Изобретение относится к области радиолокации и может быть использовано для обнаружения траекторий воздушных объектов с помощью радиолокационных станций (РЛС) кругового обзора, снабженных антенной с механическим вращением по азимуту.
Известен способ обнаружения траектории объекта, включающий обнаружение объекта в процессе регулярного осмотра зоны обзора РЛС, обнаружение объекта в стробах захвата и подтверждения траектории при постоянном периоде регулярного осмотра зоны обзора (Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. «Радио и связь», Москва, 1993, с.26-28).
Недостатком известного способа является значительное увеличение размеров стробов захвата и стробов подтверждения траектории при обнаружении траектории скоростных и маневрирующих объектов. Увеличение размеров стробов приводит к увеличению затрат временных и энергетических ресурсов, требуемых на осмотр стробов захвата и подтверждения траектории. В результате происходит перегрузка системы обработки радиолокационной информации, уменьшается пропускная способность РЛС.
Наиболее близкий способ обнаружения траектории объекта в заданном секторе по азимуту по заданному критерию обнаружения траектории с помощью радиолокационной станции кругового обзора, снабженной антенной с механическим вращением по азимуту, включает Ко последовательных осмотров заданного сектора по азимуту с изменяющимся направлением вращения антенны и осмотр зоны обзора вне заданного сектора по азимуту (патент РФ №2347236).
В наиболее близком способе интервал времени между обращениями к объектам вне заданного сектора по азимуту ТВ определяется из следующих выражений:
где tС - время осмотра заданного сектора по азимуту при неизменном направлении вращения антенны (однократного осмотра);
N - количество однократных осмотров заданного сектора по азимуту в процессе последовательного осмотра;
ТО - период обзора зоны в отсутствие заданного сектора по азимуту.
Порядок осмотра заданного сектора и зоны обзора вне его (направление вращения антенны и порядок его изменения) в наиболее близком способе показан на фиг.1.
Затраты времени на осмотр заданного сектора по азимуту, требуемые для обнаружения траектории цели (Ко последовательных осмотров заданного сектора по азимуту), в наиболее близком способе определяются временем, в течение которого будет обнаружена траектория объекта, и при длительном процессе обнаружения траектории (большой величине Ко) могут достигать больших значений, что приводит к существенному увеличению интервала времени между обращениями к объектам вне заданного сектора по азимуту и, вследствие этого, к ухудшению характеристик сопровождения объектов в этой части зоны обзора.
Решаемой задачей (техническим результатом), таким образом, является уменьшение интервала времени между обращениями к объектам вне заданного сектора по азимуту.
Указанный результат достигается тем, что в способе обнаружения траектории объекта в заданном секторе по азимуту по критерию вида k/n+p/m, где n и m - заданное количество обращений к объекту на этапе завязки и подтверждения траектории объекта соответственно, k и р - заданное минимальное количество обнаружений объекта на этапе завязки и подтверждения траектории соответственно, с помощью радиолокационной станции кругового обзора, снабженной антенной с механическим вращением по азимуту, включающем Ко осмотров заданного сектора по азимуту с изменяющимся направлением вращения антенны и осмотр зоны обзора вне заданного сектора по азимуту, согласно изобретению заданный сектор по азимуту осматривают на каждом обороте антенны, при этом количество осмотров сектора Kо определяют из выражения:

Суть заявляемых технических решений заключается в следующем.
Обнаружение траекторий объектов в обзорных РЛС часто осуществляется в пределах заранее заданных секторов по азимуту, границы которых определяют по внешнему целеуказанню от средств разведки, например космической.
Известно, что в обзорных РЛС при обнаружении траектории объекта применяют критерий обнаружения вида k/m+p/n (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: «Сов. радио», 1974, с.279-282). Первая часть критерия (k/m) - завязка траектории - означает, что для обнаружения траектории необходимо, чтобы объект был обнаружен не менее чем в k из m последовательных к нему обращениях (обычно полагают k=2, m=2), вторая часть критерия (р/n) - подтверждение завязанной траектории - означает, что после выполнения первой части критерия объект должен быть обнаружен еще не менее чем в р из n последовательных обращениях. При обнаружении траектории скоростных и маневрирующих объектов часто этап подтверждения завязанной траектории не используют. Критерий обнаружения траектории скоростных и маневрирующих объектов может иметь вид 2/2 (полагают: k=2, m=2, p=0).
В заявляемом способе осмотр заданного сектора по азимуту на каждом обороте антенны осуществляют последовательными осмотрами с изменением направления вращения антенны после каждого осмотра, кроме последнего. Количество осмотров сектора на каждом обороте антенны Ко задают исходя из длины заданного критерия обнаружения траектории таким образом, чтобы количество обращений к объекту было достаточным для проверки заданного критерия, то есть в соответствии с формулой (2).
После проведения Ко осмотров заданного сектора по азимуту осматривается зона обзора вне сектора.
Малый интервал времени между обращениями к объекту в заданном секторе обеспечивается последовательными прямыми и обратными осмотрами сектора за счет переключения направления вращения антенны.
Если при осмотре заданного сектора решение об обнаружении траектории объекта принято, то координаты траектории выдаются потребителю.
Направление вращения антенны при осмотре зоны обзора после Ко осмотров заданного сектора совпадает с направлением ее вращения при последнем осмотре сектора, поэтому, в зависимости от критерия обнаружения траектории, точнее от величины Ко, направление вращения антенны может как совпадать, так и не совпадать с направлением вращения антенны непосредственно перед входом в заданный сектор (в отличие от прототипа, где направление вращения антенны при осмотре зоны вне заданного сектора всегда одно и то же). Так, если значение Ко нечетно, то направление вращения антенны после выхода из заданного сектора совпадает с направлением вращения до входа в него, если значение Ко четно, то направление вращения антенны после выхода из заданного сектора противоположно направлению вращения до входа в сектор.
Процесс осмотра заданного сектора и зоны обзора вне сектора повторяется до тех пор, пока траектория объекта не будет обнаружена.
На фиг.2 для примера показан порядок осмотра заданного сектора по азимуту и зоны обзора вне его при критерии обнаружения траектории 2/2 (показан осмотр па двух оборотах антенны). Количество осмотров заданного сектора на каждом обороте антенны при этом критерии равно двум (Ко=2). Из фиг.2 видно, что, поскольку для данного критерия величина Ко четна, то направление вращения антенны после выхода из заданного сектора противоположно направлению вращения до входа в сектор.
Интервал времени между обращениями к объектам вне заданного сектора (ТB) для заявляемого технического решения определяется из выражений:
Во втором выражении левая граница указанного интервала относится к объектам, расположенным в зоне обзора вне заданного сектора вблизи первой по ходу вращения антенны азимутальной границы, правая граница интервала относится к объектам, расположенным в зоне обзора вне заданного сектора вблизи второй по ходу вращения антенны азимутальной границы.
Из выражений (3) следует, что интервал времени между обращениями к объектам вне заданного сектора, в отличие от прототипа, не зависит от длительности процесса обнаружения траектории в секторе, а определяется длиной критерия обнаружения траектории, то есть величиной Ко.
Таким образом достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - направление вращения антенны и порядок его изменения в наиболее близком способе при осмотре заданного сектора по азимуту и зоны обзора вне его.
Фиг.2 - направление вращения антенны и порядок его изменения в заявляемом способе при осмотре заданного сектора по азимуту при критерии обнаружения траектории объекта 2/2 и зоны обзора вне заданного сектора; показан осмотр заданного сектора на двух оборотах антенны.
Фиг.3 - скорость вращения антенны при осмотре заданного сектора по азимуту в заявляемом способе для критерия обнаружения траектории объекта 2/2;
обозначено: t - координатная ось текущего времени; ω - координатная ось скорости вращения антенны; ωро - заданная скорость вращения антенны при осмотре зоны обзора.
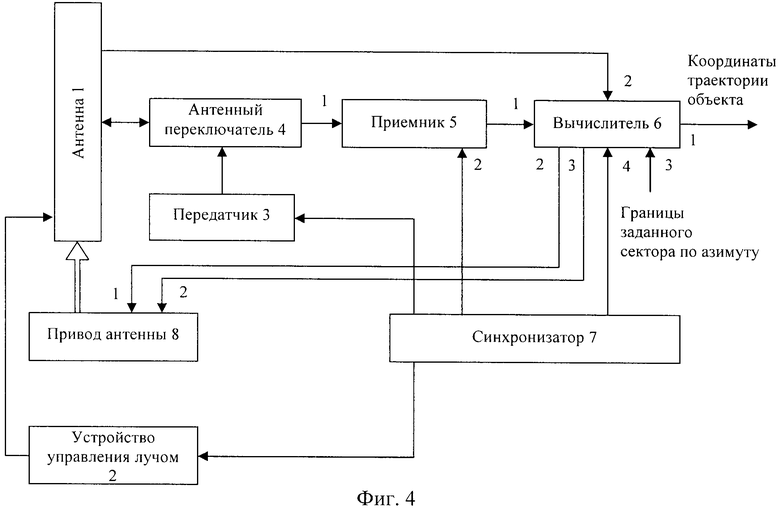
Фиг.4 - блок-схема РЛС, реализующей заявляемый способ.
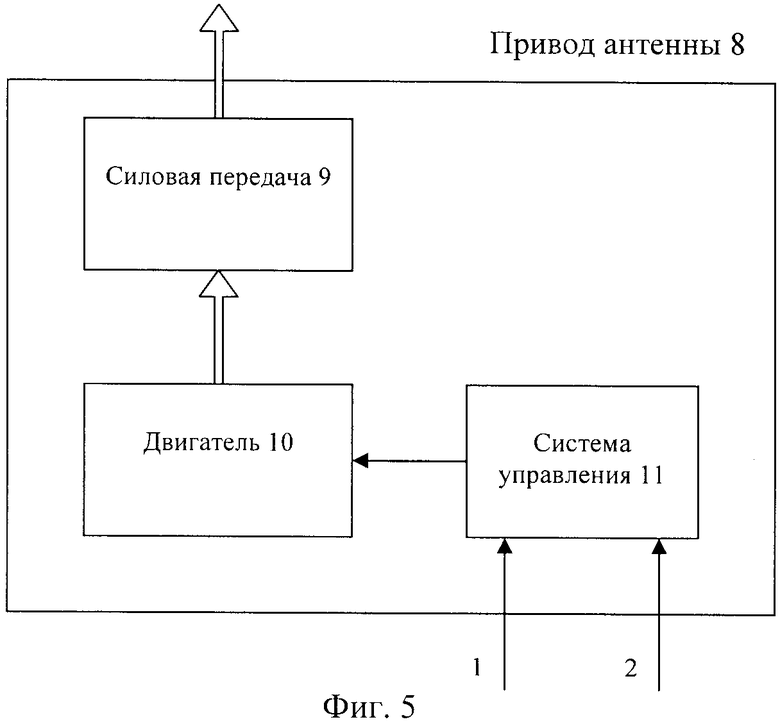
Фиг.5 - блок-схема привода антенны 8.
Радиолокационная станция, реализующая заявляемый способ (фиг.4), содержит антенну 1, устройство управления лучом 2, выход которого соединен с антенной 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, выполняющий операции обнаружения траектории объекта и управления скоростью и направлением вращения антенны 1, первый выход которого является выходом РЛС, а также синхронизатор 7 и привод антенны 8, механически соединенный с антенной 1, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, второй и третий выходы вычислителя 6, являющиеся соответственно выходом сигнала, пропорционального величине скорости вращения антенны 1, и выходом сигнала направления вращения антенны 1, соединены соответственно с первым и со вторым входами привода антенны 8, на третий вход вычислителя 6 подаются координаты границ заданного сектора по азимуту, четыре выхода синхронизатора 7 соединены соответственно со входом устройства управления лучом 2, входом передатчика 3, вторым входом приемника 5 и с четвертым входом вычислителя 6.
Привод антенны 8 (фиг.5) состоит из силовой передачи 9, двигателя 10 и системы управления 11, при этом вал двигателя 10 механически соединен со входом силовой передачи 9, которая механически соединена с антенной 1, а электрический вход двигателя 10 соединен с выходом системы управления 11, первый и второй входы которой являются соответственно входом сигнала, управляющего скоростью вращения антенны, и входом сигнала, управляющего направлением вращения антенны.
РЛС, реализующая заявляемый способ, может быть выполнена с использованием следующих функциональных элементов.
Антенна 1 - фазированная антенная решетка с одномерным электронным сканированием по углу места и механическим вращением по азимуту (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М.: «Сов. радио», 1977, с.138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении по углу места (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М.: «Сов. радио», 1977, с.141-143).
Передатчик 3 - многокаскадный импульсный передатчик на клистроне, выполненный на основе известного передатчика (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.278-279, рис.7.2).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. Военное издательство, 1967, с.166-168).
Приемник 5 - супергетеродинный приемник, выполненный на основе известного приемника (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.343-344, рис.8.1).
Вычислитель 6 - цифровой вычислитель. В вычислителе 6 реализуется известный алгоритм обнаружения траектории объекта (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., «Сов. радио», 1974, с.285-287).
Синхронизатор 7 выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова, с.602-603).
Привод антенны 8 - привод (Российский энциклопедический словарь, кн.2, М., «Большая Российская Энциклопедия», 2000, стр.1248).
Двигатель 9 - машина постоянного тока (Брускин Д.Э., Зорохович А.Е., Хвостов B.C. Электрические машины, ч.2. М.: «Высшая школа», 1987, стр 195-203).
Силовая передача 10 - редуктор (Типугин В.Н., Вейцель В.А. Радиоуправление. М.: «Сов. радио», 1962, стр.578).
Система управления 11 - блок управления скоростью и направлением вращения вала двигателя. Методы управления скоростью и направлением вращения вала двигателя описаны в источнике: Брускин Д.Э., Зорохович А.Е., Хвостов B.C. Электрические машины, ч.2. М.: «Высшая школа», 1987, стр.281-287.
Рассмотрим работу РЛС для критерия обнаружения траектории 2/2.
В процессе осмотра зоны обзора РЛС по сигналам устройства управления лучом 2 осуществляется электронное перемещение луча антенны 1 по углу места, а за счет вращения антенны 1 происходит его перемещение по азимуту. При этом на передатчик 3 по командам синхронизатора 7 поступают импульсы запуска, обеспечивающие излучение зондирующего сигнала в последовательно осматриваемые направления зоны обзора РЛС.
Отраженный от объекта сигнал через антенну 1 и антенный переключатель 4 поступает в приемник 5, где преобразуется на промежуточную частоту, фильтруется, усиливается. На второй вход вычислителя 6 с координатного выхода антенны 1 поступают координаты луча антенны, а с выхода приемника 5 - отфильтрованный и усиленный сигнал. В вычислителе 6 сигнал, отраженный от объекта, сравнивается с порогом обнаружения, при превышении которого принимается решение об обнаружении объекта. С синхронизатора 7 сигнал на четвертый вход вычислителя 6 подается в момент излучения зондирующего сигнала. По величине задержки зондирующего сигнала в вычислителе 6 по известным формулам (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. М.: «Сов. Радио», 1970, стр.221) определяется дальность до обнаруженного объекта.
Координаты заданного сектора по азимуту от внешнего источника целеуказания поступают на третий вход вычислителя 6. Текущая азимутальная координата луча антенны 1 поступает на второй вход вычислителя 6, где сравнивается с азимутальным положением границ заданного сектора по азимуту. По достижении азимутальным положением луча антенны заданного сектора по азимуту реализуется последовательность Ко его осмотров (фиг.2, фиг.3).
Осмотр заданного сектора по азимуту начинается при направлении вращения антенны, совпадающем с направлением ее вращения при осмотре зоны обзора до входа в заданный сектор, то есть производится осмотр сектора в прямом направлении. Осмотр в прямом направлении начинается в момент времени t1 (фиг.3). При достижении лучом антенны азимутального положения, определяемого скоростью вращения антенны ωро и положением азимутальных границ заданного сектора, в момент времени t2 начинается замедление вращения антенны от скорости ωро до полной ее остановки в конце первого осмотра сектора в момент времени t3. Для этого со второго выхода вычислителя 6 на первый вход привода антенны 8 в момент времени t2 подается сигнал на торможение вращения антенны 1, которое заканчивается в момент t3.
Второй осмотр заданного сектора начинается в момент времени t3. При этом направление вращения антенны изменяется, то есть осмотр сектора проводится в обратном направлении. По командам со второго и третьего выходов вычислителя 6 на первый и второй входы привода антенны 8 соответственно в момент времени t3 начинается ускорение вращения антенны до скорости -ωро, которое заканчивается в момент t4. Второй осмотр заданного сектора продолжается до момента времени t5, по окончании которого проверяется критерий обнаружения объекта 2/2, и при его выполнении координаты обнаруженной траектории выдаются потребителю с первого выхода вычислителя 6.
В момент времени t5 заканчиваются Kо осмотров заданного сектора и без изменения скорости и направления вращения до момента времени t6 осуществляется осмотр зоны обзора вне заданного сектора. Если при осмотре заданного сектора траектория объекта не была обнаружена, то по окончании осмотра зоны обзора вне заданного сектора в момент времени t6 осмотр заданного сектора повторяется.
Таким образом, заявляемое устройство обеспечивает достижение заявляемого технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| Способ радиолокационного обзора пространства | 2017 |
|
RU2676673C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2013 |
|
RU2548682C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
| Способ радиолокационного обзора | 2016 |
|
RU2626407C1 |
| СПОСОБ ИСПЫТАНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2008 |
|
RU2400766C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2016 |
|
RU2611434C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА, ОТДЕЛИВШЕГОСЯ ОТ ОБЪЕКТА-НОСИТЕЛЯ | 2007 |
|
RU2345383C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |


Изобретение относится к области радиолокации и может быть использовано для обнаружения траекторий воздушных объектов с помощью радиолокационных станций (РЛС) кругового обзора с антенной, выполненной в виде фазированной антенной решетки (ФАР) с механическим вращением по азимуту. Достигаемым техническим результатом изобретения является уменьшение интервала времени между обращениями к объектам вне заданного сектора по азимуту. Указанный результат обеспечивается тем, что в способе обнаружения траектории объекта в заданном секторе по азимуту по критерию вида k/m+p/n осмотр заданного сектора по азимуту осуществляют на каждом обороте антенны по Ко последовательных осмотров с изменением направления вращения антенны, при этом заданный сектор по азимуту осматривают Ко раз на каждом обороте антенны, величину Ко определяют из выражения:
где n, m - заданное количество обращений к объекту на этапе завязки и подтверждения траектории объекта соответственно; k, р - заданное минимальное количество обнаружений объекта на этапе завязки и подтверждения траектории соответственно. 5 ил.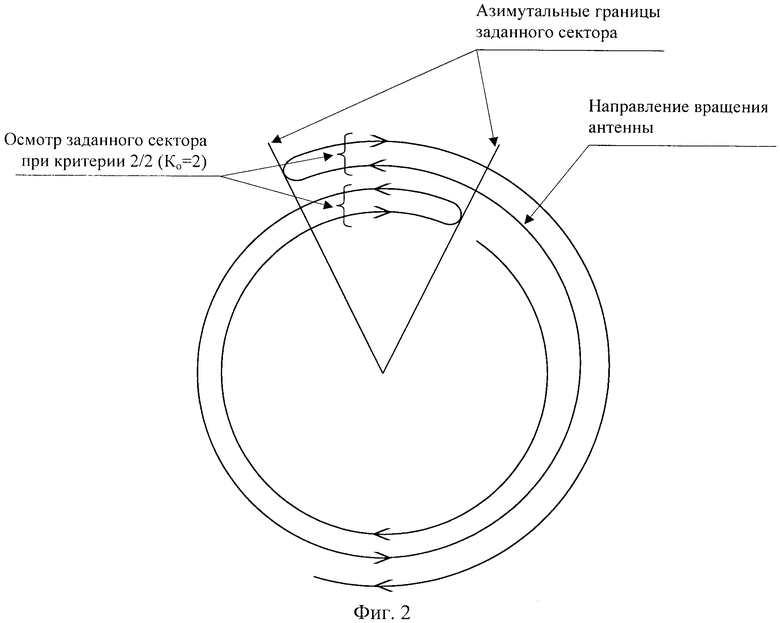
Способ обнаружения траектории объекта в заданном секторе по азимуту по критерию вида k/n+p/m, где n и m - заданное количество обращений к объекту на этапе завязки и подтверждения траектории объекта соответственно, k и р - заданное минимальное количество обнаружений объекта на этапе завязки и подтверждения траектории соответственно, с помощью радиолокационной станции кругового обзора, снабженной антенной с механическим вращением по азимуту, включающий Ко осмотров заданного сектора по азимуту с изменяющимся направлением вращения антенны, и осмотр зоны обзора вне заданного сектора по азимуту, отличающийся тем, что заданный сектор по азимуту осматривают Ко раз на каждом обороте антенны, при этом величину Ко определяют из выражения:

| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2002 |
|
RU2218581C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2007 |
|
RU2339970C1 |
| US 6147638 A, 14.11.2000 | |||
| US 5422829 A, 06.06.1996 | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДОГРЕВАНИЯ ВОЗДУХА ПРИ НАЛОЖЕНИИ ПНЕЙМОТОРАКСА | 1925 |
|
SU4401A1 |

