Предлагаемое изобретение относится к области ракетной техники, в частности к устройствам определения ориентации ракеты космического назначения (РКН).
Актуальность данного изобретения определяется необходимостью повышения точности определения ориентации ракетоносителя в пространстве, постоянном независимом контроле местоположения и резервирования самого процесса ориентирования РКН.
Предпосылки создания изобретения:
Рассмотрение подходов к решению задачи определения ориентации РН следует начать с уже используемых в ракетной технике устройств, альтернативных использованию устройствам для определения ориентации посредством гироскопов.
Известно устройство, основанное на использовании принципов астронавигации. Этот подход используется в системе управления (СУ) межконтинентальных баллистических ракет, в основном морского базирования. В описанном подходе коррекция положения гиростабилизированной платформы (ГСП) производится путем определения направления на заранее заданные небесные светила. Такой подход по своим точностным характеристикам точнее штатного комплекса командных приборов (ККП) [1], что вполне можно применить для решения задачи определения ориентации. Но финансовые затраты на производство аппаратуры астронавигации, построенной на данном принципе, значительно превышают затраты на изготовление штатного ККП.
Известен способ определения ориентации РН с использованием разнесенных антенных устройств навигационной аппаратуры потребителя (НАП). В данном подходе НАП принимает сигналы антенных устройств, находящихся на концах базы, и определяет ориентацию базы в пространстве интерферометрическим методом. Образцов аппаратуры определения ориентации объектов, построенной на данном принципе, для применения в ракетной технике нет. Но погрешность определения ориентации в данном подходе можно оценить по характеристикам аппаратуры МРК-11 ФГУП «НПП «Радиосвязь», построенной с применением рассматриваемого подхода. Погрешность определения угла тангажа данной аппаратурой при базовом расстоянии между антеннами 0,7 метра на порядок превышает погрешность штатных средств определения ориентации РН. Приблизиться к точности штатных средств возможно только путем разнесения антенн описываемой аппаратуры на расстояние 10 метров. Разместить при этом такую аппаратуру на борту РН затруднительно, так как по мере отделения ступеней длина РН может уменьшаться до аварийных 4-5 метров.
В зависимости от физической сущности навигационные параметры делятся на группы:
I. Навигационные параметры, характеризующие положение и перемещение центра масс РКН относительно различных систем отсчета: координаты РКН, ее линейная скорость и ускорение.
П. Навигационные параметры, определяющие перемещение РКН, относительно его центра масс: угловые координаты объекта в горизонтальной системе координат, угловые координаты РКН относительно вектора скорости, угловая скорость перемещения.
III. Навигационные параметры, определяющие состояние окружающей среды: параметры атмосферы, параметры магнитного поля Земли.
IV. Навигационные параметры, характеризующие положение и перемещение РКН относительно других объектов.
Для РКН используются навигационные параметры I, II группы.
Так как на РКН установлена НАП, то существует возможность использовать НАП для определения ориентации РН в полете. В этом случае отпадает необходимость значительной доработки СУ РН, что отразится на стоимости СУ РН.
Причинами, препятствующими получению данным устройством и вышеприведенным способом технического результата, который обеспечивается предлагаемым техническим решением, являются низкая точность ориентации РН и высокая стоимость доработки системы управления РН.
В процессе информационного поиска из уровня техники выявлена система для навигационной избыточности (патент US 7058505 В1, опубликованному 06.06.2006 г. Данная система отличается от заявленного устройства следующим:
- различием получаемых результатов, а именно:
система обеспечивает избыточность навигационных параметров I группы с помощью GPS-приемника (положение центра масс объекта и скорости движения центра масс объекта в гринвичской системе координат (ГСК);
система обеспечивает проверку работоспособности инерциальных измерительных блоков, входящих в систему управления, путем сравнения навигационных параметров I группы, выдаваемых инерциальными измерительными блоками, с данными, получаемыми с GPS-приемника;
при определении работоспособности инерциального измерительного блока (совпадении навигационных параметров I группы), в центральный процессор для дальнейшей работы выдается полный набор навигационных параметров (I и II группы (угловое положение и движение объекта относительно центра масс)).
Кроме того, данная система работает только в системе GPS и ГСК, неиспользуемых в СУ отечественной РКТ.
В составе РКН используется только отечественная элементная база.
Заявленное устройство выдает навигационные параметры I и II группы с помощью информации НАП, установленной на РН, и блока датчика угловых скоростей, и этим самым заменяет работу штатной инерциальной гироскопической системы РКН.
Заявленное устройство работает, используя сигналы отечественной КНС «ГЛОНАСС» и производит расчет навигационных параметров I и II группы в стартовой системе координат (ССК).
Задачей заявленного изобретения является разработка устройства для определения ориентации РН по информации НАП с использованием блока датчиков угловых скоростей, обеспечивающего возможность с определенной дискретностью получать координаты местоположения центра масс РН и угловое положение продольной оси РН в стартовой системе координат.
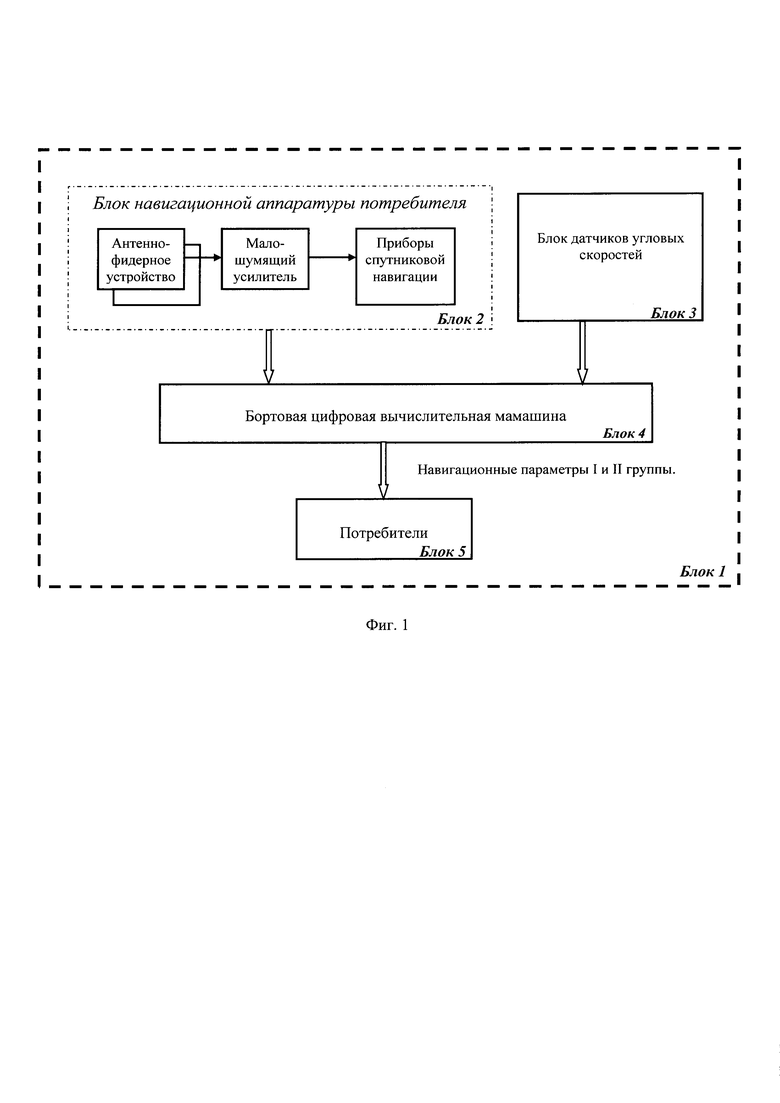
Заявлено устройство для определения пространственной ориентации ракеты космического назначения (блок 1), снабженное блоками навигационной аппаратуры потребителя (НАП) (блок 2) и трехосного гиростабилизатора (ТГС), отличающееся от известных тем, что содержит блок датчиков угловых скоростей (БДУС) (блок 3), входы которого непосредственно подключены к бортовой цифровой вычислительной машине (БЦВМ) (блок 4), что обеспечивает точное определение полного набора навигационных параметров и выдачу их потребителям (блок 5) РКН в полете и позволяет полностью заменить установленный штатный блок ТГС, показанное схематично на фиг. 1.
Блок датчиков угловых скоростей предназначен для измерения мгновенной угловой скорости РН в проекциях на оси ССК, выдачи в БЦВМ (блок 4) цифровой информации об измеряемой угловой скорости.
В состав БДУС входит блок чувствительных элементов, минимально состоящий из трех чувствительных элементов, например, акселерометров.
Техническим результатом изобретения является получение значений навигационных параметров ориентации РН по информации НАП с условием минимальной доработки СУ РН и повышение точности ориентации, замены (резервирования) используемых на данный момент гироскопических навигационных систем и, как следствие, удешевление и повышение возможности успешного выполнения задач РКН.
Требуемый технический результат достигается тем, что измеренные БДУС угловые скорости совместно с получаемой информацией НАП поступают в арифметико-логическое устройство и там с помощью алгоритмов расчета, определяется местоположение центра масс РН и угловое положение продольной оси РН в ССК.
Действие данного устройства заключается в следующем:
По измерительной информации НАП арифметико-логическое устройство определяет проекции абсолютного вектора скорости объекта, на котором она установлена.
Одновременно в арифметико-логическое устройство поступает измерительная информация от БДУС, по которой рассчитывается угловое положение продольной оси РН.
Таким образом, по поступающей измерительной информации НАП и БДУС и с помощью алгоритмов расчета арифметико-логического устройства определяется точное местоположение РН в полете.
Суть определения ориентации РН по информации НАП заключается в сопоставлении ориентации РН с ориентацией вектора кажущегося ускорения в пространстве и определении этого вектора в двух стартовых координатах (СК) по данным НАП и минимально трех акселерометров БДУС. Определение углов ориентации РН осуществляется путем расчета элементов матрицы перехода между этими двумя СК.
Таким образом, положительный эффект установки ориентации РН по информации НАП с помощью БДУС состоит:
- в обеспечении ориентации РН по измерениям НАП и БДУС;
- в обеспечении необходимой точности ориентации РН;
- в дублировании (замене) угловых измерений штатным блоком ТГС;
- в невысокой стоимости предлагаемого изобретения;
- в использовании сигналов отечественной КНС «ГЛОНАСС»;
- в использовании отечественной элементной базы.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. ГОСТ Р 51794-2001. Аппаратура радионавигационная глобальной навигационной спутниковой системы и глобальной системы позиционирования Системы координат Методы преобразований координат определяемых точек Госстандарт России, Москва.
2. Под ред. В.И. Варфоломеева и М.И. Копытова. Проектирование и испытания баллистических ракет / - М.: Оборонгиз, 1970. - 392 с., ил.
3. Н.И. Паничкин, Ю.В. Слекушкин, В.П. Шинкин, Н.А. Яцинин. Конструкция и проектирование космических летательных аппаратов: Учебник для средних учебных заведений / - М.: Машиностроение, 1986. - 344 с., ил.
4. Пенцак И.П. Теория полета и конструкция баллистических ракет: Учебное пособие для техникумов. - М.: Машиностроение, 1974. - 344 с., ил.
5. Под редакцией Харисова В.Н., Перова А.И., Болдина В.А. Глобальная спутниковая радионавигационная система ГЛОНАСС, М., ИПРЖР, 1998 г. - 400 с.
Изобретение относится к ракетной технике. Устройство для определения пространственной ориентации ракеты космического назначения «Союз-2», с установленными на борту штатными блоками навигационной аппаратуры потребителя и трехосного гиростабилизатора, содержит блок датчиков угловых скоростей, входы которого непосредственно подключены к бортовой цифровой вычислительной машине. В состав блока датчиков угловых скоростей входит блок чувствительных элементов, состоящий по меньшей мере из трех акселерометров. Повышается точность ориентации. 1 ил.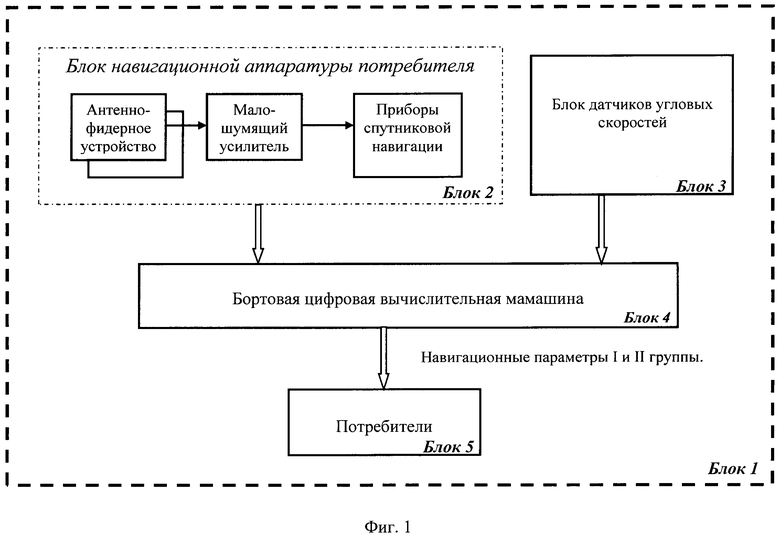
Устройство для определения пространственной ориентации ракеты космического назначения «Союз-2», с установленными на борту штатными блоками навигационной аппаратуры потребителя (НАП) и трехосного гиростабилизатора (ТГС), отличающееся тем, что содержит блок датчиков угловых скоростей (БДУС), входы которого непосредственно подключены к бортовой цифровой вычислительной машине, при этом в состав БДУС входит блок чувствительных элементов, состоящий по меньшей мере из трех акселерометров.
| RU 2016148272 A, 08.06.2018 | |||
| Звездный путь "Прогресса"/Б.В | |||
| Беляков; Самара: Изд-во СамНЦ РАН, - 2014, 388 с.: илл.; стр | |||
| Нефтяная топка для комнатных печей | 1922 |
|
SU326A1 |
| Теория гироскопических стабилизаторов: учебноепособие / А.Н | |||
| Лысов, А.А | |||
| Лысова | |||
| - Челябинск Издательский центр ЮУрГУ, 2009 | |||
| Аппарат для испытания прессованных хлебопекарных дрожжей | 1921 |
|
SU117A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ | 2016 |
|
RU2654321C1 |
| US | |||

