Изобретение относится к электротехнике, а именно к устройствам автоматического управления электродвигателями, обеспечивающим требуемые критерии оптимальности для режимов поддержания частоты вращения, момента и мощности на валу электродвигателя при питании от ограниченного источника мощности. Устройство может быть использовано в электроприводах горных машин, общепромышленных механизмов и т.д. (например, карьерных экскаваторах), где необходимо реализовать режимы максимальных токов при низких скоростях вращения двигателя, питание которых происходит от источника ограниченной мощности.
Известен электропривод с автономным источником питания (А.С. СССР №1236594, Н02Р 5/06, 07.06.86 г.), включающий управляемый блок переключения, который позволяет в зависимости от задания подавать на вход регулятора частоты вращения обратную связь по мощности или по частоте вращения. Устройство реализуется на основе управляемого блока переключения, первый вход которого соединен с пороговым элементом, через который приходит сигнал задания, а остальные коммутируемые входы соединены соответственно с датчиком частоты вращения и датчиком мощности. Выход управляемого блока переключения подключен к входу регулятора частоты вращения, что обеспечивает оптимальные режимы работы двигателя за счет поддержания мощности в любом диапазоне регулирования и защиту от перегрузки.
Недостатком данного способа реализации устройства автоматического управления является отсутствие независимых каналов регулирования основных координат электродвигателя.
Известна система контроля энергопотребления асинхронного двигателя (Asynchronous motor power supply control system, US 19940357854, H02P 23/06, 19.11.1996 г.), включающая в том числе регулятор частоты вращения, ограничитель тока а также регулятор момента.
Недостатком данного способа реализации устройства автоматического управления является последовательное включение регуляторов и ограничителя в цепи управления, что приводит к невозможности реализации независимых каналов регулирования в системе управления электродвигателем.
Известно принимаемое за прототип устройство для автоматического управления электродвигателями, обеспечивающее оптимальное по быстродействию регулирование частоты вращения электродвигателей (А.С. СССР №964938, Н02Р 5/06, 08.01.81 г.), включающее оценку оптимальной по быстродействию траектории скорости электропривода и отклонение движения от рассматриваемых участков оптимальной траектории. Способ реализуется на основе использования перестраиваемого и стационарного функциональных преобразователей оценивающих отклонения движения системы от участков оптимальной траектории, причем перестраиваемый функциональный преобразователь настраивается автоматически в соответствии с текущими значениями величины заданной скорости.
Недостатком прототипа является невозможность использования этой системы управления для электродвигателя переменного тока, которые на сегодняшний день значительно чаще используются в промышленности, а также отсутствие канала регулирования по моменту на валу электродвигателя.
Технический результат изобретения заключается в обеспечении режимов максимальных крутящих моментов при низких скоростях вращения двигателя, стабилизации скорости движения в широком диапазоне и ограничения мощности, потребляемой от источника энергии.
Технический результат достигается тем, что устройство автоматического управления электроприводом переменного тока при питании от источника ограниченной мощности, содержащее асинхронный электродвигатель, подключенный к сети через преобразователь частоты, наблюдатель основных координат (момент на валу, частота вращения, поток) электродвигателя, на вход которого поступает сигнал о токах и напряжениях, подводимых к электродвигателю, которые измеряются при помощи датчиков, а первый, второй, и третий выходы наблюдателя соединены со вторыми входами регуляторов частоты вращения, момента и потребляемой мощности, первые входы которых соединены с пультом управления через задатчик интенсивности, согласно изобретению в устройство автоматического управления введено логическое устройство коммутации, второй, третий и четвертый входы которого соединены соответственно с выходами регуляторов частоты вращения, момента и потребляемой мощности, пятый и первый входы соответственно с четвертым выходом наблюдателя основных координат и пультом управления, а выход - с преобразователем частоты.
Изобретение поясняется чертежом, где изображено устройство автоматического управления электроприводом переменного тока при питании от источника ограниченной мощности, где 1 - регулятор мощности, 2 - регулятор момента, 3 - регулятор частоты вращения, 4 - задатчик интенсивности, 5 - логическое устройство коммутации, 6 - питающая сеть, 7 - преобразователь частоты, 8 - датчики токов и напряжений, 9 - электродвигатель, 10 - наблюдатель основных координат, 11 - пульт управления.
Предлагаемый способ поясняется чертежом, где представлена функциональная схема устройства, причем у регулятора 1 мощности, регулятора 2 момента, регулятора 3 частоты вращения и логического устройства коммутации 5 входы, а у наблюдателя основных координат 10 выходы обозначены отдельно. Устройство содержит электродвигатель 9, который подключен к питающей сети 6 через преобразователь частоты 7. Выходы датчиков 8 токов и напряжений, подводимых к электродвигателю, подключены к наблюдателю 10 основных координат, четвертый выход которого соединен с пятым входом логического устройства коммутации 5, а первый, второй и третий выходы соединены соответственно со вторыми входами регуляторов частоты вращения 3, момента электродвигателя 2 и регулятора мощности 1. В наблюдателе 10 основных координат производится оценка частоты вращения ротора, момента на валу электродвигателя, а также потребляемой электродвигателем мощности. Команды с пульта управления 11 поступают как на первый вход логического устройства коммутации 5, так и на задатчик интенсивности 4, выход которого соединен с первыми входами регуляторов 3, 2 и 1. После оценки логическим устройством коммутации 5 режима работы электродвигателя на основании данных из наблюдателя 4 основных координат оно формирует задание для преобразователя частоты 7.
Ниже поясняется логика работы логического устройства коммутации 5, причем регулируемые уставки выбора режима работы находятся в значении 0,1ωн и 0,9ωн, причем ωн - номинальная, a ω1 - реальная частота вращения электродвигателя. При получении с задатчика интенсивности задание скорости ω1≤0,1ωн управление электродвигателем осуществляется по каналу регулирования моментом, при входе ω1 в зону 0,1ωн<ω1<0,9ωн по каналу регулирования скорости, а при ω1≥0,9ωн снова по каналу регулирования моментом. Сигнал регулятора мощности 1 имеет более высокий приоритет, чем сигналы с регуляторов 2 и 3, а регулятор 1 мощности включается в работу при достижении электродвигателем максимальной заданной мощности, выполняя функцию ограничения потребляемой мощности, в результате чего реализуется переменная структура управления, обеспечивающая режимы максимальных токов при низких скоростях вращения двигателя, режимы стабилизации скорости двигателя в широком диапазоне и режимы ограничения мощности, потребляемой от источника энергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Вентильный электропривод постоянного тока | 1981 |
|
SU970619A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Вентильный электропривод постоянного тока | 1981 |
|
SU974535A1 |
| УСТРОЙСТВО АДАПТИВНОГО УПРАВЛЕНИЯ СТАНКОМ | 2015 |
|
RU2594049C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
Изобретение относится к области электротехники и может быть использовано в электроприводах горных машин, общепромышленных механизмов и т.д. Техническим результатом является обеспечение режимов максимальных крутящих моментов при низких скоростях вращения электродвигателя, стабилизации скорости движения в широком диапазоне и ограничения мощности, потребляемой от источника энергии. В устройстве автоматического управления используют три независимых локальных регулятора и коммутатор, который включает в работу один из локальных регуляторов в соответствии с логической таблицей переключений и режимом работы электродвигателя. 1 ил.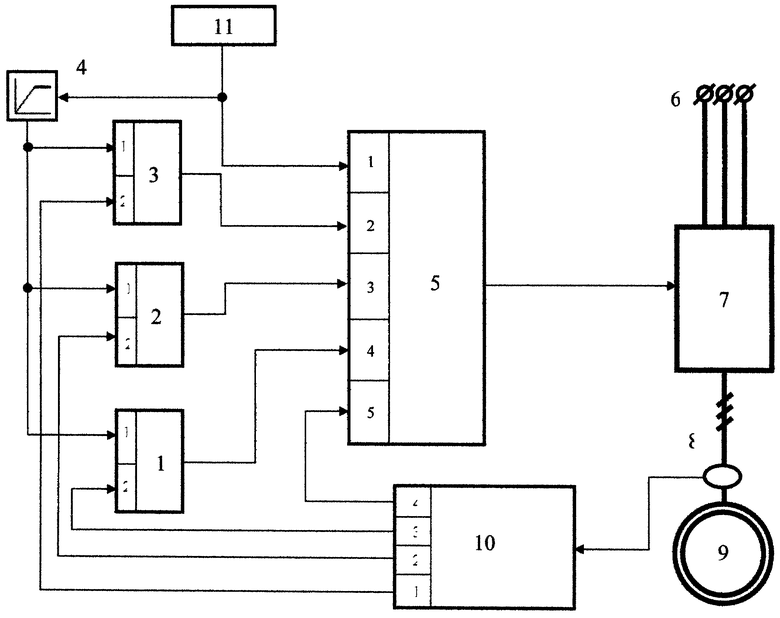
Устройство автоматического управления электроприводом переменного тока при питании от источника ограниченной мощности, содержащее асинхронный электродвигатель, подключенный к сети через преобразователь частоты, наблюдатель основных координат (момент на валу, частота вращения, поток) электродвигателя, на вход которого поступает сигнал о токах и напряжениях, подводимых к электродвигателю, которые измеряются при помощи датчиков, а первый, второй и третий выходы наблюдателя соединены со вторыми входами регуляторов частоты вращения, момента и потребляемой мощности, первые входы которых соединены с пультом управления через задатчик интенсивности, отличающееся тем, что в устройство автоматического управления введено логическое устройство коммутации, второй, третий и четвертый входы которого соединены соответственно с выходами регуляторов частоты вращения, момента и потребляемой мощности, пятый и первый входы соответственно - с четвертым выходом наблюдателя основных координат и пультом управления, а выход - с преобразователем частоты.
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПРИВОДА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2222097C2 |
| RU 98111752 А, 10.04.2000 | |||
| Электропривод | 1981 |
|
SU964938A1 |
| US 6984955 B2, 10.01.2006 | |||
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2021 |
|
RU2785470C1 |
| JP 200324890 A, 24.11.2000 | |||
| Штепсельный разъем | 1978 |
|
SU858155A1 |
| WO 9745777 A2, 04.12.1997. | |||

