Изобретение относится к области радиолокации, в частности к области испытаний радиолокационных станций (РЛС) с двумерными фазированными антенными решетками (ФАР).
Испытание является наиболее достоверным способом оценки характеристик РЛС (Натурный эксперимент: Информационное обеспечение экспериментальных исследований / А.Н.Белюнов, Г.М.Солодихин, В.А.Солодовников и др. /Под ред. Н.И.Баклашова. - М.: Радио и связь, 1982, с.13-15). В процессе испытания определяют все основные характеристики РЛС: дальность обнаружения целей, дальность обнаружения траекторий целей, количество сопровождаемых траекторий целей, точность измерения координат и другие. Испытание РЛС представляет собой технически и организационно сложный, дорогостоящий и продолжительный этап. Поэтому упрощение и удешевление испытания при сохранении достоверности является чрезвычайно актуальной задачей.
Известен способ испытания РЛС, использующий математическое моделирование (Леонов А.И., Васенев В.Н., Гайдуков Ю.И. Моделирование в радиолокации. - М.: Советское радио, 1979, с.25-31). Способ основан на замене реальных сигналов, отраженных от целей, их математическими моделями. Моделируемые величины подаются в систему обработки радиолокационной информации РЛС вместо реальных сигналов, производится многократное обнаружение моделируемых сигналов и измерение координат целей в различных режимах работы РЛС, по окончании испытания проводят статистическую обработку измерений.
Недостаток известного способа состоит в необходимости обеспечения адекватности моделей реальным процессам, что требует их тщательной калибровки с использованием эталонных РЛС. Это приводит к значительному усложнению, а следовательно, и к удорожанию способа.
Наиболее близким к заявляемому и широко используемым на практике является способ испытания РЛС, включающий создание натурной целевой и помеховой радиолокационной обстановки с использованием целей и постановщиков помех, пускаемых по заданным траекториям, обнаружение, захват и сопровождение целей, статистическую обработку измеренных параметров траекторий целей (Леонов А.И., Леонов С.А., Нагулинко Ф.В. Испытания РЛС. Оценка характеристик. - М.: Радио и связь, 1990, с.3, с.25).
Основными недостатками наиболее близкого способа являются значительное количество технических средств, требуемых для проведения испытаний, а следовательно, и его высокая стоимость. Это объясняется тем, что испытание такого сложного устройства как РЛС связано с целым рядом дорогостоящих организационных и технических мероприятий, включающих обеспечение полетов целей (самолетов, вертолетов, ракет и других объектов различных классов и назначения) в зоне обзора РЛС по заданным траекториям, привлечение специальных постановщиков помех, аппаратуры регистрации измерений и оценки результатов испытания.
С учетом того, что для получения достоверных оценок параметров РЛС количество пусков целей по одинаковым траекториям должно быть достаточно большим (десятки), стоимость испытаний становится чрезвычайно большой.
Решаемой задачей (техническим результатом) является уменьшение количества пусков целей при испытаниях РЛС при сохранении достоверности испытаний.
Указанный технический результат достигается тем, что в способе испытания РЛС с двумерной фазированной антенной решеткой, предназначенной для обнаружения и сопровождения целей в зоне обзора с периодом обзора Т0, включающем создание натурной целевой и помеховой радиолокационной обстановки с использованием целей и постановщиков помех, пускаемых по заданным траекториям, обнаружение, захват и сопровождение целей, статистическую обработку измеренных параметров траекторий целей, согласно изобретению указанную радиолокационную обстановку создают в секторе зоны обзора Ω размером по азимуту ΔβΩ, не превышающем сектор электронного сканирования по азимуту ΔβΩ≤ΔβЭ, в процессе испытания РЛС сектор Ω осматривают при неподвижной антенне с использованием электронного сканирования группами осмотров по n осмотров в группе, где n=В/ΔβΩ, с периодом каждого осмотра Т0/n, при этом отраженным сигналам, обнаруженным в секторе Ω при k-м его осмотре в группе, где k=1, 2,…, n, присваивают порядковый номер этого осмотра k, причем нумерацию осмотров сектора Ω повторяют в каждой группе осмотров, отраженные сигналы из разных групп осмотров, но с одинаковыми порядковыми номерами k, считают сигналами, отраженными от одной и той же цели при k-м ее залете по заданной траектории.
Суть предлагаемого способа состоит в следующем.
В изобретении используется присущее двумерной ФАР свойство быстрого перемещения луча в пределах сектора электронного сканирования. Размер сектора электронного сканирования по каждой угловой координате (ΔβЭ - по азимуту, ΔεЭ - по углу места) ограничен допустимым уменьшением коэффициента усиления антенны при отклонении луча от положения нормали антенны и в большинстве случаев равен ±30-±35° (т.е. как сектор ΔβЭ, так и сектор ΔεЭ - не более 60-70°). Сектор электронного сканирования обычно охватывает всю зону обзора по углу места Е. По азимуту же, в случае кругового осмотра зоны обзора В, кроме электронного сканирования, осуществляется еще и вращение антенны.
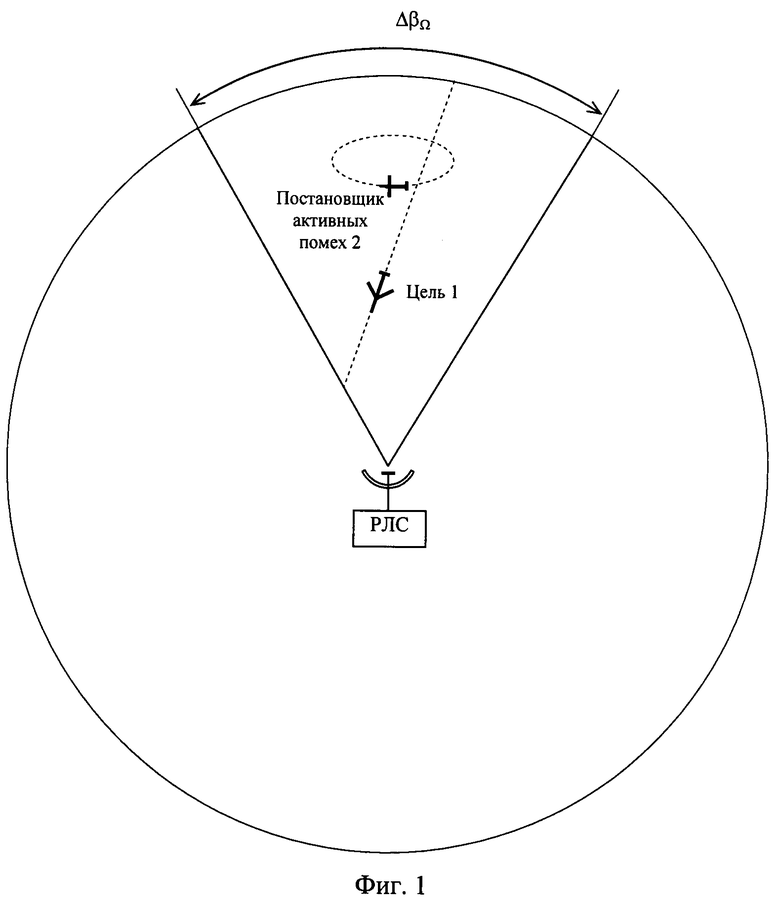
Технический результат в заявляемом способе достигается за счет того, что при испытании РЛС вместо обзора всей зоны обзора осматривается только сектор Ω, т.е. n-я ее часть (фиг.1):

в которой создается натурная целевая и помеховая обстановка. Сектор Ω имеет размеры: по углу места и дальности - соответственно ЕΩ и RΩ, по азимуту - в пределах сектора ΔβΩ.
В процессе испытания РЛС сектор Ω осматривается при неподвижной антенне (без вращения) с помощью электронного сканирования с периодом ТΩ в n раз меньшим, чем период обзора Т0 (ТΩ=Т0/n), группами осмотров по n осмотров в группе (фиг.2а). Таким образом, суммарное время осмотра сектора Ω группой из n осмотров равно периоду обзора Т0.
Отраженным сигналам, обнаруженным в секторе Ω при k-м (k=1, 2, …, n) его осмотре в группе, присваивается порядковый номер этого осмотра (k). Нумерация осмотров сектора Ω повторяется в каждой группе осмотров.
Отраженные сигналы из разных групп осмотров, но с одинаковыми порядковыми номерами k, считаются сигналами, отраженными от одной и той же цели при k-м ее залете по заданной траектории (залет - один из нескольких полетов цели по заданной траектории при одном ее пуске). В результате, за один пуск цели по заданной траектории в секторе Ω производится ее обнаружение, захват и сопровождение, эквивалентное n ее залетам по этой траектории. При этом каждый залет отличается только моментом появления цели в пределах сектора Ω (фиг 2б - фиг.2г).
Таким образом, в заявляемом техническом решении за счет создания радиолокационной обстановки в секторе Ω с азимутальным размером, в n раз меньшим зоны обзора по азимуту В и его осмотра, с периодом ТΩ меньшим, чем период обзора Т0, сокращается количество пусков целей и постановщиков помех, требуемых для создания радиолокационной обстановки при испытаниях РЛС. Уменьшается в связи с этим и стоимость испытаний.
Поскольку количество измерений параметров траекторий целей, находящихся в секторе Ω, за счет более частого осмотра сектора (с помощью электронного сканирования) увеличивается также в n раз, то общее количество измерений при испытаниях остается тем же, что в наиболее близком техническом решении, то есть достоверность испытаний сохраняется на прежнем уровне.
Рассмотрим пример использования заявляемого способа при испытании РЛС с круговым обзором (В=360°) и периодом осмотра зоны обзора, равным Т0=12 с. Двумерное электронное сканирование в РЛС осуществляется в азимутальном секторе ΔβЭ=60° и во всей зоне по углу места. Для испытания РЛС радиолокационная обстановка создается в секторе Ω с азимутальным размером ΔβΩ=60° с помощью одной цели, пускаемой по заданной траектории. Поскольку величина n в данном примере равна n=360°/60°=6, то сектор Ω осматривается с помощью электронного сканирования при неподвижной антенне с периодом ТΩ=Т0/n=12/6=2 с (фиг.2а).
При первом (k=1) осмотре сектора Ω в группе осмотров обнаруженные сигналы относят к первому залету цели по заданной траектории (фиг.2б), при втором осмотре (k=2) - ко второму залету (фиг.2в) и т.д., при шестом осмотре (k=6) - к шестому залету. В результате за один пуск цели в каждом интервале времени, равном периоду обзора Т0=12 с, на захват и сопровождение траекторий поступают координаты цели по 6 ее залетам. По окончании испытаний измеренные параметры траекторий статистически обрабатываются и делаются выводы о параметрах испытываемой РЛС.
Таким образом достигается заявляемый технический результат - уменьшение количества пусков целей при испытаниях РЛС при сохранении достоверности испытаний.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - круговая зона обзора РЛС по азимуту и азимутальный сектор ΔβΩ, в котором одна цель 1 и один постановщик активных помех 2 движутся по заданным траекториям (траектории обозначены штриховыми линиями).
Фиг.2а - диаграмма, показывающая положения отраженных сигналов от одной цели (обозначены точками) по азимуту в осматриваемом секторе Ω с азимутальным размером ΔβΩ в зависимости от времени t при движении цели по заданной траектории (обозначена штриховой линией).
Фиг.2б - фиг.2г - диаграммы, показывающие распределение обнаруженных в секторе Ω сигналов между залетами одной цели: первом (k=1) осмотре сектора Ω в группе осмотров (группа осмотров состоит из n=6 осмотров) обнаруженные сигналы относят к первому залету цели (фиг.2б), при втором (k=2) - ко второму залету цели (фиг.2в) и т.д., при шестом (k=6) - к шестому залету цели (фиг.2г).
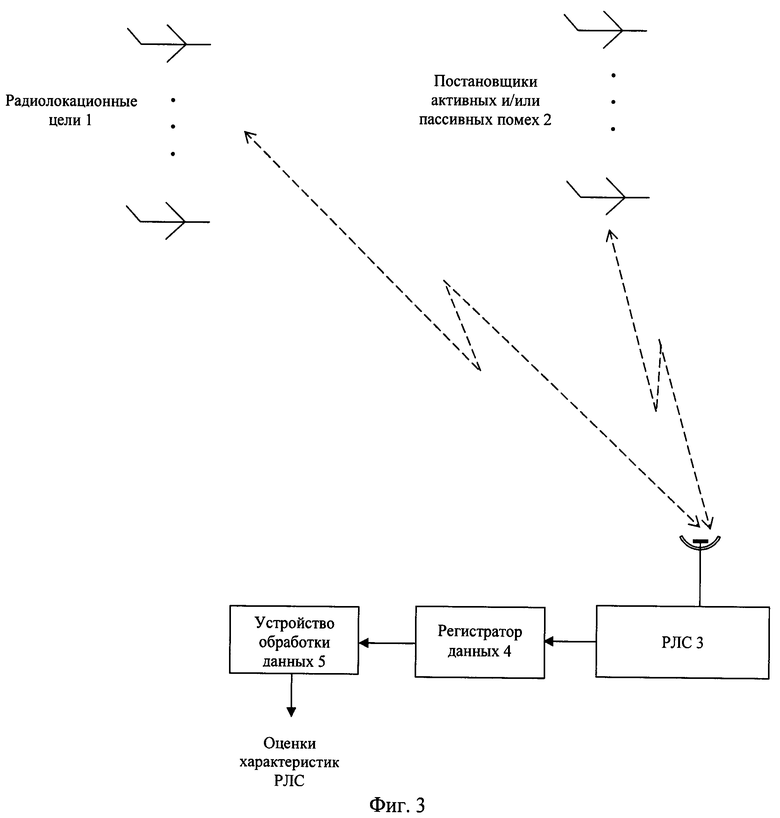
Фиг.3 - блок-схема испытательного комплекса, реализующего заявляемый способ.
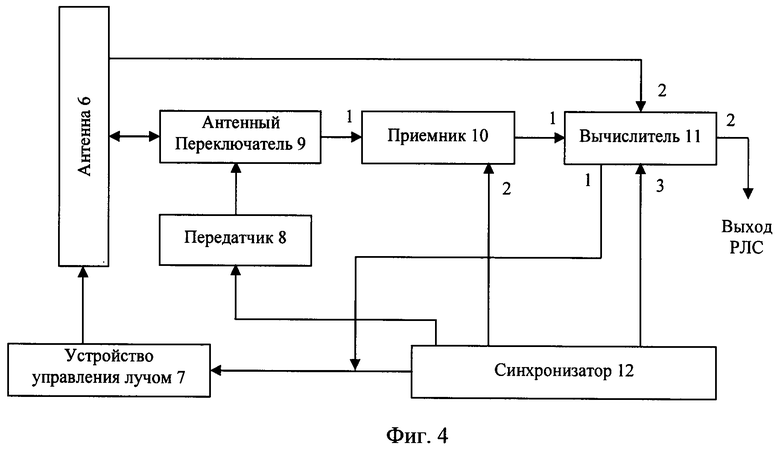
Фиг.4 - блок-схема РЛС, входящей в испытательный комплекс.
Испытательный комплекс, реализующий заявляемый способ (фиг.3), содержит цели 1 (одна или более), постановщики активных и/или пассивных помех 2 (один или более), РЛС 3, регистратор данных 4, устройство статистической обработки данных 5. При этом выход РЛС 3 соединен с последовательно соединенными регистратором данных 4 и устройством обработки данных 5, выход устройства обработки данных 5 является выходом испытательного комплекса.
РЛС 3 (Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию: Пер с англ. - М.: Радио и связь, 1986, стр.19) содержит (фиг.4) антенну 6, устройство управления лучом 7, выход которого соединен с антенной 6, последовательно соединенные передатчик 8, антенный переключатель 9, приемник 10 и вычислитель 11, предназначенный для вычисления координат обнаруженных целей, захват и сопровождение их траекторий, а также синхронизатор 12, при этом сигнальный вход/выход антенны 6 соединен со входом/выходом антенного переключателя 9, а координатный ее выход - со вторым входом вычислителя 11, четыре выхода синхронизатора 12 соединены соответственно со входом устройства управления лучом 7, входом передатчика 8, вторым входом приемника 10 и с третьим входом вычислителя 11, первый выход вычислителя 11 соединен со входом устройства управления лучом 7, а второй его выход является выходом РЛС 3.
Испытательный комплекс работает следующим образом. В секторе Ω зоны обзора РЛС 3 с помощью одной или нескольких целей 1 и постановщиков активных и/или пассивных помех 2 в соответствии с заданной программой испытаний создается радиолокационная обстановка.
В процессе испытания РЛС цели 1 перемещаются в секторе Ω по заданным траекториям. Постановщики активных и/или пассивных помех 2 также перемещаются в этом секторе по заданным траекториям и излучают активные помехи заданного уровня и/или создают пассивные помехи заданной плотности (фиг.1).
РЛС 3 при неподвижной антенне с помощью электронного сканирования осуществляет осмотр сектора Ω, обнаружение и измерение координат целей 1 с периодом обзора ТΩ в n раз меньшим, чем период обзора всей зоны обзора Т0.
Вычисление координат обнаруженных целей, захват и сопровождение их траекторий осуществляется в вычислителе 11. При этом вычисление координат обнаруженных целей осуществляется, например, в соответствии с патентом РФ №2325669, а захват и сопровождение - с алгоритмом, описанным в источнике: Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Советское радио, 1974, с.285-287. Измеренные таким образом параметры траекторий целей со второго выхода вычислителя 11 выдаются на выход РЛС.
Измеренные параметры траекторий целей с выхода РЛС запоминаются в регистраторе данных 4. По окончании испытания накопленные в регистраторе 4 данные статистически обрабатываются в блоке обработки данных 5, на выходе которого получают оценки характеристик РЛС.
Таким образом достигается заявляемый технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2013 |
|
RU2548682C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2413239C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ НА БАЗЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С УПРАВЛЯЕМЫМИ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ | 2013 |
|
RU2543511C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2012 |
|
RU2646847C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| СПОСОБ ОЦЕНКИ ХАРАКТЕРИСТИК РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПРИ ДЕЙСТВИИ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2000 |
|
RU2193782C2 |
| Способ радиолокационного обзора пространства (варианты) | 2016 |
|
RU2638557C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2015 |
|
RU2596851C1 |

Изобретение относится к области радиолокации, в частности к области испытаний радиолокационной станции (РЛС) с двумерной фазированной антенной решеткой. Достигаемым техническим результатом является уменьшение количества пусков целей при испытаниях РЛС при сохранении достоверности испытаний. Технический результат в заявляемом способе достигается за счет того, что радиолокационную обстановку создают в секторе зоны обзора Ω размером по азимуту ΔβΩ, не превышающем сектор электронного сканирования по азимуту ΔβΩ≤ΔβЭ, в процессе испытания РЛС сектор Ω осматривают при неподвижной антенне с использованием электронного сканирования группами осмотров по n осмотров в группе, где n=В/ΔβΩ, с периодом каждого осмотра Т0/n, при этом отраженным сигналам, обнаруженным в секторе Ω при k-м его осмотре в группе, где k=1, 2, …, n, присваивают порядковый номер этого осмотра k, причем нумерацию осмотров сектора Ω повторяют в каждой группе осмотров, отраженные сигналы из разных групп осмотров, но с одинаковыми порядковыми номерами k, считают сигналами, отраженными от одной и той же цели при k-м ее залете по заданной траектории. 4 ил.
Способ испытания радиолокационной станции (РЛС) с двумерной фазированной антенной решеткой, предназначенной для обнаружения и сопровождения целей в зоне обзора В по азимуту с периодом обзора Т0, включающий создание натурной целевой и помеховой радиолокационной обстановки с использованием целей и постановщиков помех, пускаемых по заданным траекториям, обнаружение, захват и сопровождение целей, статистическую обработку измеренных параметров траекторий целей, отличающийся тем, что указанную радиолокационную обстановку создают в секторе зоны обзора Ω размером по азимуту ΔβΩ, не превышающим сектор электронного сканирования по азимуту ΔβΩ≤ΔβЭ, в процессе испытания РЛС сектор Ω осматривают при неподвижной антенне с использованием электронного сканирования группами осмотров по n осмотров в группе, где n=В/ΔβΩ, с периодом каждого осмотра Т0/n, при этом отраженным сигналам, обнаруженным в секторе Ω при k-м его осмотре в группе, где k=1, 2, …, n, присваивают порядковый номер этого осмотра k, причем нумерацию осмотров сектора Ω повторяют в каждой группе осмотров, отраженные сигналы из разных групп осмотров, но с одинаковыми порядковыми номерами k, считают сигналами, отраженными от одной и той же цели при k-м ее залете по заданной траектории.
| ЛЕОНОВ А.И | |||
| и др | |||
| Испытания РЛС | |||
| Оценка характеристик | |||
| - М.: Радио и связь, 1990, с.3, 25 | |||
| СПОСОБ ОЦЕНКИ ХАРАКТЕРИСТИК РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПРИ ДЕЙСТВИИ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2000 |
|
RU2193782C2 |
| СПОСОБ ПРОВЕДЕНИЯ НАТУРНО-МОДЕЛЬНЫХ ИСПЫТАНИЙ РАДИОЭЛЕКТРОННЫХ СИСТЕМ | 1997 |
|
RU2137193C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| US 2006220951 A, 05.10.2006 | |||
| WO 2006010662 A1, 02.02.2006 | |||
| US 6633251 B1, 14.10.2003 | |||
| Этажная литьевая форма | 1990 |
|
SU1742084A1 |

