тележек, содержащих, по меньшей мере, два установленных с возможностью вращения вокруг вертикальной оси направляющих колеса. При этом тележки доставляют на загрузочный участок, снимают с поддона и/или при необходимости укладывают в штабеля посредством подъемного устройства, например, робота с сочлененной стрелой, а затем переводят на прилегающую к загрузочному участку транспортно-откаточную линию. При этом существенно, что выравнивание тележки и/или ее направляющих колес контролируют перед установкой на транспортно-откаточную линию при помощи, по меньшей мере, одного датчика, например, цифровой камеры, причем датчик соединен с подходящим автоматизированным блоком обработки данных, а в последующем управляют трехмерным движением подъемного устройства, как правило, робота с сочлененной стрелой, в зависимости от контролируемых замеряемых значений.
Все большее значение в организации транспортировки, хранения и перегрузки товаров и продуктов приобретают колесные транспортные системы. Это колесные поддоны, так называемые подкатные тележки. Такая подкатная тележка показана в DE 0251439 А2. Эти маленькие тележки имеют, как правило, опорную площадку, соответствующую половине или одной четверти поддона по стандарту ЕС, причем из четырех роликов, как правило, одна пара представляет собой направляющие колеса, установленные с возможностью вращения вокруг вертикальной оси. Вторая пара выполнена неуправляемой. В ЕР 1149753 А2 показана такая подкатная тележка, названная в этой публикации как транспортная тележка. В повторно используемых системах, подкатные тележки возвращают поставщику установленными в штабели на европоддоне и загружают их новым товаром. Загруженные тележки обычно составляют, фиксируют и повторно доставляют на транспортных поддонах, как правило, на европоддонах.
В DE 3442111 C2 показано устройство и способ, в котором отдельный загруженный роликовый поддон транспортируют посредством транспортировочной штанги, снабженной захватами. Однако проблематичным в системе возврата является неоднообразное выравнивание сложенных тележек, и прежде всего то, что направляющие колеса могут быть направлены в любом направлении. Это требует выравнивания тележек и/или их направляющих колес перед или после новой загрузки для создания возможности дальнейшего оптимального расположения нагруженных тележек на поддоне.
Исходя из этого задачей изобретения является создание устройства и способа, исключающих или устраняющих вышеупомянутые проблемы.
Эта задача решается данным изобретением посредством способа разгрузки с поддонов и транспортирования тележек, так называемых подкатных тележек, причем тележки доставляют на загрузочный участок, при необходимости разгружают с поддонов и/или укладывают в штабеля посредством подъемного устройства, например, робота с сочлененной стрелой, а затем переводят на транспортно-откаточную линию. При этом выравнивание тележки и/или направляющих колес контролируют перед установкой на транспортно-откаточную линию при помощи, по меньшей мере, одного датчика, соединенного с подходящим автоматизированным блоком обработки данных. Последующее трехмерное движение подъемного устройства регулируют в зависимости от контролируемых замеряемых значений.
Предпочтительно сенсорное устройство состоит из одной или нескольких цифровых камер, посредством которых контролируют данные реального изображения (реальные изображения) и сравнивают в автоматизированном блоке обработки данных с заданными образцами (заданными изображениями) или другими заданными величинами. Затем, базируясь на этом, управляют трехмерным движением подъемного устройства для достижения оптимального и единого позиционирования и выравнивания тележек, а также их колес на транспортно-откаточной линии.
Усовершенствованный вариант способа состоит в том, что при неправильной установке или неправильном выравнивании, по меньшей мере, одного из направляющих колес, тележку наклоняют после приподнимания подъемным устройством вокруг горизонтальной оси, так что, как правило, два направляющих колеса стоят вместе над или под неподвижными колесами, и два направляющих колеса выравнивают одинаково, или по существу одинаково посредством силы тяжести. Угол наклона α составляет предпочтительно от 30° до 90°. Выравнивание колес может поддерживаться посредством вибрационных и/или целенаправленных движений ускорения подъемного устройства. Вибрационные и/или целенаправленные движения ускорения при необходимости можно неоднократно повторять. Затем тележку устанавливают на транспортно-откаточную линию. Этот вариант способа имеет большое преимущество в том, что для выравнивания направляющих колес не требуется никакого отдельного этапа способа или устройства, а это выравнивание или выпрямление происходит параллельно при переводе тележки от участка доставки на транспортно-откаточную линию и без других вспомогательных средств или инструментов. Предпочтительно, если затем тележку устанавливают на транспортно-откаточную линию так, что направляющие колеса ниже неподвижных колес и направляющие колеса устанавливают сначала. Затем тележку поворачивают вокруг горизонтальной оси по горизонтальной линии. При установке тележки, к началу процесса поворота по горизонтали, угол поворота α предпочтительно составляет от 30° до 60°.
Поскольку вертикальные опоры направляющих колес легко загрязняются, вследствие чего вращение иногда или полностью не происходит только на основе силы тяжести, оптимизация состоит в том, чтобы предусматривать на транспортно-откаточной линии, по меньшей мере, один направляющий элемент, в который вводят, по меньшей мере, одно из направляющих колес при установке тележки на транспортно-откаточную линию для коррекции при необходимости имеющейся неправильной установки или неполного выравнивания направляющего колеса.
Кроме того, предпочтительно по соображениям безопасности способа предусматривать на участке, на который ставят тележку после перевода на транспортно-откаточную линию, по меньшей мере, один датчик положения. Например, при не оптимальном позиционировании тележки на транспортно-откаточной линии и/или при не оптимальном выравнивании одного из направляющих колес, может выдаваться сообщение о сбое, а затем последовать повторное выравнивание тележек и/или их направляющих колес или прекращение способа. Предпочтительно, если положение колес тележки непосредственно после установки на транспортно-откаточную линию контролирует, по меньшей мере, один датчик положения, в частности, положение первых обоих колес.
Изобретение включает также устройство для разгрузки с поддонов и транспортирования роликовых тележек, содержащее загрузочный участок для доставки, как правило, сложенных в штабеля тележек, по меньшей мере, одно подъемное устройство для поднятия и перевода тележек на примыкающую транспортно-откаточную линию. В частности, устройство содержит, по меньшей мере, один датчик и автоматизированный блок, посредством которых можно контролировать выравнивание тележек и их направляющих колес на участке доставки и управлять и/или регулировать последующими движениями, по меньшей мере, одного подъемного органа для оптимального перевода и позиционирования тележек на транспортно-откаточной линии. В одном варианте устройства датчик может представлять собой оптоэлектронный сенсор, причем предпочтительно он содержит одну или несколько цифровых камер. При этом подъемное устройство предпочтительно является одноплечным или роботом с сочлененной стрелой, обеспечивающим плавное трехмерное движение.
Другое усовершенствование состоит в том, что предусмотрен соединенный с автоматизированным блоком управления датчик положения, контролирующий положение колес тележки непосредственно после установки на транспортно-откаточную линию и передающий дальше данные измерения на блок управления для последующей обработки. Он может быть расположен на или в транспортно-откаточной линии и контролировать правильное положение колес. В данном случае у специалиста находятся в распоряжении много различных видов датчиков. Предпочтительно датчики располагаются даже в направляющей или на рабочей поверхности и устанавливают положение колеса индуктивно или как сенсор давления.
Альтернативно датчик положения можно располагать на или в подъемном устройстве. В этом случае вывод о правильном или неправильном положении тележки и/или ее направляющих колес можно делать исходя из достигнутого конечного положения подъемного устройства. К тому же предпочтительно, если на транспортно-откаточной линии предусмотрены подходящие отбойные кромки и/или датчики сигналов, соединенные непосредственно или через автоматизированный блок обработки данных с датчиком положения в или на одноплечном роботе или роботе с сочлененной стрелой. Согласно усовершенствованному варианту предусматривается на транспортно-откаточной линии, по меньшей мере, один направляющий элемент, с возможностью введения в него, по меньшей мере, одного из направляющих колес при установке тележки на транспортно-откаточную линию, причем предпочтительно, если для каждого направляющего колеса предусмотрен один направляющий элемент. Это позволяет при необходимости корректировать неправильную установку направляющих колес и облегчать установку тележек. Для этого в распоряжении специалиста имеется много форм выполнения. Наиболее подходящий вариант такого направляющего элемента имеет выступающие вверх над направляющей или над траекторией движения транспортно-откаточной линии согнутые наружу в виде воронки боковые стенки. Направляющие колеса проводятся через конструкцию в виде воронки и выравниваются. В усовершенствованном варианте направляющие элементы утапливаются, так чтобы они не могли после установки тележки и при ее транспортировке цепляться за нее.
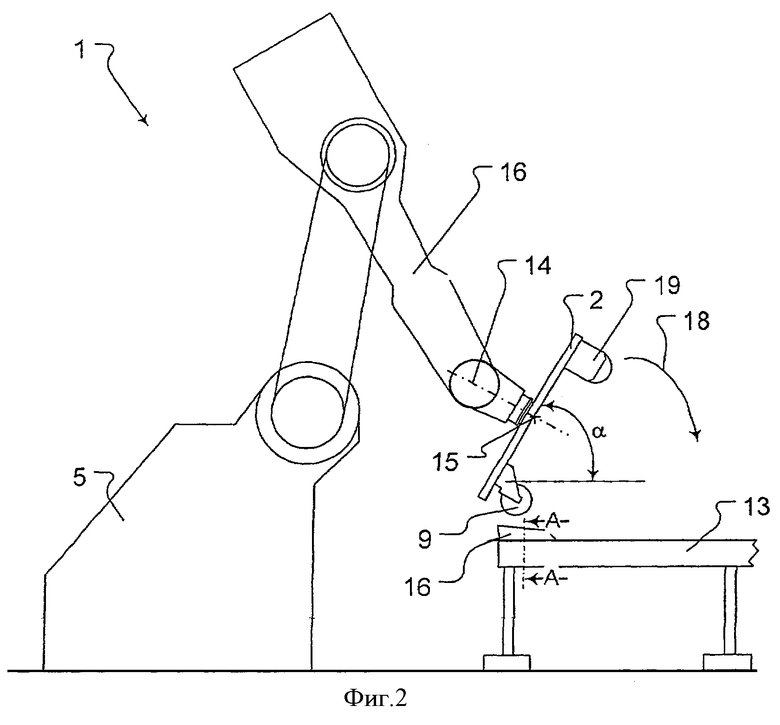
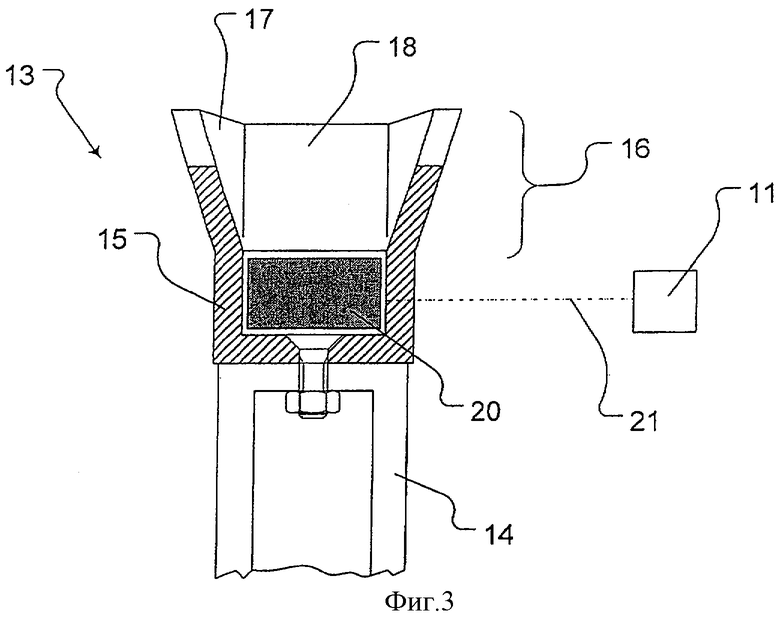
На фиг.1 и 2 показано в качестве примера устройство для разгрузки с поддонов и транспортировки роликовых тележек, а на фиг.3 показан направляющий элемент в деталях, изображение в разрезе.
На фиг.1 показан общий вид устройства 1, предназначенного для разгрузки с поддонов и транспортировки роликовых тележек при захватывании первой тележки 2, стоящей наверху на штабеле, состоящем из нескольких тележек. Сам штабель удерживается на поддоне 3. Тележки 2 и поддон 3 находятся на загрузочном участке 4. Робот 5 с сочлененной стрелой захватывает не показанным детально захватывающим инструментом 6 самую верхнюю роликовую тележку 2. Выравнивание роликовой тележки 2 и направляющих колес 9 контролируют посредством цифровых камер 7 и 8, а контролируемые реальные изображения посылается по линии 10 передачи данных на автоматизированный блок 11 обработки данных, обрабатывают, а затем по линии 12 передачи данных осуществляют управление роботом 5 с сочлененной стрелой. Естественно, линии 10 и 12 передачи данных могут служить в качестве канала передачи в случае беспроводной передачи данных. В показанном примере цифровая камера 7 контролирует выравнивание направляющих колес 9, а цифровая камера 8 выравнивание и положение собственно тележки 2.
На фиг.2 показан процесс установки роликовой тележки 2 на транспортно-откаточную линию 13. Роликовую тележку 2 при подъеме из загрузочного участка поворачивают вокруг оси 14 и наклоняют под углом α вокруг оси 15. На фиг.2 ось 15 расположена вертикально на плоскости чертежа и обозначена маленьким крестиком. При установке роликовой тележки 2 на транспортно-откаточную линию 13, тележка 2 опускается в направлении стрелки 17 и одновременно осуществляет движение наклона в направлении стрелки 18. Неподвижные колеса 19 устанавливают после направляющих колес 9, причем направляющие колеса 9 подгоняют и направляют в направляющем элементе 20.
На фиг.3 показан разрез направляющей транспортно-откаточной линии 13, по линии разреза А-А (фиг.2), причем транспортно-откаточная линия 13 содержит две, по существу, идентично сконструированные направляющие, по которым двухмоментно транспортируют роликовые тележки 2. Транспортно-откаточная линия 13 имеет опорные ножки 14 и по существу горизонтально направленные направляющие 15. В показанном разрезе А-А направляющая 15 переходит неразрывно в направляющий элемент 16, из которого изображены оба наклоненные наружу боковые элементы 17 и задняя стенка 18. Задняя стенка 18 разделена на две части, одна из которых наклонена вертикально, а другая - назад. На вертикальном участке задней стенки 18 установлен датчик 20 положения. Неправильное положение направляющего колеса 9 обнаруживают индуктивно, если оба направляющих колеса 9 не ударяются о датчик 20 положения в начале установки тележки 9 на транспортно-откаточную линию. По линии 21 передачи данных эти сведения передаются в автоматизированный блок 11 управления и обрабатываются в нем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕГРУЗКИ СТРОЙМАТЕРИАЛОВ И ТРАНСПОРТИРОВКИ К МЕСТУ УКЛАДКИ НА ЭТАЖАХ МОНОЛИТНОГО ЗДАНИЯ И ОСНАСТКА "МАКСИНИО" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2308408C2 |
| АВТОМАТИЗИРОВАННАЯ СТОЯНКА ДЛЯ АВТОМОБИЛЕЙ | 2017 |
|
RU2641155C1 |
| СТАНЦИЯ ДЛЯ ПЕРЕВАЛКИ ТОВАРОВ | 2013 |
|
RU2540681C2 |
| РОБОТИЗИРОВАННАЯ МОДУЛЬНАЯ ТЕЛЕЖКА | 2023 |
|
RU2800784C1 |
| ГРУЗОВАЯ ТЕЛЕЖКА ДЛЯ ПЕРЕВОЗКИ ДРЕВЕСИНЫ | 2011 |
|
RU2535969C2 |
| ХРАНИЛИЩЕ (ВАРИАНТЫ) | 2010 |
|
RU2427692C1 |
| АВТОМАТИЧЕСКИЙ ПОСЕВ И ОЦЕНКА СЕМЯН | 2019 |
|
RU2810001C2 |
| Устройство для укладки и транспортировки бобин с пряжей | 1987 |
|
SU1636314A1 |
| Транспортная складская система | 2016 |
|
RU2643615C2 |
| ОБОРУДОВАНИЕ ДЛЯ УКЛАДКИ НЕ ИМЕЮЩИХ ПОДДОНОВ УПАКОВОК РАЗЛИЧНЫХ РАЗМЕРОВ НА СТЕЛЛАЖИ ТОВАРНОГО СКЛАДА | 2006 |
|
RU2562087C2 |
Тележки (2), содержащие два установленных с возможностью вращения вокруг вертикальной оси направляющих колеса, доставляют в загрузочный участок (4), разгружают с поддонов (3) и/или разбирают из штабеля посредством робота (5) с сочлененной стрелой, а затем переводят на прилегающую к загрузочному участку транспортно-откаточную линию. Выравнивание тележки и/или ее направляющих колес контролируют перед установкой на транспортно-откаточную линию при помощи цифровой камеры (7) и автоматизированного блока (11) обработки данных. В последующем управляют трехмерным движением робота в зависимости от контролируемых замеряемых значений. Обеспечивается однообразное выравнивание колес тележек. 2 н. и 16 з.п. ф-лы, 3 ил.
1. Способ разгрузки с поддонов и транспортирования роликовых тележек, так называемых подкатных тележек, содержащих, по меньшей мере, два установленных с возможностью вращения вокруг вертикальной оси направляющих колеса, причем роликовые тележки доставляют в загрузочный участок посредством подъемного устройства, например, робота с сочлененной стрелой, при необходимости, разгружают с поддонов и/или разбирают из штабеля, а затем переводят на прилегающую к загрузочному участку транспортно-откаточную линию, отличающийся тем, что выравнивание роликовой тележки и/или ее направляющих колес контролируют перед установкой на транспортно-откаточную линию при помощи, по меньшей мере, одного датчика, например, цифровой камеры, причем датчик соединен с подходящим автоматизированным блоком обработки данных, причем в последующем управляют трехмерным движением подъемного устройства в зависимости от контролируемых замеряемых значений.
2. Способ по п.1, отличающийся тем, что, по меньшей мере, одно сенсорное устройство является цифровой камерой, а контролируемые данные реального изображения (реальные изображения) сравнивают в автоматизированном блоке обработки данных с заданными образцами (заданные изображения), и посредством этого управляют трехмерным движением, по меньшей мере, одного подъемного устройства для достижения оптимального и единого позиционирования и выравнивания тележек, а также их колес на транспортно-откаточной линии.
3. Способ по любому из пп.1 или 2, отличающийся тем, что при неправильной установке или неправильном выравнивании, по меньшей мере, одного из направляющих колес тележку наклоняют после приподнимания подъемным устройством вокруг горизонтальной оси, так что два направляющих колеса одинаково или, по существу, одинаково выравнивают посредством силы тяжести, а затем тележку устанавливают на транспортно-откаточную линию.
4. Способ по п.3, отличающийся тем, что угол наклона α равен 30° - 90°, а при установке тележки на транспортно-откаточную линию составляет 30° - 60°.
5. Способ по п.1, отличающийся тем, что подъемное устройство выполняет для выравнивания колес вибрационные и/или целенаправленные движения ускорения.
6. Способ по п.1, отличающийся тем, что транспортно-откаточная линия имеет, по меньшей мере, один направляющий элемент, в который вводят, по меньшей мере, одно из направляющих колес при установке тележки на транспортно-откаточную линию для коррекции при необходимости имеющейся неправильной установки направляющего колеса.
7. Способ по любому из пп.1, 2, 4-6, отличающийся тем, что на участке, на который ставят тележку после перевода на транспортно-откаточную линию, предусмотрен, по меньшей мере, один датчик положения, так что при не оптимальном позиционировании тележки на транспортно-откаточной линии и/или при не оптимальном выравнивании одного из направляющих колес выдают сообщение о сбое, а затем может последовать повторное выравнивание тележек и/или их направляющих колес или прекращение способа.
8. Способ по п.7, отличающийся тем, что положение колес тележки непосредственно после установки на транспортно-откаточную линию контролируют, по меньшей мере, посредством одного датчика положения.
9. Устройство для разгрузки с поддонов и транспортирования роликовых тележек, так называемых подкатных тележек, имеющих, по меньшей мере, два установленных с возможностью вращения вокруг вертикальной оси направляющих колеса, содержащее загрузочный участок для доставки, как правило, сложенных в штабеля тележек, по меньшей мере, одно подъемное устройство для поднятия и перевода тележек на примыкающую транспортно-откаточную линию, отличающееся тем, что устройство содержит, по меньшей мере, один датчик и автоматизированный блок, посредством которых можно контролировать выравнивание тележек и их направляющих колес на участке доставки и управлять и/или регулировать последующие движения, по меньшей мере, одного подъемного органа для оптимального перевода и позиционирования тележек на транспортно-откаточной линии.
10. Устройство по п.9, отличающееся тем, что сенсор является оптоэлектронным датчиком, предпочтительно цифровой камерой.
11. Устройство по п.9 или 10, отличающееся тем, что подъемное устройство является роботом с сочлененной стрелой.
12. Устройство по п.9 или 10, отличающееся тем, что предусмотрен соединенный с автоматизированным блоком управления датчик положения, контролирующий положение колес тележки непосредственно после установки на транспортно-откаточную линию и передающий дальше данные измерения на блок управления для последующей обработки.
13. Устройство по п.12, отличающееся тем, что на транспортно-откаточной линии расположен, по меньшей мере, один датчик положения и контролирующий правильное положение колес.
14. Устройство по п.12, отличающееся тем, что, по меньшей мере, один датчик положения расположен на или в подъемном устройстве, причем по достигнутому конечному положению подъемного устройства контролируется правильная или неправильная установка тележки и/или ее направляющих колес на транспортно-откаточной линии, для чего на транспортно-откаточной линии могут быть предусмотрены отбойные кромки и/или датчики сигналов.
15. Устройство по любому из пп.9, 10, 13, 14, отличающееся тем, что на транспортно-откаточной линии предусмотрен, по меньшей мере, один направляющий элемент с возможностью введения в него, по меньшей мере, одного из направляющих колес при установке тележки на транспортно-направляюшую линию для корректирования при необходимости неправильной установки направляющего колеса.
16. Устройство по п.15, отличающееся тем, что этот направляющий элемент имеет выступающие вверх над направляющей или над траекторией движения транспортно-направляющей линии и согнутые наружу в виде воронки боковые стенки, сходящиеся вниз, в направлении направляющей или траектории движения.
17. Устройство по п.15, отличающееся тем, что направляющий элемент можно утапливать.
18. Устройство по п.16, отличающееся тем, что направляющий элемент можно утапливать.
| Устройство для загрузки листовых материалов | 1988 |
|
SU1627483A2 |
| US 4815916 А, 28.03.1989 | |||
| DE 3442111 А1, 10.07.1986 | |||
| EP 1125818 A1, 22.08.2001 | |||
| US 6257152 B1, 10.07.2001 | |||
| ПРОИЗВОДНОЕ ПИРАЗОЛА, АГЕНТ ДЛЯ БОРЬБЫ С НАСЕКОМЫМИ, СОДЕРЖАЩИЙ ЕГО В КАЧЕСТВЕ АКТИВНОГО ИНГРЕДИЕНТА, И СПОСОБЫ ЕГО ПОЛУЧЕНИЯ | 2001 |
|
RU2265603C2 |
| WO 2007028958 A1, 15.03.2007. | |||

