Изобретение относится к построению дозвуковых летательных аппаратов, преимущественно беспилотных, к средствам управления летательными аппаратами, служит для повышения их безопасности и надежности и может быть использовано при их проектировании.
Известна система управления беспилотного летательного аппарата (БЛА), содержащая средства управления полетом, компьютер, измеритель скорости относительно воздуха и измеритель скорости относительно земли (GPS). Компьютер управляет средствами управления полетом так, что БЛА перед посадкой совершает круг, по разности показаний измерителей компьютер вычисляет скорость ветра в месте посадки и осуществляет безопасную посадку с использованием полученной величины (см. JP 2008207705 (А), 2008-09-11, B64F 1/36).
Недостатком известного устройства является низкая надежность: учет направления воздушных потоков производится только при посадке и с недостаточным быстродействием. В результате БЛА оказывается неуправляемым в сложной и быстроменяющейся аэродинамической обстановке.
Те же недостатки присущи системам, использующим наземные средства измерения ветровой обстановки (см. патент США № 4058010, G05D 1/06, 1977 г.)
Известны БЛА в форме вентилятора или блюдца (см. WO 0015497 (А2), В64С 29/00 В2В, 2000 г. или патент США № 4461436, В64С 27/20, 1984 г.). Системы стабилизации (обеспечения безопасности полетов) в них образованы гироскопами.
Подобные системы стабилизации имеют ограниченный запас устойчивости.
Известна также система, обеспечивающая краткосрочное предсказание волновой обстановки (см. патент Великобритании № 2320829, G01S 7/41А, 1998 г.). Система содержит оптический, инфракрасный или радиочастотный определитель расстояния, фиксирующий две последовательные «картины» морской поверхности. В полученные «картины» вводят поправку на движения судна и вычисляют амплитуды и фазы волновых движений морской поверхности для каждой из «картин». Соответствующие блоки вычисляют предстоящий период квазипокоя. Эта информация передается на совершающий посадку на судно ЛА.
Это устройство, так же как и описанные выше, не обеспечивает необходимого запаса устойчивости в течение всего полета ЛА, поскольку не получает всего объема информации, необходимого для решения задачи, и не обладает быстродействием, сопоставимым с постоянной времени управления ЛА.
Наиболее близкой к предложенной является система повышения безопасности полета малоразмерного, существенно нестационарного БЛА путем его стабилизации, содержащая датчик угла, датчик угловой скорости, последовательно соединенные задатчик угла и блок сравнения, второй вход которого соединен с выходом датчика угла, и последовательно соединенные сумматор и исполнительное устройство, а также задатчик опорного сигнала, последовательно соединенные датчик скоростного напора и блок деления, второй вход которого подключен к выходу задатчика опорного сигнала, первый блок умножения, первый вход которого соединен с выходом блока сравнения, второй - с выходом блока деления, а выход - с первым входом сумматора, и последовательно соединенные блок масштабирования, вход которого соединен с выходом блока деления, и второй блок умножения, второй вход которого соединен с выходом датчика угловой скорости, а выход - со вторым входом сумматора (см. патент РФ №2338236, G05D 1/08, 2007.04.27). Задатчик угла, блок сравнения, сумматор, задатчик опорного сигнала, блок деления, первый блок умножения, блок сравнения, блок масштабирования и второй блок умножения образуют процессор, который обрабатывает информацию датчика угла, датчика угловой скорости и датчика скоростного напора и формирует управляющий сигнал на исполнительное устройство.
Однако эффективность данной системы также ограничена при воздействии переменно направленных воздушных потоков из-за наличия определенной постоянной времени и отсутствия информации о воздушных потоках.
Техническим результатом, ожидаемым от использования изобретения, является повышение запаса устойчивости системы стабилизации дозвукового летательного аппарата в сложной, быстроменяющейся аэродинамической обстановке как в процессе полета, так и при посадке.
Указанный результат достигается тем, что известная система повышения безопасности полета малоразмерного летательного аппарата, содержащая последовательно соединенные блок датчиков, процессор и исполнительный механизм, снабжена ультразвуковым и/или радиочастотным локаторами, выходы которых через блок управляемой задержки соединены со вторым входом процессора, при этом второй выход блока датчиков соединен с управляющим входом блока управляемой задержки.
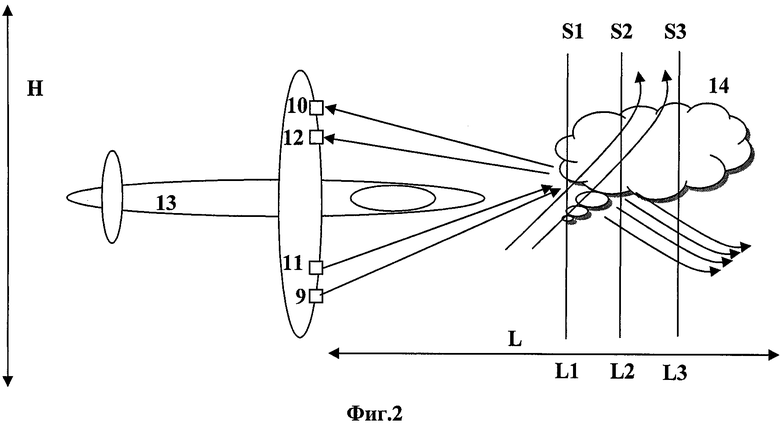
На фиг.1 изображена функциональная схема предлагаемого устройства, а на фиг.2 схематично показано расположение локаторов на ЛА.
Система стабилизации ЛА (фиг.1) содержит первичные датчики 1, 2 угла и скорости соответственно, выходы которых соединены со входами блока 3 интерфейса. Датчики 1, 2 и блок 3 интерфейса образуют блок 4 первичных датчиков, в состав которого могут входить также другие датчики положения, угловой скорости или ускорения. Выходы блока 4 первичных датчиков подключены к первому входу (первой группе входов) процессора 5, выход (выходы) которого подключен к соответствующим исполнительным механизмам 6, непосредственно управляющим полетом ЛА. Система содержит также последовательно соединенные блок локаторов 7 и блок управляемой задержки 8.
Радиочастотный локатор образован излучателем 9 и приемником 10 (фиг.2), ультразвуковой локатор - излучателем 11 и приемником 12. Оба локатора (или один из них) установлены на ЛА 13 и образуют блок локаторов 7. Алгоритм совместной работы блоков локаторов 7 и управляемой задержки 8 и, соответственно, возможные варианты их реализации будут ясны из описания работы системы в целом и данных блоков в частности. Блок 3 интерфейса представляет собой многоканальный аналого-цифровой преобразователь, все или часть входов или выходов которого (в зависимости от выполнения блока 8 с аналоговым или цифровым управлением соответственно), напрямую или через усилитель, формирователь, преобразователь или иной аналогичный блок, формирующий обобщенный сигнал отклонения ЛА 13 от заданной траектории, положения в пространстве, и линейной скорости (эта информация необходима для вычисления подлетного времени) образует второй выход блока 4 первичных датчиков.
Система работает следующим образом. Информация о текущем и заданном положении ЛА, его скорости, отклонении от курса, крене и т.д. с выхода блока 4 первичных датчиков поступает в процессор 5. Последний формирует сигналы, подающиеся на исполнительные механизмы 6, управляющие положением ЛА 13 с целью удержания заданного пространственного положения, скорости, углового положения, курса.
Описанная часть системы управления общеизвестна и используется в том или ином виде на любом ЛА. Однако, как уже отмечалось выше, в сложных аэродинамических условиях, когда ЛА подвергается мощному воздействию разнонаправленных воздушных потоков, такая система управления оказывается неустойчивой, поскольку не может вовремя реагировать на быстроменяющуюся обстановку. Возрастают отклонения ЛА 13 от заданного положения, и за счет запаздывания сигналов управления ЛА 13 может потерять устойчивость.
Следует пояснить, что наиболее целесообразным является применение предлагаемого устройства для малогабаритных и беспилотных ЛА, имеющих малые постоянные времени (до 0,5 с) по управлению, что достижимо для многих аппаратов за счет, например, повышения энерговооруженности, использования направленных струй, специальных аэродинамических конструкций и т.п., и при этом низкие (дозвуковые) скорости. В этом случае ограниченный радиус ультразвуковой подсветки (десятки метров) все еще целесообразен для получения информации о турбулентностях по курсу. При этом ультразвуковой локатор, имеющий малый вес, может быть без труда размещен на таком ЛА. Для пилотируемого ЛА целесообразна более сложная комбинированная система с дополнительным использованием уже присутствующего на борту радиолокатора или специально размещенного для этих целей малогабаритного локационного датчика небольшого радиуса действия (например, на диапазон частот 36 ГГц и более).
В изобретении решается задача и, соответственно, реализуется следующий алгоритм формирования сигналов коррекции:
A) непрерывного слежения за скоростью и направлением воздушных потоков в непосредственной близости от ЛА.
Б) формирование сначала полной картины распределения указанных потоков и их скоростей в пространстве в момент измерения t0, а затем вычисление подлетного времени tп с учетом скорости ЛА 13 и предсказание полной картины распределения потоков и их скоростей в пространстве через подлетное время, т.е. в момент t0+tп путем решения соответствующей системы уравнений, описывающих развитие картины распределения аэродинамических потоков или, в простейшем случае, предполагая данную картину статической на время tп. Иными словами, если сначала фиксируется массив данных, описывающий распределение мгновенных скоростей воздушных потоков в момент t0 на всю глубину L, то затем рассчитываются подлетные времена tп1, tп2, tп3: tпi=Li/v, где v - скорость ЛА 13, и формируются аналогичные массивы для сечений S1, S2 и S3.
B) формирование набора(ов) корректирующих сигналов для соответствующих сигналов управления, поступающих с выхода процессора 5 на входы исполнительных механизмов 6 в предположении, что коррекция осуществляется в момент t0+tп., т.е. в сечениях S1, S2 и S3.
Г) подача указанных сигналов в момент времени, предшествующий моменту воздействия воздушного потока на ЛА 13 на постоянную времени управления τ по соответствующему каналу управления (в общем случае τi), т.е. в момент t0+tп-τi.
Реализация указанного алгоритма возможна как аппаратными, так и программными средствами. В блоке 8 накапливается информация о распределении скоростей воздушных потоков и эта картина пересчитывается на моменты попадания ЛА 13 в сечения S1, S2 и S3. В процессоре 5 формируются сигналы коррекции для этих моментов времени, и с отрицательным сдвигом в постоянную времени по соответствующему каналу они подаются на исполнительные механизмы 6. Разумеется, тот же результат может быть достигнут, если блок 8 управляемой задержки реализовать программными средствами в составе процессора 6.
Пусть, например, ЛА 13 движется прямым курсом со скоростью 40 м/с и датчик угла 1 регистрирует отклонение от заданного курса величиной 1°. После усиления и преобразования в код в блоке 3 интерфейса указанный сигнал рассогласования поступает в процессор 5, который формирует пропорциональный управляющий сигнал на эйлероны ЛА 13, стремящийся вернуть ЛА 13 на заданный курс. Предположим также, что приемник 10 или приемники 10, 12 фиксируют в начальный момент времени прямо по курсу в 25 и 40 м наличие двух потоков, скорость которых превышает пороговую величину 2 м/с и составляет 15 и 25 м/с соответственно, причем первый направлен снизу вверх, а второй сверху вниз, как это схематично изображено на фиг.2. Очевидно, что ЛА испытает их воздействие через 0,62 с и 1,0 с, причем величина воздействия будет пропорциональна скорости потоков и сечению ЛА 13 и составит, например, 30 и 50 Н. Тогда, учитывая, что постоянная времени управления эйлеронами (точнее эффективная постоянная времени управления по каналу управления высотой) ЛА 13 составляет 0,4 с, необходимо сформировать дополнительное корректирующее воздействие на рулевые механизмы, обеспечивающее компенсацию сноса вверх в 30 и вниз в 50 Н в моменты 0,22 с и 0,6 с от начального.
Этот пример показывает как в предлагаемой системе стабилизации формируются управляющие сигналы и как они корректируются. Разумеется, в реальной системе этот процесс итерационен и непрерывно повторяется.
Использование раздельных приемных и передающих трактов как для радио, так и для эхолокатора необязательно: реализация может допускать и совмещение трактов в одном, особенно в ультразвуковом локаторе, где те же излучатели в паузах используются для приема - тогда на обоих крыльях (или в других местах размещения) их по прежнему может быть два, для создания стереобазы например, но уже в виде приемопередатчиков.
Еще одно преимущество изобретения заключается в совместном использовании радиочастотного и ультразвукового локаторов: эффективность радиочастотного локатора в отношении неоднородностей воздушной среды в ближней зоне существенно возрастает в присутствии ультразвука, поскольку имеет место эффект повышения контрастности воздушных вихрей в СВЧ-полях за счет модуляции плотности среды ультразвуковой подсветкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКУСТИЧЕСКАЯ СИСТЕМА ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434278C1 |
| Бортовая система беспилотного летательного аппарата (БЛА) с автономной коррекцией координат | 2018 |
|
RU2703806C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ ОПТИКО-ВИЗУАЛЬНОГО МОНИТОРИНГА | 2006 |
|
RU2320519C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
| СТРАТЕГИЧЕСКАЯ АВИАЦИОННАЯ ТРАНСАРКТИЧЕСКАЯ СИСТЕМА | 2020 |
|
RU2736530C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2212702C1 |
| СИСТЕМА ЗАПРАВКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ТОПЛИВОМ В ПОЛЕТЕ | 2021 |
|
RU2777576C1 |
Изобретение относится к построению дозвуковых летательных аппаратов, преимущественно беспилотных, к средствам управления летательными аппаратами, и служит для повышения их безопасности и надежности. Техническим результатом, ожидаемым от использования изобретения, является повышение запаса устойчивости системы стабилизации дозвукового летательного аппарата в сложной, быстроменяющейся аэродинамической обстановке как в процессе полета, так и при посадке. Система содержит последовательно соединенные блок датчиков, процессор и исполнительный механизм, кроме того. она снабжена ультразвуковым и/или радиочастотным локаторами, выходы которых через блок управляемой задержки соединены со вторым входом процессора, второй выход блока датчиков соединен с управляющим входом блока управляемой задержки. 2 ил.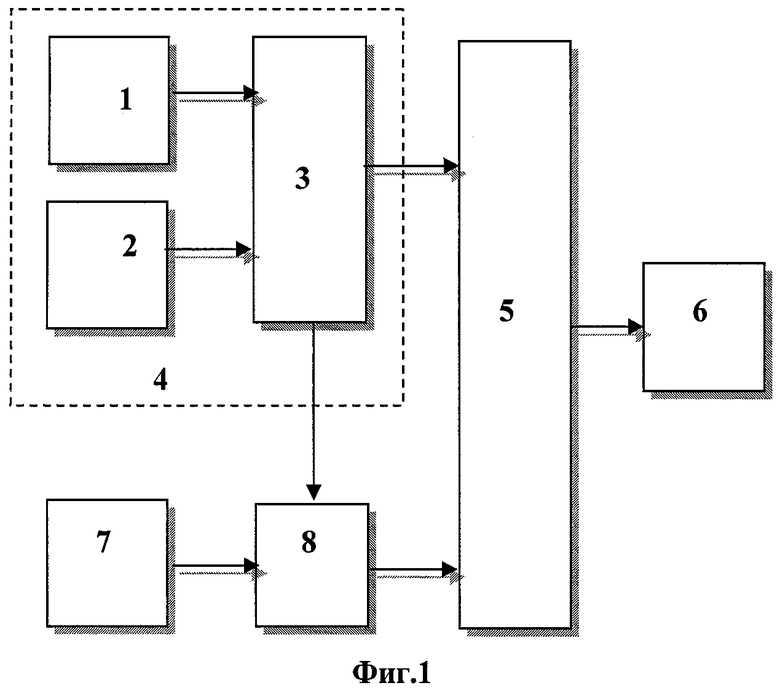
Система повышения безопасности полета малоразмерного летательного аппарата, содержащая последовательно соединенные блок датчиков, процессор и исполнительный механизм, отличающаяся тем, что она снабжена ультразвуковым и/или радиочастотным локаторами, выходы которых через блок управляемой задержки соединены со вторым входом процессора, при этом второй выход блока датчиков соединен с управляющим входом блока управляемой задержки.
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2003 |
|
RU2251136C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| БОРТОВАЯ СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ДЛЯ УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2338236C1 |
| CN 101515178 A, 26.08.2009. | |||

