Изобретения относятся к области радиолокации и могут быть использованы для обнаружения траекторий скоростных объектов с помощью радиолокационных станций (РЛС) кругового обзора с антенной, выполненной в виде одномерной фазированной антенной решетки (ФАР) с электронным управлением иглообразным лучом по углу места и механическим вращением по азимуту.
Известен способ обнаружения траектории объекта, включающий обнаружение объекта в процессе регулярного осмотра зоны обзора РЛС, обнаружение объекта в стробах захвата и подтверждение траектории при постоянном периоде регулярного осмотра зоны обзора (Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. «Радио и связь», Москва, 1993, с.26-28).
Под стробом захвата траектории понимается предварительно рассчитанная трехмерная область в пространстве, в которой с известной достаточно высокой вероятностью будет находиться объект, способный двигаться в любом направлении от точки его обнаружения с наибольшей возможной для заданного типа объектов скоростью, через интервал времени, равный периоду обращения к объекту (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., «Сов. радио», 1974, с.199).
Под стробом подтверждения траектории понимается предварительно рассчитанная трехмерная область в пространстве, в которой с известной достаточно высокой вероятностью будет находиться объект, движущийся в направлении и со скоростью, экстраполированными на основе предыдущих данных об объекте, через интервал времени, равный периоду обращения к объекту (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., «Сов. радио», 1974, с.199).
Известна обзорная РЛС с постоянным периодом обращения к объекту, равным периоду осмотра зоны обзора РЛС, содержащая антенну, последовательно соединенные передатчик, антенный переключатель, приемник и оконечное устройство, а также синхронизатор, при этом сигнальный вход/выход антенны соединен со входом/выходом антенного переключателя, а координатный ее выход - со вторым входом оконечного устройства, первый и второй выходы синхронизатора соединены соответственно со входом передатчика и с третьим входом оконечного устройства (Теоретические основы радиолокации, под ред. В.Е.Дулевича, М., «Сов. радио», 1978, с.19, рис.1.5а).
Недостатком известных технических решений является значительное увеличение размеров стробов захвата и подтверждения траектории при обнаружении траектории скоростных и маневрирующих объектов. Увеличение размеров стробов приводит к увеличению затрат временных и энергетических ресурсов, требуемых на осмотр стробов захвата и для подтверждения траектории. В результате происходит перегрузка системы обработки радиолокационной информации, уменьшается пропускная способность РЛС.
Наиболее близкий способ обнаружения траектории объекта в заданном секторе по азимуту по заданному критерию обнаружения траектории объекта с помощью РЛС кругового обзора с антенной, выполненной в виде одномерной фазированной антенной решетки с электронным управлением иглообразным лучом по углу места и механическим вращением по азимуту, включает регулярный осмотр зоны обзора РЛС при заданном направлении вращения антенны и осмотр заданного сектора по азимуту, при этом, если после очередного осмотра заданного сектора по азимуту количество его осмотров оказывается недостаточным для того, чтобы заданный критерий обнаружения траектории объекта мог выполниться, то решение об обнаружении или об отсутствии обнаружения траектории объекта не принимают, если же количество осмотров заданного сектора по азимуту оказывается достаточным для того, чтобы заданный критерий обнаружения траектории объекта мог выполниться, то в зависимости от выполнения указанного критерия принимают решение об обнаружении или об отсутствии обнаружения траектории объекта (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., «Сов. радио», 1974, с.198-200).
Обнаружение траекторий особо важных объектов в РЛС рассматриваемого типа, как правило, осуществляют в пределах заранее заданного сектора по азимуту, границы которого определяют по внешнему целеуказанию от средств разведки, например космической. Кроме того, часто для увеличения размеров указанного сектора по углу места и концентрации излучаемой энергии скорость вращения антенны в пределах заданного сектора уменьшают.
Решение об обнаружении или об отсутствии обнаружения траектории объекта в заданном секторе по азимуту в РЛС рассматриваемого типа, как правило, принимают по критерию 2/2+k/n, в соответствии с которым траекторию объекта считают обнаруженной, если объект обнаружен при регулярном осмотре заданного сектора по азимуту и затем в стробе захвата траектории, осматриваемом при следующем обращении к объекту, а также в k стробах подтверждения траектории, осматриваемых не более чем при n последовательных обращениях к объекту (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., «Сов. радио», 1974, с.279-282).
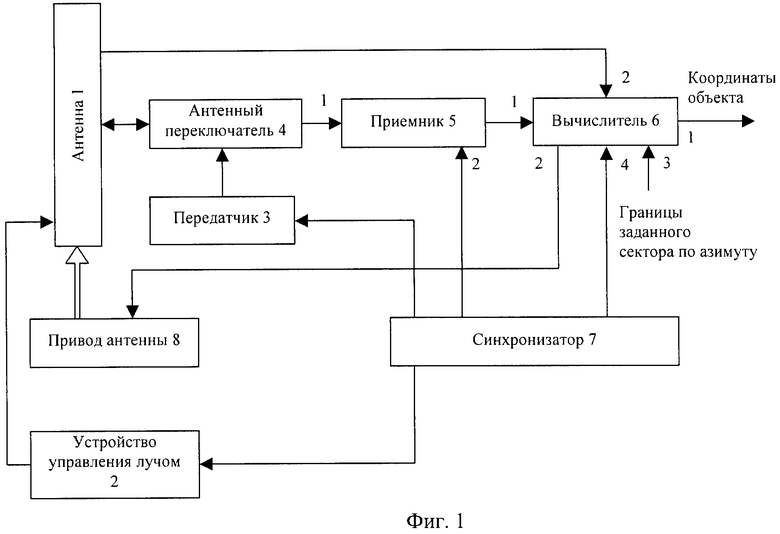
Устройством, наиболее близким к заявляемому, является РЛС кругового обзора, содержащая (фиг.1) антенну 1, устройство управления лучом 2, выход которого соединен с антенной 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, выполняющий операции обнаружения траектории объекта и управления скоростью вращения антенны 1, первый выход которого является выходом РЛС, а также синхронизатор 7 и привод антенны 8, механически соединенный с антенной 1, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, второй выход вычислителя 6, являющиеся выходом сигнала, управляющего скоростью вращения антенны 1, соединен со входом привода антенны 8, на третий вход вычислителя 6 подаются координаты границ заданного сектора по азимуту, четыре выхода синхронизатора 7 соединены соответственно со входом устройства управления лучом 2, входом передатчика 3, вторым входом приемника 5 и с четвертым входом вычислителя 6 (Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию: Пер с англ. - М.: Радио и связь, 1986, с.19).
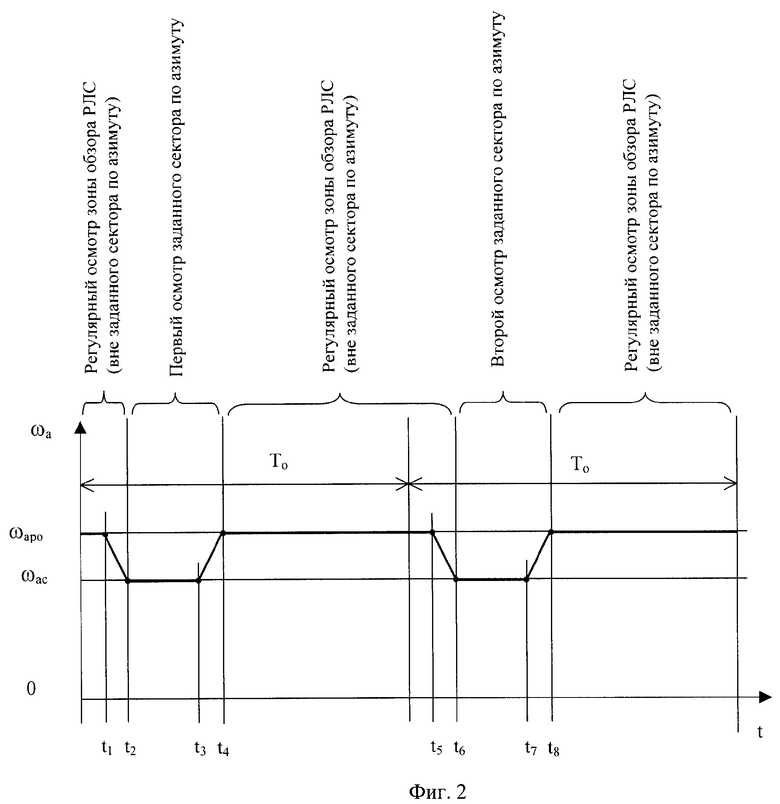
Рассмотрим работу наиболее близкой РЛС при критерии обнаружения траектории вида 2/2 (частный случай критерия 2/2+k/n, когда k=0). Введем следующие обозначения (фиг.2): t - координатная ось текущего времени; ωа - координатная ось скорости вращения антенны; ωас - заданная скорость вращения антенны в заданном секторе по азимуту; ωаро - заданная скорость вращения антенны при регулярном осмотре зоны обзора РЛС (вне заданного сектора по азимуту).
По сигналам устройства управления лучом 2 осуществляется электронное перемещение луча антенны 1 по углу места, а за счет вращения антенны 1 происходит его перемещение по азимуту (Справочник по радиолокации. Под ред. М.Сколника, т.4, - М.: «Сов. радио», 1978, с.72, рис.4). При этом на передатчик 3 по командам синхронизатора 7 поступают импульсы запуска, обеспечивающие излучение зондирующего сигнала в последовательно осматриваемые направления. Период обращения к объекту равен периоду регулярного осмотра зоны обзора То.
Отраженный от объекта сигнал через антенну 1 и антенный переключатель 4 поступает в приемник 5, где преобразуется на промежуточную частоту, фильтруется, усиливается. На второй вход вычислителя 6 с координатного выхода антенны 1 поступают координаты луча антенны, а с выхода приемника 5 - отфильтрованный и усиленный сигнал. В вычислителе 6 сигнал от объекта сравнивается с порогом обнаружения, при превышении которого принимается решение об обнаружении объекта. С синхронизатора 7 на четвертый вход вычислителя 6 подается сигнал, пропорциональный моменту излучения зондирующего сигнала. По величине задержки зондирующего сигнала в вычислителе 6 по известным формулам (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. М., «Сов. Радио», 1970, с.221) определяется дальность до обнаруженного объекта.
Координаты границ заданного сектора по азимуту от внешнего источника целеуказания поступают на третий вход вычислителя 6. Текущая азимутальная координата луча антенны 1 поступает на второй вход вычислителя 6, где сравнивается с азимутальным положением границ заданного сектора по азимуту. Порядок осмотра заданного сектора по азимуту следующий (фиг.2).
При достижении лучом антенны азимутального положения (момент времени t1), предшествующего началу заданного сектора по азимуту и определяемого исходя из скоростей вращения антенны ωаро и ωас, начинается замедление вращения антенны от скорости регулярного осмотра зоны обзора ωаро до заданной скорости вращения антенны в заданном секторе ωас. Для этого со второго выхода вычислителя 6 на вход привода антенны 8 подается сигнал на замедление вращения антенны 1 и производится замедление ее вращения, которое заканчивается в момент t2. В течение регулярного осмотра заданного сектора производятся излучения зондирующих сигналов и поиск сигнала, отраженного от объекта. Если сигнал, отраженный от объекта, обнаружен, то в вычислителе 6 рассчитываются границы строба захвата траектории, в котором будет находиться объект при следующем осмотре заданного сектора на следующем обороте антенны. Если сигнал от объекта в заданном секторе не обнаружен, то границы строба захвата не рассчитываются, поиск сигнала будет продолжен при регулярном осмотре заданного сектора на следующем обороте антенны.
В момент t3, предшествующий окончанию регулярного осмотра заданного сектора, осуществляется ускорение вращения антенны от скорости ωас до скорости регулярного осмотра зоны обзора ωаро, которое заканчивается в момент t4. Далее продолжается регулярный осмотр зоны обзора РЛС (вне заданного сектора).
На следующем обороте антенны в моменты времени t5, t6, t7, t8 производятся действия по замедлению и ускорению антенны, аналогичные действиям, проводимым на предыдущем обороте антенны в моменты времени t1, t2, t3, t4. В заданном секторе по азимуту осуществляется поиск отраженных сигналов в стробах захвата траектории, рассчитанных при регулярном осмотре заданного сектора. Если сигналы в стробах захвата траектории обнаружены, то принимается решение об обнаружении траектории объекта, в противном случае принимается решение об отсутствии ее обнаружения. При обнаружении траектории объекта координаты объекта выдаются с первого выхода вычислителя 6.
Таким образом, в наиболее близких технических решениях каждый осмотр заданного сектора по азимуту осуществляется на отдельном обороте антенны, т.е. через интервалы времени, близкие к периоду регулярного осмотра зоны обзора РЛС То.
Недостатки известных технических решений заключаются в следующем.
К современным обзорным РЛС предъявляются требования обнаружения траекторий объектов, имеющих скорости до 4.5 М и перегрузки до 20 g. В обзорных РЛС рассматриваемого типа период регулярного осмотра зоны обзора практически постоянен. В различных РЛС он находится в пределах 6-12 с и не может быть существенно сокращен, так как определяется скоростью вращения антенны, которая ограничена необходимым временем осмотра зоны обзора РЛС. Скоростные и интенсивно маневрирующие объекты за это время проходят значительные расстояния, а поскольку для проверки всего критерия обнаружения траектории требуется несколько обращений к объекту, то время до обнаружения траектории объекта, а соответственно и расстояние, пройденное объектом за это время, могут оказаться недопустимо большими для того, чтобы своевременно и на достаточной дальности поразить объект.
Кроме того, большие размеры стробов захвата и подтверждения траектории при обнаружении траекторий скоростных и интенсивно маневрирующих объектов требуют значительных затрат временных и энергетических ресурсов РЛС для их осмотра, а в связи с тем, что указанные ресурсы в РЛС рассматриваемого типа весьма ограничены, происходит перегрузка системы обработки радиолокационной информации, в результате чего существенно уменьшается пропускная способность РЛС.
Решаемой задачей (техническим результатом), таким образом, является сокращение времени обнаружения траектории скоростных и интенсивно маневрирующих объектов в заданном секторе по азимуту и увеличение пропускной способности РЛС кругового обзора с антенной, выполненной в виде одномерной ФАР с электронным управлением иглообразным лучом по углу места и механическим вращением по азимуту.
Указанный результат достигается тем, что в способе обнаружения траектории объекта в заданном секторе по азимуту по заданному критерию обнаружения траектории объекта с РЛС кругового обзора с антенной, выполненной в виде одномерной ФАР с электронным управлением иглообразным лучом по углу места и механическим вращением по азимуту, включающем регулярный осмотр зоны обзора РЛС при заданном направлении вращения антенны и осмотр заданного сектора по азимуту, при этом, если после очередного осмотра заданного сектора по азимуту количество его осмотров оказывается недостаточным для того, чтобы заданный критерий обнаружения траектории объекта мог выполниться, то решение об обнаружении или об отсутствии обнаружения траектории объекта не принимают, если же количество осмотров заданного сектора по азимуту оказывается достаточным для того, чтобы заданный критерий обнаружения траектории объекта мог выполниться, то в зависимости от выполнения указанного критерия принимают решение об обнаружении или об отсутствии обнаружения траектории объекта, согласно изобретению после каждого осмотра заданного сектора по азимуту, при котором решение об обнаружении или об отсутствии обнаружения траектории объекта не принято, изменяют направление вращения антенны и осуществляют следующий осмотр заданного сектора по азимуту, а после осмотра заданного сектора по азимуту, при котором решение об обнаружении или об отсутствии обнаружения траектории объекта принято, направление вращения антенны устанавливают совпадающим с заданным для регулярного осмотра зоны обзора РЛС и продолжают регулярный осмотр зоны обзора РЛС.
Указанный результат достигается также тем, что в РЛС кругового обзора, содержащей антенну, выполненную в виде одномерной ФАР с электронным управлением лучом по углу места и механическим вращением по азимуту, устройство управления лучом, выход которого соединен с управляющим входом антенны, последовательно соединенные передатчик, антенный переключатель, приемник и вычислитель, выполняющий операции обнаружения траектории объекта и управления скоростью вращения антенны, выход которого является выходом РЛС, а также синхронизатор и механически соединенный с антенной привод антенны, при этом сигнальный вход/выход антенны соединен со входом/выходом антенного переключателя, а координатный ее выход - со вторым входом вычислителя, второй выход вычислителя, являющийся выходом сигнала, управляющего скоростью вращения антенны, соединен с первым входом привода антенны, на третий вход вычислителя подаются координаты границ заданного сектора по азимуту, четыре выхода синхронизатора соединены соответственно со входом устройства управления лучом, входом передатчика, вторым входом приемника и с четвертым входом вычислителя, согласно изобретению введены третий выход вычислителя, являющийся выходом сигнала, управляющего направлением вращения антенны, и соединенный с ним второй вход привода антенны.
Суть заявляемых технических решений заключается в следующем.
Сокращение времени обнаружения траектории скоростных и интенсивно маневрирующих объектов в пределах заданного сектора по азимуту в заявляемых технических решениях осуществляют следующим образом. Если на текущем осмотре заданного сектора оказывается, что критерий обнаружения траектории потенциально может выполниться, но на данном осмотре принять решение об этом невозможно, поскольку количество обращений к объекту еще недостаточно (количество обращений к объекту менее длины критерия), то следующий его осмотр осуществляют сразу же после окончания текущего осмотра. Такая возможность осмотра заданного сектора реализуется за счет изменения направления вращения антенны после каждого осмотра заданного сектора, кроме осмотра (последнего), при котором было принято решение об обнаружении или об отсутствии обнаружения траектории объекта. Необходимость изменения направления вращения антенны после последнего осмотра зависит от направления ее вращения при указанном осмотре. Если при этом осмотре направление вращения антенны не совпадает с заданным для регулярного осмотра зоны обзора РЛС, то его изменяют, в противном случае не изменяют.
Критерием обнаружения траектории объекта в РЛС рассматриваемого типа, как правило, является критерий вида 2/2+k/n (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., «Сов. радио», 1974, с.279-282). Первая часть критерия (2/2) означает, что для обнаружения траектории объекта необходимо, чтобы объект был обнаружен один раз - при регулярном осмотре заданного сектора по азимуту и еще один раз - в стробе захвата траектории при следующем осмотре заданного сектора по азимуту, вторая часть критерия (k/n) означает, что для обнаружения траектории объекта необходимо также, чтобы объект был обнаружен в k стробах подтверждения траектории не более чем при n последовательных осмотрах заданного сектора. Часто k выбирают равным 0 или 1.
В качестве примера приведем порядок осмотра заданного сектора по азимуту в соответствии с заявляемым способом при обнаружении траектории объекта по критерию 2/2, который является частным случаем критерия 2/2+k/n, при k=0. Этот критерий считается наилучшим для обнаружения траекторий наиболее скоростных и маневрирующих объектов. Рассмотрение проведем с помощью фиг.3. Как и на фиг.2, используем обозначения: t - координатная ось текущего времени; ωа - координатная ось скорости вращения антенны; ωас - заданная скорость вращения антенны в заданном секторе по азимуту; ωаро - заданная скорость вращения антенны при регулярном осмотре зоны обзора (вне заданного сектора по азимуту).
Первый (регулярный) осмотр заданного сектора по азимуту осуществляется при направлении вращения антенны, совпадающем с направлением ее вращения при регулярном осмотре зоны обзора (осмотр в прямом направлении), и начинается в момент t2. Перед этим в момент времени t1 (определяемый исходя из скоростей вращения антенны ωаро и ωас) производится замедление вращения антенны от скорости регулярного осмотра зоны обзора РЛС ωаро до заданной скорости вращения антенны в заданном секторе ωас, которое заканчивается в момент t2. Если сигнал от объекта при регулярном осмотре заданного сектора не обнаружен, то границы строба захвата не рассчитываются, поиск сигнала будет продолжен при регулярном осмотре заданного сектора на следующем обороте антенны.
Если при регулярном осмотре заданного сектора объект обнаружен, то в момент, предшествующий окончанию регулярного осмотра сектора (в момент t3), начинается замедление вращения антенны, которое заканчивается ее остановкой (в момент t4). После этого начинается второй осмотр заданного сектора, который производится при противоположном направлении вращения антенны (осмотр в направлении, противоположном направлению предыдущего осмотра). Скорость вращения антенны увеличивается до заданной -ωас (в момент t5). В течение второго осмотра заданного сектора осматривается строб захвата траектории объекта. Если в стробе захвата объект обнаружен, то принимается решение об обнаружении траектории объекта, в противном случае - об отсутствии ее обнаружения.
В момент, предшествующий окончанию второго осмотра (в момент t6), начинается замедление вращения антенны, которое заканчивается ее остановкой (в момент t7). После чего осуществляются изменение направления вращения антенны и переход к направлению и скорости вращения антенны, совпадающим с заданным для регулярного осмотра зоны обзора РЛС. Скорость вращения антенны увеличивается до заданной для регулярного осмотра зоны обзора РЛС ωаро (в момент t8).
Далее продолжается регулярный осмотр зоны обзора РЛС с заданными для него направлением и скоростью вращения антенны.
Отметим, скорость вращения антенны при регулярном осмотре зоны обзора ωаро и скорость ωас, при которой осматривается заданный сектор по азимуту, могут совпадать. В этом случае соответствующие замедление и ускорение вращения антенны не производятся.
В заявляемых технических решениях средний интервал времени между последовательными обращениями к объекту, находящемуся в заданном секторе по азимуту, приблизительно равен времени однократного осмотра указанного сектора (с учетом замедления скорости вращения в секторе), т.е. Тз=t4-t2≈t7-t4. Поскольку величина задаваемого сектора относительно невелика - обычно она не превышает Δβ=60° по азимуту, то соответственно невелик и интервал времени между обращениями к объекту. Так, в частном случае для конкретных числовых значений времени замедления tзам=t2-t1≈t5-t3≈t8-t6=0.5 с, при равенстве времен осмотров сектора tсект=t3-t2≈t6-t5 и уменьшении скорости вращения антенны в пределах заданного сектора в два раза относительно скорости регулярного осмотра зоны обзора (ωаро/ωас=2) средний интервал времени между обращениями к объекту в заданном секторе (Тз) определяется следующими выражениями:


При То=12 с и ωаро=60°/с из выражения (1) следует, что средний интервал времени между последовательными обращениями к объекту Тз≈2,5 с, т.е. в≈4.8 раз меньше, чем в наиболее близких технических решениях. Такое уменьшение времени между последовательными обращениями к объекту приводит к такому же (в среднем) сокращению времени обнаружения его траектории. Значительно уменьшаются размеры стробов захвата и подтверждения траектории, что приводит к увеличению пропускной способности РЛС.
Таким образом достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - блок-схема наиболее близкой РЛС.
Фиг.2 - порядок осмотра заданного сектора по азимуту в процессе обнаружения траектории объекта в наиболее близких технических решениях по критерию 2/2; обозначено: t - координатная ось текущего времени; ωа - координатная ось скорости вращения антенны; ωаз - заданная скорость вращения антенны в заданном секторе по азимуту; ωаро - заданная скорость вращения антенны при регулярном осмотре зоны обзора (вне заданного сектора); То - период регулярного осмотра зоны обзора РЛС; зависимость изменения скорости вращения антенны от времени для упрощения чертежа показана кусочно-линейной, поскольку для описания сущности изобретения это не имеет принципиального значения; указанный порядок осмотра осуществляется в течение двух оборотов антенны.
Фиг.3 - порядок осмотра заданного сектора по азимуту в процессе обнаружения траектории объекта по критерию 2/2 в заявляемых технических решениях; как и на фиг.2, зависимость изменения скорости вращения антенны от времени для упрощения чертежа показана кусочно-линейной; указанный порядок осмотра осуществляется в течение одного оборота антенны.
Фиг.4 - блок-схема заявляемой РЛС.
Фиг.5 - блок-схема привода антенны 8.
Заявляемая РЛС (фиг.4) содержит антенну 1, устройство управления лучом 2, выход которого соединен с антенной 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, выполняющий операции обнаружения траектории объекта и управления скоростью и направлением вращения антенны 1, первый выход которого является выходом РЛС, а также синхронизатор 7 и привод антенны 8, механически соединенный с антенной 1, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, второй и третий выходы вычислителя 6, являющиеся соответственно выходом сигнала, пропорционального величине скорости вращения антенны 1, и выходом сигнала направления вращения антенны 1, соединены соответственно с первым и со вторым входами привода антенны 8, на третий вход вычислителя 6 подаются координаты границ заданного сектора по азимуту, четыре выхода синхронизатора 7 соединены соответственно со входом устройства управления лучом 2, входом передатчика 3, вторым входом приемника 5 и с четвертым входом вычислителя 6.
Привод антенны 8 состоит из силовой передачи 9, двигателя 10 и системы управления 11, при этом вал двигателя 10 механически соединен со входом силовой передачи 9, которая механически соединена с антенной 1, а электрический вход двигателя 10 соединен с выходом системы управления 11, первый и второй входы которой являются соответственно входом сигнала, управляющего скоростью вращения антенны, и входом сигнала, управляющего направлением вращения антенны.
Заявляемое устройство может быть выполнено с использованием следующих функциональных элементов.
Антенна 1 - ФАР с одномерным электронным сканированием по углу места и механическим вращением по азимуту (Справочник по радиолокации. Под ред. М.Сколника, т.2, - М.: «Сов. радио», 1977, с.138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении по углу места (Справочник по радиолокации. Под ред. М.Сколника, т.2, - М.: «Сов. радио», 1977, с.141-143).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.166-168).
Передатчик 3 (фиг.3) - многокаскадный импульсный передатчик на клистроне, выполнен на основе известного передатчика (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.278-279, рис.7.2).
Приемник 5 (фиг.4) - супергетеродинный приемник, выполнен на основе известного приемника (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.343-344, рис.8.1).
Вычислитель 6 - цифровой вычислитель. В вычислителе 6 реализуется известный алгоритм обнаружения траектории объекта (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., «Сов. радио», 1974, с.285-287).
Синхронизатор 7 (фиг.5) выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова, с.602-603).
Привод антенны 8 - привод (Российский энциклопедический словарь, кн.2, М., «Большая Российская Энциклопедия», 2000, с.1248).
Двигатель 9 - машина постоянного тока (Брускин Д.Э., Зорохович А.Е., Хвостов B.C. Электрические машины, ч.2, М., «Высшая школа», 1987, с.195-203).
Силовая передача 10 - редуктор (Типугин В.Н., Вейцель В.А. Радиоуправление, М., «Сов. радио», 1962, с.578).
Система управления 11 - блок управления скоростью и направлением вращения вала двигателя. Методы управления скоростью и направлением вращения вала двигателя описаны в источнике: Брускин Д.Э., Зорохович А.Е., Хвостов B.C. Электрические машины, ч.2, М., «Высшая школа», 1987, с.281-287.
Рассмотрим работу заявляемой РЛС (фиг.4) при критерии обнаружения траектории объекта вида 2/2.
В процессе регулярного осмотра зоны обзора РЛС по сигналам устройства управления лучом 2 осуществляется электронное перемещение луча антенны 1 по углу места, а за счет вращения антенны 1 происходит его перемещение по азимуту. При этом на передатчик 3 по командам синхронизатора 7 поступают импульсы запуска, обеспечивающие излучение зондирующего сигнала в последовательно осматриваемые направления зоны регулярного обзора РЛС.
Отраженный от объекта сигнал через антенну 1 и антенный переключатель 4 поступает в приемник 5, где преобразуется на промежуточную частоту, фильтруется, усиливается. На второй вход вычислителя 6 с координатного выхода антенны 1 поступают координаты луча антенны, а с выхода приемника 5 - отфильтрованный и усиленный сигнал. В вычислителе 6 сигнал от объекта сравнивается с порогом обнаружения, при превышении которого принимается решение об обнаружении объекта. С синхронизатора 7 сигнал на четвертый вход вычислителя 6 подается в момент излучения зондирующего сигнала. По величине задержки зондирующего сигнала в вычислителе 6 по известным формулам (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. М., «Сов. Радио», 1970, с.221) определяется дальность до обнаруженного объекта.
Координаты заданного сектора по азимуту от внешнего источника целеуказания поступают на третий вход вычислителя 6. Текущая азимутальная координата луча антенны 1 поступает на второй вход вычислителя 6, где сравнивается с азимутальным положением границ заданного сектора по азимуту. По достижении азимутальным положением луча антенны заданного сектора по азимуту реализуется следующий порядок его осмотра (фиг.3).
Первый (регулярный) осмотр заданного сектора по азимуту осуществляется при направлении вращения антенны, совпадающем с направлением ее вращения при регулярном осмотре зоны обзора РЛС (осмотр в прямом направлении). При достижении лучом антенны азимутального положения, предшествующего началу заданного сектора по азимуту (в момент времени t1, определяемый исходя из скоростей вращения антенны ωаро и ωас), начинается замедление вращения антенны от скорости регулярного осмотра зоны обзора РЛС ωаро до заданной скорости ее вращения в заданном секторе по азимуту ωас. Для этого со второго выхода вычислителя 6 на вход привода антенны 8 подается сигнал на замедление вращения антенны 1, которое заканчивается в момент t2. С этого момента начинается регулярный осмотр заданного сектора по азимуту. Перед завершением регулярного осмотра указанного сектора со второго выхода вычислителя 6 на вход привода антенны 8 выдается сигнал на остановку антенны 1, и в момент t3 начинается замедление вращения антенны, которое заканчивается ее остановкой в момент t4. В течение регулярного осмотра в заданном секторе производятся излучения зондирующих сигналов и поиск сигнала, отраженного от объекта. Если сигнал, отраженный от объекта, обнаружен, то в вычислителе 6 рассчитываются границы строба захвата траектории, в котором будет находиться объект при следующем осмотре заданного сектора в течение обратного вращения антенны (если же сигнал от объекта при регулярном осмотре заданного сектора не обнаружен, то границы строба захвата не рассчитываются и направление вращения антенны не изменяется, поиск сигнала в заданном секторе по азимуту будет продолжен при регулярном осмотре заданного сектора на следующем обороте антенны).
Далее в момент t4 с третьего выхода вычислителя 6 на вход привода антенны 8 выдается сигнал на изменение направления вращения антенны и начинается второй осмотр заданного сектора, при котором направление вращения антенны противоположно направлению ее вращения при регулярном осмотре зоны обзора РЛС. При этом осмотр заданного сектора происходит при перемещении луча по азимуту в направлении, противоположном его перемещению при предыдущем осмотре. По окончании ускорения (в момент t5) осмотр заданного сектора осуществляется с заданной скоростью вращения -ωас. В течение второго осмотра сектора осуществляются излучения зондирующих сигналов, и производится поиск отраженных сигналов в стробах захвата траектории, рассчитанных при регулярном (первом) осмотре сектора. При обнаружении сигналов в стробах захвата траектории принимается решение об обнаружении траектории объекта, в противном случае принимается решение об отсутствии обнаружения траектории. При обнаружении траектории объекта координаты объекта выдаются с первого выхода вычислителя 6.
В момент времени t6, предшествующий окончанию второго осмотра заданного сектора по азимуту, по командам, выдаваемым со второго выхода вычислителя 6, начинается замедление вращения антенны, которое заканчивается ее остановкой (в момент t7). Далее производится переход к регулярному осмотру зоны обзора РЛС, для чего по командам с третьего выхода вычислителя 6 осуществляется изменение направления вращения антенны и производится ее ускорение. После ускорения, которое заканчивается в момент t8, регулярный осмотр зоны обзора РЛС осуществляется с заданными направлением и скоростью ωаро.
Таким образом, заявляемое устройство обеспечивает достижение заявляемого технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2413239C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2013 |
|
RU2548682C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2304789C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА, ОТДЕЛИВШЕГОСЯ ОТ ОБЪЕКТА-НОСИТЕЛЯ | 2007 |
|
RU2345383C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2012 |
|
RU2530547C2 |
| СПОСОБ ОСМОТРА ЗОНЫ ОБЗОРА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2345380C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА В ПРОЦЕССЕ ЗАХВАТА И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ В СТРОБАХ | 2006 |
|
RU2306580C1 |
| Способ радиолокационного обзора | 2016 |
|
RU2626407C1 |


Изобретения относятся к области радиолокации и могут быть использованы для обнаружения траекторий скоростных объектов с помощью радиолокационных станций (РЛС) кругового обзора. Достигаемым техническим результатом является сокращение времени обнаружения траектории скоростных и интенсивно маневрирующих объектов в заданном секторе по азимуту и увеличение пропускной способности РЛС кругового обзора. Технический результат достигается за счет того, что каждый осмотр заданного сектора по азимуту осуществляют сразу же после окончания предыдущего его осмотра, для чего после каждого осмотра заданного сектора по азимуту, при котором решение об обнаружении или об отсутствии обнаружения траектории объекта не принято, изменяют направление вращения антенны и осуществляют следующий осмотр заданного сектора по азимуту, а после осмотра заданного сектора по азимуту, при котором решение об обнаружении или об отсутствии обнаружения траектории объекта принято, направление вращения антенны устанавливают совпадающим с заданным для регулярного осмотра зоны обзора РЛС и продолжают регулярный осмотр зоны обзора РЛС. 2 н.п. ф-лы, 5 ил.
| КУЗЬМИН С.З | |||
| Основы теории цифровой обработки радиолокационной информации | |||
| - М.: Советское радио, 1974, с.198-200 | |||
| МОНЗИНГО Р.А | |||
| и др | |||
| Адаптивные антенные решетки | |||
| Введение в теорию | |||
| - М: Радио и связь, 1986, с.19 | |||
| RU 94038997 A1, 27.08.1996 | |||
| RU 2005107516 A, 27.08.2006 | |||
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ОПОЗНАВАНИЯ ЦЕЛЕЙ | 1984 |
|
RU2121700C1 |
| US 6147638 А, 14.11.2000 | |||
| US 5422829 А, 06.06.1995 | |||
| DE 102005003194 А1, 27.06.2006. | |||

