Изобретение относится к области радиолокации и может быть использовано при радиолокационном обзоре заданной зоны с помощью мобильной радиолокационной станции (РЛС) кругового обзора с антенной в виде одномерной фазированной антенной решетки (ФАР) с электронным управлением лучом по углу места и механическим вращением по азимуту.
Известен способ радиолокационного обзора заданной зоны с помощью РЛС кругового обзора (Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. - М.: Радио и связь, 1993, с. 26-28).
К зоне обзора и периоду ее осмотра предъявляются противоречивые требования - для обнаружения целей и сопровождения их траектории в широком диапазоне высот и дальностей зона обзора она должна иметь достаточно большие размеры по углу места и по дальности, для сопровождения траекторий целей с высокой точностью период осмотра зоны обзора должен быть достаточно мал. В связи с этим выбор указанных параметров всегда является результатом компромисса, который приводит к определенным ухудшения тактико-технических характеристик РЛС. Это является недостатком известного способа.
Наиболее близкий способ радиолокационного обзора с помощью мобильной РЛС кругового обзора с антенной в виде одномерной ФАР с электронным управлением лучом по углу места и механическим вращением по азимуту включает осмотр на каждом периоде обзора одной из двух частей зоны обзора, на которые в координатах дальность - угол места делят заданную зону обзора, обнаружение целей и сопровождение траекторий целей (патент РФ №2345380).
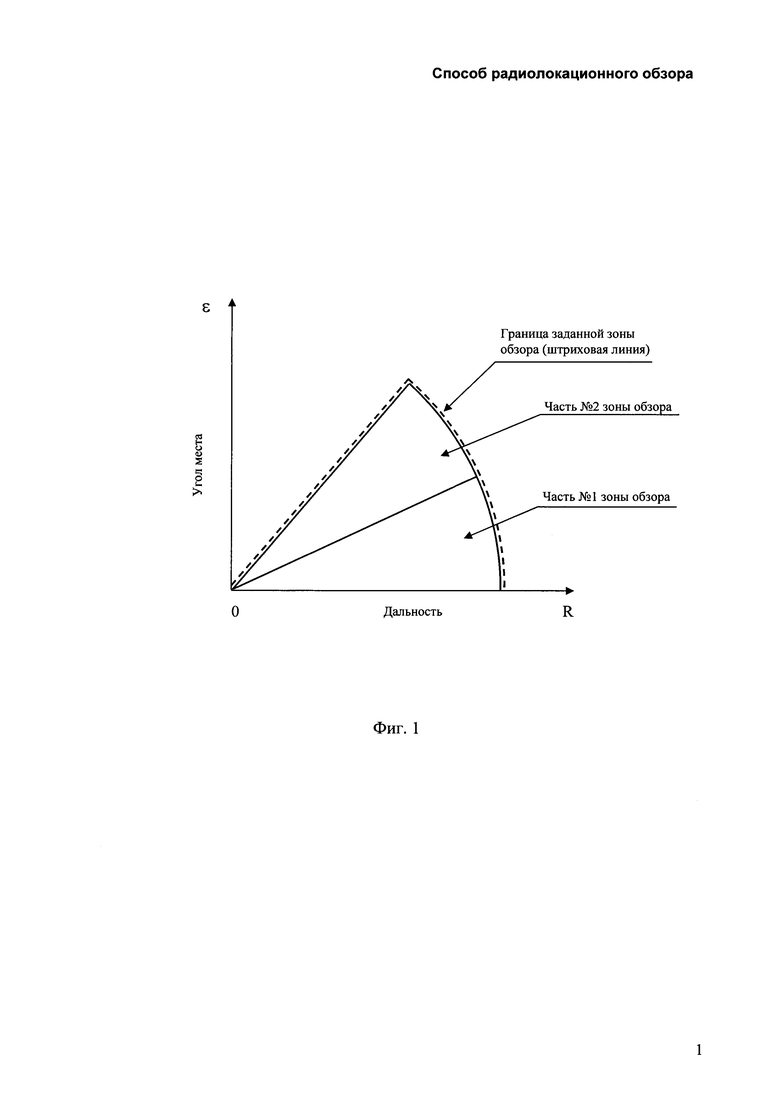
Наиболее близкий способ основан на двухвитковом обзоре, при котором зону обзора в координатах дальность - угол места делят на две части (фиг. 1, части №1 и №2), поочередно осматриваемые на двух последовательных оборотах (витках) антенны. Вся заданная зона осматривается за период обзора (два оборота антенны).
В наиболее близком способе на каждом периоде обзора регулярно осматривается одна и та же зона. В области зоны обзора с большими углами места цели появляются относительно редко, поэтому затраты временных и энергетических ресурсов на обнаружение целей и сопровождение их траекторий в этих областях часто оказываются излишними. Это является недостатком известного способа.
Решаемой задачей (техническим результатом), таким образом, является уменьшение затрат временных и энергетических ресурсов на осмотр области зоны обзора с большими углами места при сохранении обнаружения целей и сопровождения их траекторий в этой области.
Указанный результат достигается тем, что в способе радиолокационного обзора с помощью мобильной радиолокационной станции кругового обзора с антенной в виде одномерной фазированной антенной решетки с электронным управлением лучом по углу места и механическим вращением по азимуту, включающем осмотр на каждом периоде обзора одной из двух частей зоны обзора, на которые в координатах дальность - угол места делят заданную зону обзора, обнаружение целей и сопровождение траекторий целей, согласно изобретению заданную зону обзора по азимуту заранее делят на азимутальные сектора с постоянными границами, в каждом из которых независимо от других секторов осуществляют упомянутый осмотр одной из двух частей зоны обзора, указанные части зоны обзора заранее рассчитывают частично перекрывающимися в плоскости дальность - угол места, для чего нижние границы по углу места обеих частей зоны устанавливают совпадающими с нижней границей по углу места заданной зоны обзора, верхнюю границу по углу места части зоны обзора с большим углом места устанавливают совпадающей с верхней границей по углу места заданной зоны обзора, в каждом азимутальном секторе текущего периода обзора осуществляют выбор части зоны обзора для осмотра этого азимутального сектора на следующем периоде обзора в зависимости от положения сопровождаемых траекторий целей следующим образом:
- если при осмотре части зоны обзора с меньшим углом места в азимутальном секторе текущего периода обзора координаты хотя бы одной сопровождаемой траектории цели, экстраполированные на следующий период обзора, попадают в неперекрывающуюся по углу места область части зоны с большим углом места, то в этом азимутальном секторе на следующем периоде обзора переходят к осмотру части зоны обзора с большим углом места,
- если при осмотре части зоны обзора с большим углом места в азимутальном секторе текущего периода обзора нет ни одной обнаруженной цели или сопровождаемой траектории цели, координаты которой, экстраполированные на следующий период обзора, попадают в неперекрывающуюся по углу места область этой зоны, то в этом азимутальном секторе на следующем периоде обзора переходят к осмотру части зоны обзора с меньшим углом места.
Суть заявляемого способа заключается в следующем.
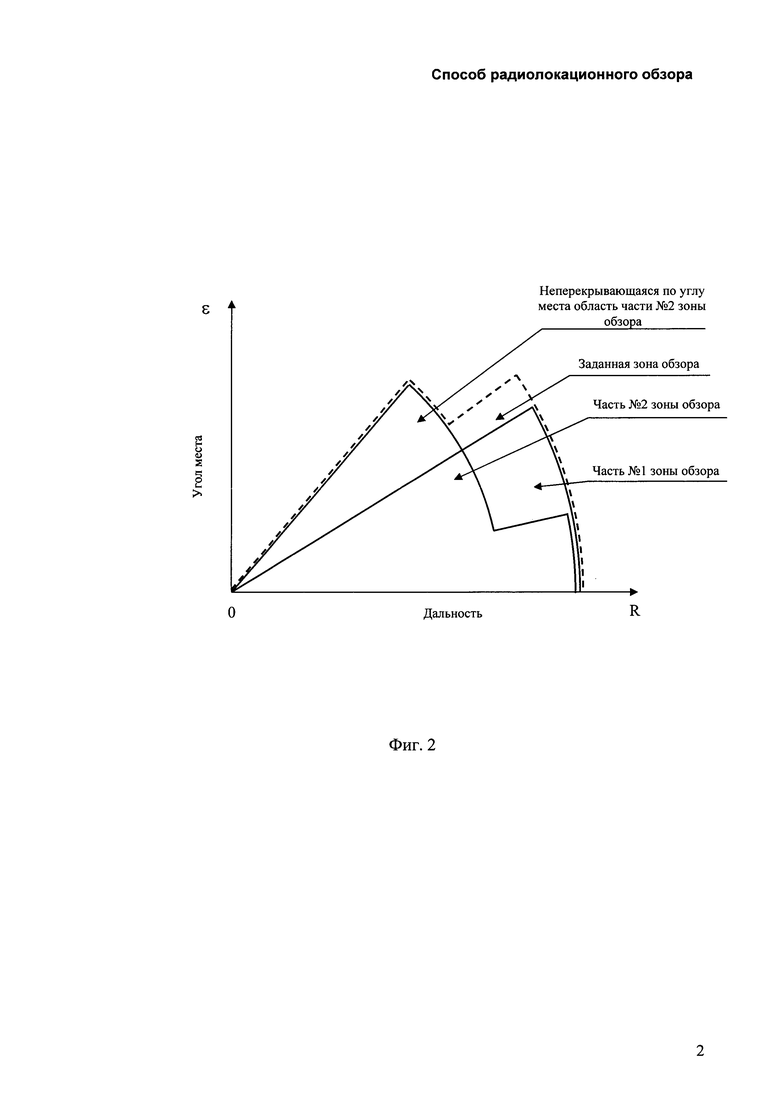
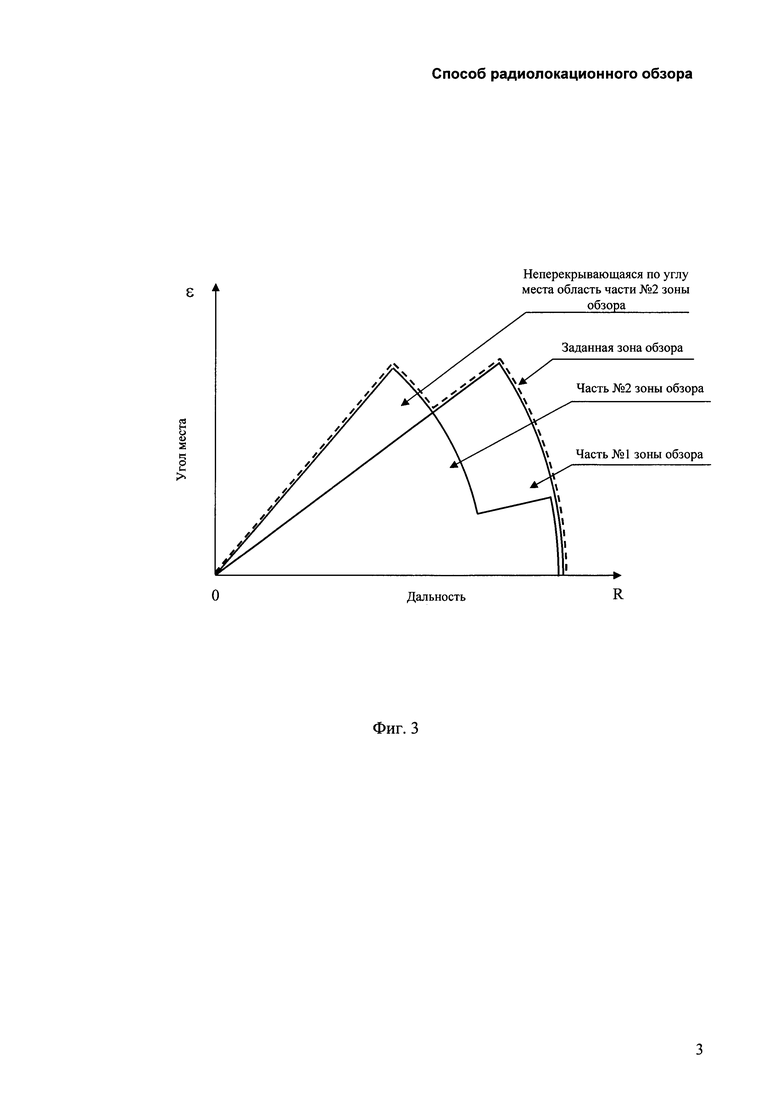
В заявляемом способе при осмотре заданной зоны обзора используется одна из двух заранее рассчитанных частей зоны обзора, отличающихся размерами по углу места и дальности (фиг. 2 - фиг. 4). Одна часть зоны обзора (обозначим ее часть №1) имеет меньший размер по углу места, а по дальности - полностью или частично (обычно в нижних положениях луча) обеспечивает заданную зону. Другая часть зоны обзора (обозначим ее часть №2) обеспечивает заданную зону по углу места, но имеет меньшую (обычно в верхних положениях луча) дальность. Нижние границы по углу места обеих указанных частей зоны совпадают с нижней границей по углу места заданной зоны обзора.
Всю заданную зону обзора по азимуту делят на азимутальные сектора. Границы азимутальных секторов задают постоянными. Азимутальных секторов может быть установлено, например, 12 (по 30° каждый). Осматриваемую часть зоны обзора в каждом азимутальном секторе выбирают независимо от других азимутальных секторов и таким образом обеспечивают гибкость в выборе параметров зоны обзора в изменяющейся по пространству радиолокационной обстановке.
В процессе работы РЛС в каждом азимутальном секторе на текущем периоде обзора выбирают одну из двух указанных частей зоны обзора для осмотра этого сектора на следующем периоде обзора. Выбор осуществляют в зависимости от положения сопровождаемых траекторий целей следующим образом:
- если при осмотре части зоны обзора с меньшим углом места (части №1 зоны обзора) в азимутальном секторе на текущем обзоре координаты хотя бы одной сопровождаемой траектории цели, экстраполированные на следующий обзор, попадают в неперекрывающуюся по углу места область части зоны с бóльшим углом места (область части №2), то в этом азимутальном секторе на следующем обзоре переходят к осмотру части зоны обзора с большим углом места (части №2),
- если при осмотре части зоны обзора с большим углом места (части №2 зоны обзора) в азимутальном секторе на текущем обзоре нет ни одной обнаруженной цели или сопровождаемой траектории цели, координаты которой, экстраполированные на следующий обзор, попадают в неперекрывающуюся по углу места область этой зоны (область части №2), то в этом азимутальном секторе на следующем обзоре переходят к осмотру части зоны обзора с меньшим углом места (части №1).
Выбор между двумя указанными частями зоны обзора в зависимости от наличия сопровождаемых целей в неперекрывающейся по углу места области части №2 зоны обзора позволяет более рационально использовать временные и энергетические ресурсы РЛС. Так, поскольку в неперекрывающейся по углу места области части №2 зоны обзора цели появляются относительно редко, то при осмотре зоны обзора чаще всего применяется часть №1, обеспечивающая большую дальность обнаружения целей и сопровождения их траекторий при меньших углах места. Таким образом, в заявляемом техническом решении за счет изменения конфигурации зоны обзора в зависимости от положения сопровождаемых траекторий целей достигается уменьшение временных и энергетических затрат на осмотр области зоны обзора с большими углами места при сохранении обнаружения целей и сопровождения их траекторий в этой области, то есть достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг. 1 - зона обзора и ее части в наиболее близком способе.
Фиг. 2 - 4 - примеры зон обзора и их частей.
Фиг. 5 - блок-схема РЛС, реализующей заявляемый способ.
РЛС, реализующая заявляемый способ (фиг. 5), содержит антенну 1, устройство управления лучом 2, выход которого соединен с управляющим входом антенны 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, выполняющий операции сопровождения траекторий целей, выбор части зоны обзора, вычисления параметров траекторий целей, первый выход которого является выходом РЛС, а также синхронизатор 7, при этом сигнальный вход/выход антенны 1 соединен с входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, второй и четвертый выходы вычислителя 6 соединены соответственно с первым входом устройства управления лучом 2 и вторым входом передатчика 3, выходы с первого по четвертый синхронизаторов 7 соединены соответственно со вторым входом устройства управления лучом 2, первым входом передатчика 3, вторым входом приемника 5 и с третьим входом вычислителя 6.
РЛС может быть выполнена с использованием следующих функциональных элементов.
Антенна 1 - одномерная ФАР с электронным управлением лучом по углу места и механическим вращением по азимуту (Справочник по радиолокации. Под ред. М. Сколника, т. 2. - М.: Сов. радио, 1977, с. 138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении по углу места (Справочник по радиолокации. Под ред. М. Сколника, т. 2. - М.: Сов. радио, 1977, с. 141-143).
Передатчик 3 - многокаскадный импульсный передатчик на клистроне (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. - М.: Военное издательство МО, 1967, с. 278-279, рис. 7.2).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. - М.: Военное издательство МО, 1967, с. 166-168).
Приемник 5 - супергетеродинный приемник (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. - М.: Военное издательство МО, 1967, с. 343-344, рис. 8.1).
Вычислитель 6 - цифровой вычислитель. Реализуются операции известного алгоритма сопровождения траектории цели (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Сов. радио, 1974, с. 285-287). На основании анализа сопровождаемых траекторий целей в каждом азимутальном секторе осуществляется выбор части зоны обзора для осмотра на следующем обзоре.
Синхронизатор 7 выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. - М.: Сов. радио, 1970, с. 602-603).
Рассмотрим работу РЛС, реализующей заявляемый способ (фиг. 5).
При включении РЛС осмотр зоны обзора может начинаться с любой ее части. Пусть он начинается, например, с части №1 (фиг. 2 - фиг. 4). Перемещение луча РЛС при этом осуществляется в соответствие с программой, записанной в памяти вычислителя 6. Программой определяются параметры обзора, включающие размеры части зоны обзора, ширину луча по азимуту и углу места, шаг перемещения луча. Соответствующие команды со второго выхода вычислителя 6 поступают на первый вход устройства управления лучом 2. По сигналам этого устройства осуществляется электронное перемещение луча антенны 1 по углу места в пределах назначенной части зоны обзора. Тип излучаемого зондирующего сигнала задается командой, поступающей на второй вход передатчика 3 с четвертого выхода вычислителя 6.
На первый вход передатчика 3 со второго выхода синхронизатора 7 поступают импульсы запуска, обеспечивающие излучение зондирующих сигналов в заданные моменты времени обзора зоны.
Синхронизатор 7 обеспечивает согласованную работу всех устройств путем выдачи соответствующих синхроимпульсов.
Отраженный от цели сигнал, принятый с помощью антенны 1, через антенный переключатель 4 поступает в приемник 5, где преобразуется на промежуточную частоту, фильтруется, усиливается и подается на первый вход вычислителя 6. На второй вход вычислителя 6 с координатного выхода антенны 1 поступают координаты луча антенны. В вычислителе 6 принятый сигнал сравнивается с порогом обнаружения, при превышении которого принимается решение об обнаружении цели. Одновременно с излучением зондирующего сигнала с четвертого выхода синхронизатора 7 на третий вход вычислителя 6 подается сигнал, от которого отсчитывается величина задержки зондирующего сигнала, отраженного от цели, и по известным формулам (Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. - М.: Сов. Радио, 1970, с. 221) определяется дальность до цели.
Параметры траекторий сопровождаемых целей определяются в вычислителе 6 в соответствие с известными алгоритмами (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Сов. радио, 1974, с. 285-287). Параметры траекторий целей с первого выхода вычислителя 6 выдаются потребителю радиолокационной информации.
В каждом азимутальном секторе на каждом обзоре осуществляется экстраполяция параметров траектории (там же, с. 229-236).
Если в процессе осмотра части №1 зоны обзора в азимутальном секторе на текущем обзоре координаты хотя бы одной сопровождаемой траектории цели, экстраполированные на следующий обзор, попадают в неперекрывающуюся по углу места область части №2 зоны, то формируется признак, по которому на следующем обзоре в этом азимутальном секторе переходят к осмотру части №2 зоны обзора.
Если в процессе осмотра части №2 зоны обзора в азимутальном секторе на текущем обзоре нет ни одной обнаруженной цели или сопровождаемой траектории цели, координаты которой, экстраполированные на следующий обзор, попадают в неперекрывающуюся по углу места область этой зоны, то формируется признак, по которому в этом азимутальном секторе на следующем обзоре переходят к осмотру части №1 зоны обзора.
Таким образом, в РЛС, реализующей заявляемый способ, достигается уменьшение затрат временных и энергетических ресурсов на осмотр области зоны обзора с большими углами места при сохранении обнаружения целей и сопровождения их траекторий в этой области, то есть достигается заявляемый технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2008 |
|
RU2400766C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2013 |
|
RU2548682C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2413239C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА, ОТДЕЛИВШЕГОСЯ ОТ ОБЪЕКТА-НОСИТЕЛЯ | 2007 |
|
RU2345383C1 |
| Способ радиолокационного обзора пространства | 2017 |
|
RU2676673C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2016 |
|
RU2611434C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2304789C1 |


Изобретение относится к области радиолокации и может быть использовано при радиолокационном обзоре заданной зоны с помощью мобильных радиолокационных станций кругового обзора с антенной в виде одномерной фазированной антенной решетки с электронным управлением лучом по углу места и механическим вращением по азимуту. Достигаемый технический результат - уменьшение затрат временных и энергетических ресурсов на осмотр области зоны обзора с большими углами места при сохранении обнаружения целей и сопровождения их траекторий в этой области. Указанный результат достигается за счет того, что заданную зону обзора по азимуту делят на азимутальные сектора с постоянными границами, в каждом из которых независимо от других секторов осуществляют осмотр одной из двух частей зоны обзора, которые рассчитывают частично перекрывающимися в плоскости дальность - угол места, в каждом азимутальном секторе текущего периода обзора осуществляют выбор части зоны обзора для осмотра этого азимутального сектора на следующем периоде обзора в зависимости от положения сопровождаемых траекторий целей. 5 ил.
Способ радиолокационного обзора с помощью мобильной радиолокационной станции кругового обзора с антенной в виде одномерной фазированной антенной решетки с электронным управлением лучом по углу места и механическим вращением по азимуту, включающий осмотр на каждом периоде обзора одной из двух частей зоны обзора, на которые в координатах дальность - угол места делят заданную зону обзора, обнаружение целей и сопровождение траекторий целей, отличающийся тем, что заданную зону обзора по азимуту заранее делят на азимутальные сектора с постоянными границами, в каждом из которых независимо от других секторов осуществляют упомянутый осмотр одной из двух частей зоны обзора, указанные части зоны обзора заранее рассчитывают частично перекрывающимися в плоскости дальность - угол места, для чего нижние границы по углу места обеих частей зоны устанавливают совпадающими с нижней границей по углу места заданной зоны обзора, верхнюю границу по углу места части зоны обзора с большим углом места устанавливают совпадающей с верхней границей по углу места заданной зоны обзора, в каждом азимутальном секторе текущего периода обзора осуществляют выбор части зоны обзора для осмотра этого азимутального сектора на следующем периоде обзора в зависимости от положения сопровождаемых траекторий целей следующим образом:
- если при осмотре части зоны обзора с меньшим углом места в азимутальном секторе текущего периода обзора координаты хотя бы одной сопровождаемой траектории цели, экстраполированные на следующий период обзора, попадают в неперекрывающуюся по углу места область части зоны с большим углом места, то в этом азимутальном секторе на следующем периоде обзора переходят к осмотру части зоны обзора с большим углом места,
- если при осмотре части зоны обзора с большим углом места в азимутальном секторе текущего периода обзора нет ни одной обнаруженной цели или сопровождаемой траектории цели, координаты которой, экстраполированные на следующий период обзора, попадают в неперекрывающуюся по углу места область этой зоны, то в этом азимутальном секторе на следующем периоде обзора переходят к осмотру части зоны обзора с меньшим углом места.
| СПОСОБ ОСМОТРА ЗОНЫ ОБЗОРА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2345380C1 |
| МНОГОДИАПАЗОННЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2346291C2 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| US 7071868 B2, 04.07.2006 | |||
| US 7336219 B1, 26.02.2008 | |||
| JP 2009250925 A, 29.10.2009 | |||
| 1969 |
|
SU410563A1 | |

