Изобретение относится к области приборостроения и может быть использовано при создании инерциальных систем управления в части определения навигационных параметров ракеты-носителя (РН) и выводимых ею на орбиту космических аппаратов (КА), понимая под навигационными параметрами (НП) составляющие линейных ускорений, скоростей и координат, а также угловых скоростей и координат РН и КА.
Известны способы построения инерциальных систем управления (ИСУ), когда в составе системы в качестве командного прибора (КП) на борту РН устанавливается гиростабилизированная платформа (ГСП), материализующая базовую (инерциальную) систему координат, на базе трехосного (индикаторно-силового) гироскопического стабилизатора (ТГС), а на борту КА устанавливаются бесплатформенные инерциальные навигационные системы (БИНС). На борту каждого РН и КА устанавливается вычислительное устройство (ВУ).
КП РН во время предстартовой подготовки под управлением ВУ РН проводит выставку и прицеливание ГСП, а также калибровку чувствительных элементов (ЧЭ) КП, то есть гироблоков (ГБ) и акселерометров (Акс). Калибровать ЧЭ БИНС во время наземной подготовки не представляется возможным. Выставка (аналитическая) БИНС относительно выставленной на Земле ГСП производится во время полета РН.
Если с РН убрать КП, но оставить ВУ, а вместо БИНС на КА установить КП на базе двухосного индикаторного гироскопического стабилизатора (патент RU 2339002 C1 от 14.05.2007), то есть гибридную инерциальную навигационную систему (ГИНС), то опираясь на особенности ГИНС, можно реализовать следующий способ определения НП РН и КА:
- в качестве КП РН используются все имеющиеся в наличии КП КА, избыточность информации дает возможность повысить точностные характеристики КП КА в  раз (n - количество КА),
раз (n - количество КА),
- конструкция КП КА (ГИНС) позволяет произвести выставку, прицеливание и калибровку во время предстартовой подготовки на Земле,
- во время предстартовой подготовки выведение КА в ВУ РН производится комплексирование показаний ЧЭ КП КА,
- после отделения КА от РН ИСУ каждого КА работает автономно, опираясь на начальные исходные данные, полученные ИСУ КА от ИСУ РН в момент отделения. Данный способ определения НП РН и КА дает возможность уменьшить вес, габариты и стоимость инерциальной навигационной системы управления ИНСУ комплекса (РН + nКА, где n - количество КА) при сохранении точностных характеристик ИНСУ в сравнении с традиционной схемой ИНСУ, если в обоих ИНСУ используется одна и та же элементная база ЧЭ.
Выигрыш в весе ИНСУ ΔВ можно подсчитать по следующей формуле:
ΔB=Вкпрн-n(ВКПКА - ВБИНС)
где Вкпрн - вес КП РН,
ВКПКА - вес КП КА,
ВБИНС - вес БИНС.
На чертеже представлена схема расположения КП и ВУ в составе ИНСУ на ракетном комплексе.
Устройство для определения навигационных параметров ракеты-носителя и космических аппаратов (чертеж) содержит вычислительное устройство (6), установленное на корпусе ракеты-носителя, вычислительные устройства (7), (8), (9), преобразователи аналог-код, код-аналог (13), (14), (15), гибридные инерциальные навигационные системы (10), (11), (12), установленные на корпусах космических аппаратов, выходы вычислительного устройства (6) соединены с входами ВУ (7), (8), (9), выходы ВУ (7), (8), (9) соединены с входами ВУ (6) и входами преобразователей (13), (14), (15), выходы преобразователей (13), (14), (15) соединены с входами ВУ (7), (8), (9) и ГИНС (10), (11), (12), выходы ГИНС (10), (11), (12) соединены с входами преобразователей (13), (14), (15).
1 - ракета-носитель
2 - головная часть
3, 4, 5 - космические аппараты
5 - "n"-ый КА
6 - вычислительные устройства РН
7, 8, 9 - вычислительные устройства КА
10, 11, 12 - гибридная инерциальная навигационная система
13, 14, 15 - преобразователи аналог-коды, коды-аналог.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В ПОЛЕТЕ | 2012 |
|
RU2486472C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ ДОВОДОЧНЫХ СТУПЕНЕЙ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2010 |
|
RU2440557C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ВЕДОМОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ ЭТАЛОННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2505785C1 |
| СПОСОБ ПРЕДСТАРТОВОЙ ВЫСТАВКИ ВЫСОКОТОЧНЫХ РАКЕТ | 1995 |
|
RU2150124C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ "СОЮЗ-2" | 2019 |
|
RU2732520C1 |
| Комбинированная система ориентации и навигации подвижного объекта | 2020 |
|
RU2746236C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИИ | 2012 |
|
RU2504734C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
Изобретение относится к области приборостроения и может быть использовано при создании инерциальных систем управления для определения навигационных параметров ракеты-носителя и космического аппарата, выводимого на орбиту ракетой-носителем. Технический результат - повышение точности. Для достижения данного результата на борту каждого космического аппарата (КА) используют в качестве командных приборов (КП) гироскопическую инерциальную систему (ГИС), приборная площадка (ПП) которой с расположенными на ней акселерометрами является двухосным индикаторным гироскопическим стабилизатором. В качестве КП ракеты-носителя (РН) для определения навигационных параметров (НП) РН используют все комплексы командных приборов (ККП), установленных на борту КА. При подготовке к пуску, включая выставку ПП, прицеливание, калибровку ЧЭ и в полете на участке выведения РН сигналы чувствительных элементов (ЧЭ) ККП КА обрабатывают в бортовых ВУ КА, а затем обрабатывают в бортовом ВУ РН. После отделения КА от РН сигналы ЧЭ ККП КА обрабатывают в бортовых ВУ КА для определения НП КА. 2 н.п. ф-лы, 1 ил.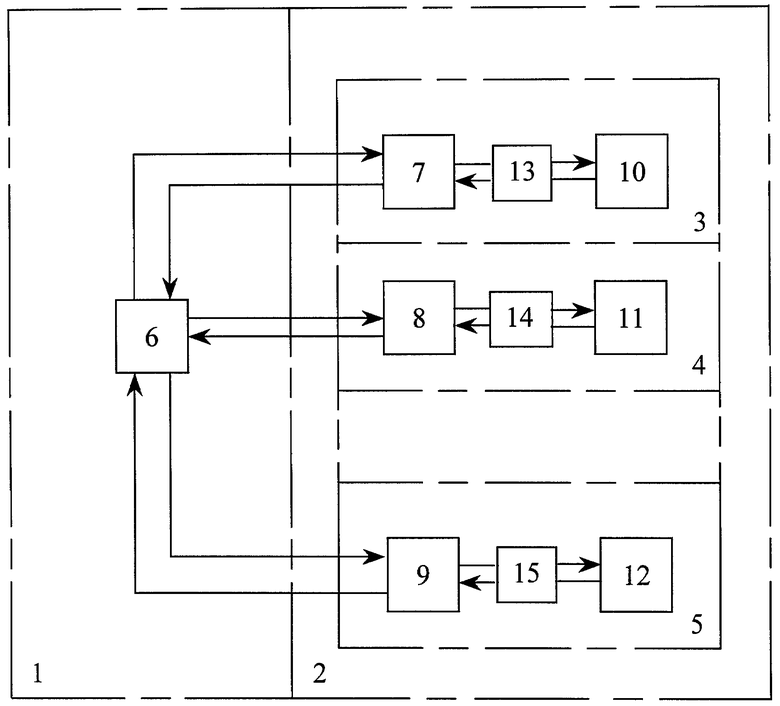
1. Способ определения навигационных параметров (НП) ракеты-носителя (РН) и космических аппаратов (КА) во время подготовки к пуску и во время полета РН и КА путем обработки сигналов чувствительных элементов (ЧЭ) комплексов командных приборов (ККП) в вычислительных устройствах (ВУ) бортовой инерциальной навигационной системы управления (ИНСУ) в составе командных приборов (КП) на базе гиростабилизированной платформы (ГСП) и ВУ, расположенных на РН и ККП на базе бесплатформенной информационной навигационной системы (БИНС) и ВУ, расположенных на каждом КА, отличающийся тем, что на борт каждого КА устанавливают в качестве КП гироскопическую инерциальную систему (ГИС), приборная площадка (ПП) которой с расположенными на ней акселерометрами является двухосным индикаторным гироскопическим стабилизатором, в качестве КП РН для определения НП РН используют все ККП, установленные на борту всех КА, и при подготовке к пуску, включая выставку ПП, прицеливание, калибровку ЧЭ, и в полете на участке выведения РН, для чего сигналы ЧЭ ККП КА обрабатывают в бортовых ВУ КА, а затем обрабатывают в бортовом ВУ РН, после отделения КА от РН сигналы ЧЭ ККП КА обрабатывают в бортовых ВУ КА для определения НП КА.
2. Устройство для определения навигационных параметров (НП) ракеты-носителя (РН) и космических аппаратов (КА), содержащее вычислительные устройства, комплексы командных приборов и преобразовательные устройства, отличающееся тем, что вычислительные устройства устанавливают в корпусе РН и в корпусах КА, преобразовательные устройства и комплексы командных приборов устанавливают в корпусе КА, в качестве комплексов командных приборов (ККП) на корпусах КА устанавливают гироскопическую инерциальную навигационную систему (ГИНС), выходы вычислительных устройств (ВУ) РН соединяют с входами ВУ КА, выходы ВУ КА соединяют с входами ВУ РН и входами преобразовательных устройств (ПУ), выходы ПУ соединяют с входами ВУ КА и входами ГИНС, выходы ГИНС соединяют с входами ПУ.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| РИВКИН С.С | |||
| и др | |||
| Определение параметров ориентации объекта бесплатформенной инерциальной системой | |||
| - СПб.: ГНЦ РФ - ЦНИИ "Электроприбор", 1996, с.30-32 | |||
| RU 2059205 С1, 27.04.1996 | |||
| НИКИТИН Н.Н | |||
| Курс теоретической механики | |||
| - М.: Высшая школа, 1990 | |||
| Льночесальная машина | 1923 |
|
SU245A1 |
| ПЕЛЬПОР Д.С | |||
| Гироскопические | |||

