ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системам для упаковывания грузов, в особенности размещенных на поддонах и состоящих из одного или более изделий, распределенных более-менее равномерно на поддоне так, что на практике груз можно легко обрабатывать и транспортировать.
УРОВЕНЬ ТЕХНИКИ
Как известно, размещенные на поддонах грузы обычно покрываются упрочняющей оболочкой, которая закрепляет их на поддоне так, что они затем могут транспортироваться без риска падения или опрокидывания.
Чтобы обеспечить указанную упрочняющую оболочку, обычно плотно обертывают стороны груза и поддона пластиковой пленкой, сматываемой с катушки.
Для такого упаковывания главным образом применяются автоматические или полуавтоматические системы.
В одной из наиболее широко используемых упаковочных систем используется автомат с перемещающейся упаковочной головкой, оснащенной катушкой с упаковочной пленкой.
Подвижный автомат обычно содержит робот с сочлененной рукой, который для обматывания упаковочной пленки вокруг груза, и управляет упаковочной головкой, совершающей вокруг груза, который в основном остается неподвижным, подъемно-вращательные движения.
Альтернативно, подвижный автомат работает, перемещая упаковочную головку вертикально и одновременно оборачивая упаковочную пленку вокруг размещенного на поддоне груза, поворачивающегося на вращающейся платформе.
Обычной практикой является оснащение систем традиционного типа автоматическим блоком смены упаковочной головки, который убирает головку на хранение, когда в катушке заканчивается упаковочная пленка, и устанавливает готовую к использованию новую головку.
Находящиеся на хранении упаковочные головки обычно помещаются на стержни внешней рамы, на которых они подвешены ожидая момента использования.
Чтобы подвижный автомат мог использовать упаковочные головки, они оснащаются специальными устройствами для захвата, представляющими собой круглую пластину с радиальными выемками, в зацепление с которыми входит подвижная клиновая система, смонтированная на руке робота и работающая от одного или более пневматических цилиндров, также установленных на руке робота.
Как только упаковочная головка оказывается у руки робота, устанавливается электрическое соединение и соединение на пневматическую подачу, что обеспечивает работу в режиме упаковывания размещенного на поддоне груза.
Эти традиционные системы упаковывания обладают определенными недостатками, касающимися применяемого в них автоматического сменного блока.
Фактически использование подвижной клиновой системы существенно усложняет как конструкцию, так и функционирование подвижных автоматов.
Подвижность клиньев должна гарантироваться посредством сложной электронной системы, управляющей и контролирующей работу пневматических цилиндров и устройства подачи сжатого воздуха для их питания, что неудобно.
Нельзя отрицать и тот факт, что автоматический сменный блок в существующем виде является достаточно громоздким и дорогим.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Основная цель настоящего изобретения - предложить систему для упаковывания грузов, в которой будут устранены упомянутые выше недостатки существующих систем, что сделает возможным на практике легко и просто рациональным экономичным путем заменять упаковочные головки.
Достижение цели обеспечивается предлагаемой системой для упаковывания грузов, имеющей по меньшей мере один подвижный автомат с по меньшей мере одной упаковочной головкой, оснащенной по меньшей мере одной катушкой с пленкой для упаковывания груза, при этом упаковочная головка, содержащая первые подвижные соединительные средства во внешней опорной раме для хранения головки и вторые подвижные соединительные средства в подвижном автомате, отличающейся тем, что вторые подвижные соединительные средства содержат по меньшей мере один по существу вертикальный крепежный элемент, соединенный по меньшей мере с чем-то одним из упаковочной головки и подвижного автомата, и по меньшей мере один опорный элемент, соединенный с чем-то другим из упаковочной головки и с подвижного автомата, и который может быть соединен с крепежным элементом вдоль общего и по существу вертикального направления зацепления и расцепления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие особенности и преимущества настоящего изобретения станут более очевидными из подробного описания предпочтительного, но не исключительного варианта системы для упаковывания грузов, поясняемого с помощью неограничивающего примера на прилагаемых чертежах, на которых:
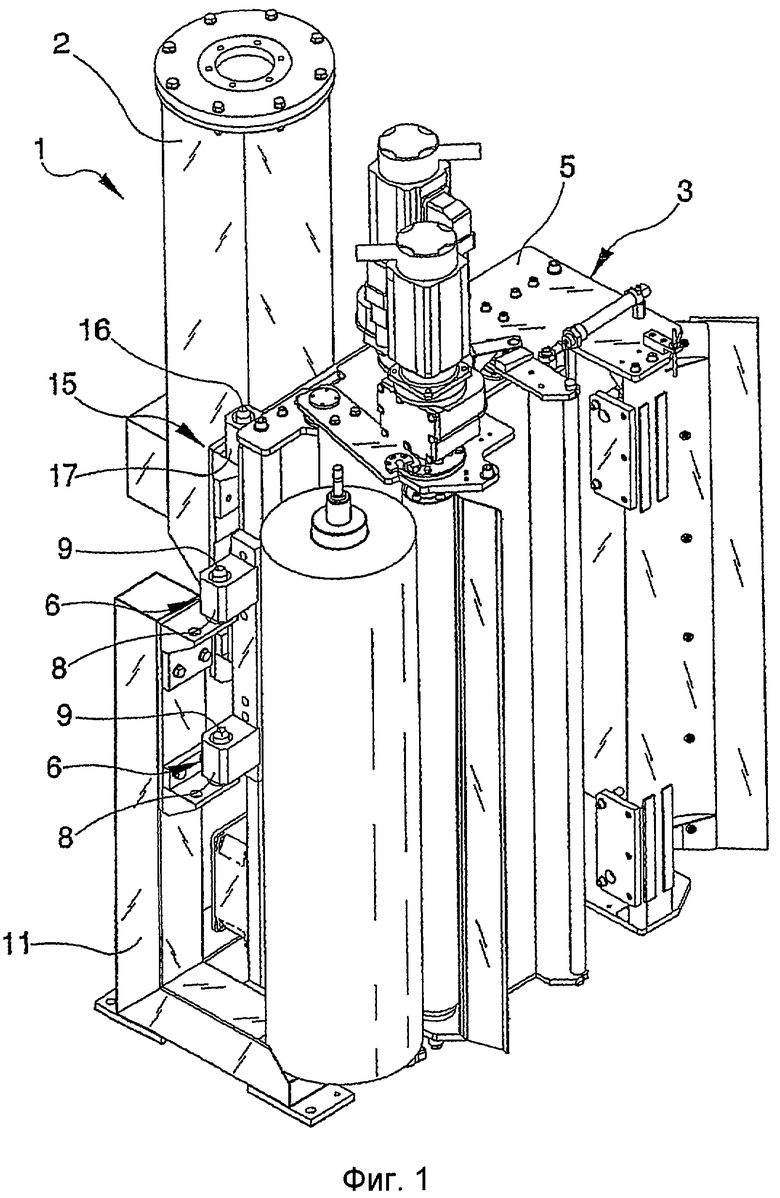
фиг.1 - аксонометрическое изображение части предлагаемой в изобретении системы во время фазы смены упаковочной головки;
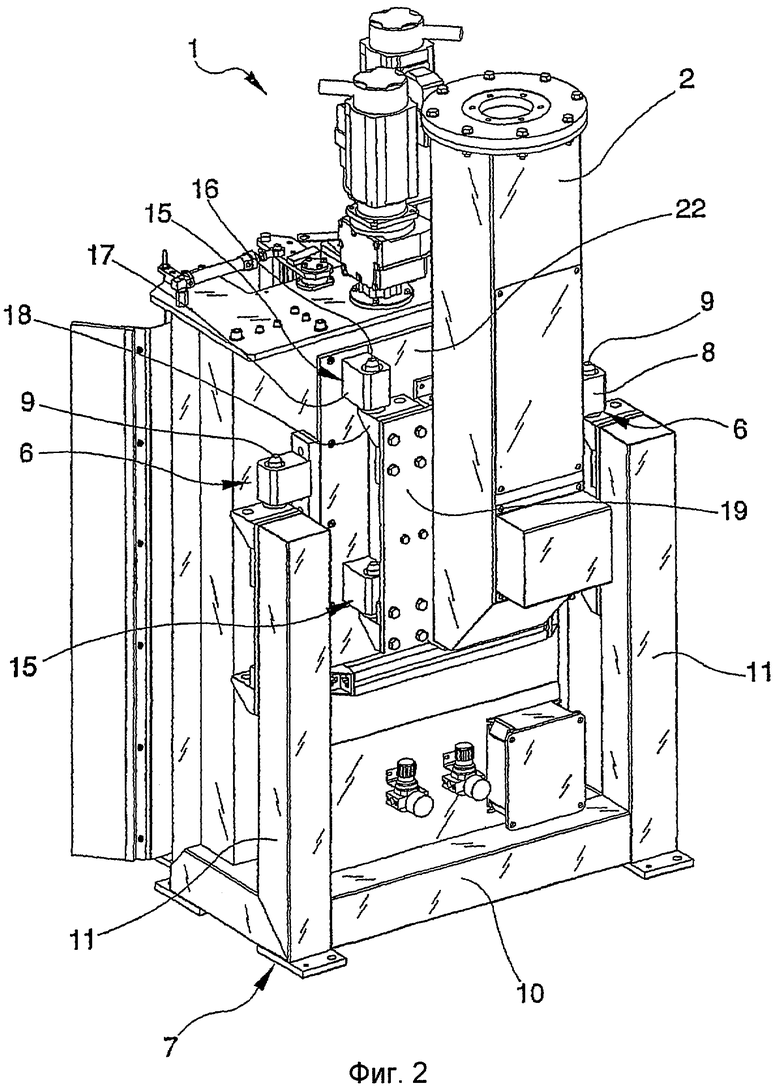
фиг.2 - аксонометрическое изображение представленной на фиг.1 системы под другим углом;
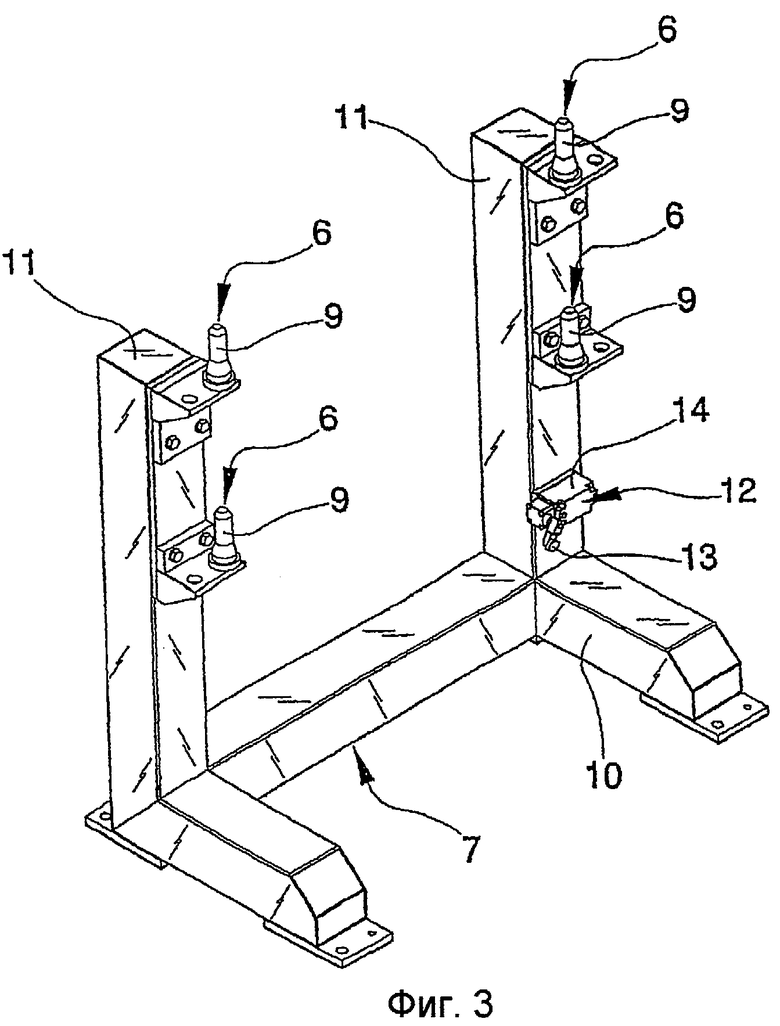
фиг.3 - аксонометрическое изображение внешней рамы, поддерживающей упаковочную головку на хранении, предусмотренном в системе в соответствии с настоящим изобретением;
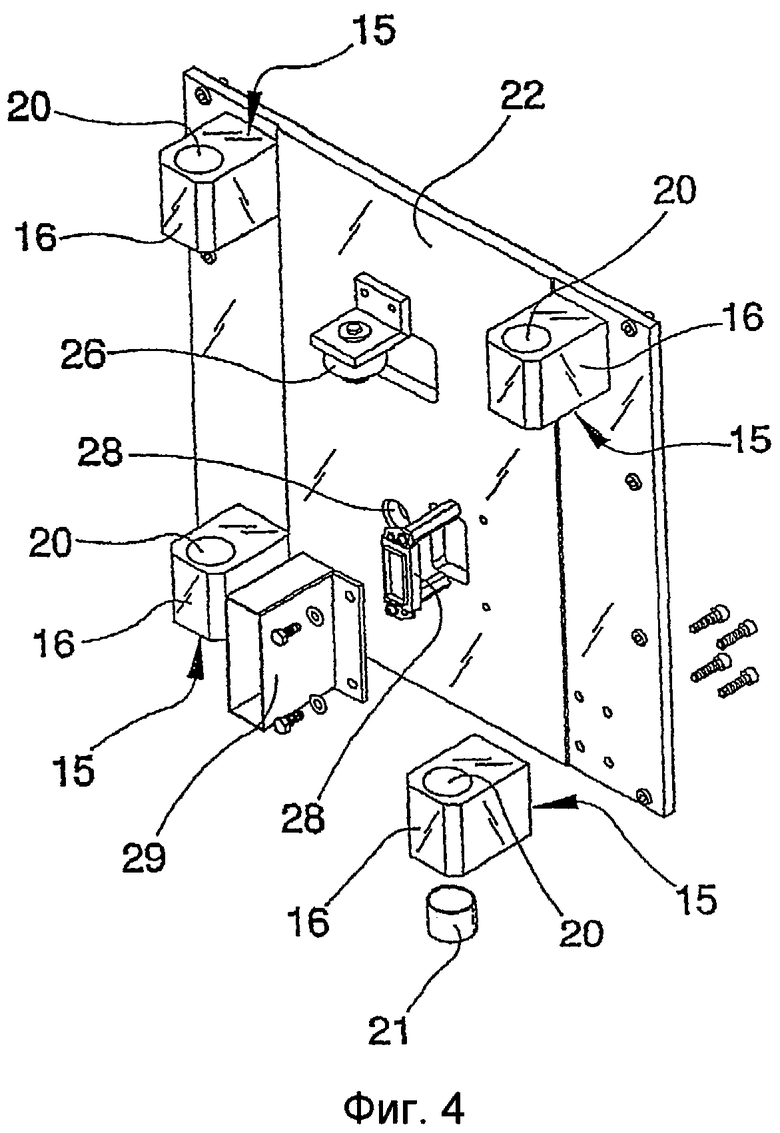
фиг.4 - покомпонентное изображение пластины для соединения упаковочной головки с подвижным автоматом системы согласно изобретению;
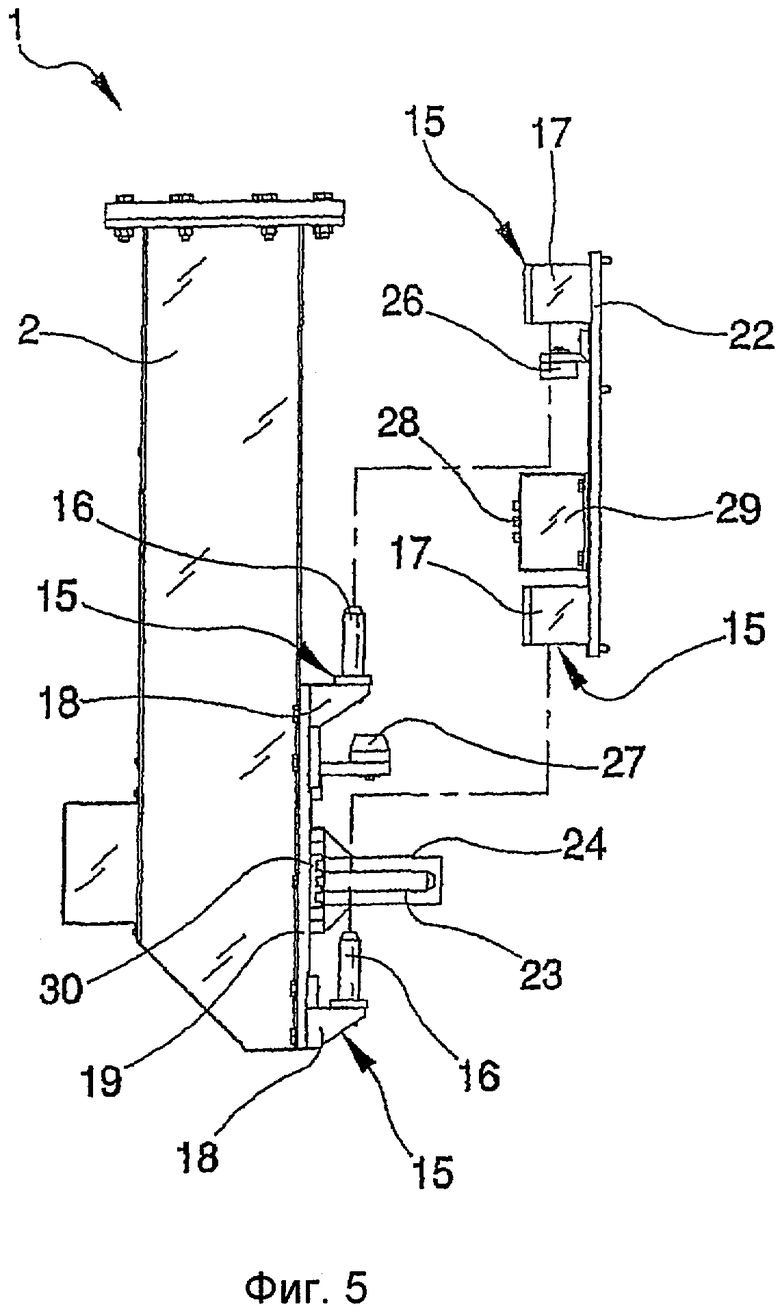
фиг.5 - вертикальный вид сбоку части подвижного автомата и пластины для соединения с упаковочной головкой до взаимного зацепления;
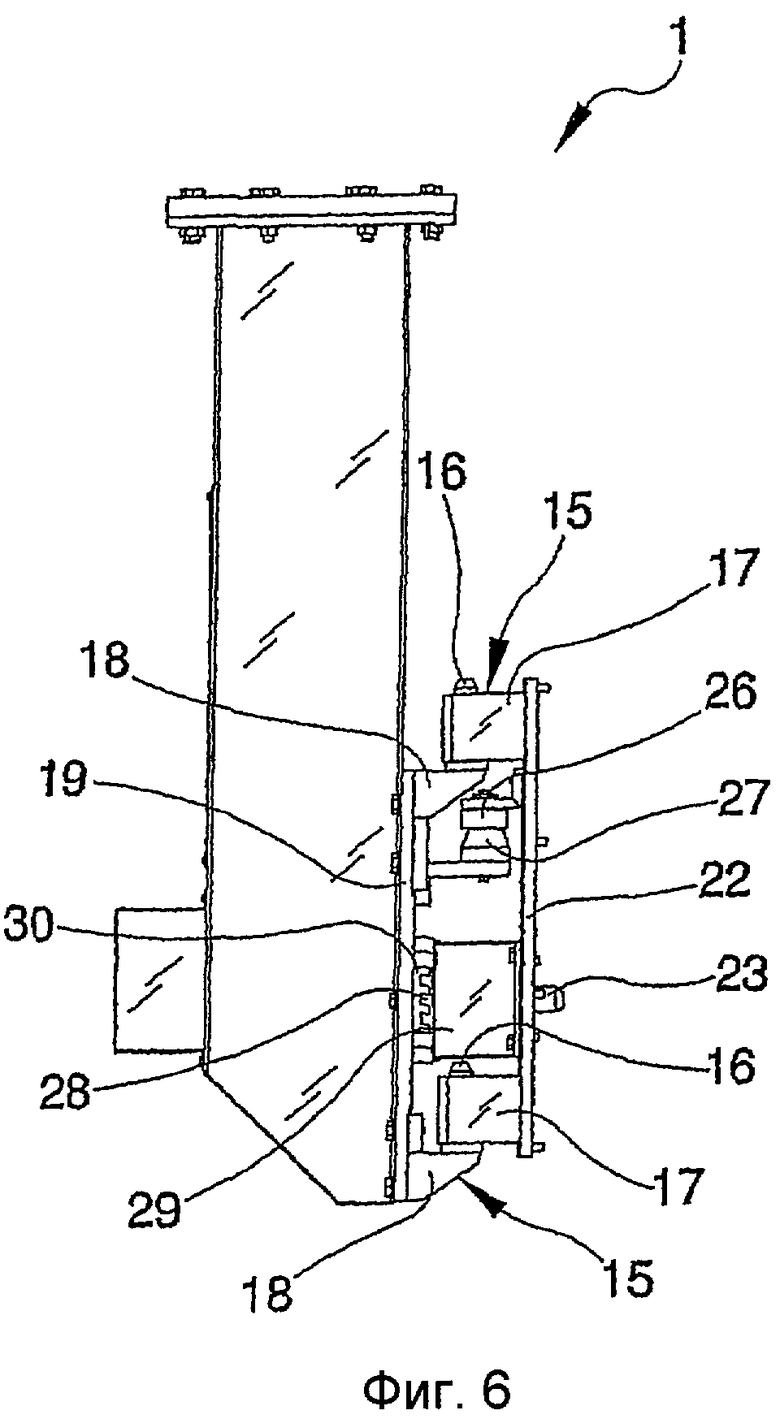
фиг.6 - вертикальный вид сбоку части подвижного автомата и соединительной пластины, показанной на фиг.5, в зацеплении.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ниже со специальными ссылками на данные чертежи система для упаковывания размещенных на поддонах грузов или им подобных будет обозначаться ссылочной позицией 1.
Система 1 содержит подвижный автомат 2 для одной упаковочной головки 3, имеющей катушку 4 с пленкой для упаковывания груза (груз не показан). Преимущественно, подвижный автомат 2 содержит сочлененную руку робота (на чертежах показан только ее свободный конец), используемую для захвата упаковочной головки 3.
Детально, упаковочная головка 3 имеет коробчатый корпус 5, где размещаются устройства для вращения катушки 4, чтобы предварительно вытянуть упаковочную пленку и обмотать ее вокруг груза (пригодно для всех существующих типов пленки).
Коробчатый корпус 5 имеет переднюю часть, которая при работе обращена к упаковываемому грузу, и заднюю часть, оснащенную первыми подвижными соединительными средствами 6 во внешней опорной раме 7, где хранится упаковочная головка 3.
В частности, первые подвижные соединительные средства 6 состоят из четырех вертикальных осевых муфт 8, распределенных на задней стороне упаковочной головки 3 и имеющих возможность вступать в зацепление, в основном без свободного хода и взаимовлияния, и такого же количества вертикальных штифтов 9, выполненных на внешней раме 7.
Внешняя рама 7 имеет балочную конструкцию, характеризующуюся опорой 10, устанавливаемой на полу, от которой вверх отходят две стойки 11, при этом на каждой из них находится пара вертикальных штифтов 9.
Внешняя рама 7 также имеет устройства обнаружения 12 упаковочной головки 3, находящейся на хранении.
Устройства обнаружения 12 представляют собой, например, чувствительный элемент 13, установленный с возможностью поворота на основании одной из стоек 11; когда упаковочная головка устанавливается на внешней раме 7, контактный элемент 13 отталкивается вниз, взаимодействуя с возвратной пружиной и активируя электронный датчик 14, с которым он связан.
Практично оснастить упаковочную головку 3 вторыми подвижными соединительными средствами 15 для подвижного автомата 2.
Вторые подвижные соединительные средства 15 имеют множество крепежных элементов 16, выступающих главным образом в вертикальном направлении из руки робота 2, и множество опорных элементов 17, соединяемых с упаковочной головкой 3, которая может вступать в зацепление с крепежными элементами 16 вдоль общего и по существу вертикального направления зацепления и расцепления.
Крепежные элементы 16 и опорные элементы 17 неразрывно и жестко связаны соответственно с подвижным автоматом 2 и упаковочной головкой 3.
В частности, крепежные элементы 16 представляют собой четыре вертикальных штифта, смонтированных на таком же числе кронштейнов 18 там, где у квадратной пластины 19 имеются четыре вершины.
В свою очередь пластина 19 вертикально связана со свободным концом руки робота 2.
Опорные элементы 17 представляют собой четыре блока с соответствующими вертикальными пазами 20, в которых располагается такое же количество износоустойчивых втулок 21, изготовленных из полимерного материала, для их вставки без свободного перемещения и задевания штифтов 16.
Блоки 17 смонтированы на четырех вершинах листа 22, вертикальным образом соединенного с задней частью коробчатого тела 5.
В соответствии с конкретным вариантом осуществления изобретения, представленным на чертежах, штифты 16 смонтированы на подвижном автомате 2 так, что они выступают вверх и могут снизу вставляться в блоки 17, соединенные с упаковочной головкой 3, и при работе поддерживать вес упаковочной головки 3.
Не исключено применение альтернативных вариантов осуществления настоящего изобретения, где крепежные элементы 16 соединяются с упаковочной головкой 3, выступая вниз и при работе свисая внутрь блоков 17, смонтированных на свободном конце руки робота 2; следует обратить внимание, что в этом случае также соединение штифтов 16 и блоков 17 и последующая установка упаковочной головки 3 осуществляются подъемом руки робота 2 движением с пола вверх.
Вторые подвижные соединительные средства 15 также снабжены удерживающими средствами 23, которые предотвращают скольжение штифтов 16 и блоков 17 после их соединения.
Подобные удерживающие средства содержат стержень, связанный подвижным автоматом 2 с возможностью скольжения в поперечном к штифтам 16 и пластинам 19 направлении.
Детально, стержень 23 располагается в трубчатой секции 24, перпендикулярно выступающей из пластины 19, из которой стержень 23 может быть извлечен, чтобы входить в соответствующее сквозное отверстие 25, выполненное примерно в середине листа 22.
Практично, чтобы предполагалось использование устройств пневматического и электронного соединения, которые могут устанавливаться между упаковочной головкой 3 и подвижным автоматом 2, назначение указанных устройств - подавать сжатый воздух и электричество к устройствам, находящимся в коробчатом корпусе 5, для обеспечения функционирования упаковочной головки 3.
Детально, устройства пневматического соединения содержат первый соединительный элемент 26, выступающий из листа 22 над отверстием 25 и обращенный вниз, и второй соединительный элемент 27, присоединенный к пластине 19 и обращенный вверх.
По существу, два соединительных элемента 26 и 27 могут соединяться один с другим, когда упаковочная головка установлена на подвижном автомате 2.
Вышеупомянутые устройства электронного соединения содержат первый электронный разъем 28, расположенный на опорной и защитной стойке 29 так, что он выступает из листа 22, находясь у отверстия 25, и второй электронный разъем 30, соединенный с пластиной 19, который может электрически соединяться с первым электронным разъемом 28, когда упаковочная головка 3 устанавливается на подвижный автомат 2.
Ниже описывается функционирование предлагаемой в изобретении системы.
Когда упаковочная головка 3 находится на хранении, она располагается на внешней раме 7 за счет зацепления муфт 8 с вертикальными штифтами 9.
Чтобы установить упаковочную головку 3 на подвижный автомат 2, пластина 19 подается к листу 22 так, что штифты 16 оказываются ниже блоков 17, точно на одной линии с вертикальными пазами 20.
Свободный конец руки робота 2 теперь поднимается, чтобы штифты 16 могли войти в вертикальные пазы 20, а упаковочная головка 3 расположилась напротив руки робота 2.
Следует обратить внимание, что при совмещении по оси штифтов 16 и вертикальных пазов 20 соединительные элементы 26 и 27 располагаются один под другим и вступают в зацепление при поднятии руки робота 2.
То же самое происходит при взаимном соединении электронных разъемов 28 и 30.
Кроме того, по окончании сборки трубчатая секция 24 точно совмещается с отверстием 25; когда стрежень 23 выходит из трубчатой секции 24 и входит в отверстие 25, он блокирует выход штифтов 16 из блоков 17, что делает возможным зафиксировать соединение упаковочной головки 3 со свободным концом руки робота 2.
Выше фактически описано, как достигаются стоявшие перед изобретением цели.
Предлагаемое изобретение допускает многочисленные модификации и варианты, которые входят в объем изобретения, при этом все используемые детали могут быть заменены другими, являющимися их техническими эквивалентами.
На практике, используемые материалы, а также формы и размеры элементов могут быть любыми, подобранными в соответствии с требованиями без нарушения объема защиты нижеследующей формулы изобретения.
Система содержит по меньшей мере один подвижный автомат с по меньшей мере одной упаковочной головкой, оснащенной по меньшей мере одной катушкой с пленкой для упаковывания груза. Упаковочная головка, содержит первые подвижные соединительные средства во внешней опорной раме для хранения головки и вторые подвижные соединительные средства в подвижном автомате. При этом вторые подвижные соединительные средства содержат по меньшей мере один по существу вертикальный крепежный элемент, соединенный по меньшей мере с чем-то одним из упаковочной головки и подвижного автомата, и по меньшей мере один опорный элемент, соединенный с другим элементом из упаковочной головки и подвижного автомата. Причем опорный элемент может быть соединен с упомянутым крепежным элементом вдоль общего и по существу вертикального направления зацепления и расцепления. Изобретение обеспечивает упрощение конструкции и эксплуатации. 22 з.п. ф-лы, 6 ил.
1. Система для упаковывания грузов, имеющая по меньшей мере один подвижный автомат с по меньшей мере одной упаковочной головкой, оснащенной по меньшей мере одной катушкой с пленкой для упаковывания груза, при этом упаковочная головка содержит первые подвижные соединительные средства во внешней опорной раме для хранения головки и вторые подвижные соединительные средства в подвижном автомате, отличающаяся тем, что вторые подвижные соединительные средства содержат по меньшей мере один, по существу, вертикальный крепежный элемент, соединенный по меньшей мере с чем-то одним из упаковочной головки и подвижного автомата, и по меньшей мере один опорный элемент, соединенный с другим из упаковочной головки и подвижного автомата, и который может быть соединен с упомянутым крепежным элементом вдоль общего и, по существу, вертикального направления зацепления и расцепления.
2. Система по п.1, в которой крепежный и опорный элементы жестко связаны по меньшей мере с чем-то одним из упаковочной головки и подвижного автомата.
3. Система по п.1, в которой крепежный элемент представляет собой, по существу, вертикальный штифт.
4. Система по п.1, в которой крепежный элемент содержит блок с пазом под упомянутый крепежный элемент.
5. Система по п.1, в которой крепежный элемент соединен с подвижным автоматом и выступает вверх.
6. Система по п.1, в которой крепежный элемент соединен с упаковочной головкой и выступает вниз.
7. Система по п.1, в которой вторые подвижные соединительные средства содержат по меньшей мере одну, по существу, вертикальную пластину, которая соединена по меньшей мере с чем-то одним из упаковочной головки и подвижного автомата и которая поддерживает упомянутый крепежный элемент.
8. Система по п.1, в которой вторые подвижные соединительные средства содержат по меньшей мере один, по существу, вертикальный лист, с которым соединяется опорный элемент.
9. Система по п.7, в которой упомянутая пластина имеет, по существу, прямоугольную форму.
10. Система по п.8, в которой упомянутый лист имеет, по существу, прямоугольную форму.
11. Система по п.1, в которой вторые подвижные соединительные средства содержат множество упомянутых крепежных и опорных элементов.
12. Система по п.9, в которой вторые подвижные соединительные средства содержат четыре крепежных элемента, соединенных с четырьмя вершинами пластины.
13. Система по п.10, в которой вторые подвижные соединительные средства содержат четыре опорных элемента, соединенных с четырьмя вершинами листа.
14. Система по п.1, в которой вторые подвижные соединительные средства содержат удерживающие средства, которые могут предотвращать скольжение крепежного и опорного элементов.
15. Система по п.14, в которой удерживающие средства содержат по меньшей мере один стержень, соединенный с подвижным автоматом, при этом стержень скользит в поперечном к крепежным элементам направлении и может входить в соответствующее отверстие, выполненное на упаковочной головке.
16. Система по п.15, в которой вторые подвижные соединительные средства содержат по меньшей мере один вертикальный лист, с которым соединен опорный элемент, при этом упомянутое сквозное отверстие выполнено в листе.
17. Система по п.1, которая содержит устройства пневматического соединения, которые могут размещаться между упаковочной головкой и подвижным автоматом.
18. Система по п.17, в которой устройства пневматического соединения содержат по меньшей мере первый соединительный элемент, соединенный с упаковочной головкой и обращенный вниз, и по меньшей мере второй соединительный элемент, соединенный с подвижным автоматом, обращенный вверх и имеющий возможность соединения с первым соединительным элементом.
19. Система по п.1, которая содержит устройства электронного соединения, которые могут размещаться между упаковочной головкой и подвижным автоматом.
20. Система по п.19, в которой вторые подвижные соединительные средства содержат по меньшей мере одну, по существу, вертикальную пластину, соединенную по меньшей мере с чем-то одним из упаковочной головки и подвижного автомата и поддерживающую крепежный элемент;
вторые подвижные соединительные средства дополнительно содержат по меньшей мере один, по существу, вертикальный лист, соединенный с опорным элементом, и
устройства электронного соединения содержат первый электронный разъем, соединенный с листом, и второй электронный разъем, соединенный с пластиной и имеющий возможность вступать в электронное соединение с первым соединительным разъемом.
21. Система по п.20, в которой первый электронный разъем смонтирован так, что он выступает из листа, находясь по меньшей мере на одной поддерживающей и защитной стойке.
22. Система по п.1, в которой внешняя рама содержит устройства обнаружения упаковочной головки.
23. Система по п.22, в которой устройства обнаружения содержат по меньшей мере один чувствительный элемент, соединенный с электронным датчиком.
| ПЕРСОНАЛИЗИРОВАННЫЕ ПРЕДЛОЖЕНИЯ УСЛУГ ПОДКЛЮЧЕНИЯ | 2020 |
|
RU2810124C1 |
| US 4722170 A, 02.02.1988 | |||
| US 4095395 A, 20.06.1978 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПАКОВКИ ИЗДЕЛИЙ ПУТЕМ ЗАВЕРТЫВАНИЯ | 1994 |
|
RU2114773C1 |

