Изобретение относится к управлению взаимным положением объектов и может быть использовано при проведении измерений, при фотосъемке и в ряде других областей для фиксации взаимного углового положения объектов в определенные моменты времени, например фотокамеры и объекта съемки, в случаях, когда стабилизировать взаимное угловое положение объектов механическими средствами невозможно или нецелесообразно.
Известна система компенсации отклонений взаимного углового положения объектов, содержащая видеотерминал, блок памяти, фиксирующий предшествующее изображение объекта, анализатор образа, обрабатывающий текущее и предшествующее изображения и формирующий сигнал приведения текущего изображения к предшествующему, а также видеопроцессор, осуществляющий указанное приведение, заменяющий недостающие в текущем изображении точки на таковые из предшествующего изображения и формирующий выходное изображение (см. WO 9949657, H04N 5/232, 1999).
Недостатком данной системы является ее сложность и низкая помехоустойчивость (к видеопомехам).
Известна также система компенсации отклонений взаимного углового положения объектов, содержащая два датчика вибрации, подключенных к блоку распознавания источника вибрации на базе микропроцессора, выход которого подключен к исполнительному механизму, стабилизирующему взаимное угловое положение объектов путем компенсации нежелательной вибрации и отработки намеренного смещения (см. US 5842054, G02B 27/64, 1998).
Недостатком данной системы является низкое быстродействие, связанное с тем, что компенсация помех (нежелательных или случайных отклонений) производится путем изменения углового положения объекта, т.е. сопряжена с преодолением его инерции.
Наиболее близкой к предложенной является система компенсации отклонений взаимного углового положения объектов, содержащая последовательно соединенные аналого-цифровой преобразователь, блок регистрации колебаний, выполненный в виде анализатора цифрового видеосигнала, процессор, блок управления и блок запоминания (см. US 5648815, H04N 5/14, 1997). В этом устройстве процессор через блок управления осуществляет формирование полного вектора движения и корректировку изображения (т.е. корректировку всех элементов информационного сигнала управляемого объекта, в рассматриваемом случае-видеокамеры) в зависимости от величины и направления этого вектора.
Недостатком данной системы также является низкое быстродействие и сложность, обусловленные сложным и трудоемким алгоритмом определения полного вектора движения и сложностью корректировки массива элементов изображения.
Техническим результатом, ожидаемым от использования изобретения, является упрощение системы, повышение ее быстродействия при одновременном повышении качества стабилизации взаимного углового положения объектов электронными средствами.
Указанный результат достигается тем, что в известной системе компенсации отклонений взаимного углового положения объектов, содержащей последовательно соединенные блок регистрации колебаний и процессор, блок регистрации колебаний выполнен в виде последовательно соединенных измерителя угловых отклонений и амплитудного детектора, а процессор выполнен в виде последовательно соединенных частотного анализатора и блока задержки, причем выход синхронизации управляемого объекта соединен с управляющим входом блока задержки, выход которого соединен с входом синхронизации управляемого объекта.
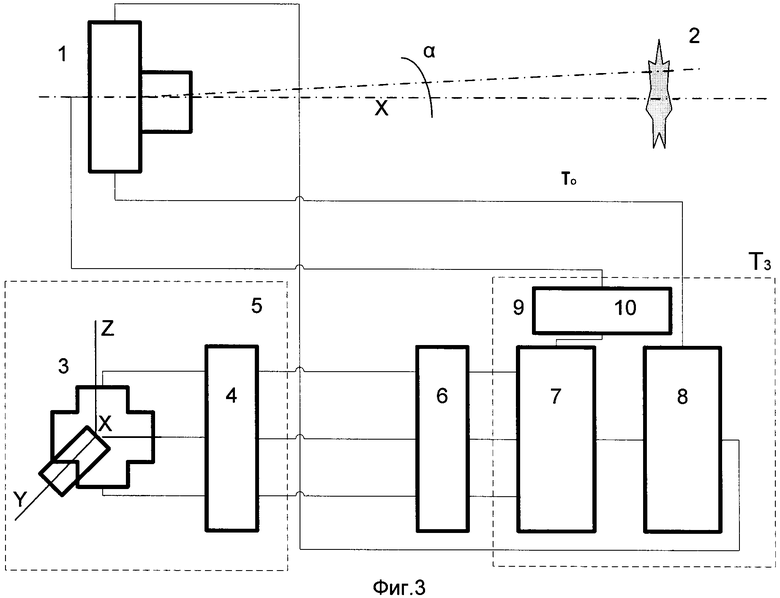
На фиг.1 приведена блок схема предлагаемого устройства (один из возможных примеров реализации), на фиг.2 - временные диаграммы, поясняющие его работу. Фиг.3 иллюстрирует вариант выполнения с обратной связью и корректируемым алгоритмом предсказания.
Управляемый объект 1 на фиг.1 - прибор, устройство или камера, положение которой необходимо стабилизировать, например, в момент измерений или съемки относительно объекта 2 контроля или съемки. Система содержит последовательно соединенные трехосный датчик углового ускорения (акселерометр 3), блок 4 двойного интегрирования (акселерометр 3 и блок 4 образуют измеритель угловых отклонений 5), амплитудный детектор 6, частотный анализатор 7, блок задержки 8. Анализатор 7 и блок 8 образуют процессор 9. Как показано на фиг.3, в состав процессора 9 может входить также блок 10 обратной связи.
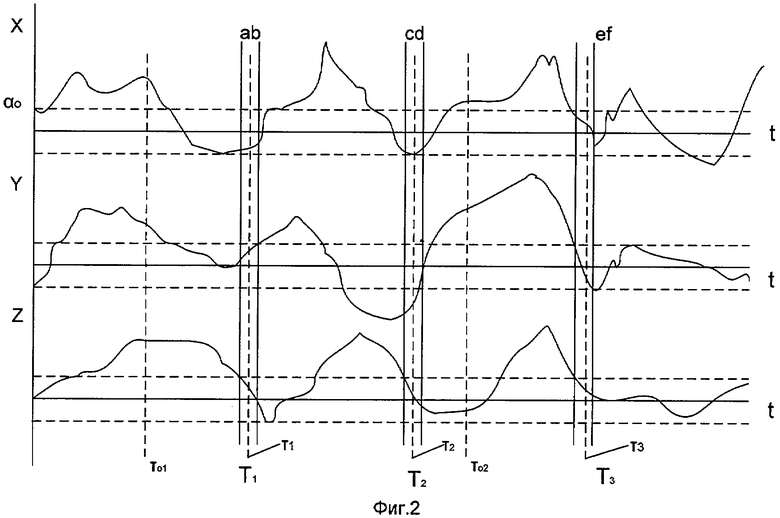
Анализатор 7 может быть выполнен программными средствами или аппаратными. В последнем случае может быть использован любой известный измеритель длительности интервала времени между интервалами ab, cd и ef (фиг.2).
Устройство работает следующим образом. Отклонение объекта 1 от оси X на угол α (фиг.1) фиксируется измерителем 5. Последний может быть выполнен так, как показано на фиг.1, т.е. в виде акселерометра 3 и блока 4, на выходе которого присутствует информация о величине углового отклонения по соответствующим осям. Абсолютная величина этого отклонения сопоставляется в детекторе 6 с заданным пороговым значением αo, так что на выходе детектора 6 присутствует сигнал, означающий нахождение отклонения по соответствующей оси в коридоре, показанном на фиг.2 пунктиром.
Анализатор 7, путем накопления в течение заданного времени информации о нескольких интервалах, например ab и cd, когда, как показано на фиг.2, отклонения по всем трем осям не превышают заданную величину αо, формирует следующий, ожидаемый интервал ef, в течение которого отклонения предположительно также не выйдут за пределы +αo. Алгоритм работы анализатора 7 и процессора 9 в целом может быть более сложным, в частности включать цифровые фильтры для отстройки от помех самого различного характера, использовать известные алгоритмы предсказания.
Так, например, при использовании устройства для проведения фотосъемки в сложных условиях, в момент τо2 оператор или внешняя система управления подают сигнал на срабатывание объекта 1, например на осуществление съемки объекта 2. Однако съемки в этот момент не происходит, поскольку блок 8 подает сигнал на вход синхронизации управляемого объекта 1 только в момент Т3.
Возникающая при этом незначительная задержка обеспечивает эффект стабилизации углового положения объекта 1, его направленность на объект 2 в момент съемки. Если сигнал на съемку поступил в момент τо1, система сформирует (по результатам накопления и анализа информации в предшествующие периоды) сигнал синхронизации в момент Т1 или два сигнала в моменты Т1 и Т2. Наиболее целесообразно выбирать моменты Т1, Т2 и Т3 в середине интервалов ab, cd и ef, причем для съемки в движении значение угловой скорости (ускорения) по осям в плоскости движения выбирают не вблизи нуля, а в окрестностях значения, максимально компенсирующего относительную угловую скорость смещения для объектов на дистанции съемки.
Блок 10 обратной связи (фиг.3) служит для коррекции алгоритма анализатора 7 по результатам съемки. В блоке 10 происходит анализ качества совмещения углового положения в момент срабатывания объекта 1, например, путем фиксации углового рассогласования или анализа качества изображения. Сигнал рассогласования управляет работой анализатора 7 путем изменения коэффициентов, алгоритма фильтрации или предсказания с целью снижения углового рассогласования объектов 1, 2.
Система может быть выполнена с использованием микропроцессорной техники или аналоговой. Существенным является лишь наличие последовательно соединенных измерителя угловых отклонений, блока формирования интервала следующего (прогнозируемого) после последнего попадания одного, двух или всех трех (по числу учитываемых осей) отклонений в заданный диапазон и блока, формирующего задержку сигнала на срабатывание объекта 1 до этого прогнозируемого момента. Максимальный эффект от использования предлагаемой системы достигается при компенсации периодических отклонений, возникающих при вибрации, поскольку в этом случае предсказание амплитуды и фазы одной или нескольких основных гармоник колебаний позволяют максимально точно выбрать момент срабатывания даже с учетом задержки управляемого устройства.
Следует отметить также, что в условиях фотосъемки представляет интерес именно угловое смещение и его скорость и ускорение (угловые), для чего используется датчик углового ускорения, однако выполнить его можно, используя датчики обычного ускорения (особенно в геометрически характерных местах) и пересчитывая из линейных ускорений в угловые с учетом радиуса.
Более того, для некоторых применений может иметь значение положение момента срабатывания относительно линейных ускорений как физических, так и относительных, полученных, например, из обработки изображения (сцепка вагонов, стыковка авиазаправщиков и пр.). В этом случае все сказанное выше для угловых ускорений, скоростей и перемещений следует распространить на линейные.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИЗМЕРЕНИЙ ЦЕНТРА ОЖИДАЕМОГО СЕЙСМИЧЕСКОГО УДАРА | 2010 |
|
RU2426155C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| СПОСОБ ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ГЕОТЕХНИЧЕСКИХ СИСТЕМ И БОРТОВОЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2307324C1 |
| СПОСОБ ФАЗОВОЙ РЕНТГЕНОГРАФИИ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2115943C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ УГЛОВОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 1996 |
|
RU2112926C1 |
| АЭРОФОТОАППАРАТ | 2010 |
|
RU2451316C1 |
| УСТРОЙСТВО КОДИРОВАНИЯ ДВИЖУЩИХСЯ ИЗОБРАЖЕНИЙ, СПОСОБ И ПРОГРАММА УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2004 |
|
RU2335859C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| СИСТЕМА ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2413274C1 |
Изобретение относится к области приборостроения и может найти применение при проведении измерений, при фотосъемке и в ряде других областей для фиксации взаимного углового положения объектов в определенные моменты времени, например фотокамеры и объекта съемки, в случаях, когда стабилизировать взаимное угловое смещение объектов механическими средствами невозможно или нецелесообразно. Технический результат - повышение быстродействия. Для достижения данного результата система содержит последовательно соединенные блок регистрации колебаний и процессор. Блок регистрации колебаний выполнен в виде последовательно соединенных измерителя угловых отклонений и амплитудного детектора. Процессор выполнен в виде последовательно соединенных частотного анализатора и блока задержки. Выход синхронизации управляемого объекта соединен с управляющим входом блока задержки, выход которого соединен с входом синхронизации управляемого объекта. 3 ил.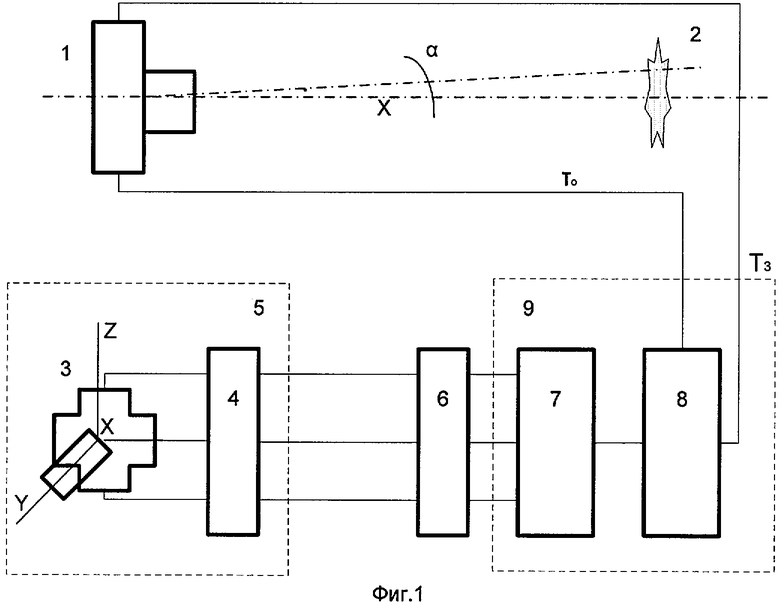
Система компенсации отклонений взаимного углового положения объектов, содержащая последовательно соединенные блок регистрации колебаний и процессор, отличающаяся тем, что блок регистрации колебаний выполнен в виде последовательно соединенных измерителя угловых отклонений и амплитудного детектора, а процессор выполнен в виде последовательно соединенных частотного анализатора и блока задержки, причем выход синхронизации управляемого объекта соединен с управляющим входом блока задержки, выход которого соединен с входом синхронизации управляемого объекта.
| US 5648815 А, 15.07.1997 | |||
| US 5842054 А, 24.11.1998 | |||
| WO 9949657 A1, 30.09.1999 | |||
| Способ получения сероуглерода | 1977 |
|
SU632649A1 |
| Электронные тензовесы | 1976 |
|
SU541092A1 |

