Изобретение относится к способу укладки упаковок без поддонов и упаковок товаров различных размеров на стеллаж товарного склада и извлечения их со стеллажа и управления поставками упаковок, при котором стеллаж товарного склада снабжают автоматическим роботом для укладки и извлечения упаковок и управляют данными товарного склада и поставками при помощи информационной системы и оборудования, которое осуществляет способ.
Система хранения товаров без поддонов известна, среди прочих, из патента США № 6129497, согласно которому ящики с товарами, уложенные без поддонов один на другой, извлекают со стеллажа товарного склада и укладывают на стеллаж. Укладочное устройство движется по рельсам в товарном складе, при этом устройство выполнено с возможностью приема и укладки ящиков с товарами на стеллажи на разных уровнях. На стеллаже может находиться много штабелей рядом друг с другом. Штабель извлекают со стеллажа таким образом, что подъемное средство укладочного устройства захватывает нижнюю сторону нижнего ящика в штабеле, благодаря чему весь штабель может быть поднят и удален вместе с устройством. Ящики находятся на стеллаже таким образом, что подъемное средство может вставляться под них. Это достигнуто благодаря тому, что ящики на стеллаже располагаются на основании, которое меньше их нижней части.
При помощи устройства можно манипулировать ящиками определенного размера, которые составлены друг на друга не больше чем в определенном количестве. В любом случае несущие поддоны не требуются. Управление устройством осуществляют из центра управления в подъемном носителе. В системе содержимое ящиков не идентифицируется.
Для устранения недостатков представленной выше тележки, движущейся и работающей в высоком товарном складе, укладывая и извлекая упаковки товаров без поддонов, разработан новый способ укладки и извлечения упаковок без поддонов со стеллажа и способ управления поставками упаковок, причем способ характеризуется тем, что используемое оборудование принимает упаковку, например, на конвейерную ленту, осуществляет взвешивание упаковки, определяет потребность в необходимом для нее пространстве, считывает дистанционный код, связанный с упаковкой, такой как код радиочастотной идентификации, для выбора пространства на стеллаже, определенного для нее на основе предшествующих функций, и извлекает упаковку со стеллажа под управлением либо команд пользователя, либо информационной системы, причем данные от указанных функций укладки и извлечения передают в информационную систему.
Отличительным признаком оборудования для осуществления способа является то, что укладывающий и извлекающий робот содержит, по меньшей мере, закрытую верхнюю часть, причем возможные закрывающие средства нижней части совместно с закрывающими средствами верхней части запирают, по меньшей мере, низ и боковые стороны пространства для упаковки нижней части, когда нижняя часть поднята и соединена с верхней частью, при этом, дополнительно, нижняя часть содержит передающую платформу для облегчения передачи упаковки и датчики в нижней части, по меньшей мере, для контроля упаковки.
Преимущество способа согласно изобретению заключается в том, что база данных системы остается обновляемой в реальном режиме времени в отношении ее содержимого, поскольку упаковки проходят взвешивание и фотографирование на пути к стеллажам. Поддержание обновляемого состояния базы данных обеспечивает множество других преимуществ, таких как возможность, в связи с завершением хранения, автоматической доставки заказов и, например, следования сроку годности товаров. После приема товаров данные фотографирования и взвешивания поступают в базу данных, что может быть позже проверено. Робот, укладывающий и извлекающий упаковки, устроен так, что он может принимать и перемещать упаковки независимо от их формы и внешних размеров, при условии, что они не превышают верхний предел.
Далее изобретение описано со ссылками на чертежи, на которых:
фиг.1 - вид пункта приема и доставки в товарном складе для укладки и извлечения и автоматического робота для укладки и извлечения, движущегося в товарном складе;
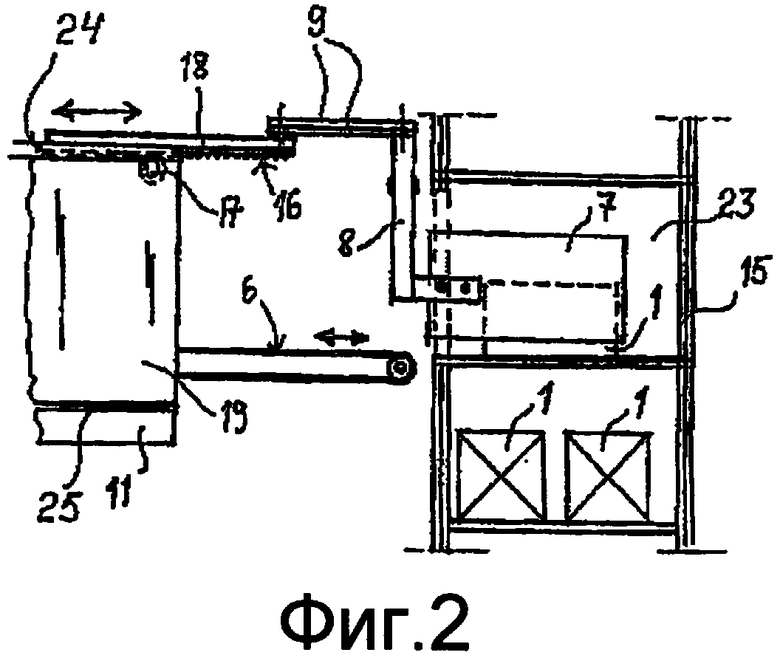
фиг.2 - вид сбоку упаковки с товарами в момент укладки на стеллаж;
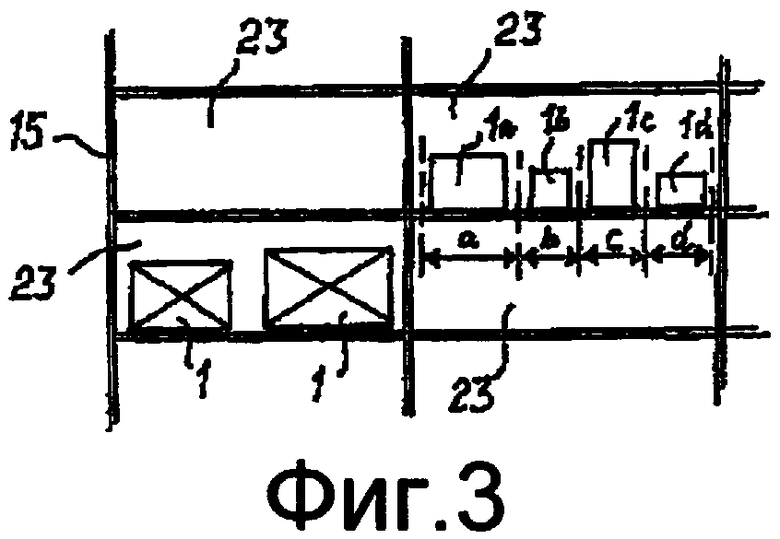
фиг.3 - вид части стеллажа товарного склада с направления извлечения товаров;
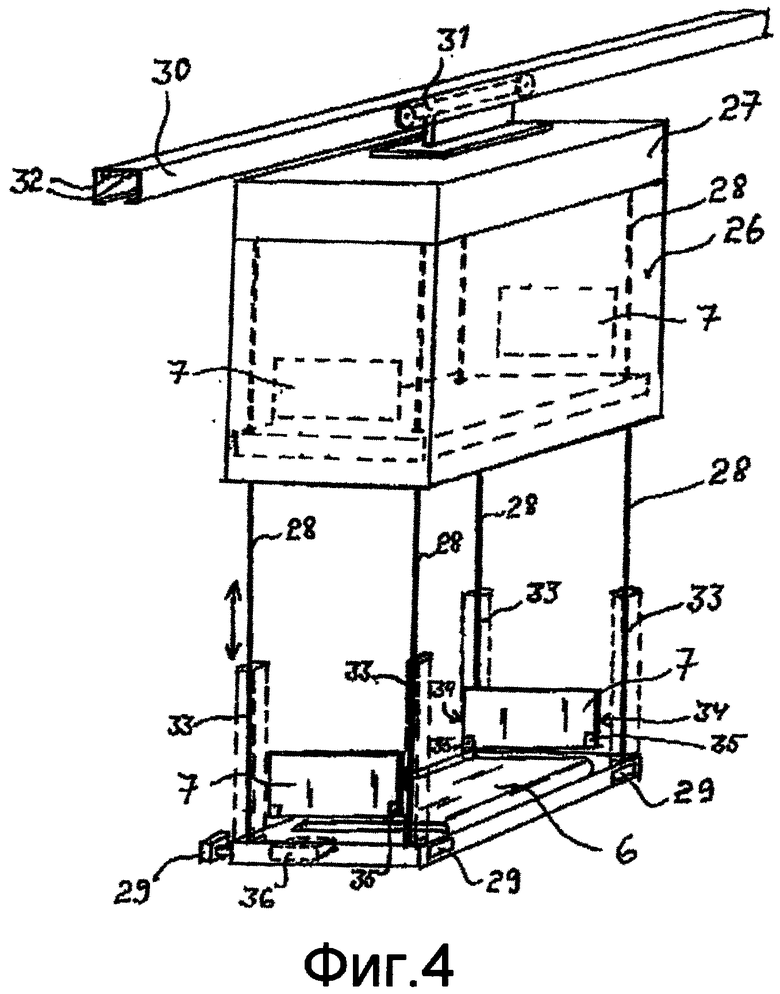
Фиг.4 - вид робота для укладки и извлечения, движущегося по подвесному рельсу; и
Фиг.5 - схематический вид сверху рельса рельсовой системы товарного склада.
На фиг.1 показан пункт 5 приема и доставки, который содержит конвейерную ленту 2, на которую помещена привезенная упаковка с товаром. Упаковка может быть с запакованным или незапакованным товаром и должна стоять, не скатываясь с ее основания. Тот, кто привез упаковку, или пользователь складированных товаров идентифицируется при помощи кода, который может быть передан, например, в компьютер 22, соединенный с пунктом. Когда пользователь идентифицирован, конвейерная лента 2 начинает работать и перемещает упаковку 1 в туннель пункта, причем туннель содержит средство для контроля упаковки. Осуществляется считывание штрихкода на стороне упаковки, кода радиочастотной идентификации (RFID-метки) или любой другой серии знаков, весы 4 ленты взвешивают упаковку, и фотокамера делает ее фотографию. Данные передаются в систему товарного склада как данные, относящиеся к упаковке. Если вес упаковки, данный в коде радиочастотной идентификации, не соответствует результату взвешивания, прием отменяется. Программа распознавания формы также определяет по снимку, сделанному фотокамерой, внешние размеры упаковки. Также можно применять больше фотокамер, делающих снимки с разных направлений. Затем система находит место в товарном складе для упаковки 1 и перемещает ее при помощи ленты 2 к ленте 6 робота 19 для укладки упаковок.
Лента 6 укладочного робота 11, 12, 19 перемещает упаковку между передающими пластинами 7. На этом этапе также можно при помощи передающих пластин 7 тянуть упаковку. Когда упаковка 1 находится на ленте 6 между передающими пластинами 7, робот 11, 12, 19 начинает движение по рельсам 13 в товарном складе. Робот содержит основание 12 с колесами. Робот также имеет высокие вертикальные направляющие 14, на которых расположена платформа 11 для оборудования для подъема на необходимую высоту. Например, на направляющих 14 находятся зубчатые рейки, а на платформе 11 для оборудования находятся вращающиеся зубчатые колеса, при помощи которых платформа для оборудования движется вверх и вниз по направляющим.
На платформе 11 для оборудования также расположена зубчатая передача робота, закрепленная таким образом, что она может поворачивать платформу для оборудования на, по меньшей мере, 90° в боковом направлении, наиболее предпочтительно в обе стороны. Таким образом, робот, движущийся по рельсам между стеллажами, принимает и доставляет товары на стеллажи, расположенные по обе стороны от прохода.
В зубчатой передаче расположены приводные зубчатые колеса передающих пластин 7, при помощи которых пластины 7 могут перемещаться друг к другу и друг от друга. В качестве оборудования применены рычаги 8, проходящие вверх от пластин 7, которые при помощи цилиндра 10 перемещаются друг к другу и друг от друга. Вертикальные рычаги 8 при помощи шарнирных рычагов 9 прикреплены к горизонтальной балке 18, благодаря чему возможно изменение расстояния между пластинами. Когда горизонтальная балка 18 движется относительно другой неподвижной балки на зубчатой передаче, достигается необходимое горизонтальное движение передающих пластин. Сила цилиндра 10 задана такой, что она не сжимает товары слишком сильно. На фиг.1 показан робот, движущийся только по одной паре рельсов. Когда на практике робот должен работать между многими возможными стеллажами в предназначенном для него блоке стеллажей, в соединении с рельсами 13 применяют поперечную систему перемещения в конце ряда стеллажей, например, такую, в которой робот перемещается другим роботом на рельсы между необходимыми стеллажами. Например, рельсы 13 обрываются сразу за роботом, в результате чего колесный ход под роботом устанавливается на платформу, перемещающуюся в поперечном направлении.
Однако более рекомендуемый вариант осуществления изобретения является вариантом такого типа, в котором робот 19 перемещается при помощи собственных колес по ровному основанию, и его система управления точно ведет робот между надлежащими стеллажами и в надлежащее положение и затем поднимает ленту 6 на надлежащую высоту. Благодаря этому решению достигается преимущество, заключающееся в том, что для верхней части 19 робота не требуются отдельные поворотные средства, поскольку робот поворачивается между стеллажами при помощи своих колес.
На фиг.2 показан с одной стороны перенос упаковки 1 в пространство 23 стеллажа. При помощи ленты 6 невозможно направлять упаковку на стеллаж, но окончательное помещение в стеллаж должно осуществляться при помощи передающих пластин 7. Горизонтальное перемещение осуществляется на фиг.2 при помощи балки 18, снабженной зубчатой рейкой 16, которая движется в управляющей балке 24 при помощи зубчатого колеса 17. Блоки стеллажей выбирают по высоте пространства для товаров в соответствии с максимальным размером упаковки. Например, может быть выбрана система, в которой максимальный размер упаковки составляет 400×600×600 и вес составляет 50 кг. Между платформой 11 для оборудования и зубчатой передачей расположены подшипники 25, благодаря чему можно поворачивать верхнюю часть 19, содержащую зубчатую передачу, по меньшей мере, в обе стороны.
На фиг.3 показана передняя сторона стеллажа, в результате чего пространства 23 стеллажа видны в ширину. В системе товарного склада записан контроль распределения интервалов, и пространства 23 стеллажей содержат четыре выбранных интервала a-d разной ширины в соответствии с шириной упаковок 1а-1d. Система запрограммирована для установки упаковок в соответствии с их шириной таким образом, что упаковка 1 может быть расположена в свободном интервале, соответствующем ее ширине.
На фиг.4 показан укладывающий и извлекающий робот 26, движущийся по подвесному рельсу 30 при помощи тележки 31. Робот содержит защитный кожух, в который может быть поднята при помощи тросов 28 нижняя часть для транспортировки товаров. Нижняя часть может опускаться на разные уровни для укладки и приема упаковок 1, когда сначала робот на подвесном рельсе 30 останавливается в надлежащем пункте. Например, в подвесном рельсе 30 приклеена к внутренней поверхности считываемая полоса кода местоположения, благодаря чему схема управления системы постоянно принимает данные о местоположении на рельсе 30. В рельсе 30 также есть пространство для силовых кабелей, по которым электродвигатель тележки 32 получает энергию для его движущей силы. Кроме того, рельс 31 может также содержать антенну для передачи данных. Для движения захватывающих пластин 7 нижней части и конвейерной ленты 6 в нижней части расположены подзаряжаемая батарея и приводные электродвигатели для средств 7, 6. Батарея подзаряжается от подвесного силового кабеля 32, когда нижняя часть поднимается в кожух верхней части. Упаковки 1 движутся, оставаясь в роботе, когда нижняя часть поднята в кожух верхней части. Заключение между нижней частью и верхней частью образовано так, что совместно они закрывают упаковку в кожухе, содержащем, по меньшей мере, дно и боковые стороны. Средство управления тележкой 31 включает блокирование движения, если нижняя часть не поднята. Транспортировка упаковок безопасна, если они перемещаются в области, где возможно присутствие людей.
Когда нижняя часть опущена к желательному стеллажу, например, определенному по контрольным кодам, применяются опоры 29, блокирующие нижнюю часть, которые при помощи силовых узлов отталкиваются к каркасам стеллажей 15 таким образом, что нижняя часть блокируется на месте, когда упаковки перемещаются с нижней части на стеллаж и обратно. Опоры также работают как источник энергии для нижней части, например, при помощи батареи, расположенной в каркасе стеллажа. Например, для надежной работы нижняя часть имеет обнаружитель местоположения стеллажа, благодаря чему нижняя часть может следовать точно до надлежащей высоты. Обнаружитель, например, при помощи ультразвука обнаруживает местоположение каркаса стеллажа. Передние кромки захватывающих пластин 7 в их обоих направлениях снабжены датчиком 34 столкновения, которым является, например, пьезоэлектрическая пленка. Датчик информирует, если передняя кромка пластины 7 сталкивается с упаковкой. Кроме того, передние кромки захватывающих пластин 7 могут иметь фотоэлементы 34, которые обозначают появление упаковки между захватывающими пластинами или отсутствие упаковки между захватывающими пластинами. Кроме того, в одном варианте осуществления изобретения нижняя часть может быть снабжена горизонтальной сетчатой завесой между вертикальными балками 33. Сетчатая завеса указывает, когда упаковка или другое препятствие находится в непосредственной близости к стороне нижней части, и, таким образом, подъем нижней части необязательно осуществляется в пространстве между стеллажами. Сетчатая завеса нужна большей частью на сторонах нижней части, через которые происходит погрузка упаковки. Нижняя часть также содержит батарею 36 как источник энергии для оборудования нижней части. Естественно, указанные оборудование и свойства могут быть приспособлены для захватывающих пластин 7 робота 19, показанного на фиг.1, а также для проема для передачи и боковых частей упаковки.
На фиг.5 показан схематический вид подвесного пути 30, вдоль которого роботы 26 могут двигаться для перемещения в депо 33 или перемещения хранящихся предметов. Для примера на схеме представлены одна область стеллажей, одна область 33 депо и три пункта 5 приема и доставки. Блоки 15 стеллажей, наиболее предпочтительно, расположены ниже подвесного рельса, так что маршрут укладочного робота может пересекать блоки стеллажей. Несколько роботов 26 запрограммированы для движения одновременно по рельсу 30, и программа постоянно отслеживает местоположение роботов и вырабатывает наилучшие маршруты.
Информационная система пунктов 5 приема и доставки передает и принимает при помощи компьютера 22 электрические данные вместе с центральным сервером 21, физически находящимся в другом месте. При этом центральный сервер постоянно сообщается электрическим способом с поставщиками и с операционной системой покупателя. Естественно, компьютер 22, соединенный с блоком, может также сообщаться непосредственно с поставщиками или покупателями.
При поставке товаров поставщик снабжает упаковку дистанционным кодом радиочастотной идентификации и посылает электрическим способом данные кода 20 радиочастотной идентификации в информационную систему товарного склада. Дистанционный код радиочастотной идентификации обычно является наклеиваемым ярлыком и содержит данные заказа, данные количества, идентификационный номер и, возможно, также другие данные, такие как, например, данные пункта назначения груза. Когда упаковка прибывает в пункт стеллажей товарного склада, на выбор расположения на стеллажах 15 влияет вес упаковки и, возможно, также потребность в быстрой укладке упаковки.
Информационная система, включенная в способ, управляет поставками упаковок 1, используя для связи адрес электронной почты, при помощи которого получает доступ к веб-сайтам, и при помощи связи в электронной форме у поставщика заказываются товары (упаковка), и система печатает извещение о перевозке и заказывает груз и транспорт и выписывает счет за транспортировку. Система информирует поставщика о прибытии товаров, передает выбранное местоположение товаров (упаковки) на стеллаже товарного склада в информационную систему, обновляет данные о ситуации в товарном складе, формирует данные о счете и также информирует покупателя о складировании и отправке товаров (упаковки) со стеллажа 15 товарного склада покупателю согласно заказу, полученному от покупателя, с использованием, соответственно, представленных выше необходимых функций.
Если товары (упаковка) отбираются со стеллажа 15 для собственных нужд на основе заказа на хранение, средство управления поставками обновляет содержимое запаса, дает, если необходимо, импульс поручению вследствие уменьшения количества относящихся к делу товаров и указывает убывшие товары к оплате, рабочий номер или соответствующий идентифицированный номер в заказе на хранение.

Оборудование для укладки не имеющих поддонов упаковок различных размеров на стеллажи товарного склада с последующим извлечением упаковок (1) со стеллажей содержит блок стеллажей, информационную систему (22), по меньшей мере, один пункт (5) получения и доставки, который включает в себя обнаружители (4) упаковки (1) и устройство сообщения с информационной системой (22), движущийся робот, который перемещается по подвесному рельсу и укладывает и извлекает не имеющие поддонов упаковки (1). Робот дополнительно содержит нижнюю перемещающую товары часть, верхнюю закрытую часть, подъемные тросы и подъемный электродвигатель, которые опускают перемещающую товары часть относительно верхней части к различным уровням стеллажа и поднимают перемещающую товары часть в укрытое положение, при этом в укрытом положении верхняя часть закрывает нижнюю часть вместе с упаковкой (1) на ней, и передающее устройство (6, 7) в нижней части, которое перемещает не имеющие поддонов упаковки (1). Изобретение обеспечивает улучшение эксплуатационных характеристик при работе с упаковками. 2 з.п. ф-лы, 5 ил.
1. Оборудование для укладки не имеющих поддонов упаковок (1) различных размеров на стеллажи (15) товарного склада с последующим извлечением упаковок (1) со стеллажей (15) и для управления поставками упаковок (1), содержащее
блок стеллажей (15) на товарном складе,
информационную систему (22),
по меньшей мере, один пункт (5) получения и доставки, который включает в себя обнаружители (4) упаковки (1) и устройство сообщения с информационной системой (22),
подвесной рельс (30) товарного склада,
движущийся робот (26), который перемещается по подвесному рельсу (30) и укладывает и извлекает не имеющие поддонов упаковки (1) относительно блока стеллажей (15), причем укладывающий и извлекающий робот (26) содержит движущее оборудование для перемещения по подвесному рельсу (30),
средство для определения местоположения движущегося робота (26) на выбранном рельсе (30),
отличающееся тем, что движущийся робот (26) дополнительно содержит
нижнюю перемещающую товары часть,
верхнюю закрытую часть,
подъемные тросы (28) и подъемный электродвигатель, которые опускают перемещающую товары часть относительно верхней части к различным уровням стеллажа и поднимают перемещающую товары часть в укрытое положение, при этом в укрытом положении верхняя часть закрывает нижнюю часть вместе с упаковкой (1) на ней, и
передающее устройство (6, 7) в нижней части, которое перемещает не имеющие поддонов упаковки (1), имеющие различные размеры, в боковом направлении на нижнюю часть или с нижней части.
2. Оборудование по п.1, отличающееся тем, что дополнительно содержит блокирующее устройство, которое предотвращает перемещение робота (26) по рельсу (30), если нижняя часть не поднята в укрытое положение в верхней части.
3. Оборудование по п.1, отличающееся тем, что передающее устройство включает в себя конвейерную ленту (6) и передающие пластины (7), которые выполнены перемещаемыми друг к другу и друг от друга.
| US 6129497А, 10.10.2000 | |||
| ГРУЗОВАЯ ПОДВЕСКА МОНОРЕЛЬСОВОЙ ДОРОГИ | 0 |
|
SU373225A1 |
| Склад штучных грузов | 1983 |
|
SU1131778A1 |
| Манипулятор | 1985 |
|
SU1265039A1 |
| Транспортное устройство для автоматических линий | 1976 |
|
SU663549A1 |
| ЕР 1122194 А1, 08.08.2001 | |||
| JP 2005047696 А, 24.02.2005 | |||
| US 5793637 A, 11 | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| JP 2003104554 A, 09.04.2003 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| JP 60015302 А, 26.01.1985; | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

